
Abstract
This is an account of experiments carried out in my laboratory over more than 20 years, exploring the influence of exercise on human limb position sense. It is known that after intense exercise we are clumsy in the execution of skilled movements. The first question we posed concerned eccentric exercise, where the contracting muscle is forcibly lengthened. Such exercise produces muscle damage, and the damage might extend to the muscle’s proprioceptors, the muscle spindles, producing a disturbance of limb position sense. However, provided the exercise was sufficiently severe (20–30% fall in muscle force), comparing eccentric exercise with concentric exercise, where no damage ensues, there was no difference in the effects on position sense. After exercise of elbow muscles, the forearm was always perceived as more extended than its actual position. It led to a new hypothesis: after exercise, did the extra effort required to lift the fatigued arm provide a position signal? Findings based on spindles’ thixotropic behaviour did not support such a proposition for the elbow joint, although at the wrist an effort signal may contribute. Spindle thixotropy has also been proposed to explain the poor proprioception experienced under conditions of weightlessness. After exercise of elbow extensors or flexors, the position errors were always in the direction of forearm extension. At the knee, after exercise the lower leg was always perceived as more flexed. These findings led to the conclusion that disturbances to position sense, post-exercise, did not involve peripheral receptors, and that the effect arose within the brain.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Traditionally, the term proprioception refers to conscious sensations associated with the actions of our bodies as we move about in our surroundings. They are sensations generated by our own activities, rather than by aspects of our environment, where senses such as vision, hearing or touch play an important role. Proprioception includes the senses of position and movement of the body and its parts, often lumped together as the kinaesthetic senses. Then there are the senses of effort and of heaviness when we lift objects and the sense of muscle force. While the sense of balance is often included as a proprioceptive sense because in a number of aspects there is overlap between the two, it is distinct in that it is predominantly controlled by the vestibular system (Day and Fitzpatrick 2005). In the present account, the sense of balance will not be discussed further.
Proprioceptive sensations are not just concerned with body movements. They contribute to the generation of our body image. In the rare instances where someone has lost their proprioceptive senses (Cole 1995), the first dramatic symptom is loss of self. The individual feels disembodied, floating in air. Every movement needs to be learnt under visual control and recovery is a long and arduous process. There is a gradual return of embodiment and it appears that for its recovery the intention to move is as important as any available feedback (Cole 2007). So, not surprisingly, proprioception plays a larger role in our self-awareness than we might have suspected.
When we move our arms, the sensations generated by the movements remain largely unconscious. Where is my arm when I cannot see it? If asked, I am able to precisely locate it, but would normally remain oblivious of its position, unless something unforeseen happens, like the arm unexpectedly striking a foreign object. Therefore, any sensations during routine movements remain unconscious, but accessible. This has led to the idea that the actual sensory experience we have represents the difference between what is expected from the movements we make and what has actually occurred. The concept of comparing predicted signals with the actual outcome arises repeatedly in studies of proprioception.
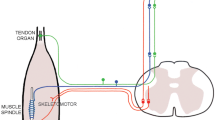
The majority of peripheral proprioceptors are located in our muscles. Receptors responsible for our kinaesthetic senses are the muscle spindles (Goodwin et al. 1972). In addition, there is some evidence that both muscle spindles and tendon organs participate in the senses of force and effort (Proske and Allen 2019). For the sense of limb movement, there is additional evidence for a contribution from skin receptors, most probably the slowly adapting Type II receptors, served by Ruffini endings (Collins et al. 2005). The role of joint receptors in proprioception remains controversial, even though they have been extensively studied. An influential view is that they act as joint limit detectors (Ferrell and Smith 1988), contributing to position sense near the limits of joint movements (Fuentes and Bastian 2010).
It has long been hypothesised that in addition to signals arising in the body periphery, copies of motor commands (efference copy) are able to be transmitted to sensory areas in the brain to generate conscious sensations. It is hypothesised that a sense of effort may be generated in this way. During exercise, as we fatigue, we experience an increase in the sense of effort as the motor commands compensate for the developing muscle fatigue with increased recruitment and rate coding.
Proprioceptive sensations can be disturbed by exercise, such as the increase in effort during fatigue. In addition, there is evidence that our sense of limb position can be altered by fatigue from exercise. This could be important since misplacement of our limbs during exercise and sport, as a result of fatigue effects on position sense, risk triggering sporting injuries. In addition, some exercise is associated with muscle damage. This raises the spectre of damage-related changes in proprioception, again leading to more major injuries. These are matters considered in the present review. In addition, potentially disturbing influences such as muscle loading and effects of vibration will be discussed as ways of exploring proprioceptive mechanisms.
Exercise and the kinaesthetic senses
Present-day usage of the term ‘kinaesthesia’ includes the senses of limb position and limb movement (Proske and Gandevia 2012). Originally, sensations of limb position and movement were considered to be two aspects of a single sense, kinaesthesis (Bastian 1880). It was a reasonable position to adopt, since both sensations arise from signals in muscle spindles. Furthermore, muscle vibration, to which muscle spindles are highly sensitive, generates sensations of both movement and displaced position (Goodwin et al. 1972). Today, we believe that both the primary and secondary endings of muscle spindles contribute to the sense of limb position, while the dynamic sensitivity of the primary endings is responsible for signals that generate movement sensations (Matthews 1972). In a study of position and movement sensations, McCloskey (1973) argued that the two senses were generated by separate lines of input and that position sense was not derived from an integration of the velocity signal (see also Sittig et al. 1985).
There are three different forms of exercise: eccentric exercise, where the contracting muscle is stretched by external forces; concentric exercise, where it shortens during the contraction; and isometric exercise where the muscle is held fixed in length while it is contracting. The study of eccentric and isometric exercise has been of particular interest to us since they are both known to be associated with muscle damage and delayed soreness. For detailed accounts, see Proske and Morgan (2001) and Allen et al. (2018). The spectre of muscle damage from exercise raises the possibility that not only do the ordinary muscle fibres become damaged, but the smaller intrafusal fibres of muscle spindles might be affected as well. If so, disturbance to intrafusal fibres would alter spindle function and therefore directly impact limb position sense.
The relationship between exercise and kinaesthesia has been an area of interest in our laboratory for many years. It derives from earlier studies of the mechanics of exercise and the accompanying fatigue. In the process of exploring the possibility of damage to muscle spindles by eccentric exercise, we became aware of a fundamental property of skeletal muscle and its muscle spindles, thixotropy, a property that had to be taken into consideration in evaluating the observations (Morgan et al. 1984). At the time, we were the only group studying this property in muscle spindles and its impact on position sense (Gregory et al. 1988). Consequently, the field is rather narrow, with our own work featuring prominently throughout. Hopefully, in the future, the tortuous path taken by our explorations may tempt others to enter the field and provide their own novel insights.
We have all had the experience of feeling wobbly on our feet and clumsy in the execution of skilled movements after a period of strenuous exercise. Such experiences have led to the suggestion that exercise can influence our kinaesthetic senses. In modern society, given the popularity of exercise in helping to offset a sedentary lifestyle and, for elite athletes, to achieve ever better performances, any suggestions that sports injuries might arise because of disturbed kinaesthesia have attracted growing interest. Over the years, there have been specific claims made that the sense of limb position can be disturbed by exercise (Skinner et al. 1986; Saxton et al. 1995; Brockett et al. 1997; Ribeiro et al. 2007). Here, we discuss the evidence for such disturbances and their possible mechanisms.
Damage from eccentric exercise and position sense
Brockett et al. (1997) studied the effects of exercise on position sense using an ingenious ‘arm curl’ machine. Subjects had their arms strapped to supports which were hinged below the elbow joint. One arm was flexed against a stiff spring and, in the process, compressed the spring to carry out a concentric contraction with its elbow flexors. Once the spring was fully compressed, elbow flexors of the other arm had to slowly release the spring from compression, thereby carrying out an eccentric contraction. Subjects were required to carry out 120 contractions with each arm. This led to a 10% fall in maximum voluntary contraction (MVC) force in the eccentrically exercised arm and a 14% fall in the concentrically exercised arm. In a subsequent position-matching task, blindfolded subjects had one arm, the reference arm, placed at a chosen test angle by the experimenter and they had to match its position with their other arm (Fig. 1). It was found that the position of the eccentrically exercised arm always lay in the direction of extension relative to the concentrically exercised arm. It was proposed that muscle receptors in this arm had become damaged by the exercise, lowering the level of discharge in its muscle spindles. Therefore, to achieve matching levels of spindle discharge from the two arms, elbow flexors of the eccentrically exercised arm had to be stretched further, the arm more extended than the concentrically exercised arm.

Redrawn from Tsay et al. (2016)
Measuring position sense. Position sense at the forearm was measured by a blindfolded subject with their arms strapped to a pair of paddles. Forearm position was monitored using potentiometers located at the hinges of the paddles which were co-linear with the elbow joint. One arm was designated the reference and the other the indicator. The experimenter placed the reference at the test angle and the subject held it there while they brought up the indicator into a matching position
These conclusions were subsequently challenged (Walsh et al. 2004), claiming that it was difficult to interpret the findings since no control measurements had been made on unexercised arms, the levels of fatigue in the two arms were not the same and the falls in force were rather small. Therefore, the experiment was repeated in a simplified form; only one arm was exercised eccentrically or concentrically. The unexercised arm acted as a control. Subjects were found to match the position of their exercised arm with the unexercised arm adopting a more extended position. Provided the falls in force post-exercise were similar, the effects on eccentrically or concentrically exercised arms were not significantly different. This was the same outcome as had been reported previously by Saxton et al. (1995).
If the exercised arm’s position was matched by the unexercised arm adopting a more extended position, it implied that at a given muscle length the position signal coming from the exercised arm was stronger than for the unexercised arm. Given that the position signal was believed to come from muscle spindles, which are stretch receptors, the unexercised elbow flexors had to be stretched further, the arm more extended, to raise its spindle signal and achieve a satisfactory match. Similar effects of fatigue on position sense have been reported by a number of other groups (Skinner et al. 1986; Sharpe and Miles 1993; Lattanzio et al. 1997; Forestier et al. 2002; Ribeiro et al. 2007). In the search for an explanation, animal experiments were resorted to (Pedersen et al. 1998). The observed “decreased discriminative capacity of afferents”, which was believed to underlie the fatigue-related changes in position sense, was hypothesised to be the result of the chemical products of fatigue acting on muscle group III and IV afferents. It was proposed that activity in these small afferents reflexly excited fusimotor neurones, leading to changes in responses of spindles (Pedersen et al. 1998).
It is relatively straightforward to eliminate hypotheses of this kind. As stated above, the effects of fatigue on position sense were similar for both eccentric and concentric exercise. That makes it unlikely that damage related to eccentric exercise was involved, since there is no evidence of damage after concentric exercise. After concentric exercise, effects of fatigue have subsided by 2 h post-exercise (Smith and Newham 2007). By contrast, after eccentric exercise there is a much longer lasting deficit in muscle force due to damage to muscle fibres. This has made it possible to measure position sense at 24 h after such exercise, when a significant deficit in force was still present, but the chemical products of fatigue were long gone. Provided the fall in force at this time was large enough (28% below pre-exercise values), significant errors in position sense could still be demonstrated (Tsay et al. 2012).
Finally, to lay to rest the hypothesis that position errors after eccentric exercise could be attributed to damage to muscle receptors, a series of animal experiments was carried out (Gregory et al. 2002, 2004). The responses of single identified muscle spindles were studied before and after a period of eccentric exercise of the muscle (Gregory et al. 2004). Mechanical measurements showed that the muscle had been significantly damaged by the exercise (46% drop in MVC), yet there was no evidence of an altered responsiveness of muscle spindles. This outcome was attributed to the rather compliant connections made by intrafusal fibres on adjacent extrafusal fibres, providing them with protection against damage. A similar outcome was achieved in a study of responses of tendon organs (Gregory et al. 2002).
The sense of effort and position sense
The findings of Walsh et al. (2004) supported the view that for both concentric and eccentric exercise, the position signals in elbow flexors of the exercised arm were higher than in the control, which meant that the control arm had to have its elbow flexors stretched further, the arm more extended, to achieve a satisfactory match. For both kinds of exercise, the position errors peaked when the fall in force from fatigue was at a maximum. In addition, the sizes of the errors correlated with the fall in MVC. This finding led to the proposal for a new hypothesis. It was suggested that the effort required to maintain position of the fatigued arm against gravity provided positional information. When elbow flexors were fatigued, the position of the exercised arm was perceived as more extended due to the greater effort required to support it at the test angle (Walsh et al. 2004).
This idea was pursued further by Winter et al. (2005). Here, in an attempt to disturb the sense of effort, rather than fatiguing the arm with exercise, it was loaded with weights. In an experiment in which the relaxed reference arm was placed on a support at the test angle, subjects matched its position by placing their indicator arm in the direction of flexion of the reference arm’s actual position and subjects were rather erratic in their matching performance. When the experiment was repeated, but this time the subject had to support their reference arm themselves, subjects were less erratic and errors lay systematically in the direction of arm extension compared with when the arm had been supported (Winter et al. 2005, Fig. 2). This trend became even more pronounced when the unsupported reference arm was loaded with a 2 kg weight. It was argued that these effects could be accounted for by postulating that the effort required to hold an arm against the force of gravity provided some positional information. That is, if subjects were matching efforts between the arms, the extra effort required to lift the loaded reference arm would lead the indicator arm to adopt a more extended, more nearly horizontal, position where a larger vector of the force of gravity was acting on the arm.
Similar conclusions were drawn from an experiment in which the arms were counterweighted, so could be moved in the vertical plane with minimal effort, or the matching was done in the horizontal plane, in a gravity-neutral posture (Walsh et al. 2006). Here, the intention was to test whether removal of any effort sensation from holding the arms against gravity influenced matching performance. It was found that under these conditions matching was erratic, with significant increases in the standard deviation of matching errors, compared with when subjects had to support their arms themselves. In addition, under the weightless conditions there were no significant effects of exercise on limb position sense (Walsh et al. 2006). All of this raised the question, did exercise really have an effect on position sense, or was it just a matter of the fatigue raising the effort signal?
In a new experiment, carried out entirely in the horizontal plane (Ansems et al. 2006), the effects of loading the arm were re-visited. It was found that if the method of muscle conditioning was taken into account, loading the arm did not introduce additional position errors, a conclusion directly challenging the effort hypothesis.
Muscle thixotropy and position sense
At this point, it is necessary to provide some background to the method of conditioning a muscle, to put its spindles in a defined state. Skeletal muscle has passive mechanical properties that are dependent on the history of the muscle, whether it has been contracted or stretched during the immediate previous period. This property is referred to as thixotropy (Lakie et al. 1984). It is attributed to the presence, in the resting muscle, of a small number of attached cross-bridges between actin and myosin in sarcomeres. The behaviour of these bridges to stretch was first described by Hill (1968). Our contribution to this topic has been to provide evidence for similar thixotropic behaviour by the intrafusal muscle fibres of muscle spindles. The original observations were carried out on single identified muscle spindles in animal experiments (Morgan et al. 1984) and the insight obtained was applied to studies of human limb position sense (Gregory et al. 1988) The subject has been reviewed several times (Proske et al. 1993, 2014; Proske and Gandevia 2018).
The hypothesis that the effort required to lift an arm against the force of gravity provides positional information is based on a distribution of errors that can, in fact, be attributed to thixotropic behaviour of muscle spindles. In experiment 1 of Winter et al. (2005), arm muscles were left unconditioned. Our experience tells us that when a subject moves their arms about freely, pursuing everyday activities, any movements which lead to lengthening and subsequent shortening of muscles leave the intrafusal fibres of spindles in a slack state. It therefore makes it likely that in an unconditioned muscle, some slack will be present in spindles. In a slack spindle, its overall length is less than the lengths of its intrafusal fibres, which fall slack and may even kink (Gladden 1976). This is a consequence of the presence of attached bonds in the intrafusal fibres which exert a splinting action on the fibres to limit their shortening. The presence of intrafusal slack leads to a fall in the resting strain exerted by intrafusal fibres on the spindle sensory ending. Therefore, in a slack spindle resting discharge rates are low and responses to stretch are sluggish. Since it is believed that limb position sense is signalled by the maintained level of spindle discharge (Goodwin et al. 1972), measuring position sense with slack spindles leads to a different outcome compared to when slack is removed with a fusimotor-strength contraction.
In experiment 1 of Winter et al. (2005), when the relaxed reference arm lay on a support, matching errors lay in the direction of flexion from its true position (Winter et al. 2005, Fig. 2). The match was made with an indicator arm that supported its own weight. The starting position for each match had both arms horizontal, lying on a support. Flexing the relaxed reference arm, to move it to the test angle, shortened its elbow flexors which fell slack. It meant that reference elbow flexor spindles generated a low level of activity at the test angle. Since the indicator arm supported its own weight, some slack in the indicator spindles was removed by the muscle activity used to support the arm. Therefore, at the test angle, indicator flexor spindles discharged at a higher rate than for the reference arm. In achieving a satisfactory match, the subject had to flex their indicator arm further to lower its spindle discharge until signals from the two arms matched, leading to errors in the direction of flexion. When the experiment was repeated, but now both arms supported their own weight, errors lay closer to zero.
If the reference arm was loaded with a 2 kg weight, while the indicator supported its own weight, matching errors lay more in the direction of extension (Winter et al. 2005, Fig. 5). It suggested that when an arm supported its own weight, some, but not all slack was removed. It required loading the arm to remove further slack. All of this emphasises the importance of controlling for the thixotropic state in the muscle and its spindles, making sure that no slack remains, by carrying out a fusimotor-strength contraction.
The final piece in the puzzle was put in place by Allen et al. (2007). Not only the reference arm had to be conditioned to control for thixotropy, but also the indicator arm. When both arms were conditioned identically, say, both with a flexor contraction while the arm was held flexed, position errors were small. When one arm was conditioned with a flexor contraction and the other with an extensor contraction, the errors were large. The result emphasised that signals from both arms contributed to determine the accuracy of alignment of the two forearms.
In a matching task, when the two arms were conditioned identically, errors were small, but not exactly zero. After flexion conditioning of both arms, small errors into flexion were seen, and after extension conditioning there were small errors into extension. The reason for these remnant errors was that the reference arm was always placed first at the test angle. This position was then matched by the indicator. Therefore, there was the opportunity for some adaptation of the spindle discharge in the reference arm while the indicator was moved to the matching position (Tsay et al. 2014).
Allen et al. (2007) went on to show that with the arms correctly conditioned to take account of thixotropy, exercise did indeed produce errors in position sense, both after eccentric and concentric exercise. When the exercised arm was the reference, its position was indicated by the other arm adopting a more extended position by 4°–6°. Reversing the roles of the arms and making the exercised arm the indicator reversed the direction of the errors (Allen et al. 2007). This result confirmed that the exercise effects were restricted to one arm only and were not influenced by the arm’s role in the matching process.
Generating a position signal in a loaded arm
Perhaps, the most important observation made by Ansems et al. (2006) and Allen et al. (2007) was that if thixotropy has been taken into account, loading an arm does not introduce additional errors in an arm matching task (Fig. 2). Yet, loading the arm meant that arm muscles had to contract sufficiently strongly for the arm to be able to bear the load. It raised the question, how was a position signal generated in a contracting muscle? The answer to this question had implications for our understanding of the generation of position sense in general, as well as for interpreting the effects of exercise. One consideration in such loading experiments is that the blindfolded subjects were aware that only one arm had been loaded and they could have consciously overridden any torque information (Worringham and Stelmach 1985). Whether that was so or not, it does not change the everyday observation that loading an arm does not appear to disturb its perceived position.

Redrawn from Allen et al. (2007)
Position-matching errors in the vertical plane after loading the arm. Upper panel: individual values for one subject after flexion conditioning of both arms. Matching was carried out under four conditions: (1) with the reference arm supported so that elbow muscles remained relaxed; (2) the subject supported the reference arm themselves (unsupported); (3) a weight, representing 10% MVC force for elbow flexors, was added to the reference arm at the test angle; (4) the weight was increased to 25% MVC. Dotted line, zero matching error. Errors in the direction of extension were assigned positive values, and in the direction of flexion, negative values. Lower panel: pooled data for 12 subjects with errors shown as means (± SEM)
One proposal of a mechanism for generation of position sense in a limb with active muscles is based on the observation that when we generate isometric voluntary contractions in our muscles, this is not accompanied by any sensations of movement. Yet, it is known that during such contractions there is co-activation of skeletomotor and fusimotor neurones (Vallbo 1971, 1974). The fusimotor activity would be expected to produce a large increase in spindle discharges, yet this additional activity does not appear to reach consciousness. To account for the result, McCloskey (1981, see also McCloskey et al. 1983) proposed that when a muscle becomes active, spindle impulses which arise as a result of fusimotor activity (reafference) are subtracted out from the total signal reaching central areas. The template used for the subtraction process is an efference copy of the motor command (Von Holst and Mittelstaedt 1950), which presumably includes fusimotor activity going to muscle spindles. Such a mechanism implies that the brain can derive the passive component of the spindle signal (exafference) from the total signal and use this to determine muscle length, that is, limb position. Rather than postulating a simple subtraction process, Matthews (1982) proposed that the efference copy could be used to determine the reafference, which could be compared with the actual spindle signal reaching the brain in the operation of a forward model (Wolpert et al. 1995; Kawato 1999: Cullen 2004). In a forward model, the motor command signal can be used to estimate, based on past experience, the reafference, the spindle signal generated by that command and so derive the exafferent component.
In a two-arm matching task, a motor command signal is generated in an arm if it is required to support a load. The motor command is used to derive the muscle length-dependent spindle signal and therefore arm position. If the contraction is strong enough to engage the majority of spindles by fusimotor co-activation, presumably a point will be reached where there will no longer be a peripheral spindle signal, uncontaminated by fusimotor-evoked activity. It means that now the positional information must be provided entirely by central processing. There is evidence that something like this can happen. Muscle spindles are very sensitive to vibration. It was first shown by Goodwin et al. (1972) that vibrating arm muscles produced illusions of movement and displaced position of the arm. By definition, the vibration sensation arises in the periphery as an exafferent signal, since it is spindle activity produced by the vibrator probe generating a series of brief stretches of intrafusal fibres. It was found by Goodwin et al. that if subjects carried out an approximately 30% MVC contraction during the vibration, this abolished any kinaesthetic sensations. The result has recently been confirmed in a position-matching task where the vibrated arm had to support a load of 25% MVC (Ansems et al. 2006). Presumably, by 25% MVC, the muscle is sufficiently activated for all spindles to come under fusimotor control and so their impulses no longer have access to consciousness. Under these circumstances, how is position sense generated, by an efference copy mechanism, or by reference to a body schema?
A second issue that arose from the observations of Allen et al. (2007) was that once arm muscles became active to support the load, there was no detectable increase in precision of the position signal (Fig. 2). Position errors and their standard errors were much the same as for a passive arm. There is a widely held view that once spindles come under fusimotor control, the position signal becomes more accurate (Paillard and Brouchon 1968; Adamovich et al. 1998; Fuentes and Bastian 2010; Bhanpuri et al. 2012, 2013). We believe that the apparent increase in proprioceptive acuity reported by others is the result of slack being present in the muscle and its spindles before loading or active movement. The slack is removed by the contractile activity. Such a misconception is a consequence of the fact that at the start of the experiment most experimenters do not routinely subject muscles to conditioning contractions, to put their spindles into a defined state. The observations of Winter et al. (2005) had shown for an unconditioned arm that loading arm muscles led to a reduction in position errors and their variability. Such an observation could be used to claim an increase in acuity of the position signal as a result of muscle activation. Yet once the muscles of both arms had been appropriately conditioned, such errors were no longer present (Fig. 2). Therefore, provided the relevant muscles of both arms have been conditioned by brief contractions, the data from thixotropic conditioning do not support the claim of an increase in the precision of the position signal between a passive and an active muscle. Further supporting evidence comes from animal experiments. Provided the muscle had been appropriately conditioned, responses of single primary endings of spindles were more sensitive to small movements of the passive muscle, compared with responses to the same movements in the presence of fusimotor activity (Wise et al. 1999).
Since in everyday activities we do not go about routinely conditioning our muscles to determine limb position, the common observation of an improvement in kinaesthetic acuity in a contracting muscle is likely to be correct. However, the fact that the mechanism has its origin in the thixotropic property of muscle, rather than being due to central processes, does impact our ideas about how kinaesthetic signals are generated.
There is one further consideration for observations like those of Fuentes and Bastian (2010). In those experiments, the position of the forearm and hand was indicated by moving a cursor, controlled by means of a joystick held in the other hand. So, this is not a matching task, where the subject moves their indicator arm to a position where sensation of its location matches sensations coming from the reference arm (Fig. 1). There is evidence that when the position of an arm is indicated by means of a pointer, muscle spindles play a lesser role than in the traditional forearm-matching task (Tsay et al. 2016). This is likely to influence the outcome of measurements of position sense.
A final consideration is that the operation of forward models in the generation of limb position sense is not universally accepted. In a finger-pointing task (Capaday et al. 2013; Darling et al. 2018), it was found that the proprioceptors themselves were able to provide accurate localisation information. It was not necessary to postulate the calculation of estimates of arm position from internal models beyond that provided by the peripheral signals. If vibration of a loaded arm does not produce kinaesthetic sensations and if the operation of forward models is disputed, how is the positional information generated when we move our loaded arm? We are certainly aware of its position throughout the movement. It has been proposed that stretch of muscles antagonist to the prime movers provides the position signal (Capaday and Cooke 1981, 1983; Inglis and Frank 1990).
To summarise, for the elbow joint the balance of evidence does not support an effort signal contributing to position sense. However, the situation seems to be different at the wrist. There, under certain circumstances, attempted efforts of about one-third of maximum are able to generate sensations of limb movement and changed position (Gandevia et al. 2006; Smith et al. 2009; Walsh et al. 2009). These differences in outcomes between the elbow and the wrist led subsequently to an additional series of experiments (Walsh et al. 2013). In the new experiments, a direct comparison was made between observations at the wrist and elbow, using identical methods of measurement. It was concluded that the contribution to position sense by central command signals concerned with generating the sense of effort differs between joints; contributions at the wrist are significant, while at the elbow they are small and insignificant. This is a rather unsatisfactory outcome for what must be considered a fundamental concept in sensorimotor control. It does raise the possibility that at joints other than the elbow, the increased effort required to move a limb after fatigue from exercise may contribute to the observed disturbance of position sense. However, at the present time evidence for such a contribution is lacking.
Position sense in low gravity
Effects of gravity on position sense have been treated here as another form of loading a limb. Studies carried out in weightless environments have reported a deterioration of kinaesthetic sensations (Lackner and DiZio 1992; Young et al. 1993; Roll et al. 1998). One suggestion for an explanation is the absence of gravity-based vestibular inputs, leading to a decreased vestibulospinal influence on muscle spindle sensitivity (Lackner and DiZio 1992). This proposal is based on the assumption that the spindle signal used to indicate limb position becomes more accurate during fusimotor activation. However, as discussed above, provided the muscle has been appropriately conditioned, position errors in a passive and an active muscle are not significantly different (Ansems et al. 2006; Allen et al. 2007). Nevertheless, if, as will be argued here, there is a greater propensity for the development of slack in spindles under conditions of weightlessness, reduced fusimotor activity will provide less opportunity for the removal of slack and therefore spindle sensitivity will remain low.
In a study by Bringoux et al. (2012), subjects performed arm-reaching movements towards predefined targets. In microgravity they undershot the target. When subjects were provided with elastic bands attached to the arm, this mimicked gravity-like torque at the shoulder joint. It allowed subjects in microgravity to be just as accurate in making their reaching movements as in normogravity. It was concluded that an important factor to account for the reduced proprioceptive performance in a gravity-free environment was the absence of gravity-induced joint torques (Saradjian et al. 2013).
Here, we would like to propose that the fall in position sense accuracy, in a gravity-free environment, has as its basis the influence of muscle thixotropy, similar to that described for the distribution of position errors in a relaxed, unconditioned arm (Winter et al. 2005). In a gravity-free environment, movement of the arm will be initiated by weak, brief contractions. Because of the absence of gravity, during most of the movement the arm muscles will remain passive. Whenever a limb is moved without a contraction of its muscles, the opportunity arises for the development of slack in muscle fibres and spindles. This can lead to a reduction in position sense acuity.
In a position-matching task at the elbow, signals from both arms are involved. This can be simply shown with thixotropic conditioning (Proske and Gandevia 2018). For each arm both antagonists at the elbow contribute positional information (Gilhodes et al. 1986). If a subject is trying to locate the positions of their arms relative to one another, to carry out fine manipulative tasks with their hands, the difference signals from the antagonists are compared between the arms, and when that difference is at a minimum, the brain assumes the arms to be aligned.
In a weightless environment, since there is no force of gravity acting on the arm, there will be little tonic activity in arm muscles, for a given posture. It means that any slack that develops in arm muscles and their spindles during movement is not readily removed and, with time, progressively more muscles become slack. As a result, spindle afferent responses to stretch are delayed and their responses at stretch onset are sluggish. For alignment of the positions of the arms, the difference in discharge mechanism will often not work. It means that precision in matching accuracy is reduced. In addition, vibration responses will be weak (Lackner and DiZio 1992), as is seen in normogravity in the presence of muscle slack (Gooey et al. 2000, Fig. 5). Only when a sustained external force is generated with, say, elastic bands attached to the arm (Bringoux et al. 2012) will muscles generate sufficient force to reduce slack and bring spindle responses back into their high sensitivity range.
Exercise and position sense at different joints
Returning to the subject of position sense and errors produced by exercise, more recently the work on the arms was extended to muscles acting at the knee (Givoni et al. 2007). In a study of knee extensors, it was found that both eccentric and concentric exercise led to falls in force from fatigue and this was accompanied by significant position errors. The direction of the errors suggested that subjects perceived their exercised muscles as longer than they actually were, that is, their knee was perceived as more flexed. This observation was consistent with results obtained at the forearm. Incidentally, the direction of the errors was the opposite to that expected if the increased effort from fatigue had contributed to the shift in position sense. A fatigued leg would have been expected to adopt a more extended position, where a larger vector of the force of gravity was acting, not, as was seen, a more flexed position.
At this point, putting all of the evidence so far gathered together, the single consistent point was that position errors were observed after exercise, be it concentric, eccentric or isometric, provided fatigue levels were sufficient, requiring a fall in force in the range 20–30% of maximum. There was no suggestion that the damaging effects of eccentric exercise led to any additional errors. More importantly, when position sense was measured at 24 h after eccentric exercise, at a time when force levels were still well below normal due to the damaging effects of the exercise, significant position errors could be demonstrated (Tsay et al. 2012). It meant that none of the other, short-term factors, commonly associated with fatigue from exercise, the accumulation of metabolites, stimulation of small muscle afferents in the group III and IV range or raised levels of activity by other afferents stimulated by the exercise, were involved in the disturbance to position sense. It is known that short-term effects of exercise are resolved by 2 h post-exercise (Smith and Newham 2007). Finally, none of the evidence supported the idea that an increase in effort sensation from fatigue after exercise was responsible for generating position errors.
The observation that both at the elbow and at the knee the exercised muscle felt longer, that is, the arm more extended, the knee more flexed, led to the proposal of a new hypothesis. Could this finding be generalised to all muscles? Did exercise lead to a widespread shift of position sense in the direction of muscle extension? In a new series of experiments, elbow extensors, rather than flexors, were exercised (Fig. 3). The hypothesis was that if, after exercise, the muscle was perceived as longer, for exercise of elbow extensors this should lead to errors in the direction of elbow flexion. In the event, exactly the opposite result was observed, subjects felt their arm was more extended after exercise of extensors, the same direction as after exercise of flexors (Allen et al. 2010). That is, to match the position of the exercised arm, the unexercised arm had to adopt a more extended position, where its elbow extensor muscles were shorter. So, after exercise of elbow flexors, the exercised muscles felt longer, while after exercise of elbow extensors they felt shorter. To test whether a similar result could be demonstrated at other joints, the knee flexors (hamstrings) were exercised. The result was similar to that at the elbow. After the exercise the knee was perceived as more flexed, the flexors shorter than before the exercise (Allen et al. 2010). This was the same direction as after exercise of knee extensors, perception of a more flexed knee (Givoni et al. 2007).

Exercising elbow flexors and extensors. Upper panel: exercise of elbow extensors. Subjects sat in a chair with the arm to be exercised in a flexed position, resting on a horizontal support. The hand grasped a handle that was attached to a cable which ran through a pulley to a weight. Subjects were asked to slowly extend the arm to raise the weight which was adjusted to be 30% MVC. Once the arm was fully extended, the weight was lowered again to its starting position by the experimenter, ready for the next extension movement. Redrawn from Allen et al. (2010). Lower panel: exercise of elbow flexors. Subjects sat with their extended arm resting on a support. The hand grasped a handle that was attached to a cable. The cable ran through a pulley to a weight. Subjects were asked to slowly flex their arm to raise the weight (30% MVC) until the forearm was vertical. The experimenter then lowered the weight again to the starting position, ready for the next flexion movement. Redrawn from Tsay et al. (2012). For both the exercise of flexors and of extensors it was necessary for the experimenter to return the weight to the starting position since, if the subject did it, they were obliged to carry out an eccentric contraction which would have risked confounding the effects of the exercise
These findings led to abandonment of any hypotheses concerned with influences of exercise on peripheral receptor function, given trends in opposite directions for the antagonists, both at the elbow and at the knee. The conclusion was reached that exercise effects on position sense did not arise in the body periphery, but were a consequence of central actions. This was not simply an effort-related effect and other explanations had to be sought. Since for elbow and knee flexors and extensors the exercise effects were similar, it posed the question, could these effects be non-specific, spreading across joints? To check the point, position sense was measured before and after fatigue from exercise of finger flexor muscles. This had no effect on position sense at the elbow and it was concluded that exercise effects were joint specific (Allen et al. 2010).
Another possibility considered was that the cumulative effects of the afferent traffic generated by the exercise were responsible for triggering the central changes. To test this, elbow flexors were subjected to 250 lightly loaded contractions which led to only a small amount of fatigue (6%), but normal levels of exercise-induced afferent traffic. Such light exercise was not followed by significant errors in position sense (Tsay et al. 2012). The experiment was then repeated, but the exercise consisted of a series of isometric contractions. The contractions were strong enough to produce significant fatigue (24%), but movement of the arm during the exercise was kept to a minimum. The outcome was significant position errors in the direction of extension, as had been seen before.
Putting all of the observations together, exercise effects on position sense were directly dependent on the level of muscle fatigue produced by the exercise. In the search for an explanation, it was considered that the trends at both the elbow and knee joints were in the direction of gravity, the arms extended, the knees flexed. Perhaps the exercise effects were some sort of protective response; as the exercising subject fatigues, they are less steady on their feet and more prone to falls. A possible strategy might be to anticipate the impact of a possible fall by a perceived flexion at the knees, getting the body closer to the ground and extension of the arms to help support the body should it fall. This is not a very satisfactory explanation and it remains for future experiments, perhaps studying other joints, or employing methods of brain stimulation, to reveal the meaning of the exercise-induced changes in position sense.
The current view is that position sense is generated centrally as a result of the influence, predominantly, of muscle spindle signals. It is believed that the maintained activity of spindles in a muscle is converted into a sensation of limb position; the longer the muscle, the higher is the spindle rate and, for elbow flexors, the more extended is the arm. The evidence for this is based on the illusion of displaced position and movement produced by muscle vibration, a stimulus to which spindles are highly sensitive (Goodwin et al. 1972). How can exercise produce a perceived change in position, which for one muscle group represents muscle lengthening, and for another muscle shortening? Assuming that our ideas about the generation of limb position sense are correct, the finding would imply a disconnect, centrally, in the conversion process of spindle discharges into position sense. If that is so, the effects of exercise represent the first known example of the uncoupling of the peripheral afferent input from its central transformation into a sensation. It suggests that the brain has the facility of overriding signals from spindles and be able to control sensations of position sense directly. Such a conclusion should be put to the test. Does vibration of elbow muscles after fatigue from exercise still produce the same illusions as for unexercised muscles, sensation of movement into extension during vibration of flexors and into flexion during vibration of extensors? Or will the sensations for the extensors go in the wrong direction? If vibration sensations no longer conform with predictions, one possible explanation is that the exercise fatigue acts to modify the body model (Longo and Haggard 2010), independently of the level of peripheral input. Such ideas are currently the subject of experiments.
Exercise and the sense of movement
There have been relatively few studies specifically addressing the effects of exercise on movement sensations (McCloskey 1973; Pedersen et al. 1999; Allen and Proske 2006). In the study by McCloskey, subjects’ elbow flexors of one arm were vibrated and subjects were required to indicate the size of the movement illusion with their other arm. Loading the arm slowed the perceived illusion. When subjects’ arm muscles were fatigued before loading the arm, this produced a further slowing of the movement sensation evoked by vibration, except for the condition where the fatigued arm did not support a load.
In a rather different experiment, the experimenter moved the subject’s reference forearm from a vertical position into extension and the subject was required to track the movement with their other, indicator arm (Allen and Proske 2006). Movement speeds of 10–50°s−1 were trialled. After fatigue from exercise of the indicator by 30% MVC, there was no significant change in the subject’s tracking accuracy, yet the same levels of fatigue produced significant errors in position sense. When the reference arm had its biceps vibrated during the tracking movement, subjects indicated with their other arm a significantly higher movement speed than had actually occurred. When the indicator arm was vibrated, the movement illusion was significantly slowed. Since vibration is a powerful stimulus for the primary endings of muscle spindles (Roll et al. 1989), these observations were taken in support of spindles being able to signal movements of the kind the subject was being asked to track. The fact that movement tracking was unaffected by fatigue was taken as evidence that unlike position sense, movement sense was not prone to disturbance by exercise. These findings were consistent with McCloskey’s observations for movement illusions in a fatigued, unloaded arm and it was concluded that under the conditions of this experiment, fatigue from exercise did not disturb movement sense.
The dynamic sensitivity of the primary endings of muscle spindles provides the basis for our movement sense. A simple clinical test of proprioceptive acuity is to impose small movements at a joint, say a finger joint, or toe joint, and ask the subject to report when they feel the movement and to indicate its direction (Hall and McCloskey 1983). For normal subjects, measurements of detection thresholds, made using controlled movements of different speeds over the range,1–0.1°s−1, lay between 0.2° and 1.6°, where the slower movements had the higher thresholds. If the movement was made sufficiently slow, at about 2°min−1 (Clark et al. 1986) the subject remained unaware that their limb had actually been moved. They eventually realised that the limb was no longer where it had previously been, but they were unaware of how it got to its new position. This is the sense of position and its threshold for the metacarpophalangeal joint is about 2.5° of displacement (Taylor and McCloskey 1992).
In another study of movement and position sense, measured dynamically, Cordo et al. (1994) rotated subjects’ passive arm in the direction of extension, at different velocities, presented in random order. The blindfolded subject had to indicate with their hand when the arm moved through a previously learnt angle. The data suggested that the central nervous system was able to extract both position and movement information under the dynamic conditions of an imposed movement.
Since in everyday activities, limb movements are invariably accompanied by muscle contraction, it raises the issue of movement detection in an active limb. This has been measured at the elbow joint. Over part of the movement range, during a flexor contraction, a tenfold reduction of movement detection threshold has been reported when compared with threshold values measured with a relaxed arm (Taylor and McCloskey, 1992). However, here the issue of thixotropy once again raises its ugly head! When the experiments were repeated, and threshold values were compared in a passive muscle, but one that had been conditioned with a brief contraction, and in an active muscle during a 15–20% MVC, threshold values were seen to be five times higher in the active muscle (Wise et al. 1998). These findings were supported by observations in animals which showed that responses of single, identified muscle spindles to small movements were larger in the passive, conditioned muscle, compared with responses to the same movements during stimulation of the spindle’s static or dynamic fusimotor supply (Wise et al. 1999). So, both for the detection of movements and for the precision of limb position sense, when these are compared between a passive and an active muscle, misleading outcomes can be arrived at for the passive muscle if this has not been put into a defined thixotropic state.
Conclusions
The evidence collected over the years has helped to dispel some commonly held misconceptions, such as the claimed increase in position sense acuity in a limb with contracting muscles, compared to the passive limb. Such a conclusion is a consequence of the fact that muscles are frequently not conditioned before the position sense measurements are made. Another important finding is that the size of the position errors after exercise is directly proportional to the fall in active muscle force from fatigue. The errors are restricted to the exercised muscle and do not spread to other muscles of the limb. The evidence does not support the view that damage from eccentric exercise contributes to the errors, other than through the fall in force. Furthermore, there is no evidence suggesting that the metabolic products of exercise, or stimulation of small-fibre afferents, contribute to the errors. Exercise with lightly loaded contractions is followed by too little fatigue to induce any position errors. By comparison, isometric exercise, where movement is minimised, will produce errors, provided sufficient fatigue results. This suggests that the afferent activity generated by the movements during exercise is not involved in the generation of errors. Finally, if we are correct, and position sense is generated by signals of muscle spindles, the distribution of errors across limbs argues in favour of a central decoupling of the spindle signal: position sense relation.
Two interesting points have emerged from this retrospective. One, that the reported poor proprioceptive acuity under conditions of weightlessness may be a consequence of the thixotropic property of the intrafusal muscle fibres of muscle spindles. Circumstances where muscles are subjected to large movements, with little accompanying contractile force, are likely to lead to development of slack in spindles and, as a result, reduced kinaesthetic sensibility. Secondly, the pattern of position errors after exercise does not conform to predictions based on peripheral receptor properties. It raises the question, can position signals be generated independently of peripheral inputs? This will be the subject of future experiments.
More generally, looking back over the years, I am embarrassed by the many wrong turns we took in our study of position sense and exercise. Nevertheless, I feel we have made progress, often in the face of rather different views held by others in the field. I think an important quality for the experimenter is to be humble enough to admit that his conclusions may not always be right.
I have been asked to summarise the findings about the effects of exercise fatigue on position sense. I find it difficult to do that, given the many gaps that remain in our understanding. There are questions relating to the central processing of proprioceptive information, accessing a body model and the combination of proprioceptive signals with other inputs, especially vision, to generate a detailed map of where our body parts are and whether they are moving or not. On the more practical side, it will be interesting to see whether the kinds of position errors described in this account can actually be implicated in sports injuries and whether such injuries can be prevented by limiting exercise fatigue. As always, when surveying the achievements of a period of research, it seems that at the end we are left with more questions to answer than at the start.
Have I enjoyed myself? There are few things in life which have given me more pleasure than framing a hypothesis, and in the actual experiment arriving at exactly the opposite result. Whenever that happens, I know that I am on the right track! Also, by the way, some quite thoughtful people have told me that we never really get to understanding ourselves. Well, one way to make a start is to study proprioception.
References
Adamovich SV, Berkinblit MB, Fookson O, Poizner H (1998) Pointing in 3D space to remembered targets. 1. Kinesthetic versus visual target presentation. J Neurophysiol 79:2833–2846
Allen TJ, Proske U (2006) Effect of muscle fatigue on the sense of limb position and movement. Exp Brain Res 170:30–38
Allen TJ, Ansems GE, Proske U (2007) Effects of muscle conditioning on position sense at the human forearm during loading or fatigue of elbow flexors and the role of the sense of effort. J Physiol 580:423–434
Allen TJ, Leung M, Proske U (2010) The effect of fatigue from exercise on human limb position sense. J Physiol 588(8):1369–1377
Allen TJ, Jones T, Tsay A, Morgan DL, Proske U (2018) Muscle damage produced by isometric contractions in human elbow flexors. J Appl Physiol 124:388–399
Ansems GE, Allen TJ, Proske U (2006) Position sense at the human forearm in the horizontal plane during loading and vibration of elbow muscles. J Physiol 576:445–455
Bastian HC (1880) The brain as an organ of the mind. Appleton, New York
Bhanpuri NH, Okamura AM, Bastian AJ (2012) Active force perception depends on cerebellar function. J Neuophysiol 107:1612–1620
Bhanpuri NH, Okamura AM, Bastian AJ (2013) Predictive modelling by the cerebellum improves proprioception. J Neurosci 33(36):14301–14306
Bringoux L, Blouin J, Coyle T, Ruget H, Mouchnino L (2012) Effect of gravity-like torque on goal-directed arm movements in microgravity. J Neurophysiol 107:2541–2548
Brockett C, Warren N, Gregory JE, Morgan DL, Proske U (1997) A comparison of the effects of concentric versus eccentric exercise on force and position sense at the human elbow joint. Brain Res 771:251–258
Capaday C, Cooke JD (1981) The effects of muscle vibration on the attainment of intended final position during voluntary human arm movements. Exp Brain Res 42:228–230
Capaday C, Cooke JD (1983) Vibration induced changes in movement-related EMG activity in humans. Exp Brain Res 52:139–146
Capaday C, Darling WG, Stanek K, Van Vreeswijk C (2013) Pointing to oneself: active versus passive proprioception revisited and implications for internal models of motor system function. Exp Brain Res 229:171–180
Clark FJ, Burgess RC, Chapin JW (1986) Proprioception with the proximal interphalangeal joint of the index finger. Evidence for a movement sense without a static-position sense. Brain 109(6):1195–1208
Cole J (1995) Pride and a daily marathon. MIT Press, Boston
Cole J (2007) The phenomenology of agency and intention in the face of paralysis and insentience. Phenom Cogn Sci 6:309–325
Collins DF, Refshauge KM, Todd G, Gandevia SC (2005) Cutaneous receptors contribute to kinaesthesia at the index finger, elbow and knee. J Neurophysiol 94:1699–1706
Cordo P, Carlton L, Bevan L, Carlton M, Kerr GK (1994) Proprioceptive coordination of movement sequences: role of velocity and position information. J Neurophysiol 71(5):1848–1861
Cullen KE (2004) Sensory signals during active versus passive movement. Curr Opin Neurobiol 14:698–706
Darling WG, Wall BM, Coffman CR, Capaday C (2018) Pointing to one’s moving hand: putative internal models do not contribute to proprioceptive acuity. Front Hum Neurosci 12(177):1–13
Day BL, Fitzpatrick RC (2005) Virtual head rotation reveals a process of route reconstruction from human vestibular signals. J Physiol 567(2):591–597
Ferrell WR, Smith A (1988) Position sense at the proximal interphalangeal joint of the human index finger. J Physiol 399:49–61
Forestier N, Teasdale N, Nougier V (2002) Alteration of the position sense at the ankle induced by muscular fatigue in humans. Med Sci Sports Exerc 34(1):117–122
Fuentes CT, Bastian A (2010) Where is your arm? Variations of proprioception across space and tasks. J Neurophysiol 103:164–171
Gandevia SC, Smith JL, Crawford M, Proske U, Taylor JL (2006) Motor commands contribute to human position sense. J Physiol 571:703–710
Gilhodes JC, Roll JP, Tardy-Gervet MF (1986) Perceptual and motor effects of agonist-antagonist muscle vibration in man. Exp Brain Res 61:395–402
Givoni NJ, Pham T, Allen TJ, Proske U (2007) The effect of quadriceps muscle fatigue on position matching at the knee. J Physiol 584:111–119
Gladden MH (1976) Structural features relative to the function of intrafusal muscle fibres in the cat. Prog Brain Res 44:51–59
Goodwin GM, McCloskey DI, Matthews PB (1972) The contribution of muscle afferents to kinaesthesia shown by vibration induced illusions of movement and by the effects of paralysing joint afferents. Brain 95:705–748
Gooey K, Bradfield O, Talbot J, Morgan DL, Proske U (2000) Effects of body orientation, load and vibration on sensing position and movement at the human elbow joint. Exp Brain Res 133:340–348
Gregory JE, Morgan DL, Proske U (1988) After-effects in the responses of cat muscle spindles and errors in limb position sense in man. J Neurophysiol 59:1220–1230
Gregory JE, Brockett CL, Morgan DL, Whitehead NP, Proske U (2002) Effects of eccentric muscle contractions on Golgi tendon organ responses to passive and active tension in the cat. J Physiol 538(1):209–218
Gregory JE, Morgan DL, Proske U (2004) Responses of muscle spindles following a series of eccentric contractions. Exp Brain Res 157:234–240
Hall LA, McCloskey DI (1983) Detection of movements imposed on finger, elbow and shoulder joints. J Physiol 335:519–533
Hill DK (1968) Tension due to interaction between the sliding filaments in resting striated muscle. The effect of stimulation. J Physiol 199:637–684
Inglis JT, Frank JS (1990) The effect of agonist/antagonist muscle vibration on human position sense. Exp Brain Res 81:573–580
Kawato M (1999) Internal models for motor control and trajectory planning. Curr Opin Neurobiol 9:718–727
Lackner JR, DiZio P (1992) Gravitoinertial force level affects the appreciation of limb position during muscle vibration. Brain Res 592:175–180
Lakie M, Walsh EG, Wright GW (1984) Resonance at the wrist demonstrated by the use of a torque motor: an instrumental analysis of muscle tone in man. J Physiol 353:265–285
Lattanzio P-J, Petrella RJ, Sproule JR, Fowler PJ (1997) Effects of fatigue on knee proprioception. Clin J Sport Med 7:22–27
Longo MR, Haggard P (2010) An implicit body representation underlying human position sense. Proc Natl Acad Sci USA 107:11727–11732
Matthews PBC (1972) Mammalian muscle receptors and their central actions. Edward Arnold, London
Matthews PBC (1982) Where does Sherrington’s “Muscular sense” originate? Muscles, joints, corollary discharges? Ann Rev Neurosci 5:189–218
McCloskey DI (1973) Differences between the senses of position and movement shown by the effects of loading and vibration of muscles in man. Brain Res 61:119–131
McCloskey DI (1981) Corollary discharges: motor commands and percepsion. In: Brookhart JM, Mountcastle VB (eds) Handbook of physiology, The nervous system. Motor control, sect 1, vol II, Pt 2, chap 32, American Physiological Society, Bethesda, pp 1415–1447
McCloskey DI, Cross MJ, Honner R, Potter EK (1983) Sensory effects of pulling or vibrating exposed tendons in man. Brain 106(Pt 1):21–37
Morgan DL, Prochazka A, Proske U (1984) The after-effects of stretch and fusimotor stimulation on the responses of primary endings of cat muscle spindles. J Physiol 356:465–477
Paillard J, Brouchon M (1968) Active and passive movements in the calibration of position sense. In: Freedman SJ (ed) The neuropsychology of spatially oriented behaviour, vol III, chap 3. Dorsey Press, Homewood 37–55
Pedersen JM, Ljubislavlevic M, Bergenheim M, Johansson H (1998) Alterations in information transmission in ensemble of primary muscle spindle afferents after muscle fatigue in heteronymous muscle. Neuroscience 84:953–959
Pedersen JM, Lonn J, Hellstrom F, Djupsjobacka M, Johansson H (1999) Localised muscle fatigue decreases the acuity of the movement sense in the human shoulder. Med Sci Sports Exerc 31(7):1047–1052
Proske U, Allen TJ (2019) The neural basis of the senses of effort, force and heaviness. Exp Brain Res 237:589–599
Proske U, Gandevia SC (2012) The proprioceptive senses: their roles in signalling body shape, body position and movement, and muscular force. Physiol Rev 92(4):1651–1697
Proske U, Gandevia SC (2018) Kinesthetic senses. Compr Physiol 8:1157–1183
Proske U, Morgan DL (2001) Muscle damage from eccentric exercise: mechanism, mechanical signs, adaptation and clinical applications. J Physiol 537:333–345
Proske U, Morgan DL, Gregory JE (1993) Thixotropy in skeletal muscle and in muscle spindles: a review. Prog Neurobiol 41(6):705–721
Proske U, Tsay A, Allen TJ (2014) Muscle thixotropy as a tool in the study of proprioception. Exp Brain Res 232:3397–3412
Ribeiro F, Mota J, Oliveira J (2007) Effect of exercise-induced fatigue on position sense of the knee in the elderly. Eur J Physiol 99:379–385
Roll JP, Vedel JP, Ribot E (1989) Alteration of proprioceptive messages induced by tendon vibration in man: a microneurographic study. Exp Brain Res 76:213–222
Roll R, Gilhodes JC, Roll JP, Popov K, Charade O, Gurfinkel V (1998) Proprioceptive information processing in weightlessness. Exp Brain Res 122:393–402
Saradjian AH, Tremblay L, Perrier J, Blouin J, Mouchnino L (2013) Cortical facilitation of proprioceptive inputs related to gravitational balance constraints during step preparation. J Neurophysiol 110:397–407
Saxton JM, Clarkson PM, James R, Miles M, Westerfer M, Clark S, Donnelly AE (1995) Neuromuscular dysfunction following eccentric exercise. Med Sci Sports Exerc 27:1185–1193
Sharpe MH, Miles TS (1993) Position sense at the elbow after fatiguing contractions. Exp Brain Res 94:179–182
Sittig AC, Denier van der Gon JJ, Gielen CC (1985) Separate control of arm position and velocity demonstrated by vibration of muscle tendon in man. Exp Brain Res 60:445–453
Skinner HB, Wyatt MP, Hodgdon JA, Conard DW, Barrack RL (1986) Effect of fatigue on joint position sense of the knee. J Orthop Res 4:112–118
Smith ICH, Newham DJ (2007) Fatigue and functional performance of human biceps muscle following concentric or eccentric contractions. J Appl Physiol 102:207–213
Smith JL, Cawford M, Proske U, Taylor JL, Gandevia SC (2009) Signals of motor command bias joint position sense in the presence of feedback from proprioceptors. J Appl Physiol 106:950–958
Taylor JL, McCloskey DI (1992) Detection of slow movements imposed at the elbow during active flexion in man. J Physiol 457:503–513
Tsay A, Allen TJ, Leung M, Proske U (2012) The fall in force after exercise disturbs position sense at the human forearm. Exp Brain Res 222:415–425
Tsay A, Savage G, Allen TJ, Proske U (2014) Limb position sense, proprioceptive drift and muscle thixotropy at the human elbow joint. J Physiol 592:2679–2694
Tsay A, Giummarra MJ, Allen TJ, Proske U (2016) The sensory origins of human position sense. J Physiol 594:1037–1049
Vallbo AB (1971) Muscle spindle responses at the onset of isometric voluntary contractions in man. Time difference between fusimotor and skeletomotor effects. J Physiol 218:405–431
Vallbo AB (1974) Human muscle spindle discharge during isometric voluntary contractions. Amplitude relations between spindle frequency and torque. Acta Physiol Scand 90:319–336
Von Holst H, Mittelstaedt H (1950) The reafference principle. In: Selected papers of Erich von Holst. “The behavioural physiology of animals and man”. (trans: German by Martin R, 1973), Methuen, London pp 139–173
Walsh LD, Hesse CW, Morgan DL, Proske U (2004) Human forearm position sense after fatigue of elbow flexor muscles. J Physiol 558:705–715
Walsh LD, Allen TJ, Gandevia SC, Proske U (2006) Effect of eccentric exercise on position sense at the human forearm in different postures. J Appl Physiol 100:1109–1116
Walsh LD, Smith JL, Gandevia SC, Taylor JL (2009) The combined effect of muscle contraction history and motor commands on human position sense. Exp Brain Res 195:603–610
Walsh LD, Proske U, Allen TJ, Gandevia SC (2013) The contribution of motor commands to position sense differs between elbow and wrist. J Physiol 591:6103–6114
Winter JA, Allen TJ, Proske U (2005) Muscle spindle signals combine with the sense of effort to indicate limb position. J Physiol 568:1035–1046
Wise AK, Gregory JE, Proske U (1998) Detection of movements of the human forearm during and after co-contractions of muscles acting at the elbow joint. J Physiol 508(1):325–330
Wise AK, Gregory JE, Proske U (1999) The responses of muscle spindles to small, slow movements in passive muscle and during fusimotor activity. Brain Res 821:87–94
Wolpert DM, Ghahramani Z, Jordan MI (1995) An internal model for sensorimotor integration. Science 269:1880–1882
Worringham CJ, Stelmach GE (1985) The contribution of gravitational torques to limb position sense. Exp Brain Res 61:38–42
Young LR, Oman CM, Merfeld D, Watt D, Roy S, De Luca C, Blackwill D, Christie J, Grolean N, Jackson DK, Low G, Modestino S, Mayer W (1993) Spatial orientation and posture during and following weightlessness: human experiments on Spacelab life sciences. J Vestib Res 3:231–239
Acknowledgements
I would like to thank Trevor Allen for his help with preparation of the manuscript and illustrations, Florian Monjo for his comments on parts of the text, and all of my collaborators over the years who contributed to the work, most of whose names appear as co-authors in the published papers.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Proske, U. Exercise, fatigue and proprioception: a retrospective. Exp Brain Res 237, 2447–2459 (2019). https://doi.org/10.1007/s00221-019-05634-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-019-05634-8