
Abstract
Human movements are remarkably adaptive. We are capable of completing movements in a novel visuomotor environment with similar accuracy to those performed in a typical environment. In the current study, we examined if the control processes underlying movements under typical conditions were different from those underlying novel visuomotor conditions. 16 participants were divided into two groups, one receiving continuous visual feedback during all reaches (CF), and the other receiving terminal feedback regarding movement endpoint (TF). Participants trained in a virtual environment by completing 150 reaches to three targets when (1) a cursor accurately represented their hand motion (i.e., typical environment) and (2) a cursor was rotated 45° clockwise relative to their hand motion (i.e., novel environment). Analyses of within-trial measures across 150 reaching trials revealed that participants were able to demonstrate similar movement outcomes (i.e., movement time and angular errors) regardless of visual feedback or reaching environment by the end of reach training. Furthermore, a reduction in variability across several measures (i.e., reaction time, movement time, time after peak velocity, and jerk score) over time showed that participants improved the consistency of their movements in both reaching environments. However, participants took more time and were less consistent in the timing of initiating their movements when reaching in a novel environment compared to reaching in a typical environment, even at the end of training. As well, angular error variability at different proportions of the movement trajectory was consistently greater when reaching in a novel environment across trials and within a trial. Together, the results suggest a greater contribution of offline control processes and less effective online corrective processes when reaching in a novel environment compared to when reaching in a typical environment.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Goal-directed actions are a critical part of everyday life. Simple actions, such as reaching for a pen, become well learned over time and are eventually performed with little thought or effort. As we become proficient and well versed in our daily movements, we also gain the ability to adapt these well-learned actions to both internal and external (environmental) changes (e.g., growth, disease, changes in lighting conditions, etc.). For example, several studies have demonstrated visuomotor adaptation following the introduction of altered visual feedback via prism goggles (Clower and Boussaoud 2000; Hay and Pick 1966; Redding and Wallace 2006), or within virtual reality environments in which a cursor misrepresents the position of one’s hand on a screen (Hinder et al. 2010; Krakauer et al. 1999; Maksimovic and Cressman 2018; Shabbott and Sainburg 2010; Tseng et al. 2007).
In a typical, well-experienced environment, vision and proprioception provide veridical representations of the hand’s location in relation to the desired target location (Smeets et al. 2006). In general, this results in an accurate reach. When reaching in a novel environment, such as within a virtual reality environment in which the cursor’s trajectory is rotated relative to the hand’s trajectory, the relationship between visual and proprioceptive information and the required motor commands can be unfamiliar and unpredictable. Upon initial exposure to rotated visual feedback of the hand’s trajectory, seen hand paths deviate from the planned trajectory, resulting in a visual error between the seen hand’s location (i.e., cursor) and the desired target location (Shabbott and Sainburg 2010; Tseng et al. 2007; Wolpert and Kawato 1998). With training, movements are adapted in response to the altered visual feedback of the hand so that the cursor once again lands on the target as in the typical environment. This adaptation develops quickly, in as little as 20–30 trials, such that reaching errors in movement direction and endpoint position return to similar levels as observed prior to the introduction of the rotation (i.e., baseline) (Krakauer et al. 2000; Sainburg and Wang 2002; Yamamoto et al. 2006; Zbib et al. 2016).
Limited attention has been given to the kinematics (and hence control processes) underlying movements performed in a novel environment compared to movements completed in a typical environment. Recent work by Fernandez-Ruiz et al. (2011) and Simon and Bock (2016) examining visuomotor adaptation did include analyses related to performance variables, such as accuracy, response times and total movement duration, however, their primary focus was still on movement outcome. In these studies participants performed reaching movements in a novel virtual environment where a 60° counter clockwise (CCW) rotation was present (Fernandez-Ruiz et al. 2011) or under 60° and 75° cursor rotations (Simon and Bock 2016). Using these large cursor rotations, Simon and Bock (2016) showed that that the rate of adaptation (i.e., reducing angular errors) depended on the number of trials performed and not on movement duration (Simon and Bock 2016). Additionally, Fernandez-Ruiz et al. (2011) showed that reaching with a rotated cursor was associated with increased response initiation times, which the authors attributed to participants engaging in strategic control (i.e., mental rotation; Fernandez-Ruiz et al. 2011). While these studies provide insight into the temporal characteristics of adapted movements, they do not speak to whether the control processes differ when reaching in a novel versus typical environment, and whether these control processes change over time.
Movements can be controlled online, using any available information to correct an ongoing movement, or they can be amended offline on a trial-by-trial basis, making use of information gathered from previous movements to optimize performance on subsequent trials. Online control processes typically occur near the end of the movement, after there has been sufficient time to recognize and correct for errors (Elliott et al. 2001; Jeannerod 1986; Meyer et al. 1988; Woodworth 1899). However, online adjustments can also arise early in a trajectory through the comparison of expected-to-actual sensory consequences of the movement (Desmurget and Grafton 2000; Elliott et al. 1991; Grierson and Elliott 2008; Scott 2016). Offline control occurs prior to movement onset, and involves using prior information regarding the outcome of previously completed movements in the planning of an upcoming movement (Elliott and Allard 1985; Elliott et al. 2004; Hansen et al. 2006; Khan et al. 2002, 2003; Zelaznik et al. 1983).
The goal of the current study was to determine how adapted movements are controlled relative to reaches performed in a typical environment by establishing the contributions of online and offline control processes underlying reaching movements performed in a novel visuomotor environment. Kinematic variables, previously used to characterize the contributions of online and offline control in well-learned movements (de Grosbois and Tremblay 2016, 2018; Elliott et al. 1999, 2001, 2010, 2017; Grierson and Elliott 2008, 2009; Khan et al. 2006), were compared between movements performed in a typical environment (i.e., aligned cursor) and movements performed in a novel visuomotor environment (i.e., rotated cursor). To promote the use of online and offline control processes across the two reaching environments, the availability of visual information was manipulated (Bernier et al. 2006; Cheng et al. 2008; Gaveau et al. 2014; Heath 2005; Khan et al. 2003, 2006; Tremblay et al. 2013; Walsh et al. 2009). Specifically, participants performed movements with either continuous visual feedback [i.e., the cursor was present throughout the duration of the movement (CF)] or terminal visual feedback [i.e., the cursor was present only once the movement was terminated (TF)]. We hypothesized that training with the visuomotor rotation would quickly lead to visuomotor adaptation, perhaps through online corrective processes, such that reaching with an aligned and rotated cursor would achieve similar performance outcomes (e.g., endpoint accuracy). However, we expected differences in kinematic characteristics across reaching environments. Specifically, given that participants have been suggested to engage in strategic control when reaching in a novel visuomotor environment (Fernandez-Ruiz et al. 2011), we expected a larger contribution of offline control processes when reaching with a rotated cursor compared to reaching with an aligned cursor throughout training. A greater contribution of offline control processes would be evident through increased reaction time (planning) and greater error variability at different proportions of the movement trajectory. These results would be reflective of individuals being able to achieve the overall task objective of reaching the target, but adopting different control processes depending on their experience in the reaching environment.
Method
Participants
16 young adults (7 males, M = 23 years of age) were recruited from the University of Ottawa to participate in this experiment. Participants were naïve to the purpose of the experiment and free to withdraw at any point in the experiment without consequence. Informed consent was obtained followed by a brief handedness questionnaire [Edinburg handedness inventory (Oldfield 1971)]. According to the handedness questionnaire, all participants were right handed, M = 80.7, range 60–100. As well, participants had normal (n = 11) or corrected-to-normal vision (n = 5) with no self-reported history of motor, sensory or cognitive impairment. Prior to testing, participants were evenly divided into two groups [Group 1: continuous feedback (CF) and Group 2: terminal feedback (TF)]. All ethical standards and safety monitoring procedures were completed in accordance with the Health Science and Science Research Ethics Board at the University of Ottawa.
Experimental apparatus
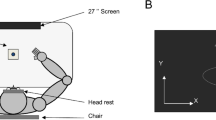
Testing took place in a secluded room with a two-joint robot manipulandum (KINARM End-Point Lab, BKIN technologies Ltd, Kingston, ON, Canada), adjacent to the experimenter’s computer workstation. The KINARM set-up consisted of a downward-facing computer monitor, a reflective surface placed 20.5 cm below the computer monitor, and a robot handle placed 20.5 cm below the reflective surface that participants grasped with their right hand (see Fig. 1a). The downward-facing computer monitor (EzSign model 47LD452B; refresh rate: 60 Hz (or every 17 ms); LG. Seoul, South Korea) projected visual information onto the reflective surface, which covered a workspace of 70 cm by 36 cm. Participants’ movements of the robot handle were represented in the form of a cursor (i.e., magenta circle 0.5 cm in diameter) on the reflective surface. Participants were unable to see their right limb due to the reflective surface that obstructed their view and a cloth that was placed parallel to the reflective surface around their neck and shoulders.

Experimental apparatus, dimensions and visuomotor training environment. a Side view of the experimental apparatus with a cloth that occluded vision of the limb. b The three target locations (black circles), each 15 cm away from the home position (white dotted circle); one directly above the home position (0°) and two at 45° left and right of straight ahead. Example of on-screen feedback in the novel reaching task when provided with c continuous feedback (CF) and d terminal feedback (TF) with the cursor rotated 45° CW relative to the trajectory of the hand
Calibration of the KINARM was carried out prior to testing each participant according to the manufacturer’s instructions. Participants were asked to sit on a standard height-adjustable office chair at a self-desired height and distance from the KINARM, such that they were able to see and reach all of the targets comfortably. Participants grasped the vertical cylindrical handle of the KINARM with their right hand, elbow flexed at approximately 90° and the forearm in a neutral position. The position of the hand was tracked at 1000 Hz, with a spatial accuracy of 0.1 mm.
In general, participants were required to rapidly reach with the robot handle to a target (yellow circle, 1 cm in diameter) presented 15 cm away from a central home position (white circle, 1 cm in diameter), located approximately 20 cm in front and aligned with each participant’s midline. Participants in the CF group saw a magenta cursor that was displayed from the start of their movement up until the end of the movement (Fig. 1c). Participants in the TF group were provided with final hand position at the end of a movement (Fig. 1d). The end of the movement was defined online as the time when movement velocity first fell below 0.01 m/s. All participants reached to three targets (see Fig. 1b) in both typical (aligned cursor) and novel (rotated cursor) visual training environments. Reaching targets were displayed at 1 of 3 possible locations, specifically, directly ahead of the home position (0°) and at 45° left or right of the straight ahead (Fig. 1b). The sequence of target locations was presented randomly.
Procedure
Participants were required to reach in two different visual training environments: (1) reaching with aligned visual feedback of their hand, such that the cursor on the screen accurately depicted where their hand was in space (i.e., aligned cursor), and (2) reaching with distorted visual feedback of their hand such that the cursor’s trajectory was rotated 45° clockwise (CW) relative to hand motion (i.e., rotated cursor). Reaching with the distortion presented participants with a novel reaching environment, which required them to adapt their reaching movements by aiming counterclockwise (i.e., left of the target) to counteract the rotation. All participants first reached with the aligned cursor (150 trials) followed by the rotated cursor (150 trials). A mandatory 5-min break separated testing times and total participation lasted approximately 1 h.
The experiment began once the participant was seated in a comfortable position and verbally indicated they were ready to start the experiment. Each trial began with a white circle (home position) presented for 1000 ms. Participants were instructed to keep the cursor representing the hand within the home position. In the case that the cursor was outside the home position, the robot passively moved the participant’s hand into the desired home position, ensuring that the hand always started at the same position on every trial.
Participants were instructed that once a target appeared they were to reach rapidly, but comfortably, to the target and be as accurate as possible. At the end of the reach, the hand was held at the movement end location for 500 ms. During this time the target was visible and individuals in the TF feedback group were provided with terminal visual feedback regarding their final hand position in the form of the cursor. The CF group did not receive visual feedback of their hand position at this time. Following 500 ms, the robot passively moved the participant’s hand to the location of where the hand should have reached in order for the cursor to have landed on the center of the target in the absence of visual feedback. The hand was held at this location for an additional 500 ms. Finally, the robot passively moved the participant’s hand back to the home position along a linear path in a movement time of 1000 ms. The home position then became visible. The hand was held at the home position for another 1000 ms before a target appeared, signaling the start of the next trial (see Fig. 2).

Visual events occurring within a single trial for each of the two visual feedback groups (i.e., CF and TF) and reach environments (i.e., typical and novel). a All reaching trials always started with a visible home position (white circle) and a visible cursor (white circle) held for 1000 ms at the home position until the target appeared (black circle), cueing participants to reach to the target. The CF group had continuous view of the cursor until the end of the movement. At movement end, the cursor was removed for the CF group. In contrast, the TF group only saw the cursor at the end of the movement. For both groups, the hand was held in the movement end position for 500 ms with view of the target. After which, the target and cursor were hidden and the unseen hand was passively moved to where the hand should have landed in order for the visual representation of the hand to be in the center of the target. The unseen hand was held at this position for 500 ms. The hand was then moved passively back to the home position in a movement time of 1000 ms. At this point, the home position and cursor were made visible once again and the hand was held for 1000 ms. b Timing of visual events of a single trial represented in a timeline
Data analyses and results
Data for each reaching trial were collected and analyzed using both within-trial and between-trial measures of movement control. Before analyses, the start and end of each movement was determined based on a velocity criterion (i.e., first increase in velocity greater than 0.01 m/s for 100 ms and the first decrease in velocity below 0.01 m/s, respectively). Endpoint position data were used to screen for outliers. In particular, if a participant’s endpoint position in the horizontal or vertical directions was greater than three standard deviations above their respective mean endpoint position in the same dimension, the trial was removed from further analyses. This screening resulted in the removal of 64 trials (1.33%).
Participants’ reaching data were grouped into seven bins consisting of 12 trials each: trials 1–12, 13–24, 25–36, 37–48, 70–82, 100–112 and 130–142. A greater number of bins were defined earlier in training compared to later in training, allowing us to examine early changes in reaches in detail, which were expected to happen within the first 20–30 trials (i.e., 2–3 bins; Huberdeau et al. 2015a, b). For the variables discussed below, data were collapsed across all targets for each participant and averaged over the 12 trials within each bin. All dependent variables were then statistically evaluated using a mixed analyses of variance (ANOVA) in SPSS (IBM, version 24). If the Mauchly’s test of sphericity was significant (p < 0.05) then the Greenhouse–Geisser correction factor was applied and the adjusted degrees of freedom are reported. Differences with a probability of 0.05 or less were considered significant. Following a significant interaction, a simple effect analysis was conducted using the Bonferroni correction. In the case of analyses yielding significant main effects and significant interactions, only the interactions are reported and interpreted below.
Assessment of adaptation
Initial analysis of the reaching trials was conducted to evaluate whether participants were able to adapt their reaches to meet the movement requirements when reaching in the novel visuomotor environment. This was done by tracking changes in angular errors (AE) at movement endpoint (EP) and movement time (MT) over trials. EP angular errors were defined as the angular difference between a movement vector (from the home position to movement EP) and a reference vector (from the home position to the target location). MT was defined as the time from movement initiation until movement end. For each variable, a 2 group (CF, TF) × 2 reaching environment (aligned, rotated) × 7 time (bins with trials: 1–12, 13–24, 25–36, 37–48, 70–82, 100–112 and 130–142) mixed analysis of variance (ANOVA) with repeated measures (RM) on the last two factors was used to determine if participants were able to adapt their movements in the novel environment.
As shown in Fig. 3a, b, all participants were relatively accurate when reaching with an aligned cursor over all bins of trials (mean EP angular error = 0.26° ± 0.30°). Participants then reached with greater errors, such that the cursor was right of the target, when the cursor rotation was first introduced. In accordance with these observations, an analysis of EP angular errors revealed a reaching environment × time interaction [F(1.407,19.704) = 4.689, p = 0.032, η2 = 0.251]. There was no main effect of group or interactions involving group (all p > 0.10). Post hoc analysis indicated that EP angular errors were significantly greater when reaching with a rotated cursor compared to when reaching with an aligned cursor early in training across all participants. In general, participants were able to reduce their angular error over time, such that following bin 4 (48 trials with a rotated cursor), EP angular errors did not differ significantly between reaching environments.

Mean and variability of cursor endpoint angular errors (EP AE) measured in degrees for the continuous (CF) and terminal (TF) feedback groups over 7 bins consisting of 12 trials each. a, b Mean EP AE over trials in the CF and TF groups, respectively. Dotted light grey line represents target location. Values above the zero axis (i.e., dotted light grey line) represent reaches where the cursor ended up to the right of the target and values below, represent reaches where the cursor ended up to the left of the target. c, d Mean variability of EP AE over trials in the CF and TF groups, respectively. In a–d black lines represent reaches completed in a novel environment (i.e., rotated cursor) and grey lines represent reaches completed in a typical environment (i.e., aligned cursor). Error bars represent standard error of the mean. Asterisks (*) represent significant differences between reaching with an aligned versus a rotated cursor (p < 0.05)
As seen in Fig. 3c, d, participants in the CF group (M = 3.29° ± 0.32°) were more consistent in their EP angular errors than participants in the TF group (M = 6.42° ± 0.32°); group [F(1,14) = 47.429, p < 0.001, η2 = 0.772]. ANOVA also revealed a significant reaching environment × time interaction [F(2.940,41.158) = 12.266, p < 0.001, η2 = 0.467], indicating that variability in EP angular error decreased over time in both reaching environments (i.e., aligned and rotated cursor). Post hoc analysis indicated that while variability in EP angular error changed over time, it was always higher when reaching with a rotated cursor compared to reaching with an aligned cursor for both groups of participants. Overall reaching with an aligned cursor did not significantly change (i.e., mean and variability) across trials for participants reaching with continuous or terminal visual feedback.
Analysis of mean MT revealed no main effects or interactions related to reaching environment (p > 0.073), but revealed an interaction between group × time [F(3.092,43.293) = 2.777, p = 0.016, η2 = 0.166]. However, post hoc analysis did not establish any group differences between groups or across time (all p > 0.106; see Table S3 in the Supplementary File, Section C). Analysis of MT variability resulted in a three-way interaction [group × reaching environment × time: F(6,84) = 2.875, p = 0.013, η2 = 0.170], with post hoc analysis indicating that reaching with an aligned cursor generally resulted in less variable MTs compared to reaching with a rotated cursor, across reaching trials, regardless of Group. That said, participants in the CF group only demonstrated increased variability in MT when reaching with a rotated cursor compared to with an aligned cursor early in training (i.e., bins 1 and 2, both p < 0.003). Additional performance measures of adaptation [angular errors at peak velocity (PV), resultant EP error, and distance in the anterior-posterior (AP) direction] can be found in the Supplementary File, Section A. Together, these variables demonstrate participants’ ability to adapt to the visuomotor rotation and refine their movements with continued practice. In spite of this learning, variability was typically greater when reaching with a rotated cursor, indicating that movements were not as consistent across trials compared to when reaching with an aligned cursor, even at the end of reach training.
Assessment of online versus offline control
Movement preparation: offline control
After establishing that participants performed at similar levels of accuracy with respect to EP angular errors and with similar MT (and also PV angular errors; see Supplementary File, Section A), in both reaching environments, we then sought to compare movement characteristics of reaches in the two reaching environments. We used variables that have previously been used to establish online versus offline control processes in well-learned reaching environments. We first looked for evidence of offline control by examining changes in reaction time (RT), time to peak velocity (TTPV) and proportional TTPV (pTTPV). RT was defined as the time required to initiate a response from target presentation until the start of the movement and TTPV was defined as the time PV was achieved within the movement. Similarly, pTTPV was expressed as a percentage of overall MT (the time from movement initiation until movement end). Previous research has suggested that RT and TTPV provide insight into the degree of planning involved in a movement, with longer RTs and longer TTPVs indicating a greater contribution of planning processes (i.e., offline control; Burkitt et al. 2013; Hansen et al. 2006; Khan et al. 2003; Elliott et al. 2001; Heath et al. 1998; Mendoza et al. 2006). A mixed 2 group × 2 reaching environment × 7 time ANOVA with RM on the last two factors, was used to determine if any of these within-trial measures differed across reaching environments over trials.
In Fig. 4, mean and variability of RT are presented. Main effects of Reaching Environment were observed for both mean [F(1,14) = 26.288, p < 0.001, η2 = 0.722] and RT variability [F(1,14) = 21.669, p < 0.001, η2 = 0.608]. RTs were shorter (see Fig. 4a, b) when reaching with an aligned cursor (M = 363.3 ms ± 30.6 ms) compared to reaching with a rotated cursor (M = 523.8 ms ± 40.0 ms). This pattern was seen for both the CF and TF groups, as analysis revealed no main effect of Group or interactions with Group (all p > 0.956). Similarly, RT variability (see Fig. 4c, d) was lower when reaching with an aligned cursor (M = 83.9 ms ± 13.0 ms) compared to reaching with a rotated cursor (M = 148.7 ms ± 14.3 ms). These differences in Reaching Environment continued across all trials.

Mean RT and mean variability of reaction time (RT) measured in milliseconds for the continuous (CF) and terminal (TF) feedback groups over 7 bins consisting of 12 trials each. a, b Mean RT over trials in the CF and TF groups, respectively. c, d Mean variability of RT over trials in the CF and TF groups, respectively. In a–d Grey lines represent reaches completed in a typical environment (i.e., aligned cursor) and black lines represent reaches completed in a novel environment (i.e., rotated cursor). Error bars represent standard error of the mean. Asterisks (*) represent significant differences between reaching with an aligned versus a rotated cursor (p < 0.05)
Analysis of mean TTPV resulted in no significant main effects or interactions (p > 0.168; mean values can be found in Table S3 of the Supplementary File, Section C). Figure 5a displays variability in TTPV. Similar to mean TTPV, analysis of variability of TTPV revealed no significant main effects or interaction (p > 0.082). However, there was a trend in which reaching with a rotated cursor (M = 119.4 ms ± 15.2 ms) appeared to be more variable compared to an aligned cursor [M = 90.1 ms ± 17.8 ms; F(1,14) = 3.511, p = 0.082, η2 = 0.200]. Analyses of pTTPV revealed no main effect of reaching environment or interactions involving the factor of reaching environment; the results for pTTPV are reported in the Supplementary File, Section C.

Mean variability of a time to peak velocity (TTPV), b time after peak velocity (TAPV) and c jerk score (JScore). Dotted lines represent reaching in a typical environment (i.e., aligned cursor) and solid lines represent reaching in a novel environment (i.e., rotated cursor). Blue lines represent reaches by the continuous feedback (CF) group and orange lines represent reaches by the terminal feedback (TF) group. Error bars represent standard error of the mean. Asterisks (*) represent significant differences between reaching with an aligned versus a rotated cursor (p < 0.05)
Movement execution: online control
To establish contributions of online control, we examined the following within-trial measures: time after peak velocity (TAPV), proportional TAPV (pTAPV), and Jerk Score (JScore). TAPV was defined as the remaining time after PV until movement end and pTAPV was a proportional time, expressed as a percentage of overall MT. TAPV can be used as a preliminary indication of whether participants use visual feedback to make corrections online to reach the target (for reviews, see Elliott et al. 2010, 2017). A modified version of the Teulings et al. (1997) equation was used to calculate jerk (JScore; de Grosbois and Tremblay 2016):
where ssJerk represents the sum of the squared jerk across the trajectory, MT represents movement time in seconds, and JerkVoltsRange represents the difference between the maximum and minimum jerks recorded from the acceleration profile across a trajectory. The final normalized JScore is a dimensionless number (Aboelnasr et al. 2017; Alberts et al. 2000), which indicates the rate of change of acceleration per time across a movement. Greater JScores are reflective of many zero-line crossings in movement acceleration profiles, which is indicative of multiple online corrections (de Grosbois and Tremblay 2016). For all within-trial measures, a mixed 2 group × 2 reaching environment × 7 time ANOVA with RM on the last two factors, was used to determine if any of these within-trial measures differed across reaching environments over trials. Finally, to gain insight into how reaching trajectories unfolded over the course of a movement, variability of angular errors was assessed at selected proportions of MT using a 2 group × 2 reaching environment × 7 time x 4 proportion (25%, 50%, 75% and 100%) mixed ANOVA with RM on the last three factors. This between-trial analysis allowed us to establish early versus late modifications in trajectory and determine whether they differed depending on visual feedback and reaching environment.
As shown in Table S3 of the Supplementary File (Section C), analysis of mean TAPV revealed no main effects or interactions related to Reaching Environment (p > 0.183). Analysis revealed an interaction between group × time [F(6,84) = 2.827, p = 0.015, η2 = 0.168]. Participants in the CF group spent more after having achieved PV early in training (i.e., bin 1) compared to participants in the TF group (p = 0.027). Further discussion of the means of several other within-trial measures (i.e., TTPV, pTTPV, pTAPV, JScore, EP error and path length), separated by visual feedback, can be found in Table S3 of the Supplementary File (Section C).
Figure 5 displays variability in TTPV, TAPV, and JScore. TAPV was more variable in the CF group (M = 161.7 ms ± 14.1 ms) compared to the TF group (M = 136.3 ms ± 14.1 ms). This increased variability was only seen early on in training [i.e., bins 1 and 2; group × reaching environment × time: F(6,84) = 4.429, p = 0.001, η2 = 0.240]. Analysis of JScore variability resulted in a significant group × reaching environment × time interaction [F(6,84) = 4.063, p = 0.001, η2 = 0.225]. Post hoc analysis revealed that JScore was more variable in the CF group, when reaching with a rotated cursor. It is important to note the three-way interactions of group × reaching environment × time seen in several of the analyses of variability outlined above, only reveal a change when reaching with a rotated cursor in the CF group. When reaching with an aligned cursor, regardless of visual feedback, variability did not change across reach training trials (p > 0.159).
Analysis of angular error (AE) across movement proportions (i.e., 25%, 50%, 75% and 100% of the movement) resulted in a main effect of Group [F(1,14) = 2.205, p = 0.160, η2 = 0.136], as well as a three-way interaction between reaching environment × proportion × time [F(3.008,42.111) = 4.693, p = 0.006, η2 = 0.251]. In general, variability of AE across movement proportions was greater in the TF group (M = 14.35° ± 0.79°) compared to the CF group (M = 10.77° ± 0.79°) and when reaching with a rotated cursor versus an aligned cursor. As seen in Fig. 6, variability decreased across movement proportion when reaching with an aligned and rotated cursor [i.e., AE variability at 25% of the movement was greater than at the end of the movement (100% of the movement)] across all trials (p < 0.001). This same pattern was seen early in training (bin 1; Fig. 6a, b) and late in training (bin 7; Fig. 6c, d).

Mean variability of cursor angular error at different proportions of the movement trajectory (i.e., 25%, 50%, 75% and 100%). a, b Mean variability of angular error at different proportions during trials 1–12 (bin 1) in the CF and TF groups, respectively. c, d Mean variability of angular error at different proportion during trials 130–142 (bin 7) in the CF and TF groups, respectively. In a–d grey lines represent reaches completed in a typical environment (i.e., aligned cursor) and black lines represent reaches completed in a novel environment (i.e., rotated cursor). Black dots (•) above movement proportions represent significant differences between that corresponding movement proportion compared to the end (i.e., 100% movement proportion) of the movement trajectory (p < 0.05). Error bars represent standard error of the mean. Asterisks represent differences between reaching with an aligned versus a rotated cursor (p < 0.05)
Discussion
In this study, we examined differences in movement control processes underlying reaches performed in a novel visuomotor environment compared to a typical environment. Participants reached to three targets with a cursor that was either aligned with their hand motion or was distorted 45° clockwise with respect to movement of their hand for a total of 300 trials (i.e., 150 trials in each reaching environment). Visual feedback was provided continuously until the end of the movement (i.e., continuous feedback group) or was only provided at the end of the movement (i.e., terminal feedback group) to investigate the internal control processes known to influence movement planning and execution (Abahnini et al. 1997; Elliott et al. 2001, 2010; Hansen et al. 2006; Khan et al. 2003; Posner et al. 1976; Sarlegna and Sainburg 2009; Tremblay et al. 2013). The objective was to compare traditional measures associated with online versus offline control across reaching environments to establish whether adapted movements (i.e., reaching in a novel environment) are carried out in a similar manner as well-learned movements (i.e., reaching in a typical environment).
Kinematics underlying visuomotor adaptation
Traditionally, the assessment of performance measures in visuomotor adaptation paradigms have been limited to angular errors at peak velocity or movement endpoint (Krakauer et al. 2000; Sainburg and Wang 2002; Yamamoto et al. 2006; Zbib et al. 2016). As we showed here, angular errors were reduced with reach training trials to approximately baseline levels of performance (Fig. 3). Moreover, this occurred rather quickly (e.g., following 48 trials). Recently, more attention has been given to additional kinematic variables underlying movements performed in a novel environment. For example, Simon and Bock (2016) looked to establish if how a movement was carried out (e.g., with respect to PV, MT, and path length) influenced the extent of visuomotor adaptation achieved. For each variable related to movement execution, participants were divided into two groups, such that one group consisted of participants who scored high on a particular variable and the other group consisted of participants who scored low on a particular variable (i.e., participants with fast PV versus participants with slow PV, long MT versus short MT and long path lengths versus short path lengths). Peak velocity angular errors (PV AE) across baseline, training and deadaptation phases of testing were then compared between the two groups of participants for each variable. Results indicated that PV AE decreased over training in a similar manner across all participants, independent of high or low values of PV, path length or MT. Based on these results, Simon and Bock concluded that how reaches are completed during adaptation has little influence on the extent of visuomotor adaptation achieved. While their results suggest that adaptive success is independent of individual differences in how movements are performed, they do not provide insight into the control processes underlying movements performed in a novel environment.
In the current study we tracked kinematic variables (including those used by Simon and Bock 2016) over time to establish the control processes of movements performed in a novel environment. We directly compared kinematic measures underlying movements made in a novel environment to those in a typical environment. We found differences in how movements were controlled between reaching environments across all training trials (i.e., when participants were first adapting to the visuomotor distortion and even at the end of training, when participants had adapted to the visuomotor distortion). Specifically, reaches in a novel environment changed over time, as shown by decreases in AE (see Fig. 3) as training progressed. Decreases in the magnitude of AE were indicative of participants having adapted to the visuomotor rotation, as participants were able to decrease their errors. These results add support to the utilization of AE to assess adaptation.
While AE at EP (and PV) when reaching in a novel environment were reduced to similar levels as in a typical environment at the end of training, other performance variables continued to differ across the reaching environments. For instance, RT and RT variability were greater in the novel environment compared to the typical environment, regardless of visual feedback even at the end of training (see Fig. 4). Furthermore, our analysis of variability (i.e., RT variability, see Fig. 4c, d; TTPV variability see Fig. 5a; AE variability across a trajectory, see Fig. 6), clearly showed that variability remained higher when reaching with a rotated cursor compared to when reaching with an aligned cursor, even at the end of reach training. These persistent differences in reaches between reaching environments suggests that movements across the two reaching environments were not performed the same way.
Movement planning
Fernandez-Ruiz et al. (2011) have shown that reaching performance in a novel visuomotor environment differed depending on RT. In their study, they explored the relationship between RT and changes in reach errors when reaching with a cursor rotated 60° CCW relative to hand motion. Participants were asked to make continuous out and back movements, with full vision of a cursor, under constrained (RT < 350 ms) or unconstrained RT conditions. They found that RT early in learning was positively correlated with visuomotor adaptation, as assessed by both the rate and extent of decrease in reach direction errors. In other words, longer RTs (i.e., unconstrained RT) were associated with a faster rate of visuomotor adaptation as shown by a greater decrease in reach errors. They purported that participants in the unconstrained RT condition, who exhibited prolonged RTs, may have processed errors from the previous movements more thoroughly, prior to initiating the subsequent movement, and therefore reduced direction errors more quickly. In line with their hypothesis, the constrained RT group showed a slow error reduction rate, but was less variable in direction errors compared to the unconstrained RT group. More relevant to the current study, they also found that, if provided the opportunity, average RT remained elevated even at the end of the adaptation phase (i.e., end of training in a novel environment). The authors suggested that the elevated RT that persisted until the end of training could be due to participants using a mental rotation strategy to counteract the cursor rotation.
In contrast to Fernandez-Ruiz et al. (2011), we did not impose RT constraints in the current study. However, we did see a rapid reduction in EP AE early in learning when RT was unconstrained, as well as RTs that remained elevated at the end of training in a novel environment compared to a typical environment (see Fig. 4). As suggested by Fernandez-Ruiz et al., this increased RT may be due to participants processing errors from previous trials and coming up with a strategy to ensure success on the current trial. It is important to note that within the current experimental design, participants could have engaged in strategic processes both prior to and during the RT interval. On all trials, participants were at the home position for 1000 ms (i.e., fixed foreperiod) before the target go-signal appeared. As a result, it is possible that participants could have used this time to process errors from previous trials and come up with a general aiming strategy for the next trial. Strategies for a specific target would be limited, as participants were not cued on which of the three targets would appear on any trial. In accordance with the suggestion that errors from previous trials were processed prior to the RT interval, we found that while RT on a given trial was significantly correlated with the magnitude of the EP AE experienced on the preceding trial (p < 0.001; i.e., following a trial with a greater EP AE, RT tended to be greater), RT was also positively correlated with EP AE on the same trial (p < 0.001). Given the significant correlations observed across consecutive trials, this implies that changes in RT between trials were not necessarily due to the error experienced on the previous trial.
Recently, Leow et al. (2017) have suggested that increased preparation times (i.e., RT) in a novel environment are an indicator of some underlying strategic process being employed (i.e., explicit process; for a definition of explicit processes see Huberdeau et al. 2015a, b). Regardless of the strategy being employed [i.e., mental rotation as suggested by Fernandez-Ruiz et al. (2011), or explicit process], these findings of consistently longer RTs when reaching with a rotated cursor compared to an aligned cursor support a greater involvement of planning processes when reaching in a novel visuomotor environment compared to a typical visuomotor environment. Interestingly, we found that these elevated RTs at the end of training in a novel environment were present regardless of the type of visual feedback available (i.e., CF and TF). Additional analyses also revealed a significant correlation between variability in EP AE and RT for participants in the CF and TF groups (p = 0.006 for both groups), such that participants who were more variable with respect to EP AE, also had more variable RTs. As outlined in the previous paragraph, we are hesitant to conclude that EP errors achieved and the potential processing of these errors during the RT interval were responsible for the increased RT observed and associated increased variability. Instead, our results showing elevated RT and RT variability emphasize the greater use of planning processes underlying these adapted movements compared to well-learned movements.
Models of limb control
The recently forwarded multiple process model of limb control explores the interplay between accuracy, training, speed, energy and strategic behavior of movements performed in a typical environment (Elliott et al. 2017). Our current understanding of limb control includes the ability to make real-time corrections, early (i.e., impulse control) and late (i.e., limb–target control) in a trajectory, while movements are being executed (commonly referred to as online control). Alternatively, movement corrections can also be controlled through updating a movement plan, usually seen through changes in how subsequent movements are initiated (commonly referred to as offline control). In both online and offline control, the availability of sensory feedback, primarily vision, plays an important role in how the planning and execution of goal-directed movements unfold.
Overall, our findings follow the empirical evidence supporting the multiple process model. Of note, accuracy, training and strategic behavior are the main aspects of the model that are important to the current study. Our results show that when reaching in a typical environment (i.e., aligned cursor) individuals in the CF group were more accurate overall (in terms of endpoint distance from target) compared to the TF group (see Table S1 of the Supplementary File, Section A). This finding is expected considering individuals in the CF group can readily utilize visual information to correct an ongoing movement. Similarly, TAPV and JScores were larger in the CF versus TF group, reflecting online corrective processes being adopted early in training (i.e., within bins 1–3). Differences between groups with respect to mean performance variables and variability were reduced over reach training trials as movements were refined by updating an internal representation of the movement with repeated training (Burkitt et al. 2013; Elliott and Lee 1995).
When reaching in a novel environment, several movement outcomes were consistent with the expected behavior linked to the availability of visual feedback. For example, we found that the CF group had less variable EP AEs compared to the TF group (see Fig. 3). Likewise, analysis of variability in other kinematic measures (i.e., TTPV, TAPV, and AE across movement proportion) indicated findings in the expected direction, such that measures were more variable in the TF group compared to the CF group, except in TAPV, where the CF group was more variable [see Table S3 of the Supplementary File (Section C), Figs. 5 and 6]. However, when we re-examine these variables, we see persistent differences across reaching environments with respect to performance variability (i.e., EP AE, RT, TAPV and AE across movement proportion), regardless of visual feedback availability. This suggests that the CF group also engages in more than just online error corrective processes. Specifically, the mechanisms underlying these adapted movements rely on more offline control processes (i.e., planning), even when visual feedback is available.
Measures associated with movement planning indicated distinct differences between reaching environments. In Fig. 4, we see overall greater mean RT and associated variability when reaching with a rotated cursor compared to aligned cursor for both the CF and TF groups. Furthermore, higher AE variability were seen at various stages of movement (i.e., 25%, 50%, 75%), continuing until the end of training in both CF and TF groups (see Fig. 6). Given these consistent differences seen between reaching environments across visual feedback groups, we suggest that when reaching in a novel environment, participants are refining their movement through offline mechanisms (i.e., planning) and may not be effective in their ability to use visual feedback even when it is continuously available. Furthermore, participants may be adopting a “play-it-safe” approach as suggested by Elliott et al. (2004, 2014), in that they plan their movements so that they fall short of the target (i.e., undershoot). Elliott et al. (2004) observed this behavior when participants did not have visual feedback available during and upon completion of the movement. The fact that we see this type of behavior when reaching in a novel environment supports the notion of ineffective use of visual information online, as well as a greater contribution of offline planning processes compared to reaching in a typical environment.
Mechanisms of adaptation
While the primary focus of the current research was to determine the contributions of movement control processes underlying reaches in a novel environment, our results also speak to current models of visuomotor adaptation. In general, visuomotor adaptation has been suggested to arise due to two processes; (1) a fast process (i.e., strategic control; explicit process) involved in the rapid reduction of movement errors and (2) a slow process (i.e., spatial realignment; implicit process) involved in slower adjustments made as a result of incongruent sensory information between expected and actual limb positions (McDougle et al. 2016; Redding et al. 2005; Redding and Wallace 1996, 2002; Smith et al. 2006; Taylor and Ivry 2011; Taylor et al. 2014). These processes have been studied by observing changes in angular errors at movement EP or PV in reaching trials with and without visual feedback (i.e., aftereffect trials). The results of the current study speak to an additional method to assess processes underlying visuomotor adaptation [also see Supplementary File (Section B)]. Analyses of variability of several kinematic measures resulted in three-way interactions of group × reaching environment × time that follow the suggested trend of an initial period of fast error reduction (i.e., explicit) and then a period of slow adjustment (i.e., implicit). Our assessment of kinematic variables does not directly distinguish between the contributions of explicit processes from implicit processes. Instead, we provide evidence that preparation time may be linked to the contribution of explicit processes when reaching in a novel environment, as suggested by Leow et al. (2017). Our understanding of the interaction between these implicit and explicit processes remains incomplete. Our participants reduced their errors and variability with training (i.e., implicit visuomotor adaptation); however, we continued to see participants use a strategy (i.e., engage potentially explicit visuomotor adaptation processes) throughout training.
Newly acquired adapted movements
We found a decrease in mean angular errors at movement EP and PV, so that reaching errors eventually became similar in magnitude to when reaches were completed in a typical reaching environment. This finding demonstrates participants’ ability to learn in a novel environment, so that a new pattern of movement is acquired to achieve a movement outcome similar to what was seen during baseline reach training (Batcho et al. 2016; Ghilardi et al. 1995; Kantak and Winstein 2012; Schmidt et al. 1979). Similar outcomes in both a typical and novel environment would suggest that visuomotor adaptation in a novel environment was “complete” (van der Kooij et al. 2015; Wang and Lei 2015). While individuals achieved similar movement outcomes in our study (i.e., PV AE and EP AE), we found that performance (i.e., movement control), even at the end of training, differed with respect to several kinematic measures between reaching environments. These results indicate that visuomotor adaptation does not necessarily result in similar control mechanisms, and the discussion of visuomotor adaptation should make clear if it is with respect to adaptation of movement outcomes versus control. With respect to control, our results suggest offline control mechanisms, reflecting the engagement of an explicit strategy, had a larger contribution when reaching in a novel compared to typical environment. Our results would further suggest that this strategy continues to be engaged throughout training.
References
Abahnini K, Proteau L, Temprado JJ (1997) Evidence supporting the importance of peripheral visual information for the directional control of aiming movements. J Mot Behav 29(3):230–242
Aboelnasr EA, Hegazy FA, Altalway HA (2017) Kinematic characteristics of reaching in children with hemiplegic cerebral palsy: a comparative study. Brain Inj 31(1):83–89
Alberts JL, Saling M, Adler CH, Stelmach GE (2000) Disruptions in the reach-to-grasp actions of Parkinson’s patients. Exp Brain Res 134(3):353–362
Batcho CS, Gagné M, Bouyer LJ, Roy JS, Mercier C (2016) Impact of online visual feedback on motor acquisition and retention when learning to reach in a force field. Neuroscience 337:267–275
Bernier P-M, Chua R, Franks IM, Khan MA (2006) Determinants of offline processing of visual information for the control of reaching movements. J Mot Behav 38(5):331–338
Burkitt JJ, Grierson LEM, Straite V, Elliott D, Lyons J (2013) The impact of prior knowledge about visual feedback on motor performance and learning. Adv Phys Educ 3(1):1–9
Cheng DT, Luis M, Tremblay L (2008) Randomizing visual feedback in manual aiming: reminiscence of the previous trial condition and prior knowledge of feedback availability. Exp Brain Res 189(4):403–410
Clower DM, Boussaoud D (2000) Selective use of perceptual recalibration versus visuomotor skill acquisition. J Neurophysiol 84(5):2703–2708
de Grosbois J, Tremblay L (2016) Quantifying online visuomotor feedback utilization in the frequency domain. Behav Res Methods 48(4):1653–1666
de Grosbois J, Tremblay L (2018) Distinct and flexible rates of online control. Psychol Res 82(6):1054–1072
Desmurget M, Grafton S (2000) Forward modeling allows feedback control for fast reaching movements. Trends Cogn Sci 4(11):423–431
Elliott D, Allard F (1985) The utilization of visual feedback information during rapid pointing movements. Q J Exp Psychol Sect A 37(3):407–425
Elliott D, Lee TD (1995) The role of target information on manual-aiming bias. Psychol Res 58(1):2–9
Elliott D, Carson R, Goodman D, Chua R (1991) Discrete vs. continuous visual control of manual aiming. Hum Mov Sci 10:393–418
Elliott D, Binsted G, Heath M (1999) The control of goal-directed limb movements: correcting errors in the trajectory. Hum Mov Sci 18:121–136
Elliott D, Helsen WF, Chua R (2001) A century later: Woodworth’s (1899) two-component model of goal-directed aiming. Psychol Bull 127(3):342–357
Elliott D, Hansen S, Mendoza J, Tremblay L (2004) Learning to optimize speed, accuracy, and energy expenditure: a framework for understanding speed-accuracy relations in goal-directed aiming. J Mot Behav 36(3):339–351
Elliott D, Hansen S, Grierson LEM, Lyons J, Bennett SJ, Hayes SJ (2010) Goal-directed aiming: two components but multiple processes. Psychol Bull 136(6):1023–1044
Elliott D, Dutoy C, Andrew M, Burkitt JJ, Grierson LEM, Lyons JL, … Bennett SJ (2014) The influence of visual feedback and prior knowledge about feedback on vertical aiming strategies. J Mot Behav 46(6):433–443
Elliott D, Lyons J, Hayes SJ, Burkitt JJ, Roberts JW, Grierson LEM, … Bennett SJ (2017) The multiple process model of goal-directed reaching revisited. Neurosci Biobehav Rev 72:95–110
Fernandez-Ruiz J, Wong W, Armstrong IT, Flanagan JR (2011) Relation between reaction time and reach errors during visuomotor adaptation. Behav Brain Res 219:8–14
Gaveau V, Prablanc C, Laurent D, Rossetti Y, Priot A-E (2014) Visuomotor adaptation needs a validation of prediction error by feedback error. Front Human Neurosci 8:880
Ghilardi MF, Gordon J, Ghez C (1995) Learning a visuomotor transformation in a local area of work space produces directional biases in other areas. J Neurophysiol 73(6):2535–2539
Grierson LEM, Elliott D (2008) Kinematic analysis of goal-directed aims made against early and late perturbations: an investigation of the relative influence of two online control processes. Hum Mov Sci 27:839–856
Grierson LEM, Elliott D (2009) Goal-directed aiming and the relative contribution of two online control processes. Am J Psychol 122(3):309–324
Hansen S, Glazebrook CM, Anson JG, Weeks DJ, Elliott D (2006) The influence of advance information about target location and visual feedback on movement planning and execution. Can J Exp Psychol 60(3):200–208
Hay JC, Pick HL (1966) Gaze-contingent prism adaptation: optical and motor factors. J Exp Psychol 72(5):640–648
Heath M (2005) Role of limb and target vision in the online control of memory-guided reaches. Mot Control 9:281–311
Heath M, Hodges NJ, Chua R, Elliott D (1998) On-line control of rapid aiming movements: Unexpected target perturbations and movement kinematics. Can J Exp Psychol 52(4):163–173
Hinder MR, Riek S, Tresilian JR, de Rugy A, Carson RG (2010) Real-time error detection but not error correction drives automatic visuomotor adaptation. Exp Brain Res 201:191–207
Huberdeau DM, Haith AM, Krakauer JW (2015a) Formation of a long-term memory for visuomotor adaptation following only a few trials of practice. J Neurophysiol 114(2):969–977
Huberdeau DM, Krakauer JW, Haith AM (2015b) Dual-process decomposition in human sensorimotor adaptation. Curr Opin Neurobiol 33:71–77
Jeannerod M (1986) Are corrections in accurate arm movements corrective? Prog Brain Res 64(C):353–360
Kantak SS, Winstein CJ (2012) Learning-performance distinction and memory processes for motor skills: a focused review and perspective. Behav Brain Res 228(1):219–231
Khan MA, Elliott D, Coull J, Chua R, Lyons J (2002) Optimal control strategies under different feedback schedules: kinematic evidence. J Mot Behav 34(1):45–57
Khan MA, Lawrence G, Fourkas A, Franks IM, Elliott D, Pembroke S (2003) Online versus offline processing of visual feedback in the control of movement amplitude. Acta Physiol (Oxf) 113:83–97
Khan MA, Franks IM, Elliott D, Lawrence GP, Chua R, Bernier PM et al (2006) Inferring online and offline processing of visual feedback in target-directed movements from kinematic data. Neurosci Biobehav Rev 30:1106–1121
Krakauer JW, Ghilardi M-F, Ghez C (1999) Independent learning of internal models for kinematic and dynamic control of reaching. Nat Neurosci 2(11):1026–1031
Krakauer JW, Pine ZM, Ghilardi M-F, Ghez C (2000) Learning of visuomotor transformations for vectorial planning of reaching trajectories. J Neurosci 20(23):8916–8924
Leow L-A, Gunn R, Marinovic W, Carroll TJ (2017) Estimating the implicit component of visuomotor rotation learning by constraining movement preparation time. J Neurophysiol 118(2):666–676
Maksimovic S, Cressman EK (2018) Long-term retention of proprioceptive recalibration. Neuropsychologia 114(March):65–76
Mendoza JE, Elliott D, Meegan DV, Lyons JL, Welsh TN (2006) The effect of the Müller-Lyer illusion on the planning and control of manual aiming movements. J Exp Psychol Hum Percept Perform 32(2):413–422
McDougle SD, Ivry RB, Taylor JA (2016) Taking aim at the cognitive side of learning in sensorimotor adaptation tasks. Trends Cogn Sci 20(7):535–544
Meyer DE, Abrams RA, Kornblum S, Wright CE, Smith JEK (1988) Optimality in human motor performance: Ideal control of rapid aimed movements. Psychol Rev 95(3):340–370
Oldfield RC (1971) The assessment and analysis of handedness: the Edinburgh inventory. Neuropsychologia 9:97–113
Posner MI, Nissen MJ, Klein RM (1976) Visual dominance: an information-processing account of its origins and significance. Psychol Rev 83(2):157–171
Redding GM, Wallace B (1996) Adaptive spatial alignment and strategic motor control. J Exp Biol Human Percept Perform 22(2):379–394
Redding GM, Wallace B (2002) Strategic calibration and spatial alignment. J Mot Behav 34(2):126–138
Redding GM, Wallace B (2006) Generalization of prism adaptation. J Exp Psychol Hum Percept Perform 32(4):1006–1022
Redding GM, Rossetti Y, Wallace B (2005) Applications of prism adaptation: A tutorial in theory and method. Neurosci Biobehav Rev 29(3):431–444
Sainburg RL, Wang J (2002) Interlimb transfer of visuomotor rotations: Independence of direction and final position information. Exp Brain Res 145:437–447
Sarlegna FR, Sainburg RL (2009) The roles of vision and proprioception in the planning of reaching movements. Adv Exp Med Biol 629:317–335
Schmidt RA, Zelaznik HN, Hawkins B, Frank JS, Quinn JT Jr (1979) Motor-output variability: a theory for the accuracy of rapid motor acts. Psychol Rev 86(5):415–451
Scott SH (2016) A functional taxonomy of bottom-up sensory feedback processing for motor actions. Trends Neurosci 39(8):512–526
Shabbott BA, Sainburg RL (2010) Learning a visuomotor rotation: Simultaneous visual and proprioceptive information is crucial for visuomotor remapping. Exp Brain Res 203(1):75–87
Simon A, Bock O (2016) Influence of movement kinematics on visuomotor adaptation. Exp Brain Res 234:3083–3090
Smeets JBJ, van den Dobbelsteen JJ, de Grave DDJ, van Beers RJ, Brenner E (2006) Sensory integration does not lead to sensory calibration. Proc Natl Acad Sci 103(49):18781–18786
Smith MA, Ghazizadeh A, Shadmehr R (2006) Interacting adaptive processes with different timescales underlie short-term motor learning. PLoS Biol 4(6):1035–1043
Taylor JA, Ivry RB (2011) Flexible cognitive strategies during motor learning. PLoS Comput Biol 7(3):e1001096
Taylor JA, Krakauer JW, Ivry RB (2014) Explicit and implicit contributions to learning in a sensorimotor adaptation task. J Neurosci 34(8):3023–3032
Teulings H-L, Contreras-Vidal JL, Stelmach GE, Adler CH (1997) Parkinsonism reduces coordination of fingers, wrist, and arm in fine motor control. Exp Neurol 146(1):159–170
Tremblay L, Hansen S, Kennedy A, Cheng DT (2013) The utility of vision during action: multiple visuomotor processes? J Mot Behav 45(2):91–99
Tseng Y-W, Diedrichsen J, Krakauer JW, Shadmehr R, Bastian AJ (2007) Sensory prediction errors drive cerebellum-dependent adaptation of reaching. J Neurophysiol 98(1):54–62
van der Kooij K, Brenner E, Van Beers RJ, Smeets JBJ (2015) Visuomotor adaptation: how forgetting keeps us conservative. PLoS One 10(2):1–13
Walsh CM, Ling SC, Wang CS, Carnahan H (2009) Concurrent versus terminal feedback: it may be better to wait. Acad Med 84(10):S54–S57
Wang J, Lei Y (2015) Direct-effects and after-effects of visuomotor adaptation with one arm on subsequent performance with the other arm. J Neurophysiol 114(1):468–473
Wolpert DM, Kawato M (1998) Multiple paired forward and inverse models for motor control. Neural Netw 11:1317–1329
Woodworth RS (1899) The best movement for handwriting author(s. Sci New Ser 10(254):679–681
Yamamoto K, Hoffman DS, Strick PL (2006) Rapid and long-lasting plasticity of input-output mapping. J Neurophysiol 96:2797–2801
Zbib B, Henriques DYP, Cressman EK (2016) Proprioceptive recalibration arises slowly compared to reach adaptation. Exp Brain Res 234:2201–2213
Zelaznik HN, Hawkins B, Kisselburgh L (1983) Rapid visual feedback processing in single-aiming movements. J Mot Behav 15(3):217–236
Funding
This research was supported by the Natural Sciences and Engineering Research Council of Canada awarded to Erin K. Cressman.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
All authors declare that they have no conflict of interest.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
About this article

Cite this article
Wijeyaratnam, D.O., Chua, R. & Cressman, E.K. Going offline: differences in the contributions of movement control processes when reaching in a typical versus novel environment. Exp Brain Res 237, 1431–1444 (2019). https://doi.org/10.1007/s00221-019-05515-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-019-05515-0