
Abstract
Proprioception of hand orientation (orientation production using the hand) is compared with manual matching of visual orientation (visual surface matching using the hand) in two experiments. In experiment 1, using self-selected arm postures, the proportions of wrist and elbow flexion spontaneously used to orient the pitch of the hand (20 and 80%, respectively) are relatively similar across both manual matching tasks and manual orientation production tasks for most participants. Proprioceptive error closely matched perceptual biases previously reported for visual orientation perception, suggesting calibration of proprioception to visual biases. A minority of participants, who attempted to use primarily wrist flexion while holding the forearm horizontal, performed poorly at the manual matching task, consistent with proprioceptive error caused by biomechanical constraints of their self-selected posture. In experiment 2, postural choices were constrained to primarily wrist or elbow flexion without imposing biomechanical constraints (using a raised forearm). Identical relative offsets were found between the two constraint groups in manual matching and manual orientation production. The results support two claims: (1) manual orientation matching to visual surfaces is based on manual proprioception and (2) calibration between visual and proprioceptive experiences guarantees relatively accurate manual matching for surfaces within reach, despite systematic visual biases in perceived surface orientation.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The environment we live in consists of various surfaces. Light interacting with these surfaces provides optical information (e.g., the ambient optical array; Gibson 1979) to the visual system, which helps observers to perceive the three-dimensional structure of the environment. Perceived surface information, especially perceived surface orientation, is fundamental to space perception. Understanding the perceptual coding of surface orientation helps determine the representation of space.
Like most perceptual variables, perceived surface orientation is complicated to measure. A number of methods have been used in the literature. Numerical estimation (verbal report) has often been employed to study both absolute and relative slant perception (Li and Durgin 2009, 2010; Proffitt et al. 1995; Todd et al. 2005). Although often regarded as variable and subject to cognitive biases, systematic studies have shown that numerical estimation of perceived slant is not an intrinsically biased measure (Durgin et al. 2010b; Li and Durgin 2010); for example, Li and Durgin (2010) used an aspect ratio task to estimate perceived surface orientation relative to gaze (optical slant; Sedgwick 1986). The task involved comparing the apparent length in depth of a sagittal interval along the sloped axis of a surface to a frontal, horizontal interval on the surface (the two intervals, together, formed an L-shape in depth). Li and Durgin showed that the aspect ratio task provided implicit slant estimates (based on projective geometry) in close correspondence with explicit verbal estimates of perceived optical slant given by other participants.
A popular non-verbal approach to study perceived surface orientation is perceptual matching, including both visual matching and manual matching. Visual matching involves comparison or matching between the target orientation and a comparison orientation presented in either 2D or 3D form (e.g., Li and Durgin 2009; Norman et al. 1995). But there is evidence that perception of the comparison orientation is itself biased; for example, the perception of 2D orientation is subject to systematic perceptual biases whether measured as absolute orientation (Dick and Hochstein 1989; Durgin and Li 2011a) or as an angular deviation from a horizontal reference (Fisher 1968; Jastrow 1892; Wundt 1862). This complicates the interpretation of visual matching data. Manual matching involves comparison between vision and somatosensory information. Several manual matching techniques have appeared in the literature, including haptic variants of 2D orientation matching (McIntyre and Lipshits 2008). We will consider three techniques here that are all based on surface orientation matching.
The palm board, introduced by Gibson, might be the earliest manual matching technique used to study perceived slant. Participants rotate the palm board by hand to match the surface orientation they perceive (Gibson and Cornsweet 1952; Norman et al. 2009; Proffitt et al. 1995). Some have argued that adjusting a palm board is a visually guided action (Proffitt et al. 1995) because of its apparent accuracy of estimating hills and of apparent dissociations between the palm board and other perceptual measures (i.e., verbal report and visual matching). However, these claims have recently been falsified by the evidence that palm board measures grossly underestimate the orientations of surfaces within reach (Durgin et al. 2010a) and may not truly dissociate; that is, null statistical effects on palm boards were often used to argue for a dissociation (no effect on palm boards paired with a positive change in verbal estimates), even though the trend in the palm board data was of the same proportional magnitude and direction of change as the statistically reliable verbal differences reported (see Durgin et al. 2011).
Bridgeman and Hoover (2008) avoided the palm board by developing a free arm measure in their outdoor hill slope perception study. Their participants were required to keep their hand and forearm in a straight line while adjusting their forearm/hand orientation to match perceived hill slant. They found that the free arm overestimated the surface orientations of hills, which is consistent with most other measures.
Recently, a free hand was used as an alternative manual matching measure of perceived slant (Durgin et al. 2010a, b; Hajnal et al. 2011; Li and Durgin 2011). In the free-hand measure, participants hold their unseen hand in the air while attempting to match hand pitch orientation to visually perceived surface slant. Participants performed the task quite accurately. The orientation of the central plane of the hand (see Fig. 5 in Durgin et al. 2010b for details) tends to be linearly related to the physical surface slant for surfaces in reach, with a linear regression slope of essentially 1. Consistent with other evidence that far surfaces appear steeper than near surfaces, the free-hand measure overestimates the orientations of hills.
The excellent free-hand matching for slants in reach is somewhat at odds with results from other perceptual measures that suggest systematic biases in near-space orientation perception (Durgin et al. 2010b; Li and Durgin 2010, 2011). One possibility is that action is separated from conscious perception, so that it is immune to visual distortion (Goodale and Milner 1992; Haffenden and Goodale 1998; Milner and Goodale 1995). Another possibility is that proprioception (i.e., proprioceptive perception of the orientation of the hand itself) is also misperceived, but in a manner that is calibrated and consistent with the distorted visual representation (see Dassonville et al. 2004). If a two-system theory were relevant to explaining good manual matching for reachable surfaces, we would expect the relationship between free-hand and verbal measures for slants within reach to differ from those out of reach, because exaggeration in perceived slant increases with viewing distance (Bridgeman and Hoover 2008; Li and Durgin 2010). However, in contrast to this expectation, free-hand performances can be predicted by verbal measures of visual slant in both cases (Li and Durgin 2011). This suggests that the proprioceptive calibration hypothesis might apply to the present case.
Bingham et al. (2000) have previously considered and rejected the calibration account for reaching distance, because they found small, but systematic and reliable reaching errors in their experiments. However, the proprioceptive calibration hypothesis does not require visual bias to be perfectly compensated by the proprioceptive bias. The calibration hypothesis only needs to assume that the proprioceptive bias is similar enough to the visual bias, so that the residual difference between the two systems would not affect the efficiency of the corresponding actions. As long as the error in an action is within a tolerable range (especially if there is opportunity for online feedback), action would be efficient and successful. Moreover, although tight calibration might not be an appropriate goal for all visuomotor purposes (differential visual and proprioceptive bias can sometimes be advantageous—Smeets et al. 2006), it seems likely to work for slant gestures. Our main questions, in the present study, are (1) whether proprioception shows a similar pattern of bias to visual bias and (2) whether perturbations of proprioception produce similar perturbations of visual/manual matching. As a secondary issue, we were interested in documenting preferred arm postures used during accurate visual/manual matching such as the free-hand measure.
Experiment 1
There were two purposes in experiment 1. The first purpose was to measure proprioception of hand pitch. The second purpose was to examine spontaneous arm postures during the free-hand measure. In previous studies using free-hand measures (i.e., Durgin et al. 2010a, b; Li and Durgin 2011), the experimenter typically demonstrated a hand gesture to the participants while explaining the task. The demonstration involved flexing the elbow more than the wrist. In the present study, rather than demonstrating a posture, we only asked participants to use a comfortable posture when gesturing with their hand. Our experiment, thus, provides normative information about hand orientation gesturing.
Methods
Participants
Twenty-one Swarthmore undergraduates (twelve women) participated in experiment 1 to fulfill a course requirement. All had normal or corrected to normal visual acuity. The experimental procedures reported in this article were approved by the local research ethics committee.
Apparatus
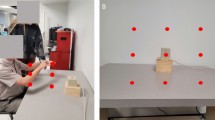
A VICON MX optical tracking system (VICON Co.) was used to monitor hand orientation and arm posture. Four reflective markers were attached to the participant‘s right arm and hand: one on the tip of the middle finger, one on the side of the wrist, one on the side of the elbow joint, and one on the top of the shoulder (Fig. 1a).

Biomechanical data from the visual surface matching task. The upper left panel a illustrates the VICON markers (drawn to scale) attached to the hand and arm, and defines the elbow and wrist angles. The upper right panel b shows the average arm postures of all participants in the visual surface orientation matching task. Each set of four dots of the same color represent the VICON markers. Different colors represent different visual slant conditions. In the lower panels, the mean elbow angle (c) and mean wrist angle (d) are plotted as functions of mean central hand orientation for the visual surface orientation matching task. Standard errors of the means are shown
Task and procedure
Each participant performed two tasks successively, that is, a visual surface orientation matching task followed by a proprioceptive orientation production task. In the orientation matching task, participants were asked to hold their right hand in the air so as to make it parallel with a wooden surface (~40 cm in diameter) mounted within arm’s reach. A screen blocked the participant’s view of their hand. The reference surface, which was of irregular shape, was presented on a mechanical apparatus that could be used to orient the surface precisely about a horizontal axis 1 cm below the center of the surface. Participants stood and faced the center of the surface (~1.5 m above the ground and ~0.6 m in front of the participants). The wooden surface was presented within a hemispheric enclosure of black felt ~2 m in diameter to obscure horizontal or vertical references. A horizontal platform (0.9 m above the ground) was set close to the right of the participants, behind the occluding screen. Before each trial, participants closed their eyes and flattened their right hand on the horizontal platform while the experimenter changed the wooden surface (randomly selected from 18 candidate boards) and set its orientation. When signaled, participants opened eyes and lifted their right hand in the air to match the slant of the surface. Participants were asked to keep their palm flat. They gave a verbal indication when satisfied and the experimenter marked the VICON recording. The procedure was then repeated for the next trial. Eight slants (6°, 18°, 30°, 42°, 54°, 66°, 78°, and 90°) were tested in each of the two randomly ordered blocks of trials.
In the proprioceptive orientation production task, participants were blindfolded and asked to set their hand to a verbally indicated orientation. The procedure was similar to that of the visual surface orientation matching task. Ten orientations (0°, 10° 20°, 30°, 40°, 50°, 60°, 70°, 80°, and 90°) were produced in a random order. In both the tasks, participants were asked to use a comfortable arm posture while gesturing with their hand. Typically, their hand and forearm were in a sagittal–parallel plane while their upper arm was raised laterally (Fig. 1a).
Orientation calibration
When participants gestured with their hand, the longitudinal axes of forearm and hand were approximately in a sagittal–parallel plane, which was parallel with the YZ plane of the VICON coordinates. Plotting the marker projections on the YZ plane provides a side view of the arm. Eight of the participants were additionally used to establish a baseline calibration after completing the two tasks. During the calibration, they sat and rested the forearm and hand on the horizontal platform. Averaged marker positions were obtained to determine the baseline of forearm orientation, which was used to calculate the absolute forearm pitch orientation for each trial. Before each trial, baseline orientation of the hand was also recorded with flattened hand on the horizontal platform.
Results
Surface orientation matching
Figure 1b shows the averaged arm postures of all participants in the visual surface orientation matching task. Participants flexed both their elbow and wrist while matching their hand to different visual slants. In order to quantify the use of the two joints, we define the angle formed by the longitudinal axes of the hand and forearm as the wrist angle, and the angle formed by the longitudinal axes of the upper arm and forearm as the elbow angle (Fig. 1a; following the definition of Darling 1991). Figure 1c and d show the mean elbow angle and mean wrist angle as functions of mean central hand orientation. The upper arm pitch orientation projected on the sagittal–parallel plane was almost constant. The mean elbow flexion gain is 0.7, and the mean wrist flexion gain is 0.31 of resultant changes in hand orientation.
During the experiment, we observed that a few participants tended to hold their forearm orientation constant and flex primarily the wrist. We suspect the strategy was adopted not out of laziness, but in an effort to maintain a controlled posture or as a more reliable way to sense the hand orientation because only one joint flexion needs to be consulted. By separately examining these participants, we tested whether arm posture affected matching performance. Five participants (wrist group) had a higher wrist gain than elbow gain. The other sixteen are labeled the elbow group. Figure 2a and b show the average arm postures of the two groups. Mean elbow angle and mean wrist angle are plotted against mean central hand orientation for the two groups in Fig. 2c and d, respectively. The elbow group exhibited a mean elbow flexion gain of about 0.8, and a mean wrist flexion gain of about 0.2, which indicates that, for most people, elbow flexion contributed 80% to their hand rotation, while wrist flexion contributed only 20%.

Posture as a function of elbow use during the visual surface matching task. Average arm postures of the elbow group (a) and wrist group (b). Mean elbow angle (c) and mean wrist angle (d) plotted as functions of mean central hand orientation for the elbow group (open circles) and wrist group (solid circles). Standard errors of the means are shown
To see whether the different postures used by the two groups affected their orientation matching performance, mean central hand orientation is plotted as a function of physical slant for the two groups in Fig. 3. Performance of the elbow group (with a matching gain of 0.95) replicates the good performance in previous studies (e.g., Durgin et al. 2010b). In contrast, performance of the wrist group (with a matching gain of 0.69) is relatively poor; consistent with the observation that perceived wrist flexion relative to a horizontal forearm is exaggerated (Durgin et al. 2010a). We tested the effect of arm posture on hand matching performance using a mixed-effects model of the complete data set with subject as a random effect. The model revealed a reliable interaction between the arm posture and physical slant on the central hand orientation (t = 5.61, P < 0.0001).

Mean central hand orientation plotted as a function of the physical slant for the visual surface orientation matching task. Open circles represent the elbow group (N = 16). Solid circles represent the wrist group (N = 5). Standard errors of the means are shown
Orientation production
Because underuse of the elbow evidently undermines free-hand matching performance, we first examined the orientation production data for evidence of underuse of the elbow. Only two participants showed more wrist than elbow flexion in the production task, so their data, being too few to analyze, were simply excluded from analysis. The mean elbow flexion gain (relative to hand orientation) of the remaining nineteen participants was 0.79, and the mean wrist flexion gain was 0.21, which closely matches the typical spontaneous gains found for the manual matching task.
Mean central hand orientation of the nineteen participants is plotted as a function of the requested orientation in Fig. 4a. The data show systematic biases and indicate that participants overestimated their hand pitch orientation, with the result that they set their hand too low to match the indicated orientation. Figure 4b compares the hand proprioception data (open circles) to verbal estimation data (solid circles) of visually perceived slant within reachable distance under similar viewing conditions (data of Durgin et al. 2010b, experiment 1; with estimates collapsed across coding directions so that all are expressed relative to horizontal). The hand proprioception data are reverse plotted, so that requested orientation (verbally specified) is on the ordinate and produced orientation (physical orientation) is on the abscissa. The overall similarity of the two data sets is striking. A mixed-effects regression comparing the complete data sets found no reliable main effect of modality (visual vs. proprioceptive) on matched verbal reports (t = −0.99, P = 0.32), and no reliable interaction between modality and physical orientation (t = 0.58, P = 0.56).

Orientation production data. a Mean central hand orientation plotted as a function of the indicated orientation for the orientation production task. A polynomial fit (cubic) is shown. b Comparison between visually perceived surface orientation (solid circles estimation data from Durgin et al. 2010b; experiment 1) and proprioceptively perceived (verbally requested) hand pitch orientation (open circles). A polynomial (cubic) fit of the visually perceived slant is shown. Standard errors of the means are shown
Experiment 2
An unexpected finding in experiment 1 was that a minority of participants (i.e., wrist group) who spontaneously used an uncommon arm posture (maintaining a horizontal forearm) performed poorly at orientation matching. In experiment 2, we manipulated arm posture in both the surface orientation matching task and the orientation production task. For half of the participants (elbow group), we constrained the available range of wrist flexion, and for the other half (wrist group), we constrained the available range of elbow flexion. Because it has been reported that perceived wrist flexion is exaggerated when the forearm is horizontal (Durgin et al. 2010a), we chose here to use an elevated forearm orientation (i.e., by about 30°) for which absolute biomechanical constraints on upward wrist flexion would be alleviated.
Methods
Participants
Twenty-one Swarthmore undergraduates (ten women) participated in experiment 2 to fulfill a course requirement. None had participated in experiment 1. All had normal or corrected to normal visual acuity.
Apparatus and procedure
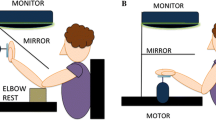
Two arm postures were examined. In the wrist restriction condition (elbow group), a rigid plastic stick (30 cm long, 2.5 cm wide and 0.7 cm thick) was strapped to the ventral side of the participant’s forearm and to the middle finger (Fig. 5, left panel). The longitudinal axes of the hand and forearm were kept in a straight line while the wrist could barely flex. The total weight added to the arm was about 30 grams. In the elbow restriction condition (wrist group), the orientation of the forearm was constrained by two rings (Fig. 5, right panel). The diameter of the higher and lower ring was 10 and 11 cm, respectively. Each ring was mounted (tilting 15° toward the participant) to a wooden frame that was set on top of a tripod. The height of apparatus was adjusted for each participant so that the higher ring was at the chest level of the participant. When the forearm was so restricted, it was tilted upward about 30° from horizontal in the sagittal plane. Thus, only 60° of upward wrist flexion was required to represent a vertical orientation. The upper arm was always partly raised laterally away from the body. Participants were asked to avoid body contact with the rings during gesturing, but were allowed to rest their forearm on the bases of the two rings between trials. Ten participants (five women) were assigned to the elbow group and the other eleven participants (five women) to the wrist group.

Illustration of the apparatus and arm postures used in experiment 2. Left panel wrist restriction condition (elbow group). Right panel elbow restriction condition (wrist group)
The tasks and procedures were similar to that in experiment 1. Participants performed the visual surface orientation matching and the proprioceptive orientation production tasks successively. In the visual surface orientation matching task, sixteen slants (0°, 6°, 12°, 18°, 24°, 30°, 36°, 42°, 48°, 54°, 60°, 66°, 72°, 78°, 84°. and 90°) were presented in random order. In the orientation production task, ten randomly ordered orientations (0°, 10°, 20°, 30°, 40°, 50°, 60°, 70°, 80°, and 90°) were requested.
Results
Surface orientation matching
Figure 6 shows the mean central hand orientation as a function of the actual slant for both the elbow group and wrist group in the visual surface orientation matching task. The elbow group showed a hand matching gain of 0.96, which was consistent with that of the elbow group in experiment 1. But, the intercept of the linear regression in the elbow group was about 5° smaller than that of the (post hoc) elbow group in experiment 1. This discrepancy may have been caused by the restriction on the wrist perturbing the calibrated arm–hand assembly or leading to a shifted reference frame for hand orientation. In contrast, the wrist group exhibited good performance (with a matching gain of 0.93 and an intercept of 0.21), which was much better than that of the wrist group in experiment 1. This suggests that absolute biomechanical constraints (limits of upward wrist flexion when the forearm was held horizontally) probably influenced proprioception of wrist flexion in the wrist group of experiment 1.

Mean central hand orientation plotted as a function of the physical surface orientation for the visual surface orientation matching task. Standard errors of the means are shown
Indeed, the performance of the wrist group was elevated compared to that of the elbow group in experiment 2. A mixed-effects model of the data found that orientation settings were 4.5° higher in the wrist group than in the elbow group (95% CI: 1.7°–7.3°, t = 3.06, P = 0.0024).
Orientation production
Based on the posture-induced separation between the functions in the visual surface orientation matching task, we should expect a similar separation in the proprioceptive orientation production task. Figure 7 shows the mean central hand orientation as a function of requested orientation for both the elbow group and wrist group in the orientation production task. There is, indeed, a shift apparent between the gesturing data of the two groups. The gestured hand orientations of the wrist group were consistently higher than that of the elbow group. This apparent difference was confirmed by a mixed-effects analysis. The model revealed a reliable 5.1° difference in the mean central hand orientation between the two groups (95% CI: 1.3°–9.1°, t = 2.19, P = 0.0295). In other words, the magnitude of separation between the two posture conditions was essentially identical to that found for the visual surface orientation matching task.

Mean central hand orientation plotted as a function of the indicated orientation for the proprioceptive orientation production task. Standard errors of the means are shown
General discussion
Perceptual variables are intrinsically difficult to measure. In research on space perception, action-based measures are often used in studying perceived distance and slant (e.g., Bingham and Pagano 1998; Gibson and Cornsweet 1952; Loomis et al. 1992; Norman et al. 2009; Rieser et al. 1990). In the present study, we examined an action-based measure of perceived surface orientation—gesturing with a free hand. We found that most people spontaneously adopted an arm posture with the total hand rotation being determined 20% by wrist flexion and 80% by elbow flexion. Their gesturing was fairly accurate. In contrast, hand gesturing substantially underestimated slant when it spontaneously relied on wrist flexion, and forearm orientation was maintained close to horizontal. This may help explain why underestimation is found with waist-level palm boards where the forearm is held even below horizontal (Durgin et al. 2010a). The results suggest that even the free-hand measure of perceived slant is affected by choice of arm posture.
In experiment 2, we constrained arm posture, while avoiding restricting the forearm to a horizontal orientation. We found that performance differed slightly but reliably by posture condition in this case and that differences observed in matching tasks were identical to those observed in orientation production tasks.
The results of both experiments indicate there is a systematic orientation bias in the proprioception of hand pitch. Systematic production errors in hand orientation proprioception corresponded with errors observed in verbal reports of visual orientation. A very similar bias function has also been recently reported for the haptic perception of slanted surfaces that were explored by dynamic touch by finger tip (Durgin and Li in press). Could this bias function reflect verbal coding itself, rather than perceptual experience? This seems unlikely for two reasons: First, the same function is found whether verbal surface estimates are given relative to horizontal being defined as zero or relative to vertical being defined as zero; for example, a surface of about 34° is judged to be 45° from horizontal, but is also judged to be 45° from vertical (Durgin et al. 2010b, experiment 1). Moreover, even if the task is simply to indicate the bisection point between vertical and horizontal without reference to numbers at all, a surface of about 34° will be estimated as the bisection point using standard psychophysical procedures (Durgin et al. 2010b, experiment 5). Thus, it seems unlikely that this bias function is a verbal bias rather than a perceptual one.
Theories regarding perceptual biases
Why should perception be systematically biased? One possibility is that this is because perceptual representations are constructs derived empirically during successful behaviors (Howe and Purves 2005a; Howe et al. 2006). This theory assumes that percepts do not need to correspond to physical properties, but may instead reflect statistical regularities in the environment. Specifically, the theory proposes that percepts are generated according to the relative frequency of occurrence in past experience. As a result, a Bayesian perceptual system can give rise to perceptual biases and optical illusions (e.g., Howe and Purves 2005b).
More recently, a scale expansion theory was proposed to provide a functional interpretation for the perceptual orientation biases observed across modalities (Durgin 2009; Durgin et al. 2010a, b; Durgin and Li 2011b; Durgin and Li in press; Hajnal et al. 2011; Li and Durgin 2009, 2010; Li et al. 2011). The theory proposes that calibration of motor actions to functional and stable perceptual distortion is useful to improve precision for motor control. The present results support this idea by showing that proprioception of hand orientation is perceptually expanded near horizontal while remaining calibrated to visual experience. Such calibration would seem useful for interaction with surfaces within reach.
The proprioceptive calibration hypothesis
One purpose of the present study was to test whether the performance in hand gesturing to visual slant can be explained by the proprioceptive calibration hypothesis. The calibration idea can be traced back to Helmholtz, who observed that ballistic reaching errors induced by looking through a wedge prism were quickly eliminated with repeated efforts at reaching for objects and that an error in the opposite direction was evident when the prism was removed (von Helmholtz 1867; see also Harris 1963; Held and Freedman 1965). The idea of perceptual calibration (see Lackner and DiZio 2000 for review) indicates that accurate (or efficient) actions do not necessarily require accurate perception, but can be based on correct expectation (see also Powers 1973). As long as the expectation of motor system is consistent with perception, the generated action would be efficient and successful.
According to the calibration hypothesis, similar biases exist in both the visually perceived slant and proprioceptively perceived hand orientation; for example, a physical 45° slant may look like about 60° and a physical 45° hand pitch orientation may also feel like about 60°. When the participant is asked to match his unseen hand to the 45° physical slant, he may physically set his hand to 45° while believing that both the visual slant and his hand pitch are about 60°. To illustrate how well the present data are consistent with the calibration hypothesis, we have re-plotted the manual matching and manual production data of experiment 1 and the visual slant estimation data from Durgin et al. (2010b) in Fig. 8.

Illustration of the actual and predicted manual matching performance upper right (see the main text for detailed explanation), based on numeric estimates of visual and proprioceptive slant
In the upper left quadrant of Fig. 8, physical hand orientation is plotted as a function of proprioceptively perceived hand orientation (i.e., manual orientation production data). In the lower right quadrant, we plot visually perceived slant as a function of physical slant (i.e., verbal estimation data; Durgin et al. 2010b, experiment 1). Each dot on the dashed diagonal line in the lower left quadrant corresponds to a perceptual match between the visually and proprioceptively perceived orientations; that is, assuming proprioceptive matching to visually perceived slant is accomplished by comparing perceptual information, this line should reflect equal perceptions of slant. Using perpendicular projection lines, we have traced the physical hand orientation and the physical visual slant that are perceptually matched in the upper right quadrant. The two physical orientations then predict the performance of the manual gesturing to the visual slant (as shown by the crosses in the upper right quadrant); for example, the dot (60°, 60°) in the lower left quadrant is a perceptual match of perceived 60° orientation. We can trace back to determine that a perceived hand orientation of 60° corresponds to a physical hand orientation of 44°, while a perceived visual slant of 60° corresponds to a physical surface slant of 46°. Thus, the calibration hypothesis would predict that participants would set their hand to about 44° to match a 46° physical slant. To illustrate the extent to which this prediction is consistent with actual performance, the manual gesture data of the elbow group in experiment 1 are plotted in the upper right quadrant as open squares. It is clear that the matching data are fairly consistent with the predictions of the calibration hypothesis.
We emphasize again that the calibration hypothesis does not predict a complete absence of error in action, as we have discussed in the introduction. In Fig. 8, it is evident that although the predicted and the actual manual matching data are fairly consistent with each other, they both deviate from accuracy (i.e., the dashed diagonal line in the upper right quadrant) in a similar manner. The deviation can be as large as 5°. This is acceptable for many manual actions; for example, Durgin et al. (2010a) reported that when their participants were asked to reach out and touch a slanted surface with their palm, the average palm orientation at the time of initial contact deviated about 5° from the physical surface slant. We do emphasize that our data imply the existence of (biased) metric representations. Participants can report on metric representations of visual surfaces and of proprioception, and their reports closely correspond to their matching actions.
The results of experiment 2 further support the calibration hypothesis. The fact that the postural manipulations we tested produced essentially identical effects on manual orientation matching and manual orientation production strongly suggests that both tasks are controlled by normal (consciously available) proprioception. When participants adopted different arm postures during gesturing, changes arose in perceived hand orientation, because hand proprioception may not be well calibrated with unusual postures. Thus, the expectations of the motor system did not match visual experience anymore, and a gesturing error would be expected as we see in experiment 2.
Hand proprioception and arm posture
Systematic perceptual biases in somatosensory system have been reported in many studies (e.g., Darling 1991; Flanders and Soechting 1995; Fuentes and Bastian 2010; Kappers 1999; see Gentaz et al. 2008 for a recent review on biases in haptic perception). The present study contributes to the literature by showing systematic overestimation in perceived hand pitch orientation.
The present finding that hand orientation proprioception is affected by arm posture is consistent with previous studies concerning postural effects on upper limb proprioception. It has been shown that arm posture can affect perceived finger location (Rossetti et al. 1994; van Beers et al. 1998), perceived hand position (Wilson et al. 2010), and perceived elbow angle (Fuentes and Bastian 2010). A plausible account for these posture effects is that hand actions might be associated with optimal arm postures that possess minimal proprioception errors (Rossetti et al. 1994). Indeed, observed arm trajectories and end postures in hand reaching actions are typically quite constrained (Jeannerod 1988) compared with the possible degrees of freedom of arm movement (Cruse and Bruwer 1987). Many hypotheses have been proposed to account for the choice of the end arm posture in hand movements, such as the idea of minimizing total energetic costs (Cruse 1986; Soechting et al. 1995; Rosenbaum et al. 1995), the idea of avoiding extreme joint angles (Cruse and Bruwer 1987), and the idea of minimizing position–signal variability (Rossetti et al. 1994).
In experiment 1, we observed that most participants used proportional flex of their elbow and wrist when spontaneously matching the hand orientation to different slant. The fact that they did not tend to flex only one joint is consistent with the idea of avoiding extreme joint angles (Cruse and Bruwer 1987), because extreme joint angles suffer greater signal variability (Rossetti et al. 1994). The fact that elbow flexion contributed more than wrist flexion, however, seems contrary to the idea of minimizing the energetic costs (Cruse 1986; Soechting et al. 1995; Rosenbaum et al. 1995), because elbow movements are associated with higher costs than wrist movements (Soechting et al. 1995; Wang 1999). Interestingly, the trend to use more elbow than wrist was also observed in spontaneous arm postures during grasping actions (Schot et al. 2010). The relative inaccuracy of matches achieved by participants who spontaneously held their forearm horizontal, however, suggests that deliberately minimizing energetics may come at the cost of poor calibration in this case.
Conclusions
Manual matching of near-surface orientation (pitch) is fairly accurate when the typical spontaneous use of elbow flexion and wrist flexion is observed (i.e., 80% elbow and 20% wrist), but can also be fairly accurate when the flexion of either joint is limited. Limiting joint flexion affects calibration of proprioception and of matching by about the same amount, suggesting that orientation matching tasks depend on proprioception. Certain postures that a minority of participants spontaneously adopt produce poor matches that are probably due to biomechanical limitations of wrist flexion that become relevant when the forearm is not elevated. Thus, postural constraints can strongly or weakly influence manual matching tasks, depending on the nature of the postural constraint. In general, it seems that proprioception of hand orientation is well calibrated with the biased experience of visually perceived orientation of surfaces in reach. This calibration may contribute to the successful control of action with respect to such surfaces.
References
Bingham GP, Pagano CC (1998) The necessity of a perception-action approach to definite distance perception: Monocular distance perception to guide reaching. J Exp Psychol Human 24:145–168
Bingham GP, Zall F, Robin D, Shull JA (2000) Distortions in definite distance and shape perception as measured by reaching with and without haptic feedback. J Exp Psychol Human 26:1436–1460
Bridgeman B, Hoover M (2008) Processing spatial layout by perception and sensorimotor interaction. Q J Exp Psychol 61:851–859
Cruse H (1986) Constraints for joint angle control of the human arm. Biol Cybern 54:125–132
Cruse H, Bruwer M (1987) The human arm as a redundant manipulator: the control of path and joint angles. Biol Cybern 57:137–144
Darling WG (1991) Perception of forearm angles in 3-dimensional space. Exp Brain Res 87:445–456
Dassonville P, Bridgeman B, Bala JK, Thiem P, Sampanes A (2004) The induced Roelofs effect: two visual systems or the shift of a single reference frame? Vision Res 44:603–611
Dick M, Hochstein S (1989) Visual orientation estimation. Percept Psychophys 46:227–234
Durgin FH (2009) When walking makes perception better. Curr Dir Psychol Sci 18:43–47
Durgin FH, Li Z (2011a) The perception of 2D orientation is categorically biased. J Vis 11(8):13 (1–10)
Durgin FH, Li Z (2011b) Perceptual scale expansion: an efficient angular coding strategy for locomotor space. Atten Percept Psychophys 73:1856–1870
Durgin FH, Li Z (in press) Spatial biases and the haptic experience of surface orientation. In El Saddik A (ed) Haptics. InTech
Durgin FH, Hajnal A, Li Z, Tonge N, Stigliani A (2010a) Palm boards are not action measures: an alternative to the two-systems theory of geographical slant perception. Acta Psychol 134:182–197
Durgin FH, Li Z, Hajnal A (2010b) Slant perception in near space is categorically biased: evidence for a vertical tendency. Atten Percept Psychophys 72:1875–1889
Durgin FH, Hajnal A, Li Z, Tonge N, Stigliani A (2011) An imputed dissociation might be an artifact: further evidence for the generalizability of the observations of Durgin et al. 2010. Acta Psychol 138:281–284
Fisher GH (1968) The frameworks for perceptual localization. Technical report No. 70/GEN/9617, University of Newcastle upon Tyne
Flanders M, Soechting JF (1995) Frames of reference for hand orientation. J Cogn Neurosci 7:182–195
Fuentes CT, Bastian AJ (2010) Where is your arm? Variations in proprioception across space and tasks. J Neurophysiol 103:164–171
Gentaz E, Baud-Bovy G, Luyat M (2008) The haptic perception of spatial orientations. Exp Brain Res 187:331–348
Gibson JJ (1979) The ecological approach to visual perception. Houghton Mifflin, Boston
Gibson JJ, Cornsweet J (1952) The perceived slant of visual surfaces-optical and geographical. J Exp Psychol 44:11–15
Goodale MA, Milner AD (1992) Separate visual pathways for perception and action. Trends Neurosci 15:20–25
Haffenden AM, Goodale MA (1998) The effect of pictorial illusion on prehension and perception. J Cogn Neurosci 10:122–136
Hajnal A, Abdul-Malak DT, Durgin FH (2011) The perceptual experience of slope by foot and by finger. J Exp Psychol Human 37:709–719
Harris CS (1963) Adaptation to displaced vision: visual, motor, or proprioceptive change? Science 140:812–813
Held R, Freedman SJ (1965) Plasticity in human sensorimotor control. Science 142:455–462
Howe CQ, Purves D (2005a) Natural-scene geometry predicts the perception of angles and line orientation. Proc Natl Acad Sci USA 102:1228–1233
Howe CQ, Purves D (2005b) The Muller-Lyer illusion explained by the statistics of image-source relationships. Proc Natl Acad Sci USA 102:1234–1239
Howe CQ, Lotto RB, Purves D (2006) Comparison of Bayesian and empirical ranking approaches to visual perception. J Theor Biol 241:866–875
Jastrow J (1892) Studies from the University of Wisconsin: on the judgment of angles and the position of lines. Am J Psychol 5:214–248
Jeannerod M (1988) The neural and behavioural organization of goal directed movements. Oxford University Press, Oxford, p 283
Kappers AML (1999) Large systematic deviations in the haptic perception of parallelity. Perception 28:1001–1012
Lackner JR, DiZio PA (2000) Aspects of body self-calibration. Trends Cogn Sci 4:279–288
Li Z, Durgin FH (2009) Downhill slopes look shallower from the edge. J Vis 9(11):6 (1–15)
Li Z, Durgin FH (2010) Perceived slant of binocularly viewed large-scale surfaces: a common model from explicit and implicit measures. J Vis 10(14):13 (1–16)
Li Z, Durgin FH (2011) Design, data and theory regarding a digital hand inclinometer: a portable device for studying slant perception. Behav Res Methods 43:363–371
Li Z, Phillips J, Durgin FH (2011) The underestimation of egocentric distance: evidence from frontal matching tasks. Atten Percept Psychophys 73:2205–2217
Loomis JM, Da Silva JA, Fujita N, Fukusima SS (1992) Visual space perception and visually guided action. J Exp Psychol Human 18:906–921
McIntyre J, Lipshits M (2008) Central processes amplify and transform anisotropies of the visual system in a test of visual-haptic coordination. J Neurosci 28:1246–1261
Milner AD, Goodale MA (1995) The visual brain in action. Oxford University Press, Oxford
Norman JF, Todd JT, Phillips F (1995) The perception of surface orientation from multiple sources of optical information. Percept Psychophys 57:629–636
Norman JF, Crabtree CE, Bartholomew AN, Ferrell EL (2009) Aging and the perception of slant from optical texture, motion parallax, and binocular disparity. Atten Percept Psychophys 71:116–130
Powers WT (1973) Behavior: the control of perception. Aldine, Chicago
Proffitt DR, Bhalla M, Gossweiler R, Midgett J (1995) Perceiving geographical slant. Psychon B Rev 2:409–428
Rieser JJ, Ashmead DA, Taylor C, Youngquist G (1990) Visual perception and the guidance of locomotion without vision to previously seen targets. Perception 19:675–689
Rosenbaum DA, Loukopoulos LD, Meulenbroek RG, Vaughan J, Engelbrecht SE (1995) Planning reaches by evaluating stored postures. Psychol Rev 102:28–67
Rossetti Y, Meckler C, Prablanc C (1994) Is there an optimal arm posture? Deterioration of finger localization precision and comfort sensation in extreme arm-joint postures. Exp Brain Res 99:131–136
Schot WD, Brenner E, Smeets JB (2010) Posture of the arm when grasping spheres to place them elsewhere. Exp Brain Res 204:163–171
Sedgwick HA (1986) Space perception. In: Boff KR, Kaufman L, Thomas JP (eds) Handbook of perception and human performance. Wiley, New York, pp 21.1–21.57
Smeets JB, Van den Dobbelsteen JJ, De Grave DD, Van Beers RJ, Brenner E (2006) Sensory integration does not lead to sensory calibration. Proc Nat Acad Sci USA 103:18781–18786
Soechting JF, Buneo CA, Herrmann U, Flanders M (1995) Moving effortlessly in three dimensions: does Donders’ law apply to arm movement? J Neurosci 15:6271–6280
Todd JT, Thaler L, Dijkstra TM (2005) The effects of field of view on the perception of 3D slant from texture. Vision Res 45:1501–1517
van Beers RJ, Sittig AC, Denier van der Gon JJ (1998) The precision of proprioceptive position sense. Exp Brain Res 122:367–377
Von Helmholtz H (1867) Handbuch der physiologischen Optik, vol 1. Voss, Lelpzig, pp 601–602
Wang X (1999) Three-dimensional kinematic analysis of influence of hand orientation and joint limits on the control of arm postures and movements. Biol Cybern 80:449–463
Wilson ET, Wong J, Gribble PL (2010) Mapping proprioception across a 2D horizontal workspace. PLoS ONE 5(7):e11851
Wundt W (1862) Beiträge zur Theorie der Sinneswahrnehmung. Winter’sche Verlagshandlung, Leipzig
Acknowledgments
This research was supported by Award Number R15 EY021026-01 from the National Eye Institute. The content is solely the responsibility of the authors and does not necessarily represent the official views of the National Eye Institute or the National Institutes of Health.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Li, Z., Durgin, F.H. Manual matching of perceived surface orientation is affected by arm posture: evidence of calibration between proprioception and visual experience in near space. Exp Brain Res 216, 299–309 (2012). https://doi.org/10.1007/s00221-011-2934-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-011-2934-2