
Abstract
We have recently shown that in an unsupported forearm-matching task blindfolded human subjects are able to achieve an accuracy of 2–3°. If one arm was exercised to produce significant fatigue and the matching task was repeated, it led subjects to make position-matching errors. Here that result is confirmed using fatigue from a simple weight-lifting exercise. A 30% drop in maximum voluntary force after the exercise was accompanied by a significant matching error of 1.7° in the direction of extension when the reference arm had been fatigued, and 1.9° in the direction of flexion when the indicator arm had been fatigued. We also tested the effect of fatigue on a simple movement tracking task where the reference forearm was moved into extension at a range of speeds from 10 to 50°s−1. Fatigue was found not to significantly reduce the movement-tracking accuracy. In a second experiment, movement tracking was measured while one arm was vibrated. When it was the reference arm, the subject perceived the movement to be significantly faster (3.7°s−1) than it actually was. When it was the indicator, it was perceived to be slower (4.6°s−1). The data supports the view that muscle spindles are responsible for the sense of movement, and that this sense is not prone to the disturbance from fatigue. By contrast, the sense of position can be disturbed by muscle fatigue. It is postulated, that the sense of effort experienced by holding the arm against the force of gravity is able to provide information about the position in space of the limb and that the increased effort from fatigue produces positional errors.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
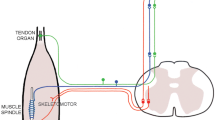
An important subject of study for sensory neuroscience during the last half-century has been the contribution of muscle receptors, specifically muscle spindles and tendon organs, to motor control. In recent years, it has emerged that muscle receptors appear to be involved in two quite different roles. Much evidence has been acquired to show that they contribute to the automatic, unconscious control of posture and movement. Muscle afferents participate in phase- and task-dependent reflexes and their incoming signals are matched to the commands from the central pattern-generators, to achieve the desired movements. For a review, see Lam and Pearson (2002).
The second, major role of muscle receptors is in conscious sensation, specifically, kinaesthesia, the sense of position and movement of our limbs. For a review, see Gandevia (1996). Our view of the role of muscle receptors has vacillated over the years, and at times, the importance of joint and skin inputs have been emphasised (Skoglund 1973; Collins et al. 2005). It was the experiments of Goodwin et al. (1972) that provided evidence in support of muscle spindles as position and movement sensors. See also Eklund (1972).
It is worthwhile to re-examine those experiments and to be reminded of the views of the authors, specifically in relation to the sense of position. Goodwin et al. (1972) commented that in a forearm position-matching task, when one arm “was held by the experimenter without the need for the subject to exert himself”, position errors were large, as much as 15°. This contrasts with an accuracy of 2–3° when the unsupported arm is held by the subject himself (Paillard and Brouchon 1968; Walsh et al. 2004). In addition, Goodwin et al. (1972) commented that “these inaccuracies in the absolute sense of position contrast with the accuracy with which movements away from a predetermined position can be detected; a movement of the elbow of 1–2° can be reliably detected” (See also Wise et al. 1998).
The general impression from the work of Goodwin et al. (1972) is that vibration of a muscle produces predominantly an illusion of movement, although a small, but significant distortion of absolute sense of position occurs as well. Given the poor positional acuity during placement of a passive limb, it raises the possibility that muscle spindles are primarily movement detectors and are less important for the sense of position.
We have entered this debate coming from quite a different direction. It has repeatedly been shown that after periods of intense exercise, there is a disturbance to proprioception. See, for example, Saxton et al. (1995) and Brockett et al. (1997). In two recent experiments, we have shown that fatigue from exercise produces errors in a force-matching task (Weerakkody et al. 2003) and a position-matching task (Walsh et al. 2004).
The influence of fatigue on the sense of position has been studied before. Skinner et al. (1986) showed that a subject’s ability to reproduce a given knee angle deteriorated after fatiguing exercise (running and sprinting). Interestingly, there was no effect of fatigue on movement-detection thresholds. Sharpe and Miles (1993) fatigued elbow flexors of one arm and found no reciprocal effects, that is, errors in a direction dependent on whether the indicator or reference had been fatigued. Finally, Marks and Quinney (1993) showed that after a fatiguing bout of exercise of the quadriceps muscle, there was no change in the subject’s ability to reproduce a given knee angle. Putting all of this together, it remained uncertain whether or not fatigue altered the sense of position.
Our working hypothesis was somewhat different from that employed by other investigators. We had shown previously that fatigue from exercise did not disturb the responsiveness of muscle receptors (Gregory et al. 2002, 2004). We had come to the conclusion that fatigue was exerting its effect on the sense of position, not through muscle receptors, but by altering the amount of effort required to maintain the position of a limb (Walsh et al. 2004).
If the sense of effort is an important source of positional information, it raises the question, is effort involved in the sense of movement, as well? Here we report for a forearm position-matching task that matching accuracy is disturbed by a period of concentric exercise, but a similar disturbance does not seem to be present for a movement-tracking task.
Methods
Fifteen healthy subjects (eight males, seven females), who were not involved in any regular training programme, were recruited for the study. Subjects participated in at least one of the three experiments. The first two involved fatigue, the third vibration. All experimental procedures were approved by Monash University Committee for Human Experimentation, and were conducted in accordance with the Declaration of Helsinki.
Subjects were required to attend a number of sessions. The first was to familiarise them with the equipment and proprioception tasks. After familiarisation, a screening procedure excluded those subjects who were unable to achieve acceptable matching accuracy for position (mean>3°or SD>3.5°) and velocity (mean>4°s−1 or SD>0.5°s−1). In a pilot study, it had been established that most subjects were able to perform within these limits. Inclusion of more erratic performances risked obscuring trends in the data. In practice, of a total of 15 subjects screened for the position-matching experiment, four were excluded from each of the two groups. One subject was excluded from the movement-tracking experiment.
Testing apparatus
Subjects had both forearms strapped to a pair of lightweight paddles (Fig. 1). The upper arm was kept at approximately 45° to the horizontal. Forearm angle was given in degrees above the horizontal, which was assigned a value of zero. Elbow angle was given by potentiometers attached to each paddle and aligned with the axis of the elbow joint. Resolution of the potentiometers was ±0.2°. Position signals were acquired at 40 Hz using MacLab 4/s running Chart software (AD Instruments, Castle Hill, NSW, Australia) on a Macintosh computer.

a The equipment. Blindfolded subjects sat at a table with their forearms strapped to lightweight paddles. The paddles were hinged at one end, with the hinges aligned with the subject’s elbow joint. Potentiometers attached to the paddle hinges provided a voltage signal proportional to elbow angle. b Joint angle records. Examples of potentiometer output for three test angles for the unsupported reference arm (dotted line) and the matching positions adopted by the subject with their indicator arm (solid line)
Position matching task
For the position-matching task (eight subjects), the experimenter placed one (reference) forearm at one of three test positions (15, 30 or 45° from horizontal). Once the arm had been positioned at the test angle, the blindfolded subject was asked to hold it, unsupported, and match its position by voluntary placement of their other (indicator) arm. The subjects indicated verbally when they thought the arms were matched. Position errors were calculated as the difference in angle between the two arms (Fig. 1). Each measurement was repeated five times, presenting different angles in random order. The same procedure was used in all subsequent measurements. For the fatigue experiments, measurements were made immediately before and after the exercise, and 1 h later.
Movement-matching task
For the movement-matching task, a range of movements was selected which included speeds normally used by subjects in a simple pointing task (Hall and McCloskey 1983). The experimenter moved one forearm from the vertical position (90°) into extension at one of the five angular velocities (10, 20, 30, 40 or 50°s−1) and asked the blindfolded subject to “track the movement” as accurately as possible with their other arm. To generate a given movement velocity, the experimenter made use of a template of the required velocity, shown on the computer screen used to display the movement traces. In practice, it was not possible to precisely generate a given movement velocity and values lay scattered about each of the five indicated ranges (Fig. 5). Movement velocity ranges were selected at random. Movement velocity of each arm was calculated from a computer-generated line of best fit in the middle of the movement range (70–20° from horizontal), using Igor Pro Software (Wavemetrics, Lake Oswego, OR, USA). Errors were calculated as the difference in velocity between the two arms. Trials were repeated three times at each velocity. The same was done after fatigue. For the fatigue experiments, measurements were made immediately before and after the exercise, and 1 h later.
Vibration
For the vibration experiments, the movement-matching task was carried out while the elbow flexors of one arm were vibrated, using 80 Hz vibration at approximately 1-mm amplitude. The vibrator was strapped to the belly of biceps brachii. Vibration started ~0.5 s before the beginning of each movement and was turned off once the indicator arm had reached full extension. The vibrator consisted of a weight mounted eccentrically on the shaft of a small electric motor housed in a 3-cm diameter plastic cylinder. Rotation of the motor shaft set up a circular oscillation at 80 Hz.
The exercise
Each subject exercised one arm by lifting a weight (30% of maximum isometric force) with elbow flexors, in sets of ten repetitions, with a rest of 15 s between sets. Exercise was performed until the subject could no longer fully lift the weight. Subjects carried out a mean of 330 contractions (range 90–730) to achieve an adequate force drop. At the end of the exercise, subjects carried out three maximum voluntary contractions (MVCs) on each arm, which took approximately 10 min, and then they were strapped into the position-matching apparatus. This took a further 5 min. It meant that 15 min had elapsed between the end of the exercise and the start of the matching experiment.
Maximum voluntary force
Before and after the exercise, maximum isometric force of elbow flexors of each arm was measured. To do that, each paddle was fixed in the vertical position (90° elbow flexion) by means of a horizontal metal strut, which was attached to a tension transducer. For these measurements, position of the upper arm was horizontal. It meant that elbow flexors were at approximately their optimum length (Weerakkody et al. 2003).The subjects were asked to contract their arm maximally with verbal encouragement for ~3 s. Maximum force was calculated as the average peak force from three isometric contractions, separated by 1 min rest periods. The measurement was repeated after the exercise to determine whether the force had dropped sufficiently (30%). If not, additional exercises were carried out. Position-matching trials were started approximately 5 min after the force measurements.
Statistics
Position errors were calculated as angle (reference arm)−angle (indicator arm), where 0°=horizontal forearm and 90°=vertical forearm. Velocity errors were calculated as velocity (reference arm)−velocity (indicator arm). Data was analysed using the software Igor Pro Version 4 (Wavemetrics, Lake Oswego, OR, USA) running on an Apple iMac computer. Statistical Analysis used Data Desk 5.0 (Data Description, Ithaca, NY, USA). The analysis used a repeated measures ANOVA to test for changes in position and velocity errors over the three time points, pre-exercise, immediately post-exercise and 1 h later, and for interactions between errors and the size of the force drop. Where significance was found, a Scheffe post hoc test was used for individual comparisons. Regression anlysis was used to obtain the slope of the relationship between force and errors. Significance was accorded a p<0.05. Results in the text are given as mean ± standard error of the mean (SEM).
Results
Fatigue and sense of position
The working hypothesis for this experiment was that the fatigue in elbow flexors after a period of concentric exercise would lead to forearm position-matching errors. The aim of the exercise was to reduce MVC by 30%. To achieve this, the subjects had to carry out various numbers of repetitions, depending on their fitness.
In Fig. 2a are shown observations made on a subject whose force had dropped by 41% after 330 contractions of the reference arm. Before the exercise, the subject was quite accurate with a mean position-matching error of +0.7° (±0.7°) at 15°, +0.6° (±0.9°) at 30° and −1.2° (±1.0°) at 45°. When the fatigued reference arm was placed at 15°, it was matched by the unexercised indicator adopting a more extended position by 3.8° (±1.1°). At the test angle of 30°, the error was 3.6° (±1.1°) in the same direction. Finally at 45°, the error was 3.9° (±0.5°).

Matching errors after concentric exercise. a In this experiment the reference arm had been fatigued and the subject showed a 41% force drop in MVC. Open circles position-matching errors before the exercise, filled circles after the exercise. Dotted line zero error. Errors were positive when the indicator arm adopted a more extended position than the reference. All values are means (±SEM). b Pooled data for eight subjects. Asterisk indicates significant difference
The subjects were variable in their matching accuracy before the exercise, but with a fatigued reference arm, they systematically adopted a more extended position with their indicator arm (Fig. 2b). To show the effect of fatigue more clearly, position errors for the three test angles were combined for all subjects (Fig. 3).

Changes in muscle force and position-matching errors after fatigue from exercise. a Indicator arm fatigued, b reference arm fatigued. Upper panel drop in MVC, expressed as a per cent of pre-exercise force plotted against time in hours. Pre-measurement = before the exercise. 0=measurement immediately after exercise. 1=measurement 1 h later. Dashed line indicates 100% (pre-exercise MVC). Lower panel position errors. Here, the errors for the three test angles have been pooled. Dashed line indicates zero error. Errors were positive when the indicator arm adopted a more extended position than the reference. They were negative when it was more flexed. All values, means (±SEM) for eight subjects. Asterisks indicate significant difference
The force measured immediately after the exercise was 71.5% (±3.3%) of its initial value when the indicator arm was exercised, and 68% (±4.1%) when the reference arm was exercised. By 1 h after the exercise, the force had recovered and was 90.6% (±2.9%) of the control value for the indicator arm and 87.7% (±3.4%) for the reference arm.
Position-matching errors were measured before, immediately after the exercise, and 1 h later. Six of eight subjects showed errors in the direction of extension when the reference arm had been fatigued. By 1 h later, the force had partially recovered and the direction of the errors had reversed (Fig. 3). For seven of eight subjects, errors were in the opposite direction when the indicator arm was fatigued. It meant that the fatigued indicator arm matched the elbow angle set by the unexercised reference arm by adopting a more flexed position. Again, 1 h later, as force recovered, the size of the errors became less (Fig. 3).
The data was analysed by means of a repeated measures ANOVA, with position error as the dependent variable and time (pre-exercise,immediately post-exercise, 1 h later) as the factor. Since the same subjects were used for fatigue of reference and indicator arms, the subject was treated as a nested variable. The analysis showed a significant effect of time on position errors. A Scheffe post hoc test showed that the 1.9° change in mean error after fatigue of the indicator arm and the 1.7° change after fatigue of the reference arm was significant.
Position errors for all subjects were plotted against force (percent pre-exercise value). An analysis was performed using a general linear model with position error as the dependent variable, MVC of the fatigued arm and fatigued reference or indicator arms (three trials with eight subjects for each exercise) as factors. The interaction between these two factors indicated whether there was a dependence of position errors on the extent of fatigue and whether this depended on which arm had been fatigued. The interaction was found to be significant, that is, position errors were larger for larger force drops and were in opposite directions depending on whether the indicator or reference arm had been fatigued. A linear regression analysis of force against error gave a slope of +0.07° per % MVC for the fatigued indicator arm, and −0.03° per % MVC for the fatigued reference arm.
Movement tracking during fatigue and vibration
This experiment was designed to test the hypothesis that fatigue disturbed the sense of limb movement as well as the sense of position. Here, the experimenter moved one arm from a vertical position into full extension and the subject was required to track the movement. An example of movement tracking before the exercise is shown in Fig. 4a. There was a slight delay before the subjects began to move their indicator arm and this meant that it initially lagged the reference. However, it quickly caught up and for the rest of the movement, continued the tracking accurately.

Movement-tracking task. Example records for one subject, of their ability to track with their indicator arm (solid line) the imposed movement of the reference arm (dotted line). The movement began with the forearm vertical and continued until it was horizontal. a Control traces, b tracking after the subject’s elbow flexors of the reference arm had been fatigued by 25%. c Tracking while the reference biceps muscle was vibrated at 80 Hz throughout the movement
After exercising the indicator arm to fatigue, its force had dropped to 72% (±3%) of the pre-exercise value. In a second series, the reference arm was fatigued and its force dropped to 69% (±4%). In the event, fatigue of one arm, be it the reference or indicator, did not significantly disturb the movement-tracking performance. One example, where the reference arm had been fatigued by 25%, is shown in Fig. 4b. Movement-tracking performance for a range of different movement speeds, with and without fatigue, is shown for one subject in Fig. 5a. There was a tendency in all the subjects, for an increase in movement-tracking error at the higher movement speeds, above 30°s−1. However, there were no significant increases in tracking errors in the presence of fatigue. The pooled data for all subjects and movement speeds is shown in Fig. 6.

Movement tracking at different speeds. Measurements of tracking errors measured over a range of movement speeds for one subject. Indicator arm and tracking arm movement speeds were calculated by a line fitted to the middle portion of the movement trace, from 70° to 20°. Movement speeds were generated over the ranges 10–50°s−1. Open circles control values. The filled circles in (a) are where the reference arm had been fatigued (25% of MVC). b reference arm vibrated

Pooled data for movement-tracking task. Velocity errors for indicator arm (Ind) and reference arm (Ref) when they were either fatigued (left-hand panel) or vibrated (right-hand panel). Positive errors are when the indicator arm moved faster than the reference, negative errors when it was slower. Values are means (±SEM). Asterisks indicate significant difference
The experiment testing the effects of fatigue on movement-tracking accuracy was based on the premise that the sense of effort contributed to movement sensation. If tracking performance did not deteriorate with fatigue, it would indicate that the sense of effort was not involved. It would presumably leave the muscle spindles as the principal source of the movement signals (Goodwin et al. 1972). If so, experimentally disturbing the spindle signal should interfere with movement-tracking accuracy. The primary endings of muscle spindles are sensitive to vibration (Roll et al. 1989). To test the spindle hypothesis, the biceps muscle of one arm was vibrated during the movement-tracking task.
An example of a single trial is shown in Fig. 4c. Here, the reference arm was vibrated at 80 Hz throughout the movement. Although onset of movement of the indicator arm was slightly delayed throughout the movement, it indicated a higher speed of movement than had actually taken place. This finding was consistent for a range of tracking speeds (Fig. 5b) and the disturbance was larger for the higher tracking speeds. The trend was in the opposite direction when it was the indicator arm, which was being vibrated. That is, the movement speed was underestimated. Vibration of the reference arm led to an average overestimation of the movement speed by 3.7°s−1 (±1.1°s−1). When the indicator was vibrated, the movement speed was under-estimated by an average of 4.6°s−1 (±1.2°s−1). The pooled data for all velocities and subjects are shown in Fig. 6. These effects were significant.
A repeated measures ANOVA was carried out with velocity error as the dependent variable and whether or not vibration was applied as the factor (three values at each of five velocities for six subjects when the indicator was vibrated and for seven subjects when the reference was vibrated). Vibration was found to be a significant factor for both groups.
Discussion
Fatigue and sense of position
The observations that led to this study were the presence of significant position-matching errors in a forearm-matching task after eccentric exercise (Walsh et al. 2004). The fact that such exercise caused muscle damage raised the possibility that the damage process extended to muscle receptors, specifically, the intrafusal fibres of muscle spindles and it was the damage to muscle spindles that was responsible for the matching errors. However, recent animal observations have shown that there is no evidence of a change in spindle responsiveness to stretch and to fusimotor stimulation after the damage and fatigue from severe eccentric exercise (Gregory et al. 2004).
If muscle spindles were not responsible for the position errors after the exercise, what other factors might be responsible? Since the damaged muscle produced less force, it required more effort to maintain a given arm position against the force of gravity. It led us to propose that subjects were matching their efforts to align their arms. So the weaker elbow flexors of the fatigued arm would match the effort required to hold the unfatigued arm by adopting a more vertical position where the force of gravity was less. That, in turn, would produce the matching errors (Walsh et al. 2004).
An important consequence of this conclusion was that all forms of exercise that produced muscle fatigue should lead to position-matching errors, not just eccentric exercise. In our earlier experiments, we tested this conclusion by reducing muscle force with concentric exercise, which is known to produce fatigue without damaging the muscle (Newham et al. 1983a, b). Concentric exercise was found to also produce position-matching errors, but these were significant only in one direction, when the unexercised arm was the reference and the indicator had been fatigued (Walsh et al. 2004).
One aim of the present experiments was to re-examine position matching after concentric exercise, but to use a larger number of subjects, in an attempt to bring errors in both directions to significance. This aim was achieved, but as in the earlier study, mean pooled errors were relatively small. Walsh et al. (2004) reported a correlation between matching error and MVC decline for concentric exercise at 0.053° per % MVC fall in force [Walsh et al. (2004), Fig. 5]. A fall of 30% MVC would therefore be expected to produce a 1.6° error. That corresponds closely with errors observed here of 1.7–1.9° (see Fig. 3). We conclude that when subjects carry out a position-matching task while holding their unsupported arms against the force of gravity, an important source of positional information is the amount of effort required to hold the arm. If arm muscles are fatigued after exercise, the amount of effort required to maintain a given position will be increased. Instructing the subject to match forearm position will therefore lead to matching errors. In drawing this conclusion, we do not mean to imply that there is no role for muscle spindles in the sense of position. Rather, our current working hypothesis is that we receive positional cues both from signals of central origin (effort) and peripheral origin (muscle spindles). See also Winter et al. (2005).
Movement tracking during fatigue and vibration
Muscle spindles have traditionally been thought to be responsible for both our sense of limb position and sense of limb movement. That view is based on the pioneering observations of Goodwin et al. (1972) who studied the effects of muscle vibration. Re-reading that work leaves the reader with the impression that vibration produces primarily an illusion of movement although it “induces a small, but significant distortion of the sense of absolute position”. If the vibration effects described by Goodwin et al. are the result of stimulation of muscle spindles, it suggests that spindles do contribute to the sense of position. The work reported here has shown that fatigue disturbs sense of position, consistent with the idea that the sense of effort can provide positional information as well. We then posed the question, could the sense of movement similarly include a component susceptible to fatigue? In the event, our data did not provide any evidence of deteriorating accuracy in a movement-tracking task when arm muscles had been fatigued. It leads us to the tentative conclusion that, at least under the conditions of our experiment, fatigue and any associated changes in the sense of effort, do not seem to be involved in generation of the sense of movement.
It has recently been reported that stretch of skin of the dorsal forearm evoked in some subjects illusions of elbow flexion (Collins et al. 2005). The findings suggest that input from skin can provide additional movement-related information at the elbow joint.
While fatigue had no effect on movement-tracking accuracy, vibration did. Here, we have shown that vibration of a muscle, be it the reference or indicator arm, produced significant errors in a movement-tracking task. Vibration is a selective stimulus for excitation of the primary endings of muscle spindles (Roll et al. 1989). When the reference arm was vibrated, the movement was perceived to be faster than it had actually been. When the indicator arm was vibrated, it moved more slowly than the reference (Figs. 5, 6). All of this is consistent with the view that muscle spindles are the principal source of afferent information for the detection of movement, keeping in mind that vibration-sensitive receptors in the skin overlying the muscle would also be stimulated. Such a conclusion fits with the low movement-detection thresholds at the human elbow joint and their contraction-history dependence (Goodwin et al. 1972; Taylor and McCloskey 1992; Wise et al. 1998). It is also consistent with the muscle-history dependence of the perceived speed of the movement illusion during vibration (Gooey et al. 2000).
Wider implications
If it is accepted that for certain tasks, where we actively place our limbs and maintain their position against the force of gravity by voluntary contraction, the sense of effort plays a role, it begs the question, what is the role of muscle spindles in such tasks? Clearly, as quoted above, Goodwin et al. (1972) believed that spindles did make a contribution to the sense of position. As mentioned in the Introduction, during active limb positioning, matching errors are in the range 1–3°. The errors become much bigger, 12–15°, when the reference arm is supported (Goodwin et al. 1972; Paillard and Brouchon 1968; Gregory et al. 1988). When the arm is supported, elbow muscles are relaxed and therefore no effort signal is involved. It suggests that, in the absence of an effort cue, spindles, by themselves, do provide a position signal, but not a very accurate one.
There is one other observation that supports the view that spindles contribute to the sense of position. It is based on the muscle property called thixotropy. Thixotropy is the dependence of passive tension and stiffness in the muscle on the previous history of contraction and length changes. For a review see Proske et al. (1993). We have previously demonstrated in an animal model that systematic changes in the level of spindle-resting activity, attributable to a change in intrafusal passive tension, were generated by conditioning the muscle with a contraction or stretch (Gregory et al. 1988). Then, in an experiment on human forearm-position sense, matching errors were found to be distributed systematically, according to how the reference arm had been conditioned (Gregory et al. 1988). The data suggested that although the position signal coming from the arm was not very accurate, it could be manipulated by means of muscle-history effects. Kinaesthetic inputs from sources other than muscle spindles, such as skin or joints, would not be expected to show a contraction in history-dependence.
Our current working hypothesis is that accurate placement of our forearms is achieved by a combination of effort-related signals and spindle signals. How these two sources of kinaesthetic information combine to give us our normal positional acuity will be the subject of future experiments (see Winter et al. 2005).
To conclude, it appears that the view first proposed by von Helmholtz (1867) of a “sensation of innervation” is re-emerging. We currently believe that the sense of force makes use of effort signals (Carson et al. 2002; Weerakkody et al. 2003). Now the evidence is growing for a contribution by effort signals to the sense of position. An important consequence of all of this from a practical point of view is that fatigue from exercise is expected to be accompanied by a disturbance to proprioception. That conclusion has implications for the performance of competing athletes and for sports injuries.
References
Brockett C, Warren N, Gregory JE, Morgan DL, Proske U (1997) A comparison of the effects of concentric versus eccentric exercise on force and position sense at the human elbow joint. Brain Res 771:251–258
Carson RG, Riek S, Shahbazpour N (2002) Central and peripheral mediation of human force sensation following eccentric or concentric contractions. J Physiol 539:913–925
Collins DF, Refshauge KM, Todd G, Gandevia SC (2005) Cutaneous receptors contribute to kinesthesia at the index finger, elbow and knee. J Neurophysiol 94:1699–1706
Eklund G (1972) Position sense and state of contraction; the effects of vibration. J Neurol Neurosurg Psych 35:606–611
Gandevia SC (1996) Kinaesthesia: roles for afferent signals and motor commands. In: Rowell LB, Shepherd JT (eds) Handbook of physiology, section 12, exercise: regulation and integration of multiple systems. Oxford University Press, NY, pp 128–172
Gandevia SC, Allen GM, Butler JE, Taylor JL (1996) Supraspinal factors in human muscle fatigue: evidence for suboptimal output from the motor cortex. J Physiol 490:529–536
Goodwin GM, McCloskey DI, Matthews PB (1972) The contribution of muscle afferents to kinaesthesia shown by vibration induced illusions of movement and by the effects of paralysing joint afferents. Brain 95:705–748
Gooey K, Bradfield O, Talbot J, Morgan D L, Proske U (2000) Effects of body orientation, load and vibration on sensing position and movement at the human elbow joint. Exp Brain Res 133:340–348
Gregory JE, Brockett CL, Morgan DL, Whitehead NP, Proske U (2002) Effect of eccentric muscle contractions on Golgi tendon organ responses to passive and active tension in the cat. J Physiol 538:209–218
Gregory JE, Morgan DL, Proske U (1988) Aftereffects in the responses of cat muscle spindles and errors of limb position sense in man. J Neurophysiol 59:1220–1230
Gregory JE, Morgan DL, Proske U (2004) Responses of muscle spindles following a series of eccentric contractions. Exp Brain Res 157:234–240
Hall LA, McCloskey DI (1983) Detection of movements imposed on finger, elbow and shoulder joints. J Physiol 335:519–533
Lam T, Pearson KG (2002) The role of proprioceptive feedback in the regulation and adaptation of locomotor activity. Adv Exp Med Biol 508:343–355
Marks R, Quinney HA (1993) Effect of fatiguing maximal isokinetic quadriceps contractions on ability to estimate knee position. Perceptual Motor Skills 77:1195–1202
Newham DJ, McPhail G, Mills KR, Edwards RHT (1983a) Ultrastructural changes after concentric and eccentric contractions of human muscles. J Neurol Sci 61:109–122
Newham DJ, Mills KR, Quigley BM, Edwards RH (1983b) Pain and fatigue after concentric and eccentric contractions of human muscle. Clin Sci (Lond) 64:55–62
Paillard J, Brouchon M (1968) Active and passive movements in the calibration of position sense. In: Freedman S (ed) The neuropsychology of spatially oriented behaviour. Dorsey Press, Homewood, pp 37–55
Proske U, Morgan DL, Gregory JE (1993) Thixotropy in skeletal muscle and in muscle spindles: a review. Prog Neurobiol 41:705–721
Roll JP, Vedel JP, Riobot-Ciscar E (1989) Alteration of proprioceptive messages induced by tendon viobration in man: a microneurographic study. Exp Brain Res 76:213–222
Saxton JM, Clarkson PM, James R, Miles M, Westerfer M, Clark S, Donnelly AE (1995) Neuromuscular dysfunction following eccentric exercise. Med Sci Sports Exerc 27:1185–1193
Sharpe HH, Miles TS (1993) Position sense at the elbow after fatiguing contractions. Exp Brain Res 94:179–182
Skinner HB, Wyatt MP, Hodgdon JA, Conrad DW, Barrack RL (1986) Effect of fatigue on joint position sense of the knee. J Orthop Res 4:112–118
Skoglund S (1973) Joint receptors and kinaesthetics. In: Iggo A (ed) Handbook of sensory physiology. Springer-Verlag, NY, pp 111–136
Taylor JL, McCloskey DI (1992) Detection of slow movements imposed at the elbow during active flexion in man. J Physiol 457:503–513
von Helmholtz H (1867) Treatise on physiological optics. In: Optical society of america, vol 3 1925, Menasha, Wisconsin (Translation by JPC Southall of 3rd German edn)
Walsh LD, Hesse CW, Morgan DL, Proske U (2004) Human forearm position sense after fatigue of elbow flexor muscles. J Physiol 558:705–715
Weerakkody NS, Percival P, Morgan DL, Gregory JE, Proske U (2003) Matching different levels of isometric torque in elbow flexor muscles after eccentric exercise. Exp Brain Res 149:141–150
Winter J, Allen TJ, Proske U (2005) Muscle spindle signals combine with the sense of effort to indicate limb position. J Physiol 10.1113/005.092619
Wise AK, Gregory JE, Proske U (1998) Detection of movements of the human forearm during and after co-contractions of muscles acting at the elbow joint. J Physiol 508:325–330
Acknowledgements
The work was carried out with support from the National Health & Medical Research Council of Australia. We would like to thank D.J. Tracey for his suggestions for the experiments, and D.L. Morgan for his help with the statistics.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Allen, T., Proske, U. Effect of muscle fatigue on the sense of limb position and movement. Exp Brain Res 170, 30–38 (2006). https://doi.org/10.1007/s00221-005-0174-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-005-0174-z