
Abstract
In this paper, a new multi-objective approach is suggested, known as multi-objective backtracking search algorithm (MOBSA) in order to formulate and solve the optimal power flow (OPF) problem in power systems. Many objective functions are considered like fuel cost, power losses, and voltage deviation. The structure of the proposed method is simple and has one control parameter. In addition, MOBSA is able to solve the highly constrained objectives. A fuzzy membership technique is integrated into the BSA algorithm to extract the best compromise solution from all the obtained Pareto optimal solutions. Furthermore, the capability of the MOBSA approach is evaluated and verified for bi- and tri-objectives, and tested on three standard IEEE power systems, small network 30-bus, medium network 57-bus, and large network 118-bus test systems. The obtained results reveal that the proposed method is efficient to generate well-distributed Pareto optimal non-dominated solutions. Likewise, the comparison analysis with some re-implemented methods as MODE, SPEA, MALO, and those found in the literature as MOABC/D, QOTLBO, NSGA-II and NSMOGSA, assured the superiority, effectiveness, and robustness of MOBSA.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Power flow (PF) is becoming one of the most fundamental issues in power system, and the basic idea of the PF analysis which is also known as load flow analysis is to find out the voltage at different buses, power injection on lines, and total system power losses for any given operating conditions. Additionally, the optimal power flow (OPF) is a nonlinear, non-convex, and large-scale problem, which leads to optimize several objective functions by determining optimum settings of control variables, and satisfying a set of equality and inequality constraints. Generally, the control variables set contains the generator real powers, voltages of generation buses, tap setting of regulating transformers, and reactive power of shunt capacitors, whereas the objective functions were formulated as decreasing the total fuel cost, active power losses, and voltage deviation. The first authors who introduced the formulation of the OPF problem are Dommel and Tinney [1]. The popular numerical methods for solving the power flow equations are the Newton–Raphson (N-R) [2], Gauss–Seidel (G-S) [3], and fast decoupled (FD) methods [4].
Furthermore, the OPF problem can be solved via two kinds of methods, traditional and intelligent optimization algorithms. As traditional methods, several have been applied such as linear and nonlinear programming [5], quadratic programming [6], interior point method [7], and the \(\varepsilon \)-constraint methods [8]. However, those methods are usually slow in convergence, require heavy computational cost, and have multiple local minimum points. In earlier years, metaheuristic optimization methods are widely applied in searching for optimal solutions in large-scale problems of engineering, computer science, and business. They work by guiding the searching in a solution space to find the optimal. Those intelligent methods have been used for the global optimization problem. Numerous metaheuristic optimization techniques have been published lately such as black widow optimization (BWO) [9], salp swarm algorithm (SSA) [10], intensify harris hawks optimizer (IHHO) [11], hybrid harris hawks optimizer (hHHO-IGWO) [12], henry gas solubility optimization (HGSO) [13], hybrid grey wolf optimizer (hGWO) [14], manta ray foraging optimization (MRFO) [15], and so on. Recently, many researchers have tended to apply intelligent methods for solving the OPF problem such as differential evolution (DE) [16], ameliorated dragonfly algorithm (ADFA) [17], particle swarm optimization (PSO) [18], ant colony optimization (AC) [19], genetic algorithm (GA) [20], evolutionary algorithm (EA) [21], modified shuffle frog leaping algorithm (MSFLA) [22], gray wolf optimizer (GWO) [23], sine cosine algorithm (SCA) [24], and hybrid biogeography-based optimization (BBO) [25]. All the previous techniques have just considered single-objective OPF problems.
In recent years, several methods are applied to solve the multi-objective OPF problems (MOOPF). Generally, multi-objective optimal power flow problem is described as a highly large-scale and nonlinear constrained optimization. Among these methods, a modified artificial bee colony algorithm is developed, and the objectives are combined using fuzzy logic to form one single-objective function [26]. A decomposition-based memetic algorithm for multi-objective capacitated arc routing problem is improved [27]. An improved artificial bee colony algorithm based on Pareto is presented for solving the multi-objective dynamic optimal power flow problem [28]. An artificial bee colony algorithm based on decomposition (MOABC/D) in [29] is employed for multi-objective OPF. Ghasemi et al. [30] (Multi-objective optimal electric power planning in the power system using Gaussian bare-bones imperialist competitive algorithm) have attempted non-dominated sorting procedure to get a trade-off between two or more conflicting objectives simultaneously. An improved strength Pareto evolutionary algorithm is proposed to deal with the multi-objective OPF by considering the fuel cost and emission [31]. A quasi-oppositional modified Jaya algorithm is introduced for multi-objective optimal power flow [32]. A modified decomposition-based multi-objective OPF problem is solved with the consideration of different objectives [33]. A multi-objective harmony search algorithm is proposed to minimize fuel cost [34]. A highly constrained multi-objective OPF involving conflicting objectives is solved using a comprehensive learning particle swarm optimization (CLPSO) algorithm [35]. A modified flower pollination algorithm (MFPA) is implemented to calculate the PFs under different objective [36]. Multi-objective optimal power flow using differential evolution-based approach is presented in [37]. A novel differential evolution (MDE) solution methodology is investigated for multi-objective optimal power flow (MOPF) problem [38]. An enhanced differential evolution with self-adaptive strategy and mixed crossover operator is considered for MOOPF problem [39]. A multi-objective differential evolution algorithm (MODEA) based on forced initialization is suggested [40]. Imperialist competitive algorithm with some modified methods (MICA) is used to solve the MOPF problem using a Pareto-based approach [41].
In this paper, the analysis of power flow is established, and then, the study of the optimal power flow problem (OPF) is performed to optimize a particular objective functions while satisfying certain specified constraints (equality and inequality constraints). We emphasize on the development of optimal power flow technique using a multi-objective backtracking search algorithm (MOBSA). This latter is a methodology that seeks to find the solution of a group of objective functions. There are several objectives which must be optimized simultaneously, and they are different, i.e. when the first function diminished, the second increased and vice versa. Then, we should reach a compromise solution between two or more objectives. Backtracking search algorithm (BSA) is a stochastic optimization algorithm inspired from nature by Pinar Civicioglu [42]. Since it has been introduced, various researchers have tried to use the standard BSA due to its powerful global exploration, local exploitation, and high convergence speed. Other academics suggested new algorithms based on the original BSA in order to optimize its performance and its adaptability to different optimization problems. Moreover, BSA and its variants have been widely used in the field of engineering. It has been successfully performed in solving various real-world applications as follows: in material engineering, Ref [43] Chatzipavlis et all. proposed an approach called BSA-based neuro-fuzzy network, where the neuro-fuzzy network is used in the standard BSA for modelling the beach realignment, and to improve the performance of BSA, the authors modified its mutation and crossover in order to maintain a balance between exploration and exploitation. Control engineering: in [44], the authors suggested a shuffled BSA to identify the parameters of chaotic systems. In this novel method, two concepts were defined: firstly a new operator to initialize the trial population and secondly the population is separated to a several bunch. Afterwards, each group is developed by itself based on BSA process. After a repeated execution, a better search space exploration is provided and an independent search rises the exploitation capability of BSA. According to the recent study [45], an optimization of the output weights of deep stochastic configuration networks (DSCN) to construct optimal prediction intervals (PIs) is treated. Based on this, BSA was modified by proposing a dynamic updating strategy for the control factor (F), and a new adaptive mutation process to enhance its convergence. In addition, owing to the high number of variables to be optimized, a levy flight is adopted to produce another trial population to improve the diversity of a population. Mechanical engineering: in this study [46], a nonlinear active noise control system (ANC) is solved by a hybrid BSA with sequential quadratic programming SQP. This last was utilized with the BSA algorithm to enhance the search capabilities of BSA. In another study [47], a diagnosed gear fault is exploited using a support vector machine (SVM) optimization based on BSA (BSA-SVM). The efficiency of SVM is influenced by its optimal parameters. On this basis, BSA is included to make the optimization for the SVM parameters. Electrical engineering: as stated in [48], the maximum power point tracking (MPPT) is combined with BSA to analyse the I-V and P-V characteristics of different solar PV array configurations. The research in [49] introduced a binary backtracking search algorithm (BBSA) to find the optimal scheduling controller of microgrids virtual power plant. Referring to [50], the ORPD problem was solved by minimizing power losses, and improving the voltage profile using the BSA optimization. The authors of [51] applied backtracking search optimization algorithm (BSA) to perform the OPF calculation with non-smooth cost functions. Reference [52] solves multi-type distributed generators along distribution networks problems using a multi-objective BSA algorithm based on a weighting factor approach. Information and communication technology: as proposed in [53], a hybrid backtracking search with hyper-heuristic was utilized for minimizing the flexible job shop-scheduling problem (FJSPF) with fuzzy processing time. In BS-HH, BSA is used as the high-level strategy to find the optimal performing heuristics that generates near-optimal solutions for the FJSPF by using an efficient low-level heuristics. As articulated in [54], BSA was introduced to a dynamic QoS for maximizing the composite service quality in IoT application layer, to make a balance between the performance and computational time. All the experiment results of those previous optimization problems revealed an improved and robust performance of BSA approach. The remaining paper is organized in four sections as follows: Sect. 2 introduces mathematical model of multi-objective optimal power flow. Section 3 is focused on the explanation of the proposed multi-objective backtracking search algorithm method. The simulation results and discussion of MOBSA are demonstrated in the last section, and then, the paper will be finished by giving a short conclusion.
2 Multi-objective optimal power flow study
In general, the goal of a multi-objective optimal power flow (MOOPF) problem is to optimize two or more selected objective functions through optimal power system control parameters, while satisfying several equality and inequality constraints, simultaneously. It can be mathematically formulated as follows:
where f(x, u) is the objective function to be optimized, g(x, u) is the equality constraints, h(x, u) is the inequality constraints, x is the vector of dependent variables (state variables), and u is the vector of independent variables (control variables).
2.1 State variables
The state variables x can be expressed as:
where \(P_{g1}\) is the generator active power output at slack bus, \(V_L\) is the load bus voltage magnitude at PQ buses, \(Q_g\) is the generator reactive power output of all generator units, and \(S_l\) is the transmission line loading (or line flow). \(N_{pq}\), \(N_g\) and \(N_l\) denote the number of load buses, number of generating units, and number of transmission lines, respectively.
2.2 Control variables
The control variables u can be expressed as:
where \(P_g\) is the active power generation at the PV buses except at the slack bus, \(V_g\) is the generation bus voltages magnitude at PV buses, T is the transformer tap settings, \(Q_c\) is the shunt VAR compensation, \(N_g\), \(N_c\) and \(N_T\) are the number of generators, number of regulating transformers, and number of VAR (shunt) compensators, respectively.
2.3 Objective constraints
The optimal power flow problem has both equality and inequality constraints.
2.3.1 Equality constraints
The equality constraints are represented by the power balance equations defined as follows:
where \(N_b\) is the number of buses, \(P_g\) is the active power generation, \(Q_g\) is the reactive power generation, \(P_d\) is the active load demand, \(Q_d\) is the reactive load demand, \(G_{ij}\) and \(B_{ij}\) are the elements of the admittance matrix \(Y_{ij}=G_{ij}+jB_{ij}\) representing the conductance and susceptance between bus i and bus j, respectively, \(\theta _{ij}=\theta _i - \theta _j\) is the difference in voltage angles between bus i and bus j.
2.3.2 Inequality constraints
The inequality constraints are the operating limits of the equipment present in the power system, and they are presented as:
-
Generator constraints:
where \(V_i^{min}\) and \(V_i^{max}\) are, respectively, the minimum and maximum limits of the \(i^{th}\) bus voltage of power plant \(V_i\). \(P_{gi}^{min}\) and \(P_{gi}^{max}\) are the maximum and minimum active power limit of the \(i^{th}\) generator. \(Q_{gi}^{min}\) and \(Q_{gi}^{max}\) represent the minimum and maximum reactive power limit of the \(i^{th}\) traditional generator, respectively. Ng is the number of generation.
-
Transformer constraints:
where \(T_i^{min}\) and \(T_i^{max}\) represent the minimum and maximum limit of the \(i^{th}\) tap changer transformer \(T_i\), respectively. \(N_T\) is the number of tap changers.
-
Shunt VAR compensators constraints:
where \(Q_{c,i}^{min}\) and \(Q_{c,i}^{max}\) are the minimum and maximum limit of the \(i^{th}\) shunt compensator \(Q_{c,i}\). Nc is the number of capacitor components connected to the power system.
-
Security constraints:
where \(S_{li}\) and \(S_{li}^{max}\) is the maximum limit of MVA of the \(i^{th}\) transmission line. Nl is the number of transmission lines of the power system.
2.4 Objective functions
Optimizing the fuel cost is frequently the most common objective function considered in the optimal power flow problem, and it is conventionally modelled by a quadratic equation. In addition, other important objectives are provided herein as power losses and voltage deviation.
2.4.1 Minimization of Total Fuel Cost
The fuel cost for each power plant can be expressed as follows [37]:
where Ng is the number of generation. \(a_i\), \(b_i\), \(c_i\), \(d_i\), and \(e_i\) are the cost coefficients of generating unit i.
2.4.2 Active power losses (Ploss)
The power loss is one of the important objectives of the OPF problem, and it is expressed as [37]:
where \(P_{loss}\) is the total active power losses of the transmission network. \(G_i\) is the transfer conductance.
2.4.3 Voltage deviation (VD)
Voltage deviation is a measure of voltage quality in the network. The bus voltage is considered as one of the most important security and service indexes. The aim of this objective function is to minimize all PQ bus voltage deviations from 1.0 p.u. Mathematically, it is expressed as [30]:
where VD is the total voltage magnitude deviation of the power system.
3 Multi-objective backtracking search algorithm
BSA is a population-based iterative evolutionary algorithm designed to be a global minimizer. This method is effective and capable of solving different numerical optimization problem (nonlinear, non-convex, and complex). Its structure is simple, and it needs just one control parameter unlike a lot of other search algorithms. BSA can be divided into five evolutionary mechanisms (Initialization, Selection I, Mutation, Crossover, and Selection II), and BSA’s algorithm is summarized in Fig. 1.

Flow chart of the BSA algorithm
3.1 Backtracking Search Algorithm
The five major steps of BSA are described briefly herein:
Step 1: Initialization
The BSA method starts by initializing randomly two populations in the search space, named Pop and histPop, Eq. (15) and (16).
where Pop and histPop are the current and historical populations, respectively. \(i=1,\ldots ,N\) and \(j=1,\ldots ,D\) are the population size and dimension of the problem, respectively. rand is a uniform distribution between 0 and 1. The algorithm of this step is shown in Algorithm 1.

Step 2: Selection I
histPop is generated at the beginning of each iteration following the rule of \((if-then)\) according to Eq. (17):
After determining the histPop, a permuting function (random shuffling function) is used to change randomly the order of the individuals in histPop using Eq. (18).
Step 3: Mutation
Mutation operator initializes the form of trial population according to the following equation:
where F is a parameter controlling the amplitude of the search direction matrix computed as the difference between the historical and the current populations matrix (histPop - Pop).
Step 4: Crossover
The final form of the trial population is determined in BSA’s crossover. This process uses two steps: The first determines the number of elements of each individual by a control parameter named mixrate. The second generates a random binary matrix map with a same size of Pop Algorithm 2.

The parameter mixrate controls the maximum number of elements in each row of matrix map with the value of 1.
-
Boundary Control Mechanism of BSA:
After the crossover, some individuals might violate the boundaries of the optimization variables, so they need to be checked and modified by an appropriate mechanism Algorithm 3.

Step 5: Selection II
In this stage, BSA compares each individual of V with its homologue from Pop in order to determine the next population Pop.
3.2 Proposed MOBSA non-dominated approach
The important phases in MOBSA are the two main steps, mutation and crossover mentioned previously.
As mentioned before, in each generation of the evolution process, BSA deals with the population Pop. The offspring population V is produced by the phase’s mutation and crossover. And in the Selection II, the individuals of Pop and of V are compared. For improving BSA to multi-objective optimization application, the comparison needs to be modified according to the concept of Pareto dominance. When the individual Pop is compared with the individual V, three situations are occurred, in which the first V is selected as the individual of the next population, but the second and the third situations Pop are selected:
-
Pop is dominated by V if \(V \prec Pop\).
-
Pop dominates V if \(Pop \prec V\).
-
Neither Pop is dominated by V, nor Pop dominates V if \(V \prec Pop\) and \(Pop \prec V\).
3.2.1 Phases of multi-objective BSA
The steps of MOBSA are described as follows:
Step 1: Initialize two populations in the search space \(\Omega \) (Pop and histPop) using Eqs. (15) and (16), and set the iteration number \(i = 0\).
Step 2: Evaluate the fitness function of each individual of Pop and save the non-dominated solutions from among the population members into the non-dominated sorting.
Step 3: redefine the histPop and modify it through Eqs. (17) and (18).
Step 4: the trial population M is generated by applying the mutation operator through Eq. (19).
Step 5: determine the final trial population V by the crossover step through Eq. (20). Then verify and modify the constraints.
Step 6: determine the next population Pop by comparing each individual of V with its homologue from Pop using Eq. (21).
Step 7: set \(i = i+1\) and then verify the stopping criteria, if algorithm needs to be repeated, return to Step 3.

Crowding distance calculation of the density estimation

Membership functions for objective function

Single line diagram of IEEE 30-bus test system
3.2.2 Crowding distance
A specific crowding distance strategy is employed to define an ordering among individuals. The crowding distance value of a particular solution is the average distance of its two neighbouring solutions. The quantity \(D_{p}\) serves as an estimate of the diagonal of the cuboid formed by using the nearest neighbours as the vertices. To compute the crowding distance, we need to sort the population according to each objective function value in ascending order. Thereafter, for each objective function, the boundary solutions are assigned an infinite distance value. All other intermediate solutions are assigned a distance value equal to the corresponding diagonal length.
The crowding distance of the \(i^{th}\) solution in its front as the diagonal length of the cuboid is shown in Fig. 2.
3.2.3 The best compromise solution
The fuzzy logic term was first introduced and described using membership functions by L.A. Zadeh in 1965 [55]. It was elaborated to define the distinctions among data which is neither true nor false, which means that fuzzy logic aids to deal with the uncertainty of any situation and decide whether the statement is true or false. The only condition a membership function must really satisfy is that it must vary between 0 and 1. The fuzzy has been applied to various fields, from control theory to AI.
In this paper, once getting the non-dominated Pareto optimal set using the MOBSA approach, we may need to extract one optimal among the Pareto optimal solutions, which is called the best compromise solution, for satisfying the different goals to some extent. However, owing to the uncertainty of the decision maker’s judgement in multi-objective optimization problems, a fuzzy decision-making strategy is integrated to tune this issue. For this purpose, each objective function \(f_i\) is mapped to [0,1] by linear membership function. Then, the fuzzy membership function for \(i^{th}\) objective function can be calculated as follows:
where i is the index of objective functions, \(\mu _{fi}\) represents the membership function of \(i^{th}\) objective, \(f_i\) is the fitness value of \(i^{th}\) objective function, \(f_i^{min}\) and \(f_i^{max}\) are the minimum and maximum fitness value of \(i^{th}\) objective function among all the non-dominated solutions.
Therefore, the membership function represents the degree of membership in fuzzy sets using values between 0 and 1. The value 0 indicates incompatibility with the sets, while 1 means full compatibility Fig. 3. For each Pareto solution k, the normalized membership function is defined as:
where D is the number of non-dominated solutions, and m is the number of objective functions.
Now, the best compromise solution is the one that has the maximum value of minimum membership number \(\mu ^k\), and it can be selected using the min-max method following the fuzzy decision process in [56] as follows:
4 Simulation results and discussion
5 Results analysis
To improve the effectiveness of the proposed algorithm for solving optimal power flow (OPF) problem, we applied it to a three power systems, IEEE 30-bus in Fig. 4, IEEE 57-bus, and IEEE 118-bus test systems. Table 1 summarizes the characteristics details of these various systems. We considered eight different cases with different complexity illustrated by the cases reported in Table 2. The dimension (control variables) of OPF problem is 24, 33, and 130 for IEEE 30-bus, 57-bus, and 118-bus systems, respectively. The population size and maximum number of function evaluation are varied depending on the different cases. The cost coefficients of the three systems are included in Table 3. The results obtained by the proposed approach are compared with the results found by other heuristic methods as illustrated in the next subsection. The optimal settings of control variables found are shown in Tables 4, 6, 7, 8, 10, 12, 14, and 15.
The proposed MOPF optimization problem was solved using a computer with Intel Core i5 CPU @2.7 GHz and 4GB RAM. The simulation results were implemented in MATLAB R2016b software.
5.1 IEEE 30-bus power system
The IEEE 30-bus test system consists of 6 generators in which bus 1 is chosen as the slack bus, 24 load buses, 41 branches, 4 transformers, and 9 shunt reactive power injections as illustrated in Table 1. The optimization problem has 24 control variables, where its boundaries are taken between [0.95–1.1] for voltage magnitude, [0.9–1.1] for transformer taps, and [0–5] for VAR compensators. The detailed data (line and bus data) for the considered IEEE 30-bus system are given in [57]. The system active and reactive power demands are 283.4 (MW) and 126.2 (MVAR), respectively.
5.1.1 Case 1: fuel cost and power losses
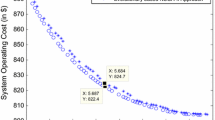
For this case, the optimization of fuel cost and power losses is considered simultaneously as the multi-objective function of the OPF. The simulation was run using the proposed algorithm with NP = 100 and a maximum of 200 iterations. Figure 5 shows the Pareto front (non-dominated solution) for this case. The results obtained are presented in Table 4. The minimum fuel cost, minimum active loss, and the best compromise solutions obtained were 799.046 ($/h) and 2.8841 (MW), and (843.468 ($/h), 4.6336 (MW)), respectively. Table 5 provides the comparison between the results attained with other methods reported in the literature as MOABC/D, NSMOGSA, and NSGA-II.
5.1.2 Case 2: fuel cost, voltage deviation
In Case 2, minimization of fuel cost and voltage deviation is simultaneously considered. Simulation was run with NP = 100 and a maximum of 200 iterations. The simulation results of this case are shown in Table 6, and its Pareto front is illustrated in Fig. 6. The minimization result fuel cost and voltage values in this case are 799.298 ($/h) and 0.128 (p.u.), respectively. The BCS are 799.6455 ($/h) and 0.4182 (p.u.). Comparison analysis with other algorithms was also performed, and its results are illustrated in Table 6.

Pareto fronts case 1
5.1.3 Case 3: fuel cost, power losses, and voltage deviation
This case shows the minimization of all objective functions (fuel cost, power losses, and voltage deviation) simultaneously. The proposed MOBSA gives best cost, best active losses, and best voltage deviation of 799.271 ($/h), 2.8589 (MW), and 0.0959 p.u. as given in Table 7, respectively. Figure 7 displays the Pareto front for this case, and Table 7 tabulates the comparison between the proposed method and others.
5.2 IEEE 57-bus power system
This test system has 7 generators (slack generator is at bus 1), 50 load buses, and 80 branches where 17 line OLTCs are existed, 15 transformers, 3 shunt reactive power injections, six generators real powers, and 7 generators voltages. This system has totally 33 control variables for OPF problem. The voltage magnitude limits are between 0.95 and 1.1 p.u. The lower and upper limits of transformer taps are 0.9 and 1.1 p.u., respectively. The limits of VAR compensators are varying between 0 to 20. Line and bus data are provided in [58]. Active and reactive power demands are 1250.8 (MW) and 336.4 (MVAr), respectively.
5.2.1 Case 4: fuel cost and power losses
The minimum fuel cost and losses values obtained in this case are 41623.292 ($/h) and 8.5788 (MW), respectively. And the BCS are 41959.152 ($/h) and 9.7667 (MW), its optimal control variables are tabulated in Table 8, and the Pareto front is shown in Fig. 8. This result is obtained for 200 generations, 400 iterations, and is compared with other methods as shown in Table 9.
5.2.2 Case 5: fuel cost and voltage deviation
The minimization of two objectives such as fuel cost and voltage deviation is considered simultaneously to solve the MOOPF problem. The non-dominated solutions obtained are given in Fig. 9. It is observed from Table 10 that the best compromise solution (BCS) attained is 41721.309 ($/h) and 0.6462 (p.u.), and the minimum of fuel cost and voltage is 41655.984 ($/h) and 0.6052 (p.u.), respectively. This case is compared with QOTLBO. The comparison of this case is illustrated in Table 11.
5.2.3 Case 6: fuel cost, power losses, and voltage deviation
All objective functions (fuel cost, power losses, voltage deviation) are taken into consideration simultaneously for optimization. The best non-domination combination of three objectives is 42338.39 ($/h), 12.1451 (MW), and 0.8059 (p.u.), respectively, and the minimum of each objectives is 41628.522 ($/h), 9.2175 (MW), and 0.6449 p.u.), as given in Table 12. Pareto front is shown in Fig. 10. The results are assessed to MODE, SPEA, and MALO as shown in Table 13.
5.3 IEEE 118-bus power system
The IEEE 118-bus test system has 118 buses, 54 generators (slack generator is at bus 69), 186 branches, 14 shunt elements, 9 transformers tap, and 130 control variables. Voltage, transformers tap, and shunt capacitors limits are considered in the range of [0.95–1.1]p.u., [0.9–1.1]p.u., and [0–25]p.u., respectively. The active and reactive power demands are 4242 MW and 1439 MVAr, respectively. Bus and line data can be found in [58].

Pareto fronts case 2

Pareto fronts case 3
5.3.1 Case 7: fuel cost and power losses
The optimization in this case takes into account two objectives fuel cost, and real power. Table 14 tabulates the results, the values of minimization objectives are 135,620.99 ($/h) and 23.15116 (MW), and the compromise solution is 138,669.21 ($/h) and 37.79042 (MW), respectively. Figure 11 shows the Pareto front.

Pareto fronts case 4
5.3.2 Case 8: fuel cost and voltage deviation
In Case 8, fuel costs minimization and voltage deviation are taken into consideration. The simulation results of this case are shown in Table 15, and its non-dominated solutions obtained are illustrated in Fig. 12. The proposed MOBSA gives minimum cost and voltages deviation of 135839.01 ($/h) and 0.223 (p.u.), respectively. The BCSs are 136353.82 (MW), and 0.2787 (p.u.).

Pareto fronts case 5
6 Discussion
This section visualizes the performance and efficacy of the proposed algorithm MOBSA in solving multi-objective optimal power flow problem. As we discuss before, standard BSA and its variants have been successfully evaluated in solving real-world problem. Similarly, in the current paper, the multi-objective BSA was performed in all cases. To better handle such multi-objective problem, two main challenging goals are required: accurate convergence towards the global optimum and high coverage (uniform distribution optimal front). More precisely, an effective algorithm should balance between convergence and coverage.
For results assessment, three most well-regarded algorithms are designated and re-implemented such as MALO, MODE, and SPEA-II. It is worth noticing that according to no free lunch theorem (NFL) [61] (Wolpert-Macready,1997), none of the meta-heuristics algorithms can be talented to resolve all optimization problems, and that is the main reason that some algorithms outperform others in addition to coverage and convergence.
It is worth discussing here that due to the dual populations, MOBSA can ensure different search directions, which leads to higher diversification in search space during optimization. Additionally, MOBSA highly boosts exploitation using the F parameter. Referring to the results found, it is clearly seen that MOBSA was able to provide better solution than other approaches in terms of distribution and solutions quality. It might be seen from case 1 in Fig. 5 that the Pareto optimal front of all algorithms is slightly similar except MALO.
Inspecting Pareto optimal fronts obtained for other cases, it is illustrated that MOBSA keeps a well-distributed and a good convergence characteristics, while the other multi-objective algorithms tend to converge to a local optimum, on account of the poor convergence to the Pareto optimal solutions. In particular, the MALO algorithm is not able to show good solutions in terms of convergence and coverage. However, when solving more complex problems, this algorithm can be easily stuck into local optima. Furthermore, additional important aspect of multi-objective optimization algorithms is the running time for achieving accurate optimal solutions. As illustrated in Table 16, it is clearly observed that the execution time of MOBSA is less than other algorithms.

Pareto fronts case 6
To sum up, these results highly demonstrate that the algorithm suggested in this work MOBSA can find an approximate Pareto optimal solutions with high convergence and coverage along both objectives when solving complex problems in large scale.
7 Conclusion
The present paper proposes a novel evolutionary algorithm named MOBSA for solving multi-objective problems and finding Pareto optimal solutions. This algorithm was applied for different systems of transmission power systems, as IEEE 30-bus, IEEE 57-bus, and IEEE 118-bus systems, to minimize fuel cost, active power losses, and voltage deviation as objective functions. The obtained non-dominated solutions of MOBSA are compared with several multi-objective methods reported in the recent literature. Moreover, a fuzzy-based mechanism is employed to extract the best compromise solution. As the simulation results indicated, the multi-objective backtracking search algorithm is an efficient and a potential approach, and is successful in solving multi-objective optimal power flow compared with other methods like MODE, SPEA, MALO, MOABC/D, NSGA-II, and QOTLBO. To conclude, MOBSA is a robust and reliable optimization approach for solution of a large-scale multi-objective optimal power flow issue.

Pareto front case 7

Pareto front case 8
Abbreviations
- \(a_i\), \(b_i\), \(c_i\) :
-
Cost coefficients of the \(i^{th}\) generator
- BCS :
-
Best compromise solution
- \(B_{ij}\) :
-
Susceptance of the admittance matrix
- D :
-
Dimension
- f(x, u):
-
Objective function
- F :
-
Scale factor
- \(F_C\) :
-
Fuel cost
- \(G_{ij}\) :
-
Conductance of the admittance matrix
- g(x, u):
-
Equality constraints
- histPop :
-
Historical population
- h(x, u):
-
Inequality constraints
- low :
-
Lower limits of problem
- N :
-
Population size (the number of individuals)
- OPF :
-
Optimal power flow
- \(P_{gi}\), \(P_{di}\) :
-
Active and reactive power generated at \(i^{th}\) unit
- \(P_{loss}\) :
-
Power losses
- Pop :
-
Population
- \(Q_C\) :
-
Shunt VAR compensation
- \(Q_{gi}\), \(Q_{di}\) :
-
Active and reactive power generated at \(i^{th}\) unit
- \(S_{li}\) :
-
Apparent power flow of \(i^{th}\) line
- \(T_i\) :
-
Tap settings of regulating transformer i
- \(T_{i,j}\) :
-
Trial population
- u :
-
Vector of independent variables or control variables
- up :
-
Upper limits of problem
- VD :
-
Voltage deviation
- \(V_{gi}\) :
-
Voltage magnitudes at \(i^{th}\) PV buses
- \(V_{li}\) :
-
Voltage magnitude at load bus i
- x :
-
Vector of dependent variables or state variables
- \(\mu _{fi}\) :
-
Membership function of \(i^{th}\) objective
- \(\theta _i\) :
-
Voltage angles at \(i^{th}\) bus
- BSA:
-
Backtracking search algorithm
- MALO:
-
Multi-objective ant lion optimization
- MDE:
-
Multi-objective differential evolution
- MICA3:
-
Modified imperialist competitive algorithm
- MOABC/D:
-
Multi-objective artificial bee colony algorithm based on decomposition
- MODE:
-
Multi-objective differential evolution
- MOO:
-
Multi-objective optimization
- NSMOGSA:
-
Non-dominated sorting multi-objective gravitational search algorithm
- NSGA II:
-
Non-dominated sorting genetic algorithm
- SPEA:
-
Strength Pareto evolution algorithm
- QOTLBO:
-
Quasi-oppositional teaching learning-based optimization
References
Dommel HW, Tinney WF (1968) Optimal power flow solutions. IEEE Trans Power Syst 87(10):1866–1876
Syai’in M, Soeprijanto A (2012) Improved algorithm of Newton Raphson power flow using GCC limit based on neural network. Int J Electr Comput Sci 12(1):7–12
Al Ameri A, Nichita C, Dakyo B (2014) An efficient algorithm for power load flow solutions by schur complement and threshold technique. Int J Adv Res Electr Electrical Inst Eng 3(8):11062–11069
Singhal K (2014) Comparison between load flow analysis methods in power system using MATLAB. Int J Sci Eng Res 5(5):1412–1419
Habibollahzadeh H, Luo GX, Semlyen (1989) A Hydrothermal optimal power flow based on a combined linear and nonlinear programming methodology. IEEE Trans Power Syst 4(2):530–537
Aoki K, Nishikori A, Yokoyama RT (1987) Constrained load flow using recursive quadratic programming. IEEE Trans Power Syst 2(1):8–16
Momoh JA, Zhu JZ (1999) Improved interior point method for OPF problems. IEEE Trans Power Syst 14(3):1114–1120
Salgado RS, Schiochet AF, Barboza LV (2010) Multi-objective optimal power flow solutions through a parameterized model. In: Eighth world energy system conference, Valahia, Romania
Hayyolalam V, Pourhaji Kazem AA (2020) Black Widow Optimization Algorithm: a novel meta-heuristic approach for solving engineering optimization problems. Eng Appl Artif Intell 87:103249
Mirjalili S, Gandomi AH, Mirjalili SZ, Saremi S, Faris H, Mirjalili SM (2017) Salp Swarm algorithm: a bio-inspired optimizer for engineering design problems. Adv Eng Softw 114:163–191
Kamboj VK, Nandi Y, Bhadoria A, Sehgal S (2020) An intensify Harris hawks optimizer for numerical and engineering optimization problems. Appl Soft Comput 89:106018
Dhawale D, Kamboj VK (2020) hHHO–IGWO: A new Hybrid Harris Hawks optimizer for solving global optimization problems. International Conference on Computation, Automation and Knowledge Management (ICCAKM) 19495342
Hashim FA, Houssein EH, Mabrouk MS, Al-Atabany W, Mirjalili S (2019) Henry gas solubility optimization: A novel physics-based algorithm. Future Gener Comput Syst 101:646–667
Bhadoria A, Kamboj VK (2018) Optimal generation scheduling and dispatch of thermal generating units considering impact of wind penetration using hGWO-RES algorithm. Appl Intell 49(4):1517–1547
Weiguo Z, Zhang Z, Wang L (2020) Manta ray foraging optimization: an effective bio-inspired optimizer for engineering applications. Eng Appl Artif Intell 87:103300
Abou El Ela AA, Abido MA, Spea SR (2011) Differential evolution algorithm for optimal reactive power dispatch. Electr Power Syst Res 81(2):458–464
Suresh V, Sreejith S, Sudabattula SK, Kamboj VK (2019) Demand response-integrated economic dispatch incorporatingrenewable energy sources using ameliorated dragonfly algorithm. Electr Eng 101(2):421–442
Abuella M, Hatziadoniu J (2016) Selection of most effective control variables for solving optimal power flow using sensitivity analysis in particle swarm algorithm. arXiv:1601.04150
Allaoua B, Laouafi A (2008) Collective intelligence for optimal power flow solution using ant colony optimization. Electr J Pract Tech 7(13):88–105
Wankhade CM, Vaidya AP (2012) Optimal power flow evaluation of power system using genetic algorithm. Int J Power Syst Oper Energy Manag 1(4):2231–4407
Ara AL, Kazemi A, Behshad M (2013) Improving power systems operation through multi-objective optimal location of optimal unied power ow controller. Turk J Electr Eng Comput Sci 21:1893–1908
Narimani MR, Azizipanah-Abarghooee R, Zoghdar-Moghadam-Shahrekohne B, Gholami K (2013) A novel approach to multi-objective optimal power flow by a new hybrid optimization algorithm considering generator constraints and multi-fuel type. Energy 49(1):119–136
Sulaiman MH, Mustaffa Z, Mohamed MR, Aliman O (2015) Using the gray wolf optimizer for solving optimal reactive power dispatch problem. Appl Soft Comput 32:286–292
Attia AF, El Sehiemy RA, Hasanien HM (2018) Optimal power flow solution in power systems using a novel Sine-Cosine algorithm. Int J Electr Power Energy Syst 99:331–343
Ghaemi S, Aghdam FH, Safari A, Farrokhifar M (2019) Stochastic economic analysis of FACTS devices on contingent transmission networks using hybrid biogeography-based optimization. Electr Eng 101:829–843
Khorsandi A, Hosseinian SH, Ghazanfari A (2013) Modified artificial bee colony algorithm based on fuzzy multi-objective technique for optimal power flow problem. Electr Power Syst Res 95:206–213
Shang R, Wang J, Jiao L, Wang Y (2014) An improved decomposition-based memetic algorithm for multi-objective capacitated arc routing problem. Appl Soft Comput 19:343–361
Liang RH, Wu CY, Chen YT, Tseng WT (2015) Multi-objective dynamic optimal power flow using improved artificial bee colony algorithm based on Pareto optimization. Int Trans Electr Energy Syst 26(4):692–712
Medina AM, Das S, Carlos ACC, Ramirez MJ (2014) Decomposition-based modern metaheuristic algorithms for multi-objective optimal power flow a comparative study. Eng Appl Artif Intel 32:10–20
Ghasemi M, Ghavidel S, Ghanbarian MM, Gitizadeh M (2015) Multi-objective optimal electric power planning in the power system using Gaussian bare-bones imperialist competitive algorithm. Inf Sci 294:286–304
Yuan X, Zhang B, Wang P, Ji L, Yuan Y, Huang Y, Lei X (2017) Multi-objective optimal power flow based on improved strength Pareto evolutionary algorithm. Energy 122:70–82
Warida W, Hizama H, Mariuna N, Wahaba NIA (2018) A novel quasi-oppositional modified Jaya algorithm for multi-objective optimal power flow solution. Appl Soft Comput 65:360–373
Zhanga J, Tang Q, Li P, Deng D, Chen Y (2016) A modified MOEA/D approach to the solution of multi-objective optimal power flow problem. Appl Soft Comput 47:494–514
Sivasubramani S, Swarup K (2011) Multi-objective harmony search algorithm for optimal power flow problem. Int J Electr Power Energy Syst 33:745–752
Rahmati M, Effatnejad R, Safari A (2014) Comprehensive Learning Particle Swarm Optimization (CLPSO) for Multi-objective Optimal Power Flow. Indian J Sci Tech 7(3):262–270
Barocio E, Regalado J, Cuevas E, Uribe F, Zúñga P, Torres PJR (2017) Modified bio-inspired optimisation algorithm with a centroid decision making approach for solving a multi-objective optimal power flow problem. IET Gener Trans Distri 11(4):1012–1022
Abido MA, Al-Ali NA (2012) Multi-Objective Optimal Power Flow Using Differential Evolution. Arab J Sci Eng 37:991–1005
Shaheen AM, Farrag SM, El-Sehiemy RA (2017) A Novel Multi-Objective Optimal Power Flow Solution Methodology. IET Proceedings Gener Trans Distrib 11(2):570–581
Pulluri H, Naresh R, Sharma V (2017) An Enhanced Self-adaptive Differential Evolution Based Solution Methodology for Multiobjective Optimal Power Flow. Appl Soft Comput 54:229–245
Shaheen AM, El-Sehiemy RA, Farrag SM (2015) Solving multi-objective optimal power flow problem via forced initialised differential evolution algorithm. IET Gener Trans Distrib 10(7):1634–1647
Ghasemi M, Ghavidel S, Ghanbarian MM, Massrur HR, Gharibzadeh M (2014) Application of imperialist competitive algorithm with its modified techniques for multi-objective optimal power flow problem: a comparative study. Inf Sci 281:225–247
Civicioglu P (2013) Backtracking search optimization algorithm for numerical optimization problems. Appl Math Comput 219(15):8121–8144
Chatzipavlis A, Tsekouras GE, Trygonis V, Velegrakis AF, Tsimikas J, Rigos A, Hasiotis T, Salmas C (2019) Modeling beach realignment using a neuro-fuzzy network optimized by a novel backtracking search algorithm. Neural Comput Appl 31:1747–1763
Ahandani MA, Ghiasi AR, Kharrati H (2018) Parameter identification of chaotic systems using a shuffled backtracking search optimization algorithm. Soft Comput 22:8317–8339
Lu J, Ding J (2019) Construction of prediction intervals for carbon residual of crude oil based on deep stochastic configuration networks. Inf Sci 486:119–132
Khan WU, Ye Z, Chaudhary NI, Raja MAZ (2018) Backtracking search integrated with sequential quadratic programming for nonlinear active noise control systems. Appl Soft Comput 73:666–683
Thai V, Cheng J, Nguyen V, Daothi P (2019) Optimizing SVM’s parameters based on backtracking search optimization algorithm for gear fault diagnosis. J Vibroeng 21(1):66–81
Sriram M, Ravindra K (2020) Backtracking Search Optimization Algorithm Based MPPT Technique for Solar PV System. in: Adv Decis Sci, Image Process, Secur Comput Vis, Springer 498–506
Abdolrasol MGM, Hannan MA, Mohamed A, Amiruldin UAU, Abidin IBZ, Uddin MN (2018) An optimal scheduling controller for virtual power plant and microgrid integration using the binary backtracking search algorithm. IEEE Trans Ind Appl 54:2834–2844
Shaheen AM, El-Sehiemy RA, Farrag SM (2016) Optimal reactive power dispatch using backtracking search algorithm. Aust J Electr Electron Eng 13:200–210
Chaib AE, Bouchekara H, Mehasni R, Abido MA (2016) Optimal power flow with emission and non-smooth cost functions using backtracking search optimization algorithm. Int J Electr Power Energy Syst 81:64–77
El-Fergany A (2016) Multi-objective allocation of multi-type distributed generators along distribution networks using backtracking search algorithm and fuzzy expert rules. Electric Power Compon Syst 44(3):252–267
Lin J (2019) Backtracking search based hyper-heuristic for the flexible job-shop scheduling problem with fuzzy processing time. Eng Appl Artif Intell 77:186–196
Badawy MM, Ali ZH, Ali HA (2019) QoS provisioning framework for service-oriented internet of things (IoT). Cluster Comput 1–17
Zadeh LA (1965) Fuzzy sets. Information and Control 8:338–353
Bellman R, Zadeh LA (1970) Decision-making in a fuzzy environment. Manage Sci 17:141–164
Alsac O, Stott B (1974) Optimal load flow with steady-state security. IEEE Trans Power Apparatus Syst 93(3):745–751
Zimmerman RD, Murillo-Sánchez CE, Thomas, RJ, Matpower Available at: http://www.pserc.cornell.edu/matpower
Bhowmik AR, Chakraborty AK (2014) Solution of optimal power flow using non-dominated sorting multi objective gravitational search algorithm. Int J Electr Power Energy Syst 62:323–334
Mandal B, Roy PK (2014) Multi-objective optimal power flow using quasi-oppositional teaching learning based optimization. Appl Soft Comput 21:590–606
Wolpert DH, Macready WG (1997) No free lunch theorems for optimization. Evol Comput IEEE Trans 1:67–82
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Daqaq, F., Ouassaid, M. & Ellaia, R. A new meta-heuristic programming for multi-objective optimal power flow. Electr Eng 103, 1217–1237 (2021). https://doi.org/10.1007/s00202-020-01173-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00202-020-01173-6