
Abstract
We examined whether task-dependent modulation was evident in a motor learning paradigm. Subjects performed reaching movements before, during, and after exposure to a novel force perturbation while adopting either a spatial goal, "continue towards the target", or an effort goal, "keep your effort profile the same". Before the perturbation, the hand trajectories were moderately straight and accurate regardless of the task. However, during and immediately after the perturbation, the reaches exhibited unambiguous task-dependent differences in both the initial and terminal periods of the reach. With the spatial goal, subjects showed terminal compensations to the force-induced displacements indicative of feedback control. In addition, feedforward control was evident in the smaller path deviations with continued exposure and the initial path aftereffects when the perturbation was removed. In contrast, when adopting an effort goal, subjects showed large and chronically deviated endpoints from the perturbation indicating an absence of feedback compensation. They also showed no feedforward adaptation during repeated exposure or visible aftereffects when the perturbation was removed. Therefore, both feedforward and feedback control mechanisms show task-dependent modulation in a motor learning paradigm.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Task-dependent modulation is a common feature of motor behavior under non-learning conditions (Evarts and Granit 1976; Prochazka et al. 1985; Stein and Capaday 1988; Zehr and Stein 1999). Accordingly, different reflex responses may be evoked by the same force perturbation depending on the nature of the task. For example, the reflex pattern of compensation to an imposed wrist rotation depends on whether subjects are instructed to supinate or pronate their wrist (Evarts and Granit 1976). Similarly, when subjects adopt a positional goal they develop larger compensatory forces to an opposing load than when they match a force reference, even when the load perturbation is below perceptual threshold (Colebatch and McCloskey 1987). Such task dependency has been shown for a variety of behaviors—locomotion, posture control, and directed forelimb movements—and reflects several neural mechanisms including fusimotor set, pre-synaptic inhibition, and long-latency reflexes. Therefore, task-dependent modulation is characteristic of motor behavior under non-learning conditions.
Task-dependent modulation may also be a property of motor learning. Specifically, task dependency may be evident in the force adaptation paradigms commonly utilized to study the control of reaching movements. Such paradigms examine the patterns of movement disruption and adaptation to a novel movement-dependent force (Lackner and DiZio 1994; Shadmehr and Mussa-Ivaldi 1994; Goodbody and Wolpert 1998; Sainburg et al. 1999). For example, introducing a velocity-dependent force during reaching initially results in large path deviations from a baseline movement pattern since the additional load is unexpected. However, with repeated practice subjects develop an appropriate feedforward motor command that is calibrated to the expected force perturbation. This feedforward adaptation restores their baseline reaching trajectory and is also visible as initial trajectory errors upon removing the perturbation. In addition, feedback compensations to on-line deviations from the intended movement pattern are evident as terminal curvatures that partially or fully attain the target endpoint. Although these patterns of feedforward adaptation and feedback compensation have been consistently replicated, it is unknown whether they reflect fixed or task-dependent processes since all the studies utilize largely similar instructions emphasizing spatial accuracy.
We examined this possibility by instructing subjects to adopt categorically distinct voluntary goals while perturbing their reaches with a velocity-dependent force. For one session, subjects were given a spatial goal in directing their arm, "...continue towards the target...". In a different session, subjects were given an effort goal, "...keep your effort profile the same...". Effort was described to the subjects as the experience of how hard one tries, and it was reiterated that the goal was inherently non-spatial. Under non-learning conditions these two voluntary goals are perceptually distinct and are considerably independent of each other. While motor outflow can lead to sensory biases (Watson et al. 1984; Wolpert et al. 1995), the spatial perception of one's limb is dominated by afferent sources including somatosensation and vision (Rothwell et al. 1982; Matthews 1988; Cole and Sedgwick 1992; Gandevia and Burke 1992; Fourneret 2001). In contrast, effort is the nominal correlate of efferent copy (McCloskey et al. 1974; Roland and Ladegaard-Pederson 1977; Gandevia 1982; McCloskey 1983; Burgess and Jones 1997) and is, hence, dominated by motor outflow. Therefore, we determined whether task-dependent differences were evident under conditions known to induce motor learning.
Materials and methods
Subjects
Eight subjects (all male, 25–32 years) were recruited from the Neuroscience Graduate Program at Brandeis University. All were right-handed, neurologically normal, fluent English speakers, and naive to the purpose of the experiment. After giving informed consent to a protocol approved by a Brandeis Human Subjects Committee, they participated in two 45-min sessions separated by 7–9 days and were compensated for their time.
Apparatus
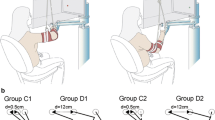
Subjects sat at a table while reaching with a PHANToM device (PHANToM Haptic Interfaces, Sensable Devices, Cambridge, MA). This manipulandum is light-weight, mobile in three dimensions, and was programmed to produce force at right angles to the hand's velocity ([0, 10; −10, 0] N·m/s) applied to a custom-molded cuff that encompassed the metacarpal region of the subjects' hand without interfering with the fingers. An Optotrack 3020 (Northern Digital, Waterloo, Ontario) motion detection system tracked an infrared emitter attached to the tip of the subject's index finger at 100 Hz.
Procedure
Subjects reached forward to a small target LED embedded in the table-top, 15 cm from the start position, and aligned to the sagittal plane of their right shoulder; starting and end arm configurations were not controlled except to allow a comfortable movement range. The reaches were self-initiated, at a self-selected speed, and completed with visual feedback in a well-lit room. Subjects were encouraged to choose a comfortable speed that could be maintained throughout the experiment similar to the natural act of picking up a pencil.
They were instructed to adopt a different goal—either spatial or effort—for their two sessions. For the spatial goal subjects were told, "if you feel you are making a mistake, continue towards the target as best you can." It was emphasized that subjects could make a conscious "reactive" correction but should not attempt an "anticipatory" correction. For the effort goal, subjects were told that effort was synonymous with "how hard you try" and it was reiterated that the goal was inherently non-spatial. They were required to attend to their "effort profile" during several practice reaches and were told to adopt that effort profile for the duration of the experiment regardless of the spatial accuracy of their reaches. "If you feel you are making a mistake, I do not want you to consciously intervene. Rather keep your effort profile the same while passively observing any spatial changes."
Design and analysis
Each subject participated in two sessions. The sessions differed only in their instructions and were counterbalanced for order across subjects. During each session, subjects would reach in blocks of eight trials while the field was either on or off. Subjects were not informed of a change from a force field block to a no-force/null field block, or vice versa. The number of blocks with the force field condition increased throughout the experiment from one to two to four adjacent blocks, and were always separated by two blocks of the null field condition for a total of 120 reaches (Fig. 1).

Outline of experiment. The baseline comprises the mean of all reaches in the null blocks surrounded by a rectangle. The initial effect of the force field comprises the mean of three reaches occurring on the transition (1st reach) from a null block to a force field block. The reaches of the last black with the force field were also analyzed and are indicated by an oval. The aftereffect of the force field reaches comprises the mean of three reaches occurring on the transition (1st reach) from a force field block to a null block
Four categories of reaches within the experiment were identified and analyzed: baseline, initial effect, final block, and aftereffect. The reaches within each category were combined and averaged for each subject. The reaches comprising the baseline were drawn from null blocks before the force field block and sufficiently after exposure the force field block (second block following the aftereffect) to ensure re-adaptation. The reaches for the initial effect of the force field included the first reach with the force field after a null block; each subject had three reaches in this category. The reaches of the final block with the force field (when rapid adaptation had presumably reached asymptote) were also analyzed. Lastly, the reaches for the aftereffect of the force field included the first reach with the null condition after a force field; each subject had three reaches in this category.
The lateral position of the hand measured at the maximum forward velocity and at the endpoint indicate the qualitative features of each reach. The start and end of a movement were defined as 5% of the peak tangential velocity. A 2×4 repeated measures ANOVA (two instructions, four categories of reaches) was analyzed to determine a main effect of instruction and force field, and interaction for the two measures. Paired t-tests were considered significant at p<.05.
Results
All eight subjects showed the same qualitative movements during the spatial instruction. Six subjects showed clear differences between the spatial and effort goal conditions while two subjects showed the same qualitative behavior during both goal conditions. One of the outlier subjects afterwards said he was unwilling to adopt a constant effort profile and had instead adopted a spatial goal throughout both experiments. We suspect the second subject was unwilling or unable to adopt a constant effort and also adopted a spatial goal throughout. This would be consistent with his voiced preference for the spatial goal and that of the other subjects as well. We describe the stable trajectory features and differences in learning for the six remaining subjects.
Baseline
Prior to the force perturbation subjects showed the same reaching pattern regardless of instruction (Fig. 2). The hand trajectories had low curvature, either left or rightwards; the maximum lateral deviation averaged 5 mm, less than 4% of the movement amplitude. The movement endpoints were accurate with low variability; the endpoint bias and standard deviation over all null trials was 1 ± 3 mm and 1.3 ± 4 mm for the spatial and effort instruction, respectively.

Reaches with and without the force field. The SPATIAL and EFFORT panels indicate when subjects adopted the spatial or effort goals, respectively. Each panel depicts the baseline movement pattern, the initial effect of the force field, the final block with the force field, and the aftereffect of the force field. Circles indicate trajectories without the force field, and triangles indicate trajectories with the force field
The temporal characteristics of the reaches were also similar with smooth and single-peaked velocity profiles. The maximum forward velocities (420 ± 20 mm/s SEM and 400 ± 30 mm/s SEM) and movement times (640 ± 40 ms SEM and 650 ± 50 ms SEM) showed considerable overlap between the spatial and effort instructions.
During force field
During and after the additional force field the movement trajectories were distorted from baseline. Repeated measures ANOVAs demonstrated a main effect of the force field at the peak velocity (F (3,15) = 78.06, p<.0001) and the movement endpoint (F (3,15) = 17.15, p<.0001). In addition, there was a significant main effect of instruction (peak velocity, F (1,5) = 9.76, p<.05; endpoint, F (1,5) = 25.31, p<.005) across the force conditions. Lastly, the interaction between the force field and the instruction was significant indicating a specific effect of instruction depending on the force field period (peak velocity, F (3,15) = 9.96, p<.001; endpoint, F (3,15) = 15.43, p<.0001). These relations were further explored with paired t-tests testing changes from baseline.
Force field with spatial instruction
Introducing the velocity-dependent force significantly perturbed the reaching movement with the lateral deviations from baseline achieving statistical significance at the peak velocity (12.3 ± .3 mm SEM, p<.0001) (Fig. 2). However, these early lateral deviations were followed by a return curvature towards the baseline so the endpoints did not significantly differ from baseline (endpoint: 8.1 ± 8 mm SEM, p>.35).
As subjects continued to reach with the force field their movements showed similar peak velocities to baseline (410 ± 20 mm/s SEM and 420 ± 20 mm/s SEM) with moderately increased movement times (700 ± 40 ms SEM and 640 ± 40 ms SEM). During this period subjects increasingly countered the velocity-dependent force (Fig. 2). The decrease in displacement at the peak velocity achieved significance (p<.05) although subjects did not fully adapt their path accuracy. Lastly, throughout the force field period the movement endpoints were relatively conserved; over all perturbation trials the endpoints had a lateral bias and standard deviation of 1.2 ± 6.5 mm.
Force field with effort instruction
With the effort instruction, the hand trajectories became deviated by the unexpected force early in the movement. These deviations continued to increase throughout the movement resulting in large endpoint deviations (Fig. 2). This pattern was present in the initial effect for both measures: peak velocity: 16.3 ± 2.5 mm SEM, p<.0001; endpoint: 60 ± 10.1 mm SEM, p<.005.
In the force field conditions subjects tended to slow their forward hand movements (350 ± 30 mm/s SEM and 400 ± 30 mm/s SEM) and extend their movement times (720 ± 60 ms SEM and 650 ± 50 ms SEM). However, this did not decrease their lateral deviations from baseline. Rather, the initial pattern was retained and tended to increase over time. Over all perturbation trials the hand endpoints had a lateral bias of 90 ± 40 mm STD, approximately 60% of the movement amplitude; the increase only achieved significance at the peak velocity (p<.01) because of the large variability.
After force field
Spatial aftereffect
After removing the force field, subjects misreached in a pattern roughly mirroring their initial effect with the force field (Fig. 2). Significant lateral deviations from baseline were measured at the peak velocity (−9 ± 1.25 mm SEM, p<.0005). However, these lateral deviations decreased as the arm decelerated and did not achieve statistical significance by the endpoint (−.5 ± .9 mm SEM, p>.5).
Effort aftereffect
After removing the force field, subjects displayed trajectories similar to baseline. They did not significantly misreach at early or final portions of the movement: lateral deviation at peak velocity (−.7 ± 1.9 mm SEM, p>.7), and endpoint (2.7 ± 1.4 SEM, p>.15). Thus, subjects did not display any significant changes from baseline.
Discussion
We examined task-dependent behavior to a novel movement-dependent force perturbation. Subjects either adopted a spatial goal, "...continue towards the target...", or an effort goal, "...keep your effort profile the same...". These two instructions had no measurable effect on reaching movements prior to the imposition of a velocity-dependent force as subjects reached in straight and accurate trajectories regardless. However, upon introducing the novel force the reaching movements diverged. With the spatial goal, subjects showed compensatory feedback behavior to the initial path deviations induced by the force perturbation. In addition, subjects exhibited opposing aftereffects when the perturbation was unexpectedly removed indicating feedforward adaptation had occurred. These features of feedback and feedforward control are similar to previous reports employing instructions emphasizing spatial accuracy (Lackner and DiZio 1994; Shadmehr and Mussa-Ivaldi 1994; Goodbody and Wolpert 1998; Sainburg et al. 1999). In contrast, when adopting the effort goal, subjects displayed large and chronically deviated endpoints and no significant aftereffects when the novel force was removed without notice. Such task-dependent effects represent a new experimental finding.
It was unknown whether subjects acting under an effort instruction would show negligible or significant endpoint deviations upon imposing the velocity-dependent force. We found the perturbed trajectories were monotonically deviated with no visible feedback compensatory curvature and a mean final deviation 60% of the movement's amplitude. Large endpoint biases are consistent with previous reports examining constant effort behavior under static force conditions. When subjects produce a constant effort their output primarily correlates with a constant force both under isometric conditions (Burgess et al. 1995) and during imposed eccentric and concentric movements (Burgess et al. 2002). Therefore, position stability is largely absent under a fixed effort task as was also found here with exposure to a novel velocity-dependent force.
It was also unknown whether subjects acting under an effort instruction would show an attenuated aftereffect opposite the transient force, an assistive aftereffect in the direction of the force, or no aftereffect. Each of these possible outcomes could be reasonably fit within the existing literature. In fact, when the force field was removed without notice, subjects did not show a systematic aftereffect for any of the measures used. That no significant directional effect was observed strongly qualifies the putative primacy of efference copy for feedforward motor adaptation (Diedrichsen et al. 2003). Such signals are a copy of the motor command and, ostensively, provide the input to adaptive forward models that predict the feedback signal (Jordan and Rummelhart 1989). Although our subjects retained the predicted sensory feedback via efference copy and had veridical feedback via proprioception and vision we found this was insufficient to induce adaptation. Rather adaptation to the novel force perturbation required a high-level spatial goal as well as efference copy signals.
It should be noted that subjects uniformly expressed a strong preference to adopt a spatial goal rather than a constant effort profile, and one subject expressed an unwillingness to adopt a constant effort profile. Consequently, a constant effort task should not be considered typical but as an existence proof for task-dependent behavior in a motor learning paradigm. In addition, it is unclear whether the task-dependent modulation results from the differential engagement of high-level error signals or the selective shunting of lower order processes. Adopting a non-spatial effort goal could be equivalent to suppressing a spatially sensitive reflex with its own plasticity mechanisms. Contrariwise, the spatial sensitivity and error signals that drive motor learning might be primarily restricted to higher-level mechanisms. Further experiments are required to make this determination. We conclude that the feedback and feedforward processes that counter movement-dependent force perturbations display task-dependent changes similar to previous observations in non-learning conditions.
References
Burgess PR, Jones LF (1997) Perceptions of effort and heaviness during fatigue and during the size-weight illusion. Somatosens Mot Res 14:189–202
Burgess PR, Cooper TA, Gottlieb GL, Latash ML (1995) The sense of effort and two models of single-joint motor control. Somatosens Mot Res 12:343–358
Burgess PR, Jones LF, Buhler CF, Dewald JPA, Zhang L-Q, Rymer WZ (2002) Muscular torque generation during imposed joint rotation: torque-angle relationships when the subject's only goal is to make a constant effort. Somatosens Mot Res 19:327–340
Cole J, Sedgwick EM (1992) The perceptions of force and of movement in a man without large myelinated sensory afferents below the neck. J Physiol 449:503–515
Colebatch JG, McCloskey DI (1987) Maintenance of constant arm position or force: reflex and volitional components in man. J Physiol 386:247–261
Diedrichsen J, Verstynen T, Hon A, Lehman SL, Ivry RB (2003) Anticipatory adjustments in the unloading task: is an efference copy necessary for learning? Exp Brain Res 148:272–276
DiZio P, Lackner JR (1995) Motor adaptation to Coriolis force perturbations of reaching movements: endpoint but not trajectory adaptation transfers to the nonexposed arm. J Neurophysiol 74:1787–1792
Evarts E, Granit R (1976) Relations of reflexes and intended movements. Prog Brain Res 44:1–14
Fourneret P, Paillard J, Lamarre Y, Cole J, Jeannerod M (2002) Lack of conscious recognition of one's own actions in a haptically deafferented patient. Neuroreport 13:541–547
Gandevia SC (1982) The perception of motor commands or effort during muscular paralysis. Brain 105:151–159
Gandevia SC, Burke D (1992) Does the nervous system depend on kinesthetic information to control natural limb movements? Behav Brain Sci 12–30
Goodbody S, Wolpert DM (1998) Temporal and amplitude generalization in motor learning. J Neurophysiol 79:1825–1838
Jordan MI, Rumelhart DE (1992) Forward models: supervised learning with a distal teacher. Cog Sci 16:307–354
Lackner JR, DiZio P (1994) Rapid adaptation to Coriolis force perturbations of arm trajectory. J Neurophysiol 72:299–313
Matthews PBC (1988) Proprioceptors and their contribution to somatosensory mapping: complex messages require complex processing. Can J Physiol Pharmacol 66:430–438
McCloskey DI (1983) Corollary discharges: motor commands and perception. In: Mouncastle V (ed) Handbook of physiology, pp 1415–1446
McCloskey DI, Ebeling P, Goodwin GM (1974) Estimation of weights and tensions and apparent involvement of a "sense of effort". Exp Neurol 42:220–232
Prochazka A, Hulliger M, Zangger P, Appenteng K (1985) "Fusimotor set": new evidence for alpha-independent control of gamma-motoneurons during movement in the awake cat. Brain Res 339:136–140
Roland PE, Ladegaard-Pedersen H (1977) A quantitative analysis of sensations of tension and of kinaesthesia in man: evidence for a peripherally originating muscular sense and for a sense of effort. Brain 100:671–692
Rothwell JC, Traub MM, Day BL, Obeso JA, Thomas PK, Marsden CD (1982) Manual motor performance in a deafferented man. Brain 105:515–542
Sainburg RL, Ghez C, Kalakanis D (1999) Intersegmental dynamics are controlled by sequential anticipatory, error correction, and postural mechanisms. J Neurophysiol 81:1045–1056
Shadmehr M, Muss-Ivaldi FA (1994) Adaptive representation of dynamics during learning of a motor task. J Neurosci 14:3208–3224
Stein RB, Capaday C (1988) The modulation of human reflexes during functional motor tasks. Trends Neurosci 11:328–332
Watson JD, Colebatch JG, McCloskey DI (1984) Effects of externally imposed elastic loads on the ability to estimate position and force. Behav Brain Res 13:267–271
Wolpert DM, Ghahramani Z, Jordan M (1995) An internal model for sensorimotor integration. Science 269:1880–1882
Zehr EP, Stein RB (1999) What functions do reflexes serve during human locomotion? Prog Neurobiol 58:185–205
Acknowledgement
This research was supported by National Aeronautics and Space Administration grants: NA69–1263; NA69–1483.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Kurtzer, I., DiZio, P. & Lackner, J. Task-dependent motor learning. Exp Brain Res 153, 128–132 (2003). https://doi.org/10.1007/s00221-003-1632-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-003-1632-0