
Abstract
The motor system shows a remarkable capacity to generalize learned behavior to new contexts while simultaneously permitting learning of multiple and sometimes conflicting skills. To examine the influence of proprioceptive state on this capacity, we compared the effectiveness of changes in workspace location and limb orientation (horizontal vs. parasagittal plane posture) in facilitating learning of opposing dynamic force-field perturbations. When opposing fields were encountered in similar workspace positions and limb orientations, subjects failed to learn the two tasks. In contrast, differences in initial limb proprioceptive state were sufficient for significant learning to take place. The extent of learning was similar when the two fields were encountered in different arm orientations in a similar workspace location as compared to when learning took place in spatially separated workspace locations, consistent with the generalization of learning mainly in intrinsic joint coordinates. In keeping with these observations, examination of how trial-to-trial adaptation generalized showed that generalization tended to be greater across similar limb postures. However, when the two fields were encountered in distinct spatial locations, the extent of generalization of adaptation to one field depended on the limb orientation in which the other field was encountered. These results suggest that three-dimensional proprioceptive limb state plays an important role in modulating generalization patterns so as to permit the best compromise between broad generalization and the simultaneous learning of conflicting skills.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Humans show a remarkable capacity to learn new motor skills. Among the most impressive aspects of this ability is the flexibility with which the motor system generalizes learned behavior to new contexts while simultaneously maintaining the capacity to learn multiple tasks with distinct and sometimes conflicting requirements. Understanding how the motor system accomplishes this feat has been a focus of many studies of skill learning during reaching (see Shadmehr 2004; Shadmehr et al. 2010; Wolpert et al. 2011 for reviews).
In particular, studies of reaching suggest that humans learn novel dynamic tasks through the adaptation of internal representations of the dynamics of the limb and environment that transform planned changes in limb state into motor commands (Lackner and Dizio 1994; Shadmehr and Mussa-Ivaldi 1994; Conditt et al. 1997). The computational elements within this internal representation have often been described in terms of a set of “basis functions” that capture the sensorimotor mapping between desired changes in limb kinematic state and required output dynamics (Mussa-Ivaldi and Giszter 1992; Pouget and Snyder 2000; Thoroughman and Shadmehr 2000; Donchin et al. 2003; Poggio and Bizzi 2004; Shadmehr 2004). The computational properties of these basis functions are presumed ultimately to reflect the tuning properties of the movement-related neural populations by which they are implemented (Zhang and Sejnowski 1999; Thoroughman and Shadmehr 2000; Donchin et al. 2003; Shadmehr 2004; Hwang and Shadmehr 2005; Thoroughman and Taylor 2005; Sing et al. 2009).
To infer these properties, psychophysical experiments have examined how learning of a new skill acquired by repeated practice generalizes to different movement directions (Gandolfo et al. 1996; Thoroughman and Shadmehr 2000; Castro et al. 2011), regions of the workspace (Shadmehr and Mussa-Ivaldi 1994; Shadmehr and Moussavi 2000; Malfait et al. 2002, 2005; Hwang et al. 2003; Berniker et al. 2014), wrist configurations (Gandolfo et al. 1996; Berniker et al. 2014) and across limbs (Criscimagna-Hemminger et al. 2003; Malfait and Ostry 2004). Generalization patterns while using the same arm are consistent with a representation of novel dynamics mainly in intrinsic (i.e., joint or muscle-based) rather than extrinsic (i.e., hand-centered Cartesian) coordinates, reflecting a mapping between time-varying changes in joint angle and joint torque rather than between hand-centered spatial velocities and forces (Shadmehr and Mussa-Ivaldi 1994; Shadmehr and Moussavi 2000; Malfait et al. 2002). However, whether learned task dynamics are indeed represented exclusively in a single reference frame (i.e., intrinsic coordinates) versus in a more mixed coordinate system is still under question (Berniker et al. 2014). There is general consensus, however, that learning of task dynamics generalizes narrowly across movement directions (Gandolfo et al. 1996; Thoroughman and Shadmehr 2000; Castro et al. 2011) but that a given local mapping between joint displacement and torque can nonetheless generalize over a broad range of workspace locations (i.e., different spatial hand positions and associated limb postures) in the horizontal plane (Shadmehr and Moussavi 2000; Malfait et al. 2002). This is consistent with a neural representation that encodes limb movement (i.e., directional displacement) locally but information about hand spatial location and associated arm posture more globally. Indeed, the activities of many cells in motor areas such as the primary motor cortex (M1) are strongly tuned to movement and force direction (Georgopoulos et al. 1982; Kalaska et al. 1989; Sergio and Kalaska 2003), show changes in tonic activity as a function of hand position (Georgopoulos et al. 1984) and encode a combination of these variables broadly across hand positions in the horizontal plane (Caminiti et al. 1990; Sergio and Kalaska 2003; Sergio et al. 2005).
In keeping with this capacity for broad generalization of adaptation, numerous studies have also provided evidence for overlap in the internal representations of task dynamics by showing that when tasks with opposing dynamic requirements (e.g., opposing force-field perturbations) are presented either serially in separate blocks of trials (Brashers-Krug et al. 1996; Gandolfo et al. 1996; Krakauer et al. 1999; Caithness et al. 2004) or in an interleaved fashion within a single trial block (Karniel and Mussa-Ivaldi 2002; Donchin et al. 2003; Hwang et al. 2003; Addou et al. 2011; Howard et al. 2013), learning of one task impedes or interferes with learning and/or recall of the other unless there are sufficient cues to dissociate the two task contexts. Although a range of potentially relevant contextual cues has been examined, there is considerable evidence to suggest that the most effective cues are those that can be used to associate unique limb states with the learning of each task (e.g., see Howard et al. 2013). These include visual and proprioceptive cues which allow each task to be associated with different spatial hand paths and/or joint configurations and displacements. For example, adaptation to opposing dynamic perturbations is possible when each field is associated with a different spatial workspace location and/or limb posture (Gandolfo et al. 1996; Hwang et al. 2003, 2006; Howard et al. 2013), reaching direction (Castro et al. 2011), a bimanual versus unimanual learning context (Nozaki et al. 2006) or distinct bimanual learning contexts (Howard et al. 2010). Notably, even when the actual limb states associated with each task are similar, substantial learning of opposing skills is also possible when spatial distinctions in visual information give rise to perceived differences in those states (Hirashima and Nozaki 2012; Howard et al. 2013). It is presumed that the capacity to learn is enhanced (i.e., “interference” caused by generalization of conflicting adaptive changes is reduced) in these conditions because it is possible to associate each dynamic skill with a unique mapping between actual or perceived limb states (e.g., velocity and position) and joint torques or muscle force and thus with distinct neural activity patterns in the neurons responsible for encoding these mappings (Hwang and Shadmehr 2005; Nozaki et al. 2006; Howard et al. 2010; Yokoi et al. 2011). However, the actual mechanisms by which this occurs remain poorly understood.
Hwang et al. (2003) began to address this issue by exploring how changes in hand spatial position within the workspace act as an effective contextual cue for reducing interference to permit the simultaneous learning of opposing skills. They used a novel paradigm in which subjects were exposed to opposing curl fields in randomly interleaved trials during movements that were similar in terms of joint displacement but made in distinct workspace locations separated by different distances. Concurrently, the extent of generalization of adaptation across the workspace was continuously monitored by examining how trial-to-trial adaptation to each field influenced reach trajectories in a null field at the center of the workspace. They showed that it was possible to learn two opposing velocity-dependent force fields when the initial hand positions associated with each field were separated by as little as 14–24 cm. This was the case despite evidence for broad generalization of dynamic learning across the workspace when a single velocity-dependent force field is learned (Shadmehr and Moussavi 2000; Malfait et al. 2002).
To explain this observation and account for the ability of their subjects to adapt to force fields that were velocity-dependent but changed with hand spatial position across the workspace, Hwang et al. (2003) proposed that the neural elements that make up the adapting sensorimotor map encode information about both movement velocity and limb position (i.e., information about velocity and position states potentially encoded in intrinsic joint and/or extrinsic spatial coordinates) in a multiplicative fashion (i.e., as a “gain field”; Andersen et al. 1985, 1990). In a theoretical study, they then used muscle spindle-like basis functions to represent a neural population with such gain-field properties. They showed that the flexibility to generalize learning broadly under some conditions and more locally in others could be explained by differences in the extent to which neurons with weak versus strong sensitivities to changes in limb position across the workspace were adapted and contributed to the behavior learned in different contexts (Hwang and Shadmehr 2005). Specifically, neurons with weak sensitivities to arm position, exhibiting directionally tuned movement activity across large portions of the workspace, would facilitate broad generalization when a single task is learned. In contrast, neurons with strong sensitivities to limb position, encoding directional movement information only in more local regions of the workspace, would generalize learning more narrowly and thus facilitate the learning of opposing skills in different workspace locations. Notably, however, these studies were limited to different workspace locations and arm postures confined to the horizontal plane. If the neural populations responsible for learning novel dynamics reflect an encoding of information about velocity and limb position states at least partially in intrinsic joint coordinates (e.g., as shown for M1 cells; Scott and Kalaska 1997), then a change in the spatial plane of the arm’s posture not only should enhance the ability to learn opposing dynamic skills at a similar spatial location but could have a strong impact on how learning generalizes across workspace locations. However, this was not tested.
The goal of the current study was to extend this previous work to investigate the influence of changes in limb orientation (i.e., a change in limb position in intrinsic coordinates but not in extrinsic coordinates) on learning and generalization. Although a number of studies have examined the capacity to learn opposing skills (i.e., extent of interference) and/or the extent of generalization of adaptation across changes in limb spatial position in the horizontal plane (Shadmehr and Mussa-Ivaldi 1994; Shadmehr and Moussavi 2000; Malfait et al. 2002, 2005; Hwang et al. 2003; Howard et al. 2013; Berniker et al. 2014), only one study examined these issues for changes in limb configuration while maintaining identical reach trajectories in Cartesian space (Gandolfo et al. 1996). In particular, Gandolfo et al. (1996) examined dynamic learning when subjects made reaching movements along the same spatial path while they grasped the handle of a robotic manipulandum in two different wrist postures. They showed that when opposing dynamic perturbations were presented in each wrist posture in multiple alternating 48-trial blocks, subjects gradually learned to compensate for both perturbations, consistent with the idea that learned dynamics are represented in an intrinsic rather than an extrinsic coordinate frame. However, in this study opposing fields were presented in each wrist posture in alternating multitrial blocks, rather than an interleaved task like that used by Hwang et al. (2003). As a result, the extent of generalization of adaptation across wrist postures could not be monitored on a trial-to-trial basis over the course of learning.
Moreover, there has been no follow-up to the Gandolfo et al. (1996) study that directly compared the relative effectiveness on reducing interference of changes in limb posture alone (i.e., limb orientation changes in a single workspace location) versus changes in posture resulting from a spatial displacement of the limb in the workspace. This is of particular interest given recent studies suggesting that dynamic learning may generalize in a mixed coordinate frame involving a combination of extrinsic and intrinsic coordinates (Berniker et al. 2014; also see Brayanov et al. 2012 for visuomotor learning) consistent with the mixture of coordinate frames reported in motor areas such as M1 (Scott and Kalaska 1997; Kakei et al. 1999; Wu and Hatsopoulos 2006; Kalaska 2009). Finally, because the work of Hwang and Shadmehr (2005) suggests that the extent to which learning generalizes across limb postures might not bear a simple relationship to the distance between reach trajectories in joint space but rather depends both on the tuning properties of the underlying neural elements and on the context in which learning takes place (e.g., learning a single dynamic task vs. multiple opposing dynamic skills), it is relevant to explore the relationship between generalization patterns (e.g., generalization extent) and interference (i.e., the capacity to which opposing skills can be learned) over a greater range of limb configurations.
In the current study, we addressed these issues by expanding the task employed in the study of Hwang et al. (2003) to investigate learning and generalization for changes in limb orientation in the same workspace location, as well as in different workspace locations. Our goal was to compare the extent to which differences in limb posture in the same versus spatially displaced workspace locations facilitate learning of opposing task dynamics while simultaneously examining how trial-to-trial adaptation generalizes in these different learning contexts. We predicted that changes in limb orientation would facilitate learning of opposing dynamics to a similar or greater extent than changes in spatial hand position across the workspace, consistent with a mainly joint-centered encoding of task dynamics. Furthermore, in keeping with the prior studies of Hwang et al. (2003) and Hwang and Shadmehr (2005), we predicted that the way in which adaptation generalized across the task space would vary considerably as a function of both limb orientation and workspace location, consistent with an important role for three-dimensional (3D) limb posture in the flexible modulation of generalization patterns. A preliminary version of these results has been presented in abstract form (Green et al. 2006).
Methods
Subjects
Twenty-four right-handed subjects (12 men, 12 women, 20–42 years of age) with no known neurological disorders and normal or corrected-to normal vision were paid a small remuneration to participate in the study and signed an institutionally approved consent form. All of the subjects were naïve to the hypotheses under study, and none had previously experienced the particular motor tasks and force perturbations under investigation. The study was approved by the Human Research Ethics Committee of the Faculté de Medecine, Université de Montréal.
Experimental setup
Subjects sat in a chair and performed a reaching task with the right hand while holding the handle of a five-link, two-bar robotic manipulandum (Interactive Motion Technologies, Cambridge, MA; Fig. 1a). Current hand position was measured using optical encoders that monitored manipulandum joint angles and two DC motors generated torques about the manipulandum joints. The position of the hand and the forces applied to the manipulandum by the hand were sampled at a rate of 400 Hz. Compensation for the inertial properties of the robot was provided by custom-written software. During experiments, the subject’s arm was wrapped in a lightly elasticized fabric bandage attached across the elbow to a rope and pulley system. This apparatus ensured that either the arm could be comfortably supported in the horizontal plane at shoulder level throughout the experiment or its orientation could be manually changed on a trial-by-trial basis between the horizontal plane position (Fig. 1a, left) and a more natural parasagittal orientation (Fig. 1a, right). A computer monitor placed vertically in front of the subject displayed target positions as well as a cursor that represented the position of the robotic handle. Handle and target positions were displayed continuously throughout each movement. Vision of the limb and rope/pulley attachment was prevented by an opaque barrier that occluded view both of the body below the neck and of the visual field to the subject’s right (i.e., of the rope/pulley system).

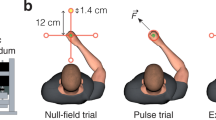
Experimental setup and tasks. a Subjects made reaching movements between targets projected on a computer monitor in front of them while holding the handle of a robotic manipulandum with their arm either supported in the horizontal plane (left) or relaxed in a parasagittal orientation (right). Vision of the limb and rope/pulley attachment used to change limb orientation on a trial-to-trial basis was prevented by an opaque barrier that occluded view of the body below the neck and of the visual field to the subject’s right. b Subjects in groups D1 and D2 were exposed to the two fields at “distant” spatial starting positions (d = ±12 cm from center), whereas subjects in groups C1 and C2 experienced the fields at starting positions that were “close” in Cartesian space (d = ±0.5 from center). During learning sets (blocks 1–5), C1 and D1 subjects made all movements with the arm supported in the horizontal plane (solid traces), while C2 and D2 subjects made movements at left and center with the arm in the horizontal plane (solid curves) and movements at right with the arm more closely aligned with the parasagittal plane (dashed curves). Large circles start targets; small circles end targets
Experimental procedure
The task paradigm was modified from Hwang et al. (2003). Subjects were randomly separated into four gender-matched groups that made reaching movements (≈10 cm length) toward the body from three pseudorandomly chosen start positions: center, left and right. Each position was associated with distinct task dynamics. Different target colors associated with each position (left: red; center: white; right: green) provided cues that could aid the subject in distinguishing the different starting locations and associated task dynamics even when the distances between them were small (see below). During movements on the left, subjects experienced a clockwise (CW) curl field that depended on hand velocity, \( \mathop{\dot{x}}\limits^{\rightarrow} \), (i.e., \( \vec{F} = B\mathop{\dot{x}}\limits^{\rightarrow} \); B = [0, 15; −15, 0] N s/m), whereas for movements on the right, subjects experienced a counterclockwise (CCW) curl field (B = [0, −15; 15, 0] N s/m). Movements at center were always unperturbed (null field). Subjects were encouraged to make each reaching movement within 500 ± 50 ms by computer-generated tones that indicated whether the movement was either too fast, too slow or the appropriate speed. At the end of each movement, the subject relaxed his/her limb so that the robot could passively move the robot handle and limb to the next starting position.
Subjects in Groups C1 and C2 encountered fields during movements to the left and right of center along hand paths that were close in Cartesian space (0.5 cm distance from center; Fig. 1b). C1 subjects made all movements with the arm in the horizontal plane at shoulder level, whereas C2 subjects encountered the CW field at left and the null field at center with the arm in the horizontal plane but the CCW field at right with the arm in the parasagittal vertical plane. Thus, subjects in both groups encountered the opposing force fields at the same workspace locations that were close in Cartesian space. However, arm positions were much further apart in intrinsic proprioceptive space for C2 subjects than for C1 subjects. Groups D1 and D2 encountered the two fields during movements that were distant in both Cartesian (12 cm distance to the left and right of center) and proprioceptive space (D1: all horizontal plane; D2: two arm orientations as for Group C2; Fig. 1b).
To replicate the experimental conditions of Hwang et al. (2003) the targets were placed such that when the arm was in the horizontal plane, all movements required the same joint angle displacements. Thus, despite differences in initial limb spatial location, horizontal plane limb movements were similar in terms of joint velocity. Note, however, that although the same spatial hand paths were encountered with the arm in the parasagittal orientation, because of the change in limb orientation the movements differed in terms of both joint velocity/displacement and position from those in the horizontal plane.
To familiarize the participants with the task, subjects practiced making reaching movements for 3 sets of 95 “baseline” trials in the null field. This was followed by 5 sets of 95 movements (“learning sets”) in which they were exposed to the different fields at left and right. In a final “transfer” set of 95 trials, C1 and D1 subjects that had performed all movements in the horizontal plane experienced the fields in two arm orientations, whereas C2 and D2 subjects that had previously made movements in two arm orientations now experienced both fields in the horizontal plane. The goal of this block was to evaluate the extent to which learning in one context (i.e., same vs. different arm orientations at left and right) generalized to the other. Note that we will refer to such generalization of learning here as “transfer” to distinguish it from generalization of trial-to-trial adaptive changes (which may or may not be associated with learning). Eight non-fielded (catch) trials (four each during movements to the left and right of center) were presented on random trials within each training or transfer block to test for the presence of aftereffects and to evaluate the extent of learning. While the order of movement locations (left, center, right) within each trial set was random, the sequence remained fixed across subjects. At the end of each experiment, the subjects were questioned as to their impression of what happened in the task and its difficulty (e.g., was there any difference in the difficulty of making movements at left vs. right or in one limb orientation vs. the other).
Data analyses
All data were analyzed off-line using MATLAB (Mathworks, Inc). Hand velocity was computed numerically using a five-point differentiation routine written in MATLAB and low-pass Butterworth filtered at 20 Hz using a digital filter with zero delay. Onset of movement was determined based on a threshold of 5 % of peak velocity. All movements were further inspected manually, and in cases where there was a clear misidentification of movement onset, the interval over which onset time could be selected was limited until an appropriate identification was made. As a measure of performance error on a given trial, we calculated the displacement perpendicular to the ideal straight-line trajectory to the target at 250 ms after movement onset (perpendicular error, PE). Other measures, including the maximum perpendicular displacement and the perpendicular displacement at peak velocity, were also examined and yielded similar results. For direct comparison with the results of Hwang et al. (2003), we used the error at 250 ms after movement onset to quantify the extent of learning within and across trial blocks by computing a unitless learning index based on measured PE that takes into account both the extent of aftereffects observed in catch trials and the perturbations caused by the force fields (Hwang et al. 2003):
Thus, when the force fields produce large perpendicular trajectory perturbations but catch trials result in relatively straight movements, the learning index is close to zero. In contrast, when trajectories during force-field trials straighten with practice, while catch trials result in trajectory displacements in the opposite direction and with similar amplitude to the perturbations initially caused by the field (i.e., aftereffects), the learning index is close to one. This would signify compensation for the field by a learned feedforward change in the motor commands. This learning index is thus based on a unitless metric of observed aftereffect, ensuring that a gradual straightening of trajectories during force-field trials over the course of learning that is not accompanied by the development of significant aftereffects (e.g., due to a strategy of arm muscle cocontraction) is not considered true feedforward learning. Learning indices were computed based on the mean change in PE for all fielded movements in each block and the mean change in PE for all catch trials in each block, as compared to the average PE during the last block of baseline null-field trials (taking into account the appropriate sign differences for errors at left vs. right). Learning indices were also computed separately for movements at left versus right to evaluate any evidence of differential learning. Note also that although we quantified learning using the same index as in Hwang et al. (2003) for consistency with this previous study, similar results were obtained using an index based on the average PE during catch trials normalized relative to the average PE for the first five force trials in each field.
Finally, to examine how adaptive changes associated with errors experienced in the course of encountering the opposing perturbations at left and right generalized on a trial-to-trial basis to movements made in the null field at center, we identified all instances of the three-trial patterns center, left field, center (CpreLCpost) and center, right field, center (CpreRCpost) in the trial sequences across all learning blocks. We calculated the difference in perpendicular error at center immediately following exposure to the field at left/right as compared to that prior to exposure to the field (i.e., error Cpost–error Cpre) as a measure of the generalization from left/right to center. The patterns of trial-to-trial changes in error at center across subject groups were similar when calculated using either estimates of perpendicular error at 250 ms post-movement onset or maximum perpendicular error. However, because trial-to-trial changes are very small, we used the maximum perpendicular error observed on each trial to improve the sensitivity of this analysis.
Statistical comparisons were based on one-way and repeated measures analyses of variance (ANOVA) using the SPSS statistics package (version 20). Unless otherwise indicated, pair-wise post hoc comparisons were performed using the Tukey (HSD) test for between-subjects factors and Bonferroni-corrected t tests for within-subjects factors with a significance level of 0.05.
Results
When subjects made reaching movements in substantially different starting arm postures, they showed an enhanced ability to simultaneously adapt to the two dynamic tasks. Figure 2a, b displays the average hand paths during the first and last training blocks for subjects that always performed the task with the arm supported in the horizontal plane (Groups D1 and C1). Movements were strongly curved in the direction of the force during the first fielded set for both groups (black solid curves) and became straighter with training (gray curves), but more so for D1 subjects who encountered the fields with a spatial separation from center of 12 cm than for C1 subjects who encountered the same fields with a spatial separation of only 0.5 cm. Furthermore, whereas Group D1 subjects (Fig. 2a) demonstrated significant aftereffects during catch trials, as evident from the curvature of their trajectories in the opposite direction to the imposed force field (dashed curves), this was not the case for Group C1 (Fig. 2b). Thus, although subjects in both groups demonstrated an increased resistance to perturbation with repeated exposure to the fields, only Group D1 showed clear evidence for actual learning of an internal representation of the opposing fields. These observations were corroborated by subjective reports. Group D1 subjects reported that the task became “easier” and/or that the “perturbation” decreased in amplitude throughout the course of the experiment. In contrast, those in subject group C1 typically reported no such change and indicated that considerable effort was required throughout the experiment to “force” or “control” the robot handle. In agreement with the results of Hwang et al. (2003), therefore, the different dynamic tasks were easier to learn when they were experienced in spatially separated starting locations and distinct limb postures.

Average trajectories across subjects in each group. Mean trajectories for subjects in groups a D1, b C1, c D2 and d C2 are shown during movements made either in the presence of a force field (solid) or during null-field “catch” trials (dashed) in the first (black) and last (gray) learning blocks. Dotted black lines indicate average baseline trajectories
To investigate whether differences in initial limb position in extrinsic (spatial or body-centered) coordinates facilitate learning of multiple dynamic fields to a similar extent as purely joint-based (intrinsic) changes in initial limb state, we compared learning in subjects that always experienced the fields with the arm supported in the horizontal plane with those of subjects who experienced the fields in different arm orientations. Specifically, Groups D2 and C2 experienced both the CW field at left and null field at center in the horizontal plane but encountered the CCW field at right with the arm more closely aligned with the parasagittal plane. As expected, when limb position differed significantly in both Cartesian and proprioceptive space (Group D2; Fig. 2c), subjects not only straightened their trajectories but, similar to D1 subjects, demonstrated aftereffects consistent with at least partial learning of the two fields. Notably, the same was also true for subjects in Group C2 (Fig. 2d) whose starting limb positions were similar in Cartesian space (as for C1 subjects) but differed in proprioceptive space. Thus, substantial differences in initial proprioceptive state alone were sufficient for learning to take place.
Also evident in Groups D2 and C2 was that their average trajectories at center were significantly deviated to the right compared to baseline trajectories even though the movements were made in the null field (Fig. 2c, d). This rightward bias, consistent with the direction of the aftereffects observed at left during catch trials, increased with repeated exposure to the fields and was significantly larger for Group C2 than Group D2 [F(1,284) = 13.9, p < 0.001]. Such deviations were not evident during central movements in either Group C1 or D1 subjects. These observations suggest that whereas adaptation at left and right generalized to center to similar extents in Group C1 and D1 subjects, center movements in Group C2 and D2 subjects reflected greater generalization of adaptation to the field at left than the field at right.
These general observations are summarized in Fig. 3, in which adaptation to the fields was quantified by a learning index that takes into account the performance in both field and catch trials based on the perpendicular error at 250 ms after movement onset (see “Methods” section; Hwang et al. 2003). Comparison of these indices for all groups across learning sets (Fig. 3a) revealed a statistically significant effect on learning index of both subject group and block number as well as a significant interaction [F(3,20) = 8.91, p = 0.001 for group; F(4,80) = 32.9, p < 0.001 for block; F(12,80) = 2.30, p < 0.05 for block-group interaction]. Post hoc analyses showed that learning indices remained close to zero for C1 subjects and block number had no significant effect [F(4,20) = 1.87, p = 0.16], indicating that increased practice did not improve the performance of this subject group. In contrast, Groups C2, D1 and D2 all exhibited clear evidence for learning with indices that became statistically greater than those of Group C1 subjects as early as the first block of exposure to the fields for Group D2 [F(3,20) = 3.6, p < 0.05; post hoc comparisons, p < 0.05] and as early as the second block for Groups C2 and D1 [F(3,20) = 3.32, p < 0.05; post hoc comparisons, p < 0.05]. Comparison of the learning indices across groups over the last 3 learning blocks (i.e., where a stable level of learning had been reached) showed that the extent of learning was similar for all groups exposed to the fields in different regions of proprioceptive space (Groups C2, D1 and D2) regardless of whether initial limb positions in Cartesian space were similar (Group C2) or different (Groups D1 and D2) [F(2,15) = 0.49, p = 0.62]. Note also that the extent of learning achieved for these groups (mean learning indices in learning block 5: D1 = 0.62; D2 = 0.62; C2 = 0.54) was consistent with that observed in the previous study of Hwang et al. (2003) under similar experimental conditions as those for Group D1 [mean learning index in learning block 5 of ≈0.6 for Group 4 of Hwang et al. (2003)].

Learning performance as a function of subject group. a Average learning index across learning (L) and transfer (T) blocks for subjects in each group. D1 solid gray; D2 dashed gray; C1 solid black; C2 dashed black; circles all movements in the horizontal plane limb orientation; squares horizontal limb orientation at left and center and parasagittal orientation at right. b Mean learning indices across all learning blocks calculated separately for adaptation to the field at left (gray) and right (black) for each subject group. Error bars indicate standard error
Learning achieved in distinct limb orientations did not transfer to or facilitate the learning of force fields encountered in a single limb orientation. In particular, after completing 5 learning blocks in the task conditions defined for each group, the subjects then performed a “transfer” block (T in Fig. 3a) in which the arm orientation with which they reached at the right side of the workspace was reversed. As a result, subjects that had encountered both fields in the horizontal plane (Groups C1 and D1) were now exposed to the fields in two arm orientations while those that practiced in two orientations now encountered both fields in the horizontal plane (Groups C2 and D2). This resulted in only a modest decrease in the performance of Groups D1 and D2 (Fig. 3a). In contrast, in the transfer block C2 subjects showed no evidence of prior learning, exhibiting performance similar to that of C1 subjects (Figs. 3a, 4). The learning index for Group C2 dropped to close to zero in the transfer block such that learning was statistically indistinguishable from that of Group C1 at the end of learning [F(1,11) = 3.87, p = 0.08]. This indicated that for Group C2 subjects, learning the opposing fields in two arm orientations did not transfer to or appear to facilitate subsequent learning in a single arm orientation when the fields were encountered in similar workspace locations. Finally, after a single transfer block, C1 subjects failed to demonstrate a significant increase in performance when exposed to the opposing fields in two arm orientations [F(1,5) = 0.25, p = 0.64].

Transfer of learning across limb orientations. Mean trajectories for subjects in groups a C1 and b C2 in the last learning block (gray traces) are compared with those in a transfer block (black traces) in which subjects that had learned in a single limb orientation (Group C1) were now exposed to the fields in two limb orientations, whereas those that had learned in two limb orientations (Group C2) were now exposed to the fields in a single limb orientation. Solid lines force field trials; dashed lines null-field “catch” trials; dotted lines average baseline trajectories
To investigate whether this simply reflected insufficient practice under the new task conditions, 5 subjects in Group C1 and 4 subjects in Group C2 performed two additional transfer blocks (T2 and T3 in Fig. 3a). Notably, learning in C1 subjects increased dramatically, attaining performance levels similar to those of C2 subjects during learning blocks. However, there was no evidence for an improvement in the performance of C2 subjects; learning the opposing fields in two arm orientations had no apparent facilitatory effect on subsequent performance in a single arm orientation. The C2 subjects now showed the same poor performance originally demonstrated by C1 subjects during the learning blocks.
These results are consistent with generalization across similar limb postures giving rise to persistent interference (e.g., Group C1) and show that exposure to each field in a different region of proprioceptive space provides a sufficient context for simultaneous learning of multiple dynamic tasks. Although the goal in examining null-field trials at center was to use them as a probe to explore generalization of adaptation across limb orientations and workspace locations, it is also possible that they could interfere with learning in a posture-dependent way. If true, then because C2 subjects were exposed to both the CW field at left and the null field at center in similar limb postures, but to the CCW field at right in a significantly different arm orientation one might expect the execution of null-field trials at center to “interfere” to a greater extent with learning of the CW field at left than the CCW field at right. Consequently, one might predict better learning at right than at left. An examination of the learning indices at right and left separately for Group C2 revealed that this was indeed the case [F(1,58) = 12.9, p = 0.001]. However, learning indices at right were also higher for the other subject groups with the difference reaching significance for all groups with the exception of Group D1 [F(1,58) = 18.1, p < 0.001 for C1; F(1,58) = 16.9, p < 0.001 for D2; F(1,58) = 0.22, p = 0.64 for D1], suggesting that differences in the extent of learning at right versus left likely reflected additional factors other than simply interference with the null field at center (e.g., biomechanical considerations). Importantly, while learning indices were on average somewhat lower at left than at right, the general conclusions drawn on the basis of comparisons across groups using the combined left–right index also held for learning at left and right considered separately.
A more detailed examination of how perpendicular error varied on a trial-to-trial basis provided clear evidence for differences in generalization across trajectories depending on their similarity in joint coordinates. Figure 5 illustrates the mean perpendicular error measured at 250 ms after movement onset in each trial averaged across subjects in each group and plotted as a sequential-trial time series. Gradual decreases in mean error magnitude at left and right accompanied by an increase in catch-trial aftereffects (circles) were observed for subjects in Groups D1, D2 and C2 but not for Group C1 in keeping with the fact that subjects in the C1 group were unable to learn the two force fields simultaneously when presented in interleaved trials. Also evident in Group C2 (Fig. 5d) is that at the start of the transfer block, when C2 subjects now began to experience both fields with the arm in the horizontal plane, there was an abrupt increase in error at right to an amplitude similar to that observed for the initial trials in the first learning block. Thus, the learning acquired in the parasagittal posture did not appear to generalize to the horizontal plane arm orientation. This abrupt increase in error at right was accompanied by a somewhat more gradual increase at left and an elimination of aftereffects. This suggests that the learning previously acquired at left was also lost during the transfer block as a result of the “interference” now caused by generalization of adaptation to the CCW field at right to the similar posture at which the CW field was experienced at left. Conversely, errors for Group C1 tended to decrease during the transfer block as the subjects began to learn the opposing tasks in the two distinct arm orientations.

Movement errors. Perpendicular error at 250 ms after movement onset averaged across subjects in groups a D1, b C1, c D2 and d C2 and plotted as a function of trial number. Circles indicate the error on catch trials. Error bars (gray lines) indicate standard deviation
Of particular interest was the impact of learning on the null-field trials at center. As in the earlier study of Hwang et al. (2003), when reaching in similar workspace locations (i.e., Groups C1 and C2), the trial-to-trial changes in error observed at center appeared greater during learning compared to baseline blocks, presumably reflecting generalization of trial-to-trial adaptation to the force fields to center movements. However, an even more striking observation was the clear deviation in the mean error at center for the subject groups that experienced the field in two arm orientations. Notice that despite trial-to-trial variability in the perpendicular error at center, on average this error remained close to zero for Group C1 (Fig. 5b) but hovered around 0.5 cm to the right across the learning blocks for Group C2 (Fig. 5d) reflecting greater generalization of adaptation to the field at left than the field at right to center movements (also see Fig. 2b, d). A similar observation could be made to a lesser degree when comparing Groups D1 and D2 (Figs. 2a, c and 5a, c).
Mean errors at center exhibited by each subject group across all trials during learning blocks and the transfer block are summarized in Fig. 6a. It can be seen that during the five initial learning blocks, Groups D2 and C2 exhibited significantly more positive (rightward) errors than those of Groups C1 and D1 [F(3,568) = 194.7, p < 0.001]. However, this rightward bias at center decreased substantially during the transfer block, consistent with a similar extent of generalization of adaptation to both the right and left fields when all movements were now made with the arm supported in the horizontal plane.

Generalization of adaptation to center. a Mean error 250 ms after movement onset at center across all learning block trials (black) and transfer block trials (gray) for each subject group normalized relative to the average error at center in the last half of the last baseline block. b Average trial-to-trial change in maximum perpendicular error at center across all learning blocks due to an intervening field trial at left (gray) or right (black) for each subject group. Error bars indicate standard error
Finally, to explore in more detail how the bias in mean error at center arose we examined generalization at the level of individual trials by examining the influence of an intervening field trial on changes in error at center (see “Methods” section). Average trial-to-trial changes associated with exposure to either the left or right field are summarized for each subject group in Fig. 6b. As expected, average deviations at center were toward the right after exposure to the leftward (CW) field and toward the left after exposure to the rightward (CCW) field, consistent with trial-to-trial adaptation to the previously experienced perturbation and with generalization of that adaptation to center. For Group C1 subjects, these oppositely directed error changes were close in amplitude for the two fields, in keeping with a similar extent of generalization to center of the adaptation to each field when experienced in similar postures. In contrast, while average error changes after exposure to the field at left were not significantly different for Groups C1 and C2 [F(3,229) = 3.87, p < 0.01; post hoc comparison, p = 0.72], those associated with exposure to the field at right were smaller for Group C2 as compared to C1 [F(3,247) = 4.87, p < 0.01; Fisher LSD post hoc comparison, p < 0.05], consistent with less generalization of right field adaptation to center when the right field was encountered in a distinct arm posture. Similarly, for Group D1 subjects, who encountered both right and left fields in distinct postures from the null field at center, average error changes due to both fields were smaller than those for Group C1, although the difference only reached significance for the right field [F(3,247) = 4.87, p < 0.01; post hoc comparison, p < 0.05]. Notably, and somewhat surprisingly, however, error changes due to both right and left fields were significantly larger for Group D2 than those for Group D1 [F(3,229) = 3.87, p < 0.01; post hoc comparison, p < 0.05 for left; F(3,247) = 4.87, p < 0.01; post hoc comparison, p < 0.05 for right] and in fact statistically indistinguishable from those in Group C1 (post hoc comparisons, p > 0.05). This was true despite the fact that reach trajectories for Groups D1 and D2 were executed in the same posture at left, suggesting that the way adaptation generalized in the two groups was strongly influenced by the different arm orientations in which learning took place at right.
Discussion
In this study, we compared the effectiveness of changes in limb posture in similar versus different workspace locations in facilitating the simultaneous learning of opposing dynamic perturbations and evaluated how generalization changes as a function of these factors. We showed that when opposing curl-field perturbations were presented in an interleaved fashion during movements in similar workspace locations and arm orientations (Group C1), subjects failed to learn the opposing dynamic tasks despite the presence of color cues that could potentially aid in distinguishing the different task dynamics (Hwang et al. 2003; Howard et al. 2013). In contrast, significant learning took place whenever the opposing tasks were encountered in spatially separated workspace locations and/or different limb orientations such that each could be associated with distinct proprioceptive states (Groups C2, D1, D2). An examination of how trial-to-trial adaptation generalized showed that generalization tended to be greater across similar limb postures. Importantly, however, the extent of generalization of a learned task also depended on task context. When opposing fields were encountered in spatially separated locations, the extent of generalization of adaptation to one field depended on the limb orientation in which the other field was encountered. Below we discuss these findings in the context of previous studies and their implications for the role of limb posture in facilitating multiskill learning.
Role of proprioceptive state in facilitating simultaneous learning of opposing skills
The results of the current study are consistent with those of previous studies, showing that changes in workspace location provide a sufficient context for simultaneous learning of opposing dynamic tasks (Hwang et al. 2003, 2006; Howard et al. 2013). They are also compatible with the results of Gandolfo et al. (1996), who showed that changes in distal wrist posture were sufficient to reduce interference during learning of opposing force fields encountered when reaching along the same spatial hand path. Notably, however, the change in arm orientation in the current study was more substantial, significantly altering the joint displacements associated with reaching in each field particularly at the shoulder and to a lesser extent at the elbow. Thus, as predicted, our findings confirm and provide additional support for the notion that the neural elements that make up the sensorimotor map which is adapted encode movement parameters in a coordinate frame that is closely linked to intrinsic joint or muscle-centered coordinates.
The current study also extends previous work by directly comparing the extent to which changes in limb posture in a single workspace location versus those accompanied by a spatial displacement of the limb (i.e., movements in distinct workspace locations) impact on reducing interference. Under the simple assumption that learned dynamics reflect the acquisition of a novel mapping between joint displacement and torque (e.g., Shadmehr and Mussa-Ivaldi 1994), one might have expected greater interference and less learning for subjects in Group D1 than those in Groups C2 and D2. This is because D1 subjects made reaching movements that were similar in terms of joint displacement (despite being spatially separated), whereas C2 and D2 subjects reached in two dramatically different arm orientations such that the movements associated with each field were distinct in terms of both initial joint position and displacement. Notably, however, we found that this was not the case. On average, subjects learned to a similar extent regardless of whether they encountered the two fields in spatially separated workspace locations (Groups D1 and D2) or in two limb orientations in similar spatial locations (Group C2) and regardless of whether the movements differed only in terms of initial joint position (Group D1) or in terms of both joint position and displacement (Groups C2 and D2). These observations have at least two important implications.
First, the finding that a separation of reach trajectories in Cartesian space did not appear to reduce interference more than changes in limb orientation alone suggests that learning in these experiments was mediated by neural elements encoding information about limb state mainly in an intrinsic reference frame. Second, as previously pointed out by Hwang et al. (2003), the fact that D1 subjects were able to learn opposing fields despite their association with movements that were similar in terms of joint displacement (i.e., they differed only in terms of initial position) suggests that the tuning properties of the neural elements underlying adaptation reflect more than a simple mapping between joint displacement and torque but rather a nonlinear combination of movement parameters (e.g., velocity and position encoded as a gain field). Our current results provide further support for this suggestion by showing that C2 and D2 subjects did not show better learning than D1 subjects despite trajectories that were distinct in terms of joint displacement.
Influence of limb state on the flexible generalization of adaptation
A particularly important aspect of the current investigation is that the task structure we employed allowed us to directly monitor how trial-to-trial adaptation generalized to the null field at center. In keeping with the previous observations of Hwang et al. (2003) when movements were made in the horizontal plane, smaller trial-to-trial changes in error at center were observed when adaptation took place in spatially distant locations (Group D1, Figs. 5a, 6b) than when both fields were encountered close to center (Group C1; Figs. 5b, 6b). This is consistent with reduced trial-to-trial generalization across substantially different limb positions. In the current study, we extended these observations by showing that a difference in limb orientation in the same workspace location also reduced generalization of adaptation to center. Specifically, when both fields were encountered close to center but with the arm oriented in the horizontal plane at left and in the parasagittal plane at right (Group C2), errors at center quickly became biased to the right. This is consistent with greater generalization to center of adaptation to the CW field at left than of the adaptation to the CCW field at right.
We confirmed this interpretation by explicitly examining how perpendicular error at center was influenced on a trial-by-trial basis by an intervening force-field trial at left or right (Fig. 6b). As expected, error changes at center due to an intervening field trial at left versus right were oppositely directed and of similar amplitude for Group C1, but those due to the right field were significantly reduced in Group C2 as compared to C1. Similarly, error changes due to both right and left fields for Group D1 were smaller than those for Groups C1 and C2 although differences between Groups D1 and C2 did not reach significance. Thus, the pattern of generalization to center observed across Groups C1, D1 and C2 bore a close and inverse relationship to the extent to which subjects were able to learn.
Most interesting, however, was the finding that the extent of generalization to center was not fixed but rather was strongly influenced by the state of the limb when encountering the opposing field. In particular, despite the fact that reach trajectories at left for Groups D1 and D2 were executed in identical postures and workspace locations, and despite comparable levels of learning for the two groups (Fig. 3a), error changes at center for Group D2 were significantly larger than those for Group D1 (Fig. 6b). Thus, the extent to which adaptation to the left field generalized across the workspace was strongly influenced by the change in limb orientation at right. Furthermore, despite the fact that movements at right and center were similar in terms of joint displacement for Group D1 but differed in terms of both joint displacement and position for Group D2, generalization of trial-to-trial adaptation from right to center was significantly larger for Group D2 than Group D1 and comparable to that for Group C1.
While these observations at first appear surprising and conflict with the notion that there is a simple relationship between distance in joint space and the extent to which learning generalizes, they can nonetheless be interpreted in a manner consistent with the theoretical framework proposed by Hwang and Shadmehr (2005). Specifically, they proposed that the basis functions or neural elements that make up the adapting sensorimotor map encode information about both joint velocity (movement) and position as a gain field (i.e., multiplicatively) and that these elements exhibit a range of sensitivities to changes in limb position. Those elements with low sensitivities to changes in limb position encode joint velocity broadly across the workspace (“wide bases”), while those with high sensitivities to position changes encode joint velocity across position space only locally (“narrow bases”). Thus, the capacity to generalize learning broadly after learning a single field (e.g., up to 80 cm away; Shadmehr and Moussavi 2000) could be explained by the adaptation of “wide bases.” In contrast, when learning opposing dynamic fields with spatial separations as small as 14–24 cm, learning would be mediated mainly by “narrow bases” resulting in only very local generalization.
These same principles could explain our current experimental observations. Because D1 subjects encountered opposing fields while making movements that were similar in terms of joint displacement, the basis elements (or neural populations) contributing to each skill should have possessed similar tuning for joint velocity. To avoid persistent interference, their contributions to each task had to be partitioned according to limb position. Thus, learning of each field is likely to have been mediated mainly by “narrow bases” that generalized a learned mapping between joint velocity and torque only very locally across limb positions. In contrast, D2 subjects encountered each field while making movements that differed in terms of both joint position and displacement. Consequently, unlike the case of D1 subjects, the basis elements contributing to each skill were already at least partially distinct in terms of their tunings for joint velocity. Because their contributions to learning each skill did not have to be partitioned solely on the basis of limb position, there would have been freedom to also learn using “wide bases” that generalized that learning more broadly across limb postures to center. Notably, while we speculate that distinctions in the way that D1 and D2 subjects partitioned the neural elements associated with reaching in each context arose largely over the course of the learning blocks, recent work suggests the possibility that this process could in fact have begun earlier as subjects perfected their reaching movements in distinct limb postures during the baseline blocks (Verstynen and Sabes 2011). At present, however, this is only one potential explanation for our observations. To help confirm this interpretation, future work should compare generalization of learning of a single dynamic perturbation across both limb orientations and workspace locations to generalization patterns when multiple skills are learned with the limb in different configurations and starting locations. Furthermore, experiments involving movements made fully in 3D (i.e., movements not confined to the horizontal plane) will be required to truly dissociate the effects of differences in 3D limb posture versus joint displacement in modulating generalization patterns to permit the simultaneous learning of multiple skills.
Collectively, these results suggest that the capacity to assume distinct limb postures in 3D when performing different tasks plays an important role in the simultaneous learning of conflicting skills by helping to associate each task with a distinct neural “basis set.” This is compatible with the fact that humans make active use of a broad range of possible 3D limb postures when executing arm movements (Soechting et al. 1995; Trumbower et al. 2009). Furthermore, brain regions such as M1 that have been implicated in learning of novel dynamics (Gandolfo et al. 2000; Li et al. 2001; Arce et al. 2010a, b; Cherian et al. 2013) show modulation in directional activity as a function of both hand position in the workspace and limb orientation (Caminiti et al. 1990; Scott and Kalaska 1997; Sergio and Kalaska 2003). Indeed, a potential advantage of the complex mixture of signals and reference frames found in M1 (Scott and Kalaska 1997; Kakei et al. 1999; Wu and Hatsopoulos 2006; Kalaska 2009) may be that it permits the flexible modulation of generalization patterns as appropriate to ensure the best compromise between broad generalization and the simultaneous learning of multiple distinct skills. Investigating the neural basis for such flexible generalization will be an important next step.
References
Addou T, Krouchev N, Kalaska JF (2011) Colored context cues can facilitate the ability to learn and to switch between multiple dynamical force fields. J Neurophysiol 106:163–183
Andersen RA, Essick GK, Siegel RM (1985) Encoding of spatial location by posterior parietal neurons. Science 230:456–458
Andersen RA, Bracewell RM, Barash S, Gnadt JW, Fogassi L (1990) Eye position effects on visual, memory, and saccade-related activity in areas LIP and 7a of macaque. J Neurosci 10:1176–1196
Arce F, Novick I, Mandelblat-Cerf Y, Israel Z, Ghez C, Vaadia E (2010a) Combined adaptiveness of specific motor cortical ensembles underlies learning. J Neurosci 30:5415–5425
Arce F, Novick I, Mandelblat-Cerf Y, Vaadia E (2010b) Neuronal correlates of memory formation in motor cortex after adaptation to force field. J Neurosci 30:9189–9198
Berniker M, Franklin DW, Flanagan JR, Wolpert DM, Kording K (2014) Motor learning of novel dynamics is not represented in a single global coordinate system: evaluation of mixed coordinate representations and local learning. J Neurophysiol 111:1165–1182
Brashers-Krug T, Shadmehr R, Bizzi E (1996) Consolidation in human motor memory. Nature 382:252–255
Brayanov JB, Press DZ, Smith MA (2012) Motor memory is encoded as a gain-field combination of intrinsic and extrinsic action representations. J Neurosci 32:14951–14965
Caithness G, Osu R, Bays P et al (2004) Failure to consolidate the consolidation theory of learning for sensorimotor adaptation tasks. J Neurosci 24:8662–8671
Caminiti R, Johnson PB, Urbano A (1990) Making arm movements within different parts of space: dynamic aspects in the primate motor cortex. J Neurosci 10:2039–2058
Castro LN, Wu HG, Smith MA (2011) Adaptation to dynamic environments displays local generalization for voluntary reaching movements. In: Conference proceedings of the IEEE engineering in medicine and biology society, pp 4050–4052
Cherian A, Fernandes HL, Miller LE (2013) Primary motor cortical discharge during force field adaptation reflects muscle-like dynamics. J Neurophysiol 110:768–783
Conditt MA, Gandolfo F, Mussa-Ivaldi FA (1997) The motor system does not learn the dynamics of the arm by rote memorization of past experience. J Neurophysiol 78:554–560
Criscimagna-Hemminger SE, Donchin O, Gazzaniga MS, Shadmehr R (2003) Learned dynamics of reaching movements generalize from dominant to nondominant arm. J Neurophysiol 89:168–176
Donchin O, Francis JT, Shadmehr R (2003) Quantifying generalization from trial-by-trial behavior of adaptive systems that learn with basis functions: theory and experiments in human motor control. J Neurosci 23:9032–9045
Gandolfo F, Mussa-Ivaldi FA, Bizzi E (1996) Motor learning by field approximation. Proc Natl Acad Sci USA 93:3843–3846
Gandolfo F, Li C, Benda BJ, Schioppa CP, Bizzi E (2000) Cortical correlates of learning in monkeys adapting to a new dynamical environment. Proc Natl Acad Sci USA 97:2259–2263
Georgopoulos AP, Kalaska JF, Caminiti R, Massey JT (1982) On the relations between the direction of two-dimensional arm movements and cell discharge in primate motor cortex. J Neurosci 2:1527–1537
Georgopoulos AP, Caminiti R, Kalaska JF (1984) Static spatial effects in motor cortex and area 5: quantitative relations in a two-dimensional space. Exp Brain Res 54:446–454
Green AM, Labelle J-P, Shadmehr R, Kalaska JF (2006) The influence of proprioceptive state on learning control of reach dynamics. In: Society for neuroscience meeting, vol Program No. 57.23. Neuroscience Meeting Planner, Atlanta, GA
Hirashima M, Nozaki D (2012) Distinct motor plans form and retrieve distinct motor memories for physically identical movements. Curr Biol 22:432–436
Howard IS, Ingram JN, Wolpert DM (2010) Context-dependent partitioning of motor learning in bimanual movements. J Neurophysiol 104:2082–2091
Howard IS, Wolpert DM, Franklin DW (2013) The effect of contextual cues on the encoding of motor memories. J Neurophysiol 109:2632–2644
Hwang EJ, Shadmehr R (2005) Internal models of limb dynamics and the encoding of limb state. J Neural Eng 2:S266–S278
Hwang EJ, Donchin O, Smith MA, Shadmehr R (2003) A gain-field encoding of limb position and velocity in the internal model of arm dynamics. PLoS Biol 1:E25
Hwang EJ, Smith MA, Shadmehr R (2006) Dissociable effects of the implicit and explicit memory systems on learning control of reaching. Exp Brain Res 173:425–437
Kakei S, Hoffman DS, Strick PL (1999) Muscle and movement representations in the primary motor cortex. Science 285:2136–2139
Kalaska JF (2009) From intention to action: motor cortex and the control of reaching movements. Adv Exp Med Biol 629:139–178
Kalaska JF, Cohen DA, Hyde ML, Prud’homme M (1989) A comparison of movement direction-related versus load direction-related activity in primate motor cortex, using a two-dimensional reaching task. J Neurosci 9:2080–2102
Karniel A, Mussa-Ivaldi FA (2002) Does the motor control system use multiple models and context switching to cope with a variable environment? Exp Brain Res 143:520–524
Krakauer JW, Ghilardi MF, Ghez C (1999) Independent learning of internal models for kinematic and dynamic control of reaching. Nat Neurosci 2:1026–1031
Lackner JR, Dizio P (1994) Rapid adaptation to Coriolis force perturbations of arm trajectory. J Neurophysiol 72:299–313
Li CS, Padoa-Schioppa C, Bizzi E (2001) Neuronal correlates of motor performance and motor learning in the primary motor cortex of monkeys adapting to an external force field. Neuron 30:593–607
Malfait N, Ostry DJ (2004) Is interlimb transfer of force-field adaptation a cognitive response to the sudden introduction of load? J Neurosci 24:8084–8089
Malfait N, Shiller DM, Ostry DJ (2002) Transfer of motor learning across arm configurations. J Neurosci 22:9656–9660
Malfait N, Gribble PL, Ostry DJ (2005) Generalization of motor learning based on multiple field exposures and local adaptation. J Neurophysiol 93:3327–3338
Mussa-Ivaldi FA, Giszter SF (1992) Vector field approximation: a computational paradigm for motor control and learning. Biol Cybern 67:491–500
Nozaki D, Kurtzer I, Scott SH (2006) Limited transfer of learning between unimanual and bimanual skills within the same limb. Nat Neurosci 9:1364–1366
Poggio T, Bizzi E (2004) Generalization in vision and motor control. Nature 431:768–774
Pouget A, Snyder LH (2000) Computational approaches to sensorimotor transformations. Nat Neurosci 3(Suppl):1192–1198
Scott SH, Kalaska JF (1997) Reaching movements with similar hand paths but different arm orientations. I. Activity of individual cells in motor cortex. J Neurophysiol 77:826–852
Sergio LE, Kalaska JF (2003) Systematic changes in motor cortex cell activity with arm posture during directional isometric force generation. J Neurophysiol 89:212–228
Sergio LE, Hamel-Paquet C, Kalaska JF (2005) Motor cortex neural correlates of output kinematics and kinetics during isometric-force and arm-reaching tasks. J Neurophysiol 94:2353–2378
Shadmehr R (2004) Generalization as a behavioral window to the neural mechanisms of learning internal models. Hum Mov Sci 23:543–568
Shadmehr R, Moussavi ZM (2000) Spatial generalization from learning dynamics of reaching movements. J Neurosci 20:7807–7815
Shadmehr R, Mussa-Ivaldi FA (1994) Adaptive representation of dynamics during learning of a motor task. J Neurosci 14:3208–3224
Shadmehr R, Smith MA, Krakauer JW (2010) Error correction, sensory prediction, and adaptation in motor control. Annu Rev Neurosci 33:89–108
Sing GC, Joiner WM, Nanayakkara T, Brayanov JB, Smith MA (2009) Primitives for motor adaptation reflect correlated neural tuning to position and velocity. Neuron 64:575–589
Soechting JF, Buneo CA, Herrmann U, Flanders M (1995) Moving effortlessly in three dimensions: does Donders’ law apply to arm movement? J Neurosci 15:6271–6280
Thoroughman KA, Shadmehr R (2000) Learning of action through adaptive combination of motor primitives. Nature 407:742–747
Thoroughman KA, Taylor JA (2005) Rapid reshaping of human motor generalization. J Neurosci 25:8948–8953
Trumbower RD, Krutky MA, Yang BS, Perreault EJ (2009) Use of self-selected postures to regulate multi-joint stiffness during unconstrained tasks. PLoS One 4:e5411. doi:10.1371/journal.pone.0005411
Verstynen T, Sabes PN (2011) How each movement changes the next: an experimental and theoretical study of fast adaptive priors in reaching. J Neurosci 31:10050–10059
Wolpert DM, Diedrichsen J, Flanagan JR (2011) Principles of sensorimotor learning. Nat Rev Neurosci 12:739–751
Wu W, Hatsopoulos N (2006) Evidence against a single coordinate system representation in the motor cortex. Exp Brain Res 175:197–210
Yokoi A, Hirashima M, Nozaki D (2011) Gain field encoding of the kinematics of both arms in the internal model enables flexible bimanual action. J Neurosci 31:17058–17068
Zhang K, Sejnowski TJ (1999) A theory of geometric constraints on neural activity for natural three-dimensional movement. J Neurosci 19:3122–3145
Acknowledgments
We thank J. Kalaska and P. Cisek for comments on the manuscript and R. Shadmehr for helpful discussions. This work was supported by operating grants from the Canadian Institutes for Health Research (MOP 84454) and the National Institutes of Health Research (R01 NS046033).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Green, A.M., Labelle, JP. The influence of proprioceptive state on learning control of reach dynamics. Exp Brain Res 233, 2961–2975 (2015). https://doi.org/10.1007/s00221-015-4366-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-015-4366-x