
Abstract
In the absence of visual feedback, the perceived position of the hands is systematically biased towards the plausible manual task space. Here we tested whether perceived orientation of the finger is similarly misperceived in right-handed individuals. Participants’ index fingers were passively rotated about the middle joint to a range of test angles, either in the frontoparallel plane (Experiment 1) or the horizontal plane (Experiment 2); they reported perceived orientation of the finger by rotating a visual line presented on a screen optically superimposed on the location of their unseen finger. Perceived finger orientations were biased towards positions that varied across hands and planes. Both hands were biased towards 10° inward in the frontoparallel plane and, in the horizontal plane, the left hand was biased towards 25° inward, whereas the right hand was biased towards 2° inwards. In a third experiment, participants reported finger orientation with respect to non-visual targets: gravitational vertical or straight ahead. Biases in perceived finger orientation to non-visual targets were similar to those found in the visual line task. The asymmetrical nature of biases across hands and planes reflects the typical orientation of the hands while working and supports the theory of a functional rather than anatomical representation of the fingers and hands in space.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Knowledge of our hands’ positions in space is vital for everyday tasks, yet in the absence of visual feedback we systematically misjudge their position and size (Ghilardi et al. 1995; Vindras et al. 1998; Haggard et al. 2000; Jones et al. 2010). The perceived position of the hand can be measured as its reported location, i.e., its three-dimensional position in space—however, a critical and rather under-considered aspect of hand perception is its perceived orientation. Here we investigated whether perceived finger orientation is also systematically misperceived. To measure this, we tested perceived orientation of the index finger after it was rotated around its second joint in either the frontoparallel or horizontal planes. We used a visual probe (Experiments 1 and 2) and a non-visual probe (Experiment 3) to determine perceptual biases.
Biases in perceived hand location
Pointing and reaching without visual feedback produces systemic positional errors that have been attributed to a misperception of initial hand position. These errors are greatly reduced if participants are given visual feedback about the initial position of their hand immediately before making the movement (Vindras et al. 1998). Haggard et al. (2000) positioned participants’ hands above or below locations on a table, palm facing up, and asked them to point to the location of their hand on the other side of the table with their other hand. Overall, they found that the right hand was perceived as translated towards the right shoulder and rotated clockwise from actual, while the left hand was perceived as translated towards the left shoulder and rotated counterclockwise. They suggested that the rotational component could reflect a bias towards what they called the “main axis of movement” of the hands. Schmidt and colleagues tested arm position sense by rotating participants’ arms about the elbow in the horizontal plane; similar to Haggard and colleagues, they reported that arm location was biased towards the body (Schmidt et al. 2013a). However, in their study only right-handers showed this bias while left-handers did not.
The proposed “main axis” of the hands, at which participants appear to be most accurate and precise, seems to be driven by functional rather than biomechanical plausibility. In a reaching task, Ghilardi and colleagues showed that perceived initial hand position was biased towards a specific region of positions, which they argue reflected the “functional workspace for the hand”. Importantly, this area of increased accuracy shifted after a training task that altered participants’ perceived task space (Ghilardi et al 1995). If biases in perceived hand position were driven by biomechanical factors, such as a systemic underestimation of muscle flexion/extension, we would predict distortions would be unaffected by training.
Aims of the current study
Previous studies of perceived hand location have used tasks in which the hand was extended in the horizontal plane, ignoring other possible planes of hand operation (e.g., frontoparallel). It remains to be seen whether errors in hand perception persist when the hand is held in plane other than the horizontal one. Furthermore, they did not directly measure perceived orientation of the hand. Orientation is a vital component of hand perception as it helps us construct a sense of hand posture, which is relevant to manual dexterity. A model of how we represent our hands in space must take perceived orientation into account.
Kappers and colleagues tested haptically perceived parallel across a range of hand positions with respect to the body midline. Haptic estimates of parallelity require an internal estimate of both the position and orientation of the hand, and as such are an indirect measure of perceived hand orientation. The researchers found large biases in participants’ parallelity estimates, which were best described by a model with a hand-centric source of error, the magnitude of which could vary across individuals (Kappers 1999; Kappers and Viergever 2006; Volcic and Kappers 2008). These findings suggest errors in the perceived orientation of the hand may exist in addition to errors in perceived hand position.
Our hypothesis was that perceived finger orientation would exhibit a rotational bias towards an orientation that reflected the most functional use of the hands. Furthermore, given that function appears to drive the relevant task space (Ghilardi et al. 1995) and the functional use of the hands varies between the left and right hands in right-handers (e.g., writing versus stabilizing the writing surface), we anticipated that the “main orientation” might be different for each hand.
We measured perceived orientation of the left and right index fingers in right-handers for a range of orientations in the frontoparallel (Experiment 1) and horizontal (Experiment 2) planes, as a probe of perceived hand orientation. In these experiments, we used a visual line to probe perceived orientation. In a third experiment, we measured perceived finger orientation relative to an externally defined reference: either “gravity vertical” or “straight ahead”, in order to confirm that orientation errors were proprioception based and not a function of the visual probe used in the first two experiments.
General methods
Participants
All participants were faculty, undergraduate, and graduates students at York University, recruited by word of mouth. Participants did not receive compensation for their participation. All participants had normal or corrected-to-normal visual acuity and reported no history of dizziness or balance disorders. Experiments were approved by the ethics board of York University and were run according to the principles outlined in the Declaration of Helsinki (1964). Details of participants in each experiment are reported below.
Apparatus
Participants were seated at a table with the test apparatus in front of them. The apparatus consisted of a metal frame on which was mounted a motor, a mirror, and a monitor (Fig. 1). The motor (Applied Motion Products 23Q-3AE Integrated Stepper Motor, 20,000 steps per revolution) was mounted either 48 cm above the surface of a table, such that the shaft of the motor was roughly at eye level and 45 cm directly in front of them, with the shaft pointing towards them (“frontoparallel” configuration, see Fig. 1a), or in front of them on the surface of the table 35 cm away with the shaft of the motor 15 cm above the surface of the table pointing straight up (“horizontal” configuration, see Fig. 1b). A metal fastener held a 5-cm wooden dowel orthogonal to the shaft of the motor. During the experiment, the participant’s index finger was fixed along this dowel with two pieces of flexible wire, so that the axis of rotation of the motor was aligned with the second joint of the finger. Their arm was positioned comfortably in a natural configuration such that the hand could be held directly in front of the body. In the frontoparallel configuration, an elbow rest was provided for support. The motor was connected via a serial port to a laptop; a MATLAB program was used to send real-time commands to the motor, which rotated the shaft, thus passively rotating the participant’s finger. The motor had a precision of 0.02° and emitted minimal noise while changing position, which did not give any indication of direction of movement. The motor was programmed to accelerate/decelerate at a rate of 0.5 revolutions/s2 to or from a preset velocity of 0.5 revolutions/s. The participant’s elbow was not fixed, meaning they could move their arm to accommodate the motion of their finger if necessary. In the frontoparallel configuration (Fig. 1a), a small cardboard box was provided to support the elbow for comfort.

A schematic of the apparatus in profile. Participants were seated with their index finger affixed to a dowel orthogonally attached to the motor’s shaft. A mirror reflected the monitor so that images were optically superimposed on their hand. a Frontoparallel configuration (Experiment 1 and 3): the participant’s hand was positioned with the index finger perpendicular to the table at eye level. b Horizontal configuration (Experiment 2 and 3): the participant’s hand was positioned with the index finger parallel to the surface of the table
In the frontoparallel configuration, the mirror was mounted at a tilt of 45° in front of the motor such that it optically superimposed the monitor on their unseen finger. In the horizontal configuration, the mirror was mounted horizontally above the motor equidistant between the dowel and the monitor so that the screen was again optically superimposed over the participant’s finger.
Convention
0° is defined as upright (frontoparallel) or straight ahead (horizontal). Positive values indicate a rotation of the hand inward (towards the radius bone); negative values indicate an outward rotation (towards the ulnar bone). Note that this means a positive/inward rotation of the right hand is counterclockwise, but a positive/inward rotation of the left hand is clockwise from the perspective of the participant (see Fig. 2).

Convention for indicating the orientation of both hands. Positive angles indicate a rotation of the hand inwards/towards the radius; negative values indicate an outward rotation towards the ulnar
Experiment 1: perceived finger orientation in the frontoparallel plane using a visual line
Methods
Participants
Twelve participants (9 female, aged 19–53) completed this experiment. All self identified as right handed.
Procedure
Participants were seated in a dark room with the index finger of one hand attached to the test apparatus in the frontoparallel configuration (Fig. 1a). On a given trial, the test program randomly selected one of five test orientations (−10°, −5°, 0°, +5° and +10°). After a 7-s delay, the motor moved through a sequence of three initial positions, randomly sampled from a normal distribution with the mean at the test orientation, with a standard deviation of 10°. This was done in order to mitigate potential effects of hysteresis when moving from one test orientation to the next (Schöne and Lechner-Steinleitner 1978). As each of the initial positions was reached, the motor paused for one second before moving to the next position. After this “wiggle” through the three initial orientations, the motor moved to the final test orientation. There was then a one-second delay before a white bar appeared on the screen (0.7° × 0.2°) optically superimposed on the participant’s unseen finger with an initial orientation of 0°. Participants then used their free hand to operate the left and right arrow keys on a keyboard to rotate the bar until it was perceived to align with their unseen finger. Participants submitted their response by pressing the down arrow and the next trial began immediately. Each of the five test orientations was presented 10 times, leading to 50 trials total per hand, which took roughly 20 min to complete. Left and right hands were tested in random order.
Data analysis
The average response for each test orientation was calculated as the average of the participant’s ten adjustments. Responses outside ± 2 standard deviations of the participant’s mean adjustment for that position were removed (of the 1200 trials in the experiment, 57 or less than 5 % were removed). The average signed error at each orientation was calculated by subtracting the average reported orientation from the test orientation. The precision at each orientation was calculated as the standard deviation of the participant’s adjustments at that orientation.
Two 2 × 5 ANOVAs were used to assess the effects of hand (right or left) and angle (−10°, −5°, 0°, +5° and +10°) on the accuracy (mean signed error) and precision of the settings, respectively. Data that violated assumptions of sphericity according to Mauchly’s test were subjected to Greenhouse–Geisser correction, and modified degrees of freedom are reported. In addition, 5 two-tailed independent t tests were conducted on the mean signed error at each test position for each hand to determine whether error was significantly different from 0 (i.e., accurate). The false discovery rate for the 5 tests/hand was controlled for using the Holm–Bonferroni step-down procedure and an overall alpha of 0.05.
Results for Experiment 1
Accuracy
The average signed error and mean perceived finger orientation at each test orientation is shown for the left and right hands in Fig. 3a and c respectively. Mean signed error and standard error for each tested angle are reported in Table 1.

Top row perceived orientation of the hands in the frontoparallel (a) and horizontal planes (b) over a range of test orientations. The blue lines indicate the mean signed error for the left hand, and the purple for the right. Dashed lines denote the orientation at which participants were most accurate. Results are shown in polar coordinates in c and d, respectively, in the middle two rows. Black lines indicate the actual orientations of the hand, while red lines indicate perceived orientation. Bottom row mean within-subject precision of orientation judgments for the left (blue) and right (purple) hands in the frontoparallel (e) and horizontal planes (f). Error bars are standard error. Note horizontal axes are different for the horizontal and frontoparallel line graphs
A 2 × 5 ANOVA found a significant main effect of angle, F(1.60, 17.62) = 47.15, p < 0.001. That is, accuracy of the perceived position of both right and left index fingers varied as a function of test angle. No other effects were significant. t tests found that the three outermost (negative) angles were significantly biased inwards for the left hand: t(11) = 6.36, p corrected < 0.001 (−10°); t(11) = 4.24, p corrected = 0.004 (−5°); and t(11) = 3.07, p corrected = 0.018 (0°). The two outermost angles were also significantly biased inwards for the right hand: t(11) = 5.59, p corrected < 0.001 (−10°) and t(11) = 3.00, p corrected = 0.012 (−5°) (see Table 1).
Precision of responses
The average precision for left and right index fingers at each of the test orientations in the frontoparallel plane is shown in Fig. 3e. A 2 × 5 ANOVA found a significant main effect of test angle, F(4, 44) = 4.02, p = 0.007. Precision was best at test angles between 0° and −5°.
Discussion of Experiment 1
The aim of Experiment 1 was to identify how accurately and precisely participants know the orientation of their left and right index fingers in the frontoparallel plane in the absence of visual information. At outward orientations, both hands were perceived less precisely and less accurately than at orientations close to 5° inwards. We interpret these axes of least error as corresponding to the main axis or primary functional orientation of the hands.
In Experiment 2, we tested whether these rotational biases were preserved when the hand was pronated in the horizontal plane (i.e., palm facing down). We used a wider range of test angles (−10° to 30° in 10° steps) than used in Experiment 1 in an attempt to better capture the overall nature of finger orientation biases in this plane.
Experiment 2: perceived finger orientation in the horizontal plane using a visual line
Methods
Participants
Seventeen participants (13 female, aged 21–62) completed this experiment. Participants were right-handed as identified by a score of 55 or higher on the Edinburgh Handedness Inventory (Oldfield 1971; Cohen 2008). One female participant scored 20 on this inventory (within the middle decile) and was thus deemed ambidextrous; her data were removed from subsequent analysis.
Procedure
Participants were seated in a dark room with their index finger attached to the apparatus in the horizontal configuration (Fig. 1b). On a given trial, the test program randomly selected one of five test orientations (−10°, 0°, 10°, 20° and 30°). Immediately after the trial began, the motor moved through a sequence of three initial positions chosen according to the same criteria and method as Experiment 1, before moving to a final test orientation at which point the white bar appeared on the horizontal mirror. The bar appeared at an orientation randomly selected from within the range of −10° to 30°. Participants used their free hand to click buttons on a mouse to rotate the bar until it was perceived to align with their unseen finger. They then clicked the middle mouse button to submit their response. After their response, the next trial began immediately. Each of the five test orientations was presented 10 times, leading to 50 trials per condition. Right and left hands were tested in random order.
Data analysis
Mean signed error and precision for each test orientation were calculated and analysed in the same way as in Experiment 1.
Results for Experiment 2
Accuracy
The average signed error and mean perceived finger orientation at each of the test orientations is shown for the left and right hands in Fig. 3b and d respectively. Mean signed error and standard error for each tested angle are reported in Table 1.
A 2 × 5 ANOVA found a significant main effect of hand, F(1, 15) = 8.60, p = 0.010, and a main effect of angle F(1.87, 28.04) = 4.11, p = 0.029. There was a significant hand*angle interaction, F(4, 60) = 2.55, p = 0.049; that is, mean signed error varied as a function of both hand and angle, and varied differently for each hand as a function of angle. t tests found that the three outermost angles were significantly biased inwards for the left hand: t(15) = 5.06, p corrected < 0.001 (−10°); t(15) = 2.89, p corrected = 0.033 (0°); and t(15) = 3.61, p corrected = 0.012 (10°). Responses were not significantly biased for the right hand (see Table 1).
Precision
The average precision for left and right fingers at each test orientations is shown in Fig. 3f. A 2 × 5 ANOVA found no significant effects.
Discussion of Experiment 2
The goal of Experiment 2 was to extend the results of Experiment 1 into the horizontal plane. That is, we wanted to determine whether there was a consistent axis towards which perceived finger orientation was biased. We found that for the left hand a rotational bias towards ~25° inwards was present. This is inconsistent with the data from Experiment 1, where the rotation bias was towards an angle at ~5° inwards. Thus, if a functional task axis exists for the left hand, it varies in different planes. This is perhaps not surprising, given the unique role of the left hand when pronated in the horizontal plane (stabilizing paper, typing, holding food while chopping), compared to its function in the frontoparallel plane (wiping walls, holding a nail for hammering, etc.).
As is evident when comparing precision data across Experiments 1 and 2 (Fig. 3e, f), this experiment was a much more difficult task than Experiment 1, and there was a great deal of variability in performance across subjects. It is apparent that the right hand is (a) more accurately perceived (though not necessarily more precisely) compared to the left hand in right-handers and (b) not significantly different from accurate across a broad range of orientations in the horizontal plane. This broader range of accurate orientations might reflect individual a broader functional task space for the right hand in this plane.
To confirm that these biases were due to proprioceptive errors and not artefacts of the proprioceptive–visual response methodology, we repeated the orientation judgment task using a non-visual probe. In Experiment 3, participants kept their eyes closed and reported perceived orientation of the left and right index fingers with respect to gravity vertical (frontoparallel plane) and straight ahead (horizontal plane). We predicted that errors in perceived finger position would reflect the orientation judgment errors in Experiments 1 and 2. That is, we anticipated participants would perceive their left and right index fingers to be aligned with gravity vertical when they were rotated ~5° outwards (indicating participants perception that their index finger is rotated ~5° inwards from its actual position as suggested by Experiment 1). For the horizontal plane, we expected this error to be in the realm of ~20° outwards for the left index finger (as suggested by Experiment 2), and accurate for the right index finger.
Experiment 3: perceived finger orientation relative to gravity and straight ahead
Methods
Participants
Seventeen participants (10 female, aged 19–61) completed this experiment. All participants reported right-hand dominance, normal or corrected-to-normal visual acuity, and no history of balance disorders. Eight of the participants completed both of the plane conditions in this experiment; however, we were unable to test the remaining four participants in the second condition and recruited four new individuals. Thus, we used a between-subjects analysis as it is more conservative in estimating the variance caused by subject differences across conditions.
Apparatus
In the frontoparallel plane condition, the test apparatus was used in the configuration as shown in Fig. 1a; in the horizontal plane condition, it was used in the configuration as shown in Fig. 1b.
Procedure
The procedure for this experiment was similar to that of the previous two experiments. Participants were again seated in the dark in front of the apparatus with their index fingers strapped to the dowel, but with instructions to keep their eyes closed. At the start of each trial, a test orientation was chosen by an adaptive staircase algorithm (QUEST; Watson and Pelli 1983). The motor then moved through three initial test orientations (chosen in the same manner as Experiments 1 and 2) before reaching the test orientation. There was a one-second delay followed by a beep (400 Hz, 0.2 s in duration). In the frontoparallel condition, participants were asked to report whether their hand was pointing to the left or right of gravitational up (i.e., “the direction a brick would fall”) using a keypad with their free hand. In the horizontal condition, participants were asked to report if their hand was pointing left or right of straight ahead. The QUEST algorithm used their response to update its estimate of the participant’s point of subjective equality (PSE), i.e., where “left” and “right” responses were equally likely. This estimate then became the test position for the following trial.
For all conditions, the QUEST was initialized with a PSE of 0°, a liberal standard deviation of 10°, and a grain of 0.1°. The QUEST ran for 30 trials per block; blocks took approximately 7 min to complete. Right and left hands were tested in random order. The frontoparallel testing sessions took place roughly a year before the horizontal sessions.
Data analysis
The final estimate of the QUEST for the participant’s PSE was used as their perceived direction of gravity vertical or straight ahead. If we assume that the internal estimate of the target angle (gravity or straight ahead) is on average accurate (and it likely is, at least in healthy individuals positioned upright; see Bauermeister et al. 1964; Mao et al. 2002; Fraser et al. 2015), then a systematic bias in responses would indicate a misperception of hand’s alignment with that angle. A negative bias would indicate that the hand was perceived as rotated further inwards than actual, whereas a positive bias would mean the reverse. A 2 × 2 mixed model ANOVA compared the effect of hand (left or right) and plane (frontoparallel or horizontal) on perceived alignment with the target (“Gravity” or “Straight Ahead”). The ANOVA treated the plane as a between-subjects factor, due to the number of participants who only completed one of the two conditions. In addition, 4 two-tailed independent t tests compared mean biases in each condition to 0° (accurate) to determine whether the response was significantly biased. The false discovery rate for two tests on either hand was controlled for using the Holm–Bonferroni step-down procedure.
Results of Experiment 3
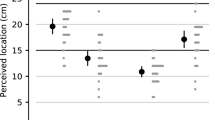
The mean PSEs for participants for each hand for each condition are shown in Fig. 4. Asterisks indicate a PSE significantly biased from accurate. A 2 × 2 ANOVA found a significant main effect of hand (left or right), F(1, 22) = 21.02, p < 0.001. No other effects were significant. t tests comparing the left finger PSEs to 0° (accurate) found significant differences, t(11) = −4.53, p corrected = 0.001 (frontoparallel) and t(11) = −5.06, p corrected < 0.001 (horizontal).

Mean PSEs for the left and right hand when aligning with gravity (frontoparallel) or straight ahead (horizontal). Error bars are standard error. Asterisks indicate mean PSE was significantly different from 0° (accurate)
Discussion of Experiment 3
In this experiment, we sought to confirm the perceived finger orientation biases observed in Experiments 1 and 2 using a non-visual orientation judgment. That is, based on the results of Experiment 1, we expected the right hand to be perceived as slightly shifted inward (~5°) compared to actual in the frontoparallel plane, leading to a PSE that was slightly biased outwards. In the horizontal plane, we expected the left hand to be significantly shifted inward (~20°), indicated by a PSE biased outwards, while the right hand may be accurate. These would be reflected in outward biases of the perceived vertical or perceived straight ahead (indicating the orientation of the hand was judged more inwards than it actually was). These hypotheses rely on the assumption that the participant initially accurately perceives the non-visual targets. There is some support for this assumption for gravity vertical, at least while the participant is upright (Bauermeister et al. 1964; Fraser et al. 2015). Evidence suggests pointing straight ahead may be accurate as well for either hand when the arm is positioned close to parallel with the body midline (Chokron et al. 2004), although the specific hand configuration we used was not tested.
Perception of the right hand was not significantly biased in either non-visual direction, which was consistent with our prediction for the horizontal plane although the general rotational bias towards ~5° inwards we hypothesized in the frontoparallel plane was not evident. This latter finding is unsurprising given we did not find a significant bias in reported orientation when the finger was aligned with gravity vertical in Experiment 1, i.e., when it was at the 0° position (see Table 1). Given how close this angle is to 5° already, it may be that we simply did not have the statistical power to detect a bias in this test position. The findings of Experiment 3 suggest perceived right index finger orientation may be accurate when pointing either straight up or straight ahead. In contrast, perceived left index finger orientation was significantly biased in both planes, consistent with our findings from previous experiments, though the bias in the horizontal plane was more moderate than anticipated. Importantly, the biases in perceived orientation with respect to the non-visual targets were asymmetrical for both hands, reflecting a non-biomechanical explanation for perceived orientation errors. Furthermore, these data confirm that perceived orientation errors are truly proprioceptive in nature, as they persist even in non-visual orientation judgment tasks.
General discussion
Our results show that the perceived orientations of the right and left index fingers are biased towards a certain range of orientations that systematically vary by with hand and plane of operation. This bias appears to be proprioceptive in nature, as it persists when perceived orientation is probed with visual and non-visual response methods.
In the frontoparallel plane, perceived orientation of the left and right fingers was biased towards an orientation rotated roughly 5° inward from upright; in the horizontal position, the left finger was biased towards an orientation rotated closer to 20°–25° inward from straight ahead, while perceived orientation was accurate across a broad range of positions for the right finger. While these positions reflect biomechanically comfortable orientations of the hands given the range of motion of the wrists and elbows, the fact that the axes are asymmetrical for both hands suggests a functional rather than anatomical bias in perceived orientation, that is, a bias towards typical functional orientations of the hand like those shown in Fig. 5. We interpret our data as agreeing with the notion of a “functional rather than absolute representation of the perceived position of the hand in egocentric space” which Haggard et al. (2000, p. 371) used in reference to localization of the hand.

Typical functional orientations for the left and right in the frontoparallel (left) and horizontal (right) planes
A function-based representation of the hands
A number of researchers have suggested that perception of the upper limbs is biased towards a local workspace (Ghilardi et al. 1995; Haggard et al. 2000). For example, following learning a manual motor task participants’ bias in the proprioceptive location of the hands was shifted in the direction of the new task space (Ghilardi et al. 1995). It could be that repeated skilled work within a local workspace may improve perception of hand position in these regions and bias perception of more extreme/uncertain hand positions towards them, in a manner similar to a sensory prior. A prior is the brain’s best guess, in the absence of reliable sensory feedback about a value: for example, the orientation of the perceptual upright reverts towards the long-axis of the body in the absence of other cues (Mittelstaedt 1983). Here we postulate a prior for perceived hand position that then influences the interpretation of other sensory information (Rohde et al. 2016; Gau and Noppeney 2016).
In right-handed individuals, there is likely a specialization of hand function that differs in the dominant and non-dominant hands (Goble and Brown 2008b) resulting from different functional workspaces for the left and right hand. This would predict that biases in perceived finger orientation and finger position might not be symmetrical in the two hands—which our data support.
Precision differences between hands
We found no differences in precision of orientation estimates across the two hands in our tasks. This is consistent with previous research that found no difference in precision between the localization of the two hands (Jones et al. 2010), although that study measured perceived location, not orientation, so the comparison may not be justified. Other studies have suggested a left-limb advantage in processing proprioceptive feedback, based on the finding that the left hand more accurately reproduces a right-hand configuration than vice versa (Goble and Brown 2007, 2008a). It has been argued that the non-dominant or non-preferred hand may be specialized for increased precision in position sense, while the preferred hand is more precise in motor movements (Goble and Brown 2008b). The rationale behind this theory is that in bimanual tasks, the non-dominant hand is often used to hold or maintain an object’s position while the dominant hand engages in motor movements (e.g., sewing, hammering a nail), thus supporting a specialization of limb perception. Our data do not support this theory, although a lack of significant findings must be interpreted carefully.
Conclusion
We measured perceived orientation of the index finger. This kind of rotation may not be naturalistic, or generalizable to the rest of the hand. Nevertheless, perceived orientation of the individual components of the hands provides clues to overall hand perception, which must include rotation as well as translation and size components. All three of these components appear to be biased in some way (e.g., Ghilardi et al. 1995; Vindras et al. 1998; Longo and Haggard 2012; Schmidt et al. 2013b), and together with this literature, our results suggest that, at least for right-handed individuals, conscious representation of the hands is biased towards the functional roles the hands play in everyday life.
References
Bauermeister M, Werner H, Wapner S (1964) The effect of body tilt on tactual-kinesthetic perception of verticality. Am J Psychol 77:451–456
Chokron S, Colliot P, Atzeni T et al (2004) Active versus passive proprioceptive straight-ahead pointing in normal subjects. Brain Cognit 55:290–294. doi:10.1016/j.bandc.2004.02.015
Cohen MS (2008) Handedness questionnaire. http://www.brainmapping.org/shared/Edinburgh.php. Accessed 20 June 2002
Fraser LE, Makooie B, Harris LR (2015) The subjective visual vertical and the subjective haptic vertical access different gravity estimates. PLoS One 10:e0145528. doi:10.1371/journal.pone.0145528
Gau R, Noppeney U (2016) How prior expectations shape multisensory perception. Neuroimage 124:876–886
Ghilardi MF, Gordon J, Ghez C (1995) Learning a visuomotor transformation in a local area of work space produces directional biases in other areas. J Neurophysiol 73:2535–2539
Goble DJ, Brown SH (2007) Task-dependent asymmetries in the utilization of proprioceptive feedback for goal-directed movement. Exp Brain Res 180:693–704. doi:10.1007/s00221-007-0890-7
Goble DJ, Brown SH (2008a) Upper limb asymmetries in the matching of proprioceptive versus visual targets. J Neurophysiol 99:3063–3074. doi:10.1152/jn.90259.2008
Goble DJ, Brown SH (2008b) The biological and behavioral basis of upper limb asymmetries in sensorimotor performance. Neurosci Biobehav Rev 32:598–610. doi:10.1016/j.neubiorev.2007.10.006
Haggard P, Newman C, Blundell J, Andrew H (2000) The perceived position of the hand in space. Percept Psychophys 62:363–377. doi:10.3758/BF03205556
Jones SAH, Cressman EK, Henriques DYP (2010) Proprioceptive localization of the left and right hands. Exp Brain Res 204:373–383. doi:10.1007/s00221-009-2079-8
Kappers AML (1999) Large systematic deviations in the haptic perception of parallelity. Perception 28:1001–1012. doi:10.1068/p2802
Kappers AML, Viergever RF (2006) Hand orientation is insufficiently compensated for in haptic spatial perception. Exp Brain Res 173:407–414. doi:10.1007/s00221-006-0377-y
Longo MR, Haggard P (2012) A 2.5-D representation of the human hand. J Exp Psychol Hum Percept Perform 38:9–13
Mao HF, Hsueh IP, Tang PF et al (2002) Analysis and comparison of the psychometric properties of three balance measures for stroke patients. Stroke 33:1022–1027. doi:10.1161/01.STR.0000012516.63191.C5
Mittelstaedt H (1983) A new solution to the problem of the subjective vertical. Naturwissenschaften 70:272–281
Oldfield RC (1971) The assessment and analysis of handedness: the Edinburgh inventory. Neuropsychologia 9:97–113
Rohde M, van Dam LCJ, Ernst MO (2016) Statistically optimal multisensory cue integration: a practical tutorial. Multisensory Res 29:279–317
Schmidt L, Artinger F, Stumpf O, Kerkhoff G (2013a) Differential effects of galvanic vestibular stimulation on arm position sense in right- versus left-handers. Neuropsychologia 51:893–899. doi:10.1016/j.neuropsychologia.2013.02.013
Schmidt L, Keller I, Utz KS et al (2013b) Galvanic vestibular stimulation improves arm position sense in spatial neglect: a Sham-stimulation-controlled study. Neurorehabil Neural Repair 27:497–506. doi:10.1177/1545968312474117
Schöne H, Lechner-Steinleitner S (1978) The effect of preceding tilt on the perceived vertical: hysteresis in perception of the vertical. Acta Otolaryngol 85:68–73
Vindras P, Desmurget M, Prablanc C, Viviani P (1998) Pointing errors reflect biases in the perception of the initial hand position. J Neurophysiol 79:3290–3294
Volcic R, Kappers AML (2008) Allocentric and egocentric reference frames in the processing of three-dimensional haptic space. Exp Brain Res 188:199–213. doi:10.1007/s00221-008-1353-5
Watson AB, Pelli DG (1983) QUEST: a Bayesian adaptive psychometric method. Percept Psychophys 33:113–120. doi:10.3758/BF03202828
Acknowledgments
This research was supported by a Discovery grant from the Natural Sciences and Engineering Research Council (NSERC) of Canada. LF is supported by an Ontario Graduate Scholarship and an NSERC CREATE grant.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no conflict of interest in this work.
Rights and permissions
About this article

Cite this article
Fraser, L.E., Harris, L.R. Perceived finger orientation is biased towards functional task spaces. Exp Brain Res 234, 3565–3574 (2016). https://doi.org/10.1007/s00221-016-4752-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-016-4752-z