
Abstract
This paper addresses single and multiobjective topology optimization of truss-like structures using genetic algorithms (GA’s). In order to improve the performance of the GA’s (despite the presence of binary topology variables) a novel approach based on kinematic stability repair (KSR) is proposed. The methodology consists of two parts, namely the creation of a number of kinematically stable individuals in the initial population (IP) and a chromosome repair procedure. The proposed method is developed for both 2D and 3D structures and is shown to produce (in the single-objective case) results which are better than, or equal to, those found in the literature, while significantly increasing the rate of convergence of the algorithm. In the multiobjective case, the proposed modifications produce superior results compared to the unmodified GA. Finally the algorithm is successfully applied to a cantilevered 3D structure.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Optimization of discrete structures, such as trusses, grid shells and frames, is of great importance in structural engineering. While shape and sizing (Gil and Andreu 2001) optimization have received much attention and are relatively mature areas of research, several challenges still face researchers in the field of discrete topology optimization:
-
1.
The topology variables considered are discrete, meaning that traditional gradient-based optimization techniques are not directly applicable.
-
2.
In general multiple objectives may be of interest to the designer (Coello Coello et al. 2002). Multiobjective topology optimization increases the complexity of the problem.
-
3.
Optimization techniques developed to deal with discrete variable problems tend to have poor computational performance as pointed out by Ruiyi et al. (2009). Large scale structures, with a large number of variables, such as those typically encountered in civil engineering problems, further magnify this problem.
-
4.
Practical design and construction constraints further exacerbate the difficulties.
The presence of discrete or mixed variables in optimization problems has led to the successful development of optimization techniques such as stochastic search methods, of which genetic algorithms (GA) (Goldberg 1989; Hajela and Lee 1995; Ohsaki 1995; Kawamura et al. 2002) have become particularly popular. Population based stochastic methods, such as GA’s, are also well suited to multiobjective problems (Papadrakakis et al. 2002), since a number of individuals may be considered at any given time. This aspect is consistent with the notion of Pareto optimality in which a number of non-dominated (i.e. ‘best compromise’) solutions make up an optimal set (the Pareto optimal set). Much success has been achieved in the combination of multiobjective optimization with GA’s in other fields of structural optimization (Coello Coello 1999a). However, relatively few papers (Ruy et al. 2001; Mathakari et al. 2007; Balling et al. 2006; Su et al. 2011) on multiobjective topology optimization of truss structures are found in the literature.
The Multiobjective Genetic Algorithm used as a basis for the proposed method was introduced by Fonseca and Fleming (Fonseca et al. 1993). The use of a well established algorithm such as this allow for the effects of modifications to the algorithm to become clear. Nevertheless, in truss topology optimization, GA’s tend to have poor computational performance in terms of CPU time (Ruiyi et al. 2009).
One of the main focuses of current research is improving the cost and efficiency of the GA in discrete topology optimization by reducing the large number of unnecessary calculations. Two approaches exist in this context, namely avoiding duplicate calculations (Ruiyi et al. 2009) and avoiding calculation of non-feasible solutions (Kawamura et al. 2002; Deb and Gulati 2001; Hajela et al. 1993). The feasible solutions make up the feasible solution set Ω of the search space S which is defined by the constraints on the problem. Much research has been conducted on other issues relating to the constraints of the discrete topology optimization problem (Rozvany 1996; Rozvany 2001), but the kinematic stability of trusses has been largely overlooked. In discrete design problems, definition of Ω appears to have been almost completely neglected, particularly in engineering applications (Statnikov et al. 2009). Several constraints typically characterize Ω in structural topology optimization (although this list is by no means exhaustive):
-
1.
Stress constraints in the structure.
-
2.
Constraints on local stability of structural elements (such as buckling of elements).
-
3.
Constraints on the stiffness of the structure (or relating to the overall deflection of the structure).
-
4.
Constraints on the natural frequencies of the structure (Tong and Liu 2001).
-
5.
The condition of kinematic stability of the structure is particularly relevant to discrete topology optimization.
The kinematic stability of a discrete structure is intimately linked to the topology variables. While virtually all other constraints are present in sizing and shape optimization, the kinematic stability is exclusively of interest in topology optimization. In general, academic research focuses on very simple, small scale structures in which the problem of kinematic stability remains manageable. However, most civil engineering applications deal with large scale problems with numerous degrees of freedom. The smaller the relative size of the kinematically stable subset \(\Omega_{ks}\subseteq S\) with respect to S, the less likely the population is to contain a significant number of kinematically stable structures. Simply identifying unstable structures does not solve this problem.
The relative number of kinematically stable solutions evaluated by genetic algorithms have in the past been increased in three ways. Firstly stable solutions can be introduced as the seed for the initial population. Hajela and Lee (1995) propose a strategy composed of two successive optimization procedures, first generating a population of kinematically stable structures, ignoring structural response constraints. These least weight stable topologies form the basis for a topology optimization and member resizing optimization stage, where a lethalization technique is used to eliminate unstable topologies. The second method involves targeting the constraints of the solution by identifying unstable solutions directly. Approaches to dealing with constraints in evolutionary algorithms are summarized in Coello Coello (1999b). In most previous studies a check on the kinematic stability of the structure is performed, followed by penalization of the fitness of unstable structures (Ruiyi et al. 2009). Deb and Gulati (2001) suggest first penalizing individuals which do not satisfy the Chebyshev–Grübler–Kutzbach criterion,Footnote 1 then penalizing individuals with non-positive definite stiffness matrices.
Though these approaches seem to provide adequate results for small scale problems, they do not address the problem of scale inherent to the size of Ω ks . As the number of variables increases (for the same boundary conditions), the relative size of Ω ks decreases dramatically. For larger problems, penalization may not be effective at all. This problem has been demonstrated by Kawamura et al. (2002) who adopted a third approach whereby only stable topologies are produced by the GA using a novel genome coding method. However, this approach can limit the search space too much in large structures.
Based on these considerations the approach proposed in this paper, topology optimization with kinematic stability repair (or KSR), suggests two adaptations of the genetic algorithm specifically developed for truss topology optimization. Firstly, individuals with guaranteed kinematic stability are introduced into the initial population. Negligible computational effort is required for this initial step and a ‘good’ starting point for the algorithm is produced. Secondly, a chromosome repair operation is introduced which modifies a class of kinematically unstable structures produced by the other genetic operations. Chromosome repair in this context refers to mechanisms which alter the chromosome after cross-over and mutation in order to attempt to ensure the integrity of the structure. Repair algorithms have been used with success on problems with discrete design variables in other fields of optimization (Filomeno Coelho and Bouillard 2005), and in continuum multiobjective topology optimization with GA’s (Madeira et al. 2006). Some research has been conducted on the possibility of improving the performance of GA’s in truss topology optimization using a genotype refinement technique (Šešok and Belevicius 2008), however these studies focus on the stress constraint.
Starting from these considerations, the paper is organized as follows: after a description of the KSR approach (Section 2), a number of examples illustrate single-objective (Section 3) and multiobjective applications of the method (Section 4), followed by concluding remarks and future prospects (Section 5).
2 KSR approach
2.1 Parameterization of the structures
A fixed length vector (or chromosome) is used to represent the design variables (Fig. 1): separate binary topology variables are concatenated to sizing variables (where relevant) in the chromosome representation.

Typical parameter representation
The discrete topology variables are mapped to 2-tuples of positive integers representing the coordinate numbering of the end nodes of the bar elements. These tuples are in turn mapped to tuples of coordinates in Euclidean ℝ2 or ℝ3 space depending on the problem dimension. The ground structure allows for the first mapping, while the problem space (the nodal positions) allows for the second. The ground structure approach was chosen as it is the most common in the literature and allows us to more easily compare our results to the benchmark problems, taking only the effects of our modifications into account.
2.2 Hypotheses
The following hypotheses are assumed:
-
1.
The structures are made up of linear bar elements, subject only to axial forces.
-
2.
The elements and connections of the trusses are devoid of imperfections such as eccentricities.
-
3.
The materials under consideration are linear elastic.
-
4.
The connections between the bars are perfectly frictionless, pinned joints.
-
5.
The masses of the joints are neglected.
-
6.
Uncertainties (on the material properties, the loading, etc.) are not taken into account.
In future investigations several of these assumptions could be relaxed, however these are enforced here for simplicity.
2.3 Optimization framework
The KSR method employs a genetic algorithm optimization loop coupled to a finite element analysis which generates the necessary responses. For this investigation the finite element code FEAP (Taylor 2008) was used. The design domain comprises a set of nodes with fixed spatial coordinates, a set of supports and a set of loads. The ground structure defines the upper bound of the topological search space (Dorn et al. 1964). Introducing knowledge of the structures into the GA through a stable initial population and kinematic stability repair takes the conflicting nature of the objective functions in multiobjective optimization into account (see Section 2.3.2).
2.3.1 Initial population
In multiobjective structural optimization most studies available in the literature consider two conflicting objectives. Therefore, a strategy is proposed in which two additional procedures are used to generate the initial population for the GA search procedure. When the general effect of a particular type of configuration of elements on the objective functions is known, procedures may be devised which tend to generate these types of structures as members of the initial population. In this investigation, the procedures are intuitively developed, but a more rigorous approach is conceivable, (for example) through criterion selection. In the VEGA algorithm (Schaffer 1985) a criterion selection technique is used to create sub-populations corresponding to separate objectives performances. These populations are then combined to create the entire population (Fig. 2).

Analogy between VEGA (top) and KSR (bottom)
Two procedures are used in the multiobjective examples. The first produces individuals with large natural frequencies or greater stiffness (procedure 1); the second individuals with low masses (procedure 2). Procedure 1 uses a triangulation (for 2D problems) or tetrahedron (for 3D problems) meshing of a region of the space defined by the nodes. The loaded nodes and support nodes are given special precedence and loosely define the area to be meshed. In the 2D, case a triangle is generated for each support node or loaded node (Fig. 3). Thereafter, the gaps between these triangles are bridged by consecutive triangular structures. The procedure in the 3D case is equivalent, using tetrahedron (Fig. 4).

2D procedure 1

3D procedure 1
Procedure 2 employs a similar approach to that found in Kawamura et al. (2002). A stable triangular or tetrahedral kernel is produced randomly in the design domain. Thereafter, the structure is grown around this kernel by adding two (in the 2D case) respectively three elements (in the 3D case) attached to nodes already in the structure, sharing a common node. This process is continued, encouraging inclusion of nodes in the direction of unconnected loaded or supported nodes, until all of these nodes form part of the connected structure. Figure 5 illustrates this procedure for a very simple truss problem in two dimensions. The degree to which these two methods produce different results depends on the problem configuration (nodal positions, number of boundary constrained nodes, density of the ground structure, etc.). In addition to the kinematically stable individuals, a certain proportion of the initial population is randomly seeded to encourage diversity. In the VEGA approach the various subpopulations have the same size. Similarly, the kinematically stable sub-populations have roughly the same size.

2D procedure 2
In multiobjective optimization, a number of measures, called ‘metrics’, can be used to quantify the performance of a set of solutions. For example, the generational distance metric (I GD ) (see Zitzler et al. 2003 for details and other metrics) measures the normalized distance between two Pareto fronts. We use I GD here to evaluate the performance of Pareto fronts relative to the Pareto optimal solution. I GD = 0 signifies a convergence to the reference Pareto optimal solution. The results of a study of the size and composition of the initial population for the 54 bar example discussed in Section 4.2.2 can be seen in Figs. 6 and 7. Note that both the minimum number of function evaluations required, and the average accuracy of the calculations coincide with a stable initial population of 50–80%.

Average effect of composition of initial population on final solution for 54-bar multiobjective problem

Average effect of size of stable initial population on final solution for 54-bar multiobjective problem
2.3.2 Chromosome repair
The first requirement for the repair procedure is the identification of kinematic instability. Identification of unstable structures can be done in several of ways:
-
Checking the positive definiteness of the structure’s stiffness matrix K. If K is positive-definite, the truss is kinematically stable. This requires the assembly of the stiffness matrix and generally a numerical procedure to determine the condition of positive definiteness.
-
Checking for satisfaction of the Chebyshev–Grübler–Kutzbach criterion, a necessary, yet not sufficient criterion for the kinematic stability. Instabilities cannot be identified directly, since the position within the structure and the nature of the instability is unknown, making this check unsuitable for repair operations.
-
Checks on the connectivity of specific nodes. This can provide an indication of instabilities, yet is also a necessary but not sufficient set of criteria. Not all mechanisms can be identified in this way. A check of the positive-definiteness of K is still necessary.
-
The Singular Value Decomposition of the equilibrium matrix (Pellegrino 1993) provides detailed information about instabilities within the structure. This procedure can be computationally very expensive and does not necessarily indicate how a repair may take place.
The third approach is adopted here, since it provides specific structural information on how a repair to the structure can be carried out. The analysis of the stiffness matrix is carried out by default during the finite element analysis, and so a check on the instability of the structure is readily available in the event of instabilities which are not detected using the proposed approach.
Two types of checks are made and repairs carried out prior to the stiffness matrix assembly (Fig. 8). These checks identify several causes of kinematic instability and structurally undesirable configurations directly and allow for easy rectification of the detected problems:
-
1.
The connectivity check identifies the nodes which are insufficiently connected to the rest of the structure.Footnote 2 The following should be checked:
-
(a)
The connection of the loaded and support nodes. These nodes should be connected to the structure by at least one element.
-
(b)
Nodes connected to the structure by only one element (2D) or either one or two elements (3D). Isolated elements, connecting two nodes, but disconnected from the structure.
-
(a)
-
2.
In the 2D case the linear independence check identifies all nodes connected to two elements. If the three nodes concerned are not linearly independent, the common node is identified for repair. In the 3D case the planar check identifies nodes which are connected to three elements only. If the four nodes are planar, the common node is identified for repair.
The connectivity check (Fig. 9a)Footnote 3 examines the connectivity vector of tuples. If, for node i, (i = 1...n e ), 0 ≤ n i ≤ d a repair is carried out. Here n e is the total number of nodes and d is the number of dimension in the problem. The linear/planar independence check (Fig. 9b) analyses the connectivity of the structure and the geometric relationships between the nodes connected to common elements. Two types of operations are performed on the chromosomes in order to potentially move the structure into Ω ks :
-
1.
Addition of elements.
-
2.
Elimination of unnecessary elements.
Combinations of these operations are carried out until the structure is suitably stable from the point of view of this constraint check. The number of elements added or removed is chosen with a probability decided by the user.Footnote 4 The repair algorithm is shown in Fig. 10. Experience shows the type of kinematic instabilities identified by these checks are by far the most common, given the stable initial population generation and the use of crossover and mutation genetic operators preceding the repair operation. In fact, when repeating the trials carried out by Kawamura et al. (2002), we found (Fig. 11) that all instabilities (for this type of structure) could be repaired using the repair procedure described above. The repair algorithm, in a sense, decreases the size of the search space and therefore the size of the problem. The use of both addition and elimination of elements aids in preservation of diversity and preventing convergence towards a single solution (Coello Coello et al. 2002), sometimes called genetic drift (Cheng and Li 1997). Furthermore, local repair operations do not significantly alter the chromosomes of the individuals. Large scale repairing could negate the stochastic nature of the genetic algorithm through systematic repair of large swathes of the chromosome.

Modified genetic algorithm

Chromosome repair checks a and b

Repair procedure algorithm

Proportion of stable structures in the search space
3 Single-objective topology optimization
The KSR approach suggested in the preceding sections is implemented in a number of test problems. The methodology has been developed for multiobjective problems, however we use a number of well-known single-objective problems to test the efficacy of the proposed modifications to the GA.
3.1 Problem formulation
A review of the literature reveals the minimization of the mass of a structure (1) to be one of the most commonly studied objective functions. Four constraints are considered, namely the maximum stress in the elements (2), local stability of the individual elements (3), the maximum deflection of the structure (4) and kinematic stability. Since we cannot be certain that all possible types of instability can be detected and repaired structures still deemed to be kinematically unstable (after repair operations are carried out if any) are penalized, similarly to the method suggested in Deb and Gulati (2001). The problem is explicitly formulated as follows:
subject to:
-
1.
Stress constraints:Footnote 5
$$ \frac{t_{i}|\sigma_{i}|}{\sigma_{i}^{\max}}\leq1 $$(2) -
2.
Buckling constraints:
$$ \frac{t_{i}\sigma_{i}}{-\sigma_{i}^{cr}}\leq1 $$(3)where \(\sigma_{i}^{cr}=\frac{-\pi^{2}E_{i}I_{i}}{A_{i}l_{i}^{2}}\) and all cross-sections are circular.
-
3.
Vertical deflection constraint:
$$ \frac{\delta_{z}}{\delta_{z}^{\max}}\leq1 $$(4)where \(\delta_{z}=\max\left(\mathbf{d}_{z}\right)=\max\left(\left(\mathbf{K}^{-1}\mathbf{f}\right)_{z}\right)\)
where M is the number of bar elements, i = 1...M, W is the mass of the structure, ρ i the density of material for element i, t i ∈ {0, 1} the topological variable for element i, A i the cross-section area of element i, l i the length of the bar element i, σ i the stress in element i, E i the elastic modulus of material i, and I i the area moment of inertia of element i.
3.2 Examples
Three benchmark problems commonly found in the literature are discussed in this section. For these calculations the DAKOTA (Eldred et al. 2007) platform was used, with the single-objective method as the basis for the optimization scheme. For all single objective problems, the iterative procedure is stopped when the best (feasible) fitness values of the population do not improve significantly over ten generations, or the limit value of the number of function evaluation or iterations has been reached. The built-in DAKOTA ‘multi-point binary crossover’ and ‘merit function fitness type’, with a ‘favor feasible’ replacement scheme were used. Furthermore, constraint penalization and an ‘offset normal’ mutation type were used. Further information on these genetic operators can be found in the reference above. In all examples the number of function evaluations refers to the number of calls to the FE model. In practice the computational effort required to produce the initial population is negligible compared to the total computational cost. In the examples discrete sizing variables were considered. Ten runs of each problem were made, each with a different initial population.
3.2.1 10 bar 2D truss: sizing and topology optimization
A comparison is made between a single-objective GA with kinematically stable initial population (here referred to simply as SOGA) and the results obtained by Deb and Gulati (2001), as well as the results of Hajela et al. (1993). Next these results are compared to the results of the single-objective KSR algorithm. In this example, the sizing and the topology of the structure are optimized concurrently.
The constraints on the problem do not include the buckling constraint (3), in order to conform to the same problem statement as the reference works.
Parameters The ground structure is shown in Fig. 12. The geometric and material parameters used are found in Table 1, while the genetic algorithm parameters are summarized in Table 2.

10 bar truss ground structure
Results The optimal topology for this problem is well known (Fig. 13).

10 bar problem: optimized truss structure
The SOGA with a randomly seeded initial population did not converge within a reasonable time (270 iterations). The SOGA with a kinematically stable initial population did, however, converge after an average of 215 generations. The results of the best solutions of the ten runs are shown in Table 3. The SOGA with kinematically stable initial population outperforms the results found in Hajela et al. (1993), having a marginally smaller mass by about 0.3%. However, it fails to match or surpass the results in Deb and Gulati (2001) who used a real-coded GA in which individuals are penalized after the kinematic stability has been evaluated.
The KSR algorithm converges on average after only 89 generations, and finds (in the majority of cases) the same solution as that found by Deb and Gulati. In Fig. 14, the maximum, minimum and average values (including non-feasible solutions) of the objective functions are shown for successive generations of the best performing solution which converges after 70 generations. In Fig. 15, the average function values of the best performing SOGA and KSR runs are shown for the first 70 generations. During the initial generations many non-feasible solutions with low mass are retained, leading to lower average masses. A process of penalization gradually increases the number of feasible solutions in the SOGA population until a peak is reached at which time the average masses decrease once more. This is far less pronounced in the KSR population, with the peak being reached very early on. Theoretically, the two algorithms have very similar initial populations. The repair procedure greatly reduces the amount of structures penalized for being unfeasible. This example demonstrates the advantages of the KSR approach over the traditional penalization approach.

10 bar 2D problem: convergence of KSR algorithm

10 bar 2D problem: comparison of average objective function values (first 70 generations)
3.2.2 14 bar 2D truss: sizing and topology optimization
In this example a 2D 14 bar truss with the same parameters as the previous example is investigated. The ground structure is shownFootnote 6 in Fig. 16.

14 bar truss ground structure
Results For this problem the same topology found in the previous problem (Fig. 13) has been found using a multistage algorithm (Hajela and Lee 1995) in the literature. However using the KSR algorithm (and even the SOGA with stable initial population) a different topology is found (Fig. 17). A comparison of the (stress and displacement constrained) problem solutions is shown in Table 4. Note that the mass objective function of this truss optimization (in all cases) is smaller than in the previous example. This is due to the larger search space made possible by a greater number of variables. The KSR algorithm finds a smaller mass than found by Hajela and Lee, by about 4%. The KSR algorithm also finds a lower mass than the SOGA with stable initial population.

Solution to the 14 bar sizing and topology optimization
3.2.3 25 bar 3D truss: sizing and topology optimization
In this example a benchmark 3D structure is optimized (Fig. 18). Both sizing and topology variables are considered. The results are compared to (Kaveh and Kalatjari 2003), in which an initial population of good candidates is produced, followed by the systematic reduction of the search space.

25 bar 3D problem
Parameters The member cross-section areas are selected from the discrete set {1.255, 2.142, 3.348, 4.065, 4.632, 6.542, 7.742, 9.032, 10.839, 12.671, 14.581, 21.483, 34.839, 44.516, 52.903, 60.258, 65.226}. The Young’s modulus for the material used is E = 68.97 × 109 N.m − 2 and density of the material is ρ = 27126.4 N.m − 3. Two load cases are considered (Table 5). The buckling data and variable definition can be found in Kaveh and Kalatjari (2003). The maximum deflection of the structure is set at δ max = 8.89 mm. In this case only chromosome repair is implemented in the modified GA. A population size of 50 was chosen, however no stable initial population is created to show the improvement achieved by KSR only.
Results The solution obtained is shown in Fig. 19 and the cross-section areas in Table 6. This solutions are both identical to that found in the reference work, finding the same mass, however with slightly improved performance (Table 7).

25 bar 3D problem topology after optimization
In this example it can be seen that kinematic stability repair has a positive effect on the efficiency of the algorithm. 81.25% of the possible topologies are found to be unstable. This structure only has eight independent topology variables. In practice, one topology variable can be eliminated since it is always necessary for the stability of the structure. Problems such as this are of little interest as they present few challenges to current topology optimization algorithms. However this problem illustrates the efficacy of the method even on small scale 3D problems, where symmetry has been taken into account. The key to implementing the repair procedure is the appropriate parameterization of the structure so that stability and instability can be identified correctly.
3.2.4 Conclusions
In the above examples—using the KSR algorithm—the optimal topology is found, and begins to dominate the population, after only a few generations. The remaining iterations are necessary mainly to refine the sizing of the bars. The sizing optimization is not the focus of this investigation, however to be able to compare results it has been introduced. The algorithm remains valid and advantageous with this adjustment. It is clear that the multistage approach is not always beneficial. Unmodified, randomly seeded GA’s may require particularly large convergence times compared to the modified KSR GA. The stable initial population improves the performance of the GA significantly. The advantages of the algorithm are expected to be greater in larger problems. The repair approach outperforms the penalization techniques used in the reference works which do not explicitly take structural knowledge into account. If, as in most studies, the kinematic stability is taken to be a binary condition, it is not possible to meaningfully penalize kinematically unstable solutions as a function of the degree to which the constraint has been violated.
4 Multiobjective topology optimization
4.1 Problem formulation
The multiobjective problems in this section make use of the objective function and constraints in Section 3.1. In addition the dynamical objective function and the maximum deflection objective function are introduced:
where ω n,0 is the smallest (first) natural frequency of the structure. The response of a structure to excitation depends largely on the first few natural frequencies (Xie and Steven 1996). In the literature dynamic aspects of the structure have been handled as constraints for discrete structures (Tong and Liu 2001; Jin and De-yu 2006; Gomes 2011), or explicitly as an objective function for continuum topology optimization (Pedersen 2000; Huang et al. 2010). Here we wish to maximize the smallest (first) natural frequency of the structure.
4.2 Examples
Three problems are discussed in this section. For these calculations the DAKOTA Multiobjective Genetic Algorithm (MOGA) was used. This method performs Pareto optimization using a metric tracker to evaluate the convergence of the algorithm. This tracker evaluates three metrics associated with consecutive Pareto fronts and is described in detail in Eldred et al. (2007). This method has much in common with the aforementioned SOGA method implemented by DAKOTA. Therefore, the modifications to the SOGA and the MOGA algorithms were not significantly different. The algorithm is judged to have converged once the value of the metric tracker does not change significantly for ten generations. The built-in DAKOTA multi-point binary crossover and domination count fitness type, with a ‘below limit’ (with a value of 6) replacement scheme were used. Furthermore, constraint penalization and an ‘offset normal’ mutation type were used.
4.2.1 14 bar 2D truss: topology optimization
The 14 bar truss example with only topology variables is used to demonstrate the effectiveness of this algorithm on small-scale examples. The ground structure and geometry (with the exception of the cross-section which is constant in this problem) are identical to that in Fig. 16. The KSR algorithm is tested against the MOGA algorithm with a stable initial population.
Parameters The objective functions considered are the total mass (1) of the structure and the maximum vertical nodal displacement (6). The structure is subject to constraints on the stresses in the elements (2) only, while only topology variables are considered. The genetic algorithm parameters for both algorithms are summarized in Table 8.
Results A comparison of the two algorithms performances is shown in Table 9. The Pareto optimal set can be seen in Fig. 20. Clearly there are advantages in terms of computational performance to the modified algorithm. The KSR algorithm converges on average several times faster than the MOGA. In Fig. 21 the generational distance metric, relative to the Pareto optimal solution, for successive generations of the best solutions out of the 10 MOGA and KSR runs is shown. Clearly the KSR algorithm is advantageous in terms of convergence.It is worth noting that on average, for this problem 3 of the solutions in the Pareto optimal set were found in the initial population using procedures 1 and 2. While this is a relatively large proportion, it is expected that the likelihood of finding these optimal solutions simply by generating an initial population will decrease as the problem becomes larger.

14 bar 2D truss: Pareto optimal topologies

14 bar 2D truss: best solution convergence relative to reference solution
4.2.2 54 bar 2D truss: topology optimization
The KSR algorithm is specifically aimed at large scale problems with binary topology variables. The 54 bar cantilever problem discussed in this section is of this type. The objective functions in this problem are the mass and first natural frequency of the structure ω n,0, expressed in (5) and the constraints include the stress constraint on the members (2), the buckling of the members (3) and the deflection constraint (4).
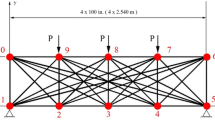
Parameters The ground structure is shown in Fig. 22. The two nodes on the left of the structure are restrained in both vertical and horizontal direction. Four cases are considered. In the first three cases symmetry considerations are not implemented to reduce the size of the problem, which consists of a length 54 vector of discrete binary design variables. A study of the 29 variable symmetric problem was also made to show the the effects of forcing symmetry. The geometric and material parameters characterizing the problem can be found in Table 10 and the GA parameters in Table 11. The nominal cross-section area is chosen as \(A_{nom}=2\times10^{-3}\) m2.

54 bar cantilever truss ground structure
Results The Pareto fronts of the best performing MOGA with stable initial population, the symmetric problem and the multiobjective KSR algorithm can be seen in Fig. 23. Solution of the symmetric problem relied on the MOGA with a stable initial population. The generational distance between the MOGA and KSR Pareto fronts is found to be I GD = 0.0707. The MOGA algorithm, for all all but one of the runs, reached the maximum number of iterations (500) before satisfying the convergence criterion. The topologies in the Pareto optimal sets are also shown in Fig. 23. Note the asymmetry in the topologies where no symmetry was forced, and their superiority to the symmetric solutions. While the problem is geometrically symmetrical, the presence of the buckling constraint introduces asymmetry, namely the absence of the constraint in tension elements. It is also noted that the buckling constraint is active in all of the above topologies. Furthermore, the use of discrete design variables can have the effect of producing asymmetric topologies even in symmetrical problems (Achtziger and Stolpe 2007). The generational distance between the KSR and symmetric Pareto fronts is 0.1563.

54 bar MOGA: Pareto fronts
The different methods on average produce varying numbers of Pareto optimal solutions (Table 12). The objective function values of the feasible individuals in the initial population are shown in Fig. 24. 30% of the initial population was generated randomly (in region C), while 35% of the population was generated using procedure 1 (in region B) and the remainder using procedure 2 (in region A). Furthermore the two procedures tend to produce individuals with objective function values favoring one or the other objective function, as hypothesized. The combination of procedures allows for a greater range in the Pareto front and therefore reduced drift. Table 13 shows the results of trials carried out with various initial population compositions and demonstrates advantages of using both procedures 1 and 2. This strategy allows for more accurate solutions on average, and slightly faster convergence to these solutions.

54 bar MOGA initial population: procedure 1, procedure 2 and randomly seeded individuals
The optimization algorithm with chromosome repair is shown to be highly advantageous in terms of average convergence time and finds a wider range of solutions in the Pareto optimal set. It is also clear that the multiobjective KSR algorithm finds significantly better performing solutions than the MOGA.
4.3 Cantilevered 3D structure: topology and sizing optimization
A cantilevered structure, consisting of a steel spacial truss combined with a reinforced concrete deck, is optimized using the KSR algorithm. The truss elements are connected at nodes in the deck, so that the two portions work together to ensure the strength, stiffness and stability of the structure. The algorithm was used in an initial design stage to find a ‘good’ configuration for the truss elements. For architectural reasons the distribution of the nodes is asymmetrical and irregular (Fig. 25). The reinforced concrete deck is taken into account in the FEM analysis.

3D cantilevered structure: nodal positions
Parameters The loading on the structure can be seen in Fig. 26. Nodes 1 and 2 are loaded in the y-direction with 344,228 N and are unrestrained. Edge A-B of the plate is loaded with a line load of 237,922 N.m − 1 in the y-direction, and 50,491 N.m − 1 vertically, and is unrestrained. The deck A-B-C-D is loaded with an evenly distributed vertical loading of 10,200 N.m − 2. This loading is a combination of live loads and the self-weight of the deck. The self weight of the truss is neglected in the initial design stage. Edge C-D is restrained in all degrees of freedom (including rotationally), with the exception of vertical translation. Nodes 3 and 4 are translationally restrained in the three spatial directions, but are free to rotate. The nodal positions are given in Table 14. The ground structure, with 41 topology variables (dark solid lines) is shown in Fig. 27. For the generation of the stable initial population and the KSR procedure the effect of the deck is represented by a number of (non-variable) connectivities (dashed lines) lying in the plane of the deck. An initial population consisting of 60% stable structures (using an equal number of individuals produced by the 3D variations of procedures 1 and 2) was created. The objectives and constraints considered were the same as in the previous example. The solid circular cross sections (all bar elements with the same section area) were selected from the following set: {12.5, 15.9, 19.6, 23.8, 28.3, 33.2, 38.5, 44.2, 50.3, 56.7, 63.6, 70.9, 78.5, 86.6, 95.0} × 10 − 4 m2. The material parameters and maximum allowed deflection are found in Table 15 and the GA parameters in Table 16.

3D cantilevered structure: loading

3D cantilevered structure: ground structure
Results Of the ten runs carried out for this problem, the best performing Pareto optimal front is shown in Fig. 4.3. The average number of generations required for convergence was 276. The front, containing 285 solutions,is shown along with roughly every 20th solution. The cross-section increases constantly as we move from low to high mass solutions. The average generational distance was I GD = 0.0024. In fact the Pareto front can be broken up into sub-fronts according to the cross-section size (denoted by varying shades of grey), without any overlapping. This explains the corrugated appearance of the front: each corrugation is a topology-only Pareto front for a given cross-section. In our approach all but the lowest cross-section are presented in the Pareto front. The spread of solutions along the front and for the various cross sections, is relatively uniform.

3D cantilevered structure: Pareto front
5 Conclusions and future prospects
A novel approach to improve the performance of genetic algorithms in structural optimization with discrete topology variables has been proposed. The procedure makes use of multiple methods of stable initial population generation and chromosome repair of a class of kinematically unstable structures. By implementing these adaptations, knowledge of structural behavior is added to the GA. These additions allow for a compromise between the explorative character of the GA, and the reduction of the search space through addition of information. The procedure has been demonstrated on single-objective academic examples and compares well to the results in the literature. Furthermore, the method has been demonstrated on multiobjective problems and the advantages over unmodified methods shown.
Possible future prospects are listed hereafter:
-
It would appear that a thorough study of the effects of the kinematic stability constraint on the feasible solution set Ω in discrete structural problems would be of great interest, given the lack of attention in the literature. The use of more advanced methods of detecting instability could be investigated, taking inspiration from graph theory and computer science, for example, are a possible future avenue of research. The method using the Singular Value Decomposition of the equilibrium matrix also appears to hold much promise for the improvement of the method since all kinematic instabilities can be detected in this way.
-
Three or more objectives, and, to a lesser extent, multiple loading cases, present challenges to the approach. Adaptation of the method in this way, possibly with an automated scheme for initial population generation by criterion selection, can produce a more general method.
-
The integration of shape optimization into the procedure, which could lead to a complete multiobjective layout optimization method. Layout optimization of large scale discrete structures, such as grid shells, could benefit greatly from the KSR repair procedure, since kinematic instability is frequently encountered in this type of problem.
-
There is much scope for investigations into decision making and user preferences (Filomeno Coelho and Bouillard 2005) as well as the handling of uncertainties (Filomeno Coelho et al. 2010) .
-
Global elastic stability of the truss structure has not been discussed here. Some research has been done in this area using nonlinear programming (Ben-Tal et al. 2000). This is an important constraint in practice, which would make the method more relevant for practical application.
-
For large scale problems, the ground structure approach may not be the most efficient. Making use of other methods of representing the design domain, for example using a variable chromosome length, may be fruitful as an adaptation of the KSR method.
Notes
DOF = dn − m − n s , where d is the dimension, n is the number of nodes, m the number of bar members and n s the number of degrees of freedom constrained by the supports. It should be verified that DOF is not positive.
This does not include unconnected nodes.
Note that the structures conform to the Chebyshev–Grübler–Kutzbach criterion.
During collinear/planar repair, it is ensured that the number of elements removed does not lead to the node connected to one or two elements, respectively in 2D and 3D problems. This is to avoid connectivity violations, while technically satisfying the collinear/planar check.
Note that the problem of singular topologies is eliminated through the presence of the topology variable.
In the figures one of the two overlapping members is drawn below or above the other to avoid confusion. These members are connected to the nodes above or below them at the end points only.
References
Achtziger W, Stolpe M (2007) Truss topology optimization with discrete design variables’ guaranteed global optimality and benchmark examples. Struct Multidisc Optim 34:1–20
Balling R, Briggs R, Gillman K (2006) Multiple optimum size/shape/topology designs for skeletal structures using a genetic algorithm. J Struct Eng 132:1158
Ben-Tal A, Jarre F, Kočvara M, Nemirovski A, Zowe J (2000) Optimal design of trusses under a nonconvex global buckling constraint. Optim Eng 1(2):189–213
Cheng FY, Li D (1997) Multiobjective optimization design with pareto genetic algorithm. J Struct Eng 123(9):1252–1261
Coello Coello C (1999a) A comprehensive survey of evolutionary-based multiobjective optimization techniques. Knowl Inf Syst 1(3):129–156
Coello Coello C (1999b) A survey of constraint handling techniques used with evolutionary algorithms. Laboratorio Nacional de Informatica Avanzada, Veracruz, Mexico, Technical report Lania-RI-99-04
Coello Coello C, Lamont G, Van Veldhuizen D (2002) Evolutionary algorithms for solving multi-objective problems. Springer, New York
Deb K, Gulati S (2001) Design of truss-structures for minimum weight using genetic algorithms. Finite Elem Anal Des 37(5):447–465
Dorn W, Gomory R, Greenberg H (1964) Automatic design of optimal structures. J Méc 3:25–52
Eldred MS, Adams BM, Haskell K, Bohnhoff WJ, Eddy JP, Gay DM, Griffin JD, Hart WE, Hough PD, Kolda TG, Martinez-Canales ML, Swiler LP, Watson JP, Williams PJ (2007) DAKOTA, a multilevel parallel object-oriented framework for design optimization, parameter estimation, uncertainty quantification, and sensitivity analysis: Version 4.1 reference manual. Tech. Rep. SAND2006-4055, Sandia National Laboratories, Albuquerque, New Mexico
Filomeno Coelho R, Bouillard P (2005) A multicriteria evolutionary algorithm for mechanical design optimization with expert rules. Int J Numer Methods Eng 62(4):516–536
Filomeno Coelho R, Lebon J, Bouillard Ph (2010) Hierarchical stochastic metamodels based on moving least squares and polynomial chaos expansion—application to the multiobjective reliability-based optimization of 3D truss structures. Struct Multidisc Optim 43(5):707–729
Fonseca C, Fleming P et al (1993) Genetic algorithms for multiobjective optimization: formulation, discussion and generalization. In: Proceedings of the fifth international conference on genetic algorithms, vol 423, pp 416–423
Gil L, Andreu A (2001) Shape and cross-section optimisation of a truss structure. Comput Struct 79(7):681–689
Goldberg DE (1989) Genetic algorithms in search, optimization and machine learning. Addison-Wesley, Reading, XIII, 412 pp. DM 104.00
Gomes HM (2011) Truss optimization with dynamic constraints using a particle swarm algorithm. Expert Syst Appl 38:957–968
Hajela P, Lee E (1995) Genetic algorithms in truss topological optimization. Int J Solids Struct 32(22):3341–3357
Hajela P, Lee E, Lin C (1993) Genetic algorithms in structural topology optimization. In: Bendsøe M, Soares C (eds) Topology design of structures. Kluwer Academic, Dordrecht, pp 117–134
Huang X, Zuo Z, Xie Y (2010) Evolutionary topological optimization of vibrating continuum structures for natural frequencies. Comput Struct 88(5–6):357–364
Jin P, De-yu W (2006) Topology optimization of truss structure with fundamental frequency and frequency domain dynamic response constraints. Acta Mech Solida Sinica 19(3):231–240
Kaveh A, Kalatjari V (2003) Topology optimization of trusses using genetic algorithm, force method and graph theory. Int J Numer Methods Eng 58(5):771–791
Kawamura H, Ohmori H, Kito N (2002) Truss topology optimization by a modified genetic algorithm. Struct Multidisc Optim 23(6):467–473
Madeira J, Rodrigues H, Pina H (2006) Multiobjective topology optimization of structures using genetic algorithms with chromosome repairing. Struct Multidisc Optim 32(1):31–39
Mathakari S, Gardoni P, Agarwal P, Raich A, Haukaas T (2007) Reliability-based optimal design of electrical transmission towers using multi-objective genetic algorithms. Comput-Aided Civil Infrastruct Eng 22(4):282–292
Ohsaki M (1995) Genetic algorithm for topology optimization of trusses. Comput Struct 57(2):219–225
Papadrakakis M, Lagaros N, Plevris V (2002) Multi-objective optimization of skeletal structures under static and seismic loading conditions. Eng Optim 34(6):645–669
Pedersen N (2000) Maximization of eigenvalues using topology optimization. Struct Multidisc Optim 20:2–11
Pellegrino S (1993) Structural computations with the singular value decomposition of the equilibrium matrix. Int J Solids Struct 30(21):3025–3035
Rozvany G (1996) Difficulties in truss topology optimization with stress, local buckling and system stability constraints. Struct Multidisc Optim 11(3):213–217
Rozvany G (2001) On design-dependent constraints and singular topologies. Struct Multidisc Optim 21(2):164–172
Ruiyi S, Liangjin G, Zijie F (2009) Truss topology optimization using genetic algorithm with individual identification technique. In: Ao SI, Gelman L, Hukins DW, Hunter A, Korsunsky AM (eds) Proceedings of the world congress on engineering 2009 vol II WCE ’09, 1–3 July 2009, London, UK
Ruy W, Yang Y, Kim G, Yeun Y (2001) Topology design of truss structures in a multicriteria environment. Comput-Aided Civil Infrastruct Eng 16(4):246–258
Schaffer J (1985) Multiple objective optimization with vector evaluated genetic algorithms. In: Proceedings of the 1st international conference on genetic algorithms, pp 93–100
Šešok D, Belevicius R (2008) Global optimization of trusses with a modified genetic algorithm. J Civ Eng Manag 14(3):147–154
Statnikov R, Bordetsky A, Matusov J, Sobol I, Statnikov A (2009) Definition of the feasible solution set in multicriteria optimization problems with continuous, discrete, and mixed design variables. Nonlinear Anal: Theory Methods Appl 71(12):e109–e117
Su R, Wang X, Gui L, Fan Z (2011) Multi-objective topology and sizing optimization of truss structures based on adaptive multi-island search strategy. Struct Multidisc Optim 43(2):275–286
Taylor RL (2008) FEAP—a finite element analysis program. Version 8.2 user manual
Tong WH, Liu GR (2001) An optimization procedure for truss structures with discrete design variables and dynamic constraints. Comput Struct 79(2):155–162
Xie YM, Steven GP (1996) Evolutionary structural optimization for dynamic problems. Comput Struct 58(6):1067–1073
Zitzler E, Thiele L, Laumanns M, Fonseca C, Da Fonseca V (2003) Performance assessment of multiobjective optimizers: an analysis and review. IEEE Trans Evol Comput 7(2):117–132
Acknowledgement
The first author would like to thank the Fonds de la Recherche Scientifique (FNRS) for financial support of this research.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Richardson, J.N., Adriaenssens, S., Bouillard, P. et al. Multiobjective topology optimization of truss structures with kinematic stability repair. Struct Multidisc Optim 46, 513–532 (2012). https://doi.org/10.1007/s00158-012-0777-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00158-012-0777-5