
Abstract
Bi-Level Integrated System Collaborative Optimization (BLISCO) is a new multidisciplinary design optimization (MDO) method based on Bi-Level Integrated System Synthesis (BLISS) and Collaborative Optimization (CO). The key ideas of BLISCO are to replace compatibility constraint with the sum of coupled outputs as an integrated objective of subsystems and to decompose design variables into system design variables and subsystem design variables, while maintaining the collaborative mechanism of CO. One mathematical example and two engineering problems are used to test the effectiveness of BLISCO under the platform of iSIGHTTM. Results from the test cases show that BLISCO has satisfactory convergence, accurate result and reliable robustness.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
- x i :
-
Design variable i in original optimization
- y i :
-
Output i in original optimization
- z i :
-
Design variable i in system-level optimization
- x i :
-
Design variable i in subsystem-level optimization
- J i :
-
Compatibility constraint i in system-level optimization
1 Introduction
With the rapid development of modern engineering, more and more disciplines are involved in the design. In order to solve these complex multidisciplinary problems, traditional optimization methods are to be extended or improved. With the increase of the design variables and organizational complexity, traditional methods face difficulties, which are slowly converging or even not converging at all in modern engineering problems. For the purpose of reducing the organizational complexity and improving the design accuracy and efficiency, Multidisciplinary Design Optimization (MDO) (Sobiesczanski-Sobieski and Haftka 1996) was brought into modern engineering design field to deal with such large coupled systems.
MDO is a methodology for the design of complex engineering systems and subsystems that coherently exploits the synergism of mutually interacting phenomena (Korte et al. 1997). With the development of MDO, there are three important periods. In the first period, three MDO methods are introduced, which are Multidisciplinary Design Feasible (MDF) (Cramer et al. 1994), Individual Discipline Feasible (IDF) (Cramer et al. 1994) and All At Once (AAO) (Cramer et al. 1994). The main characteristics of these three methods are to integrate different codes for monolithic optimization problem, while these methods have difficulties when optimizing slightly more complex engineering problems. In the second period, two MDO methods are introduced, which are Concurrent Subspace Optimization (CSSO) (Renaud and Gabrile 1994) and Collaborative Optimization (CO) (Braun 1996). The main characteristics of these two methods are the architecture of bi-level optimization, which releases the burden of organizational complexity in monolithic optimization. Besides, CO is considered to be promising, because the collaborative thought quite matches the plan of modern engineering design. However, there are still some problems for the two methods. The adoption of compatibility constraint as the subsystem objective in CO leads to difficult convergence during optimization (DeMiguel and Murray 2000; Alexandrov and Lewis 2002). CSSO costs Multidisciplinary Analysis (MDA) and is not suited for problems with large number of design variables (Tedford and Martins 2006a, b). In the third period, Bi-Level Integrated System Synthesis (BLISS) (Sobiesczanski-Sobieski et al. 1998) is introduced. BLISS separates the system design variables from the subsystem design variables, provides the autonomy of subsystem-level optimization, and performs well as solving the problem with large number of subsystem design variables and few system design variables. BLISS-2000 (Sobieszczanski-Sobieski et al. 2002; Kim et al. 2004) is a completely different MDO formulation from BLISS.
In this paper, Bi-Level Integrated System Collaborative Optimization (BLISCO) is proposed, which integrates the collaborative thought of CO and the main characteristic of BLISS-2000. It will be shown to be effective and robust through one mathematical example and two engineering examples.
2 The algorithm of BLISCO
BLISCO is a bi-level optimization method, which divides the design variables into system design variables and subsystem design variables while keeping the collaborative thought of CO. The subsystem objective of BLISCO is not compatibility constraint, but is replaced by the sum of the coupled outputs of subsystems, which is different from CO. Besides, one optimization procedure of the subsystem is just one iterative step of system level optimization, which is different from BLISS-2000.
2.1 Introduction to collaborative optimization
CO belongs to bi-level optimization, which is shown in Fig. 1. The optimization problem is decomposed into two level optimizations. The main task of subsystems are to find local design variables {x i } that satisfy local constraints {g i } and come close to that specified by system-level optimizer as much as possible, while the main task of system is to coordinate the system design variables {z} to ensure the optimization progress towards the optimum and compatibility between the subsystem designs. Besides, {y i } and {J i } are state variables and compatibility constraints respectively. Since the mechanism of CO quite matches the plan of modern engineering design, it is widely studied and applied to engineering problems (Sobieski and Kroo 1996; Braun et al. 1997; McAllister et al. 2002). However, the adoption of compatibility constraint in CO leads to converging difficulty during optimization. In order to overcome this difficulty, many researchers made improvements for CO. Sobieski et al. (1998) proposed the use of response surface estimation instead of the disciplinary optimization in CO, replaced the system objective with penalty function and suggested two approaches to estimate the disciplinary optimal results. However, response surface estimation is a local approximation, and penalty function is utilized as a distinction to Collaborative Optimization. DeMiguel and Murray (2000) proposed a Modified Collaborative Optimization (MCO), which also used penalty function as a distinction. Jang et al. (2005) employed neural network classification to determine whether a design point is feasible or not, and set up the global approximation with Kriging, but the compatibility constraint is not truly approximated, which has discontinuity at the boundary of the feasible and infeasible regions. Therefore, the optimization with approximation model may not be accurate. Zhang (2006) proposed a two-level optimization for aerodynamic/structural integrated design of wings based on CO and AAO. The design variables are divided into system design variables and subsystem design variables, the objectives of aerodynamic subsystem and structural subsystem are weight and lift coefficient respectively. However, this method does not consider coupled output response in subsystem objective, and is not fit for the complex coupled problem which subsystems have the explicit objectives as wing design problem, so the method is lack of generality. Zhao and Cui (2007) applied optimal Latin hypercube design and radial basis function network to Collaborative Optimization, which created the sample points with optimal Latin hypercube design and built the approximation model with radial basis function network. Compared with Jang’s model, the compatibility constraints are better approximated. However, the infeasible sample points will lead to the infeasible region of approximation model, and it will also cause failure to find the optimal solution with approximation model, so the success of this application quite depends on the sample points. Liu and Yao (2007) proposed Low Degree-of-Freedom Collaborative Optimization (LDFCO), which includes two different formulations. The main characteristics different from CO are that design variables are divided into system design variables and subsystem design variables, and penalty function is utilized. Roth and Kroo (2008) introduced Enhanced Collaborative Optimization (ECO). The main idea is to include models of the global objective and all of the subspace constraints in each subspace optimization problem, but it will increase the dimension of subsystem design variables. Due to the impact on ECO’s computational efficiency, the penalty parameters should be chosen reasonably.

The architecture of collaborative optimization
2.2 Introduction to BLISS-2000
BLISS-2000 is a quite different MDO formulation from BLISS, which utilizes the surrogate model to approximate the relationship between outputs of each subsystem and system level design variables. The subsystem objective is the weighting sum of outputs from each subsystem, and the weighting coefficients are system level design variables, which hold constantly and represent the relative importance of each output in subsystem. Compared with BLISS, BLISS-2000 eliminates the optimum sensitivity analysis and the system sensitivity equations, the efficiency is highly improved.
The BLISS-2000 utilizes trust region algorithm to find the optimal value. According to Design of Experiments (DOE), the sample points are created. After the subsystem-level optimization performed at each sample point, the approximation models between outputs of each subsystem and system level design variables can be set up. Then, the system optimization is performed with the approximation models. If the design history does not converge, the lower and upper bounds of design variables will be updated for the next iterative step. This procedure will continue until the convergence. For BLISS-2000, Kim et al. (2004) pointed out that the accuracy of approximation model was critical to the success of the BLISS procedure.
The formulation of BLISS-2000 is as follows:
The subsystem-level optimization
where z, y ∗ and w are system level variables, and y ∗ represent the coupled input variables. These variables are passed from the system and hold constant during the subsystem-level optimization. x is the subsystem level design variable, and y i is the output of subsystem.
The system optimization
where f is the system level objective, and y ∧ are the surrogate models of coupled response variables which are set up during the subsystem-level optimization.
However, Brown (2004) pointed out that the greatest obstacle to the acceptance of BLISS is the fact that it was “crafted” as opposed to “rigorously derived.” Tedford and Martins (2006a, b pointed out that BLISS-2000 may not perform efficiently for problems which exhibit a high bandwidth of coupling, and the system iterative process used for ensuring approximation model accuracy could further magnify the effects of increasing dimensionality on the construction of approximation. Besides, if the initial values of design variables and corresponding bounds are not properly specified, the BLISS-2000 will perform lots of system iteratives to converge, which will reduce the computational efficiency.
2.3 BLISCO
In order to improve the converging difficulty of CO and eliminate the system iteratives of BLISS, Bi-Level Integrated System Collaborative Optimization (BLISCO) is developed.
BLISCO belongs to bi-level optimization, which is shown in Fig. 2. In order to maintain the collaborative mechanism of CO, the subsystem level optimization is embedded in the system level optimization. The design variables are decomposed to system level design variables z and subsystem design variables x. In subsystem-level optimization, the objective is the sum of coupled outputs from the corresponding subsystem, and the system-level design variables hold constantly during the procedure of subsystem-level optimization. In system-level optimization, the optimal coupled output responses and state variables directly related with the system objective are passed from the subsystem. Besides, there are output-input equalities between the optimal coupled output responses and corresponding system design variables in the system-level optimization. Since BLISCO decomposes the design variables into system design variables and subsystem variables the same as BLISS while maintaining the collaborative mechanism of CO, it is named as BLISCO, which is the combination of BLISS and CO.

The architecture of BLISCO
The key ideas of BLISCO are to replace compatibility constraint with the sum of coupled output responses as an integrated objective of subsystems and to decompose design variables into system design variables and subsystem design variables, which come from the mechanism of BLISS-2000. However, compared with the “crafted” fact of BLISS, BLISCO is derived as follows.
The system objective f can be expressed as a function of system design variables {z} by the linear part of the Taylor series:
where D(f, z) is the derivative of f with respect to the system design variables {z}.
Since the output-input equalities ensure that the system design variable z y equal to the corresponding y ∗ , the third term in the right side of (3) can be rewritten as
which is used as the subsystem objective. This formulation reflects a “synthetic” influence of the subsystem on the entire system objective, and has the similar form as BLISS-2000. Besides, the {D(f, z y )} in BLISCO validates the significance of {w} in BLISS-2000.
There are two methods for the calculation of D(f, z y ). The first one is that D(f, z y ) is obtained by derivation before the subsystem-level optimization, so the subsystem-level optimization will not be influenced by the calculation of D(f, z y ), and can be performed in distributed and concurrent process. The other is that D(f, z y ) is obtained by finite difference method after the subsystem optimization, which will not join the distributed and concurrent process later.
In CO, the subsystem optimization objective {J i } is generally nonsmooth functions of the system design variables {z}, so Roth and Kroo (2008) pointed out that the Lagrange multipliers in subsystem problems are either zero or converge to zero as local design variables {x i } converges to system design variables {z}, this can adversely affect subsystem optimization convergence. However, the subsystem optimization objective of BLISCO is the sum of coupled outputs from the corresponding subsystem, so the Lagrange multipliers will not be zero due to the influence from compatibility constraints. Therefore, the subsystem optimization convergence of BLISCO is better than CO, this will improve the converging difficulty of CO.
Besides, although BLISCO extracts the main characteristic of BLISS-2000, BLISCO is still different from BLISS-2000. The comparison is made as follows:
-
1.
The key point of BLISS-2000 is the approximation model which constructs the relationship between system level variables and coupled response variables, while the key point of BLISCO is the calculation of derivative of system objective with respect to the system design variables.
-
2.
BLISS-2000 needs system iterative process, while BLISCO maintains the collaborative mechanism of CO.
3 MDO test problems
In order to test the performance of BLISCO, three examples are adopted. The first one is a typical nonlinear inequality constraint optimization problem, the second one is speed reducer optimization and the third one is electronic packaging optimization, which is a strong coupled MDO test problem. Speed reducer optimization and electronic packaging optimization are MDO benchmark optimization problems of NASA (Padula et al. 1996). Most optimizations in this paper are performed with iSIGHT.
3.1 Mathematical example
This mathematical example was introduced by Sellar et al. (1996) to test the concurrent subspace optimization based on response surface. It is a nonlinear inequality constraint optimization problem, which is specified as follows:
where the \(y_{1{\it allowable}}\) and \(y_{2{\it allowable}}\) is set to be 8 and 24 respectively.
This problem has two subsystems: CA1 and CA2, which are described as follows:
These two subsystems are linked by two coupled variables: y 1 and y 2, and the shared design variables are x 1 and x 3, so the system design variables of BLISCO are {x 1, x 3, y 1, y 2}. Since there is no local design variable in CA2, it does not need optimization and can be combined into system-level optimization. Therefore, there is only one subsystem-level optimization for this problem.
The formulation of BLISCO is as follows.
System-level optimization:
where \(f_1^\ast \) and \(y_{_{1l} }^\ast \) are the optimal f 1 and y 1l passed from the subsystem-level optimization respectively. Besides, the rigorous equality constraints often lead to converge slowly for nonlinear optimization problem, so it can be replaced by inequality constraints which require the sum of squares to be less than a small tolerance ε, which is 1E-5 for this problem.
Subsystem-level optimization:
where x 1s , x 3s and y 2s are system design variables and hold constantly during the subsystem optimization. The derivative of system objective f w.r.t. system design variable y 1s is derived as follows:
Roth and Kroo (2008) presented the global and local optimal objective values of this problem, which are 8.00286 and 8.9867 respectively. In order to test the effectiveness of the BLISCO, four different initial points, chosen as same as paper (Roth and Kroo 2008), are given in Table 1. The method used in system-level and subsystem-level optimizations is NLPQL (Sequential Quadratic Programming), and the optimization results with BLISCO are shown in Table 2.
From Table 2, only the optimization with initial point B converged with the local optimal point, which because the optimization method based on gradient may run into the local optimal region. Therefore, some modifications are applied for this problem. The system level optimization constraints are replaced by rigorous equality constraints and Generalized Reduced Gradient (LSGRG2) is employed as the optimization method. LSGRG2 performs better than NLPQL for equality-constrained problem, so LSGRG2 is used to solve the BLISCO model with rigorous equality constraints. After the optimization, the optimal point is (3.0287, 0, 0) and the corresponding objective value is 8.00286.
CO and ECO are applied to this problem (Roth and Kroo 2008). Compared with these two methods, it is concluded as follows:
-
1.
BLISCO and ECO can find the global optimal point with four initial points, but CO cannot find the global optimal point with initial point A. Therefore, BLISCO and ECO are more robust than CO for this mathematical example.
-
2.
Although ECO finds the global optimal point with the least system iterations among three methods, it increases the dimension of system design variable and subsystem design variables, and it still needs the penalty factor, which influences the ECO’s computational efficiency and should be chosen reasonably. On the contrary, BLISCO has a smaller dimension of design variable than ECO, and does not need to determine the penalty factor.
3.2 Speed reducer optimization
Speed reducer optimization is one of the ten benchmark examples (Padula et al. 1996) which are used by NASA to provide the MDO researchers with some problems to develop new method and to compare with different MDO methods. This problem represents minimization of speed reducer weight with strength constraints, which is posed as an artificial multidisciplinary design problem comprising the coupling between gear design and shaft design disciplines. The mathematical model is as follows:
The formulation of BLISCO is as follows.
System-level optimization:
where \(y_2^\ast \) and \(y_3^\ast \) are the optimal y 2 and y 3 passed from the subsystem level optimization respectively. Since there is no “nature” coupled variable y s in this problem, the coupled variables are created as targets imposed on each of subsystem output responses, and the inequality constraints ensure that y i match those y is targets. ε is a small tolerance, which is 1E-5 for this problem.
Subsystem 1 optimization:
where x 1s , x 2s and x 3s are system design variables and hold constant during the subsystem 1 optimization.
Subsystem 2 optimization:
where x 1s , x 2s and x 3s are system design variables and hold constant during the subsystem 2 optimization.
Azarm and Li (1989) presented that the optimal point of this problem is (3.5, 0.7, 17, 7.3, 7.71, 3.35, 5.29), and the optimal objective value is 2,994. In order to test the effect of the BLISCO, four different initial points, chosen as same as paper (Zhao and Cui 2007), are given in Table 3. The method used in system-level and subsystem-level optimizations is NLPQL (Sequential Quadratic Programming), and the comparison of BLISCO with CO is shown in Table 4.
From Table 4, the optimization with BLISCO converged to the global optimal value for all initial points, and the corresponding optimal point is (3.5, 0.7, 17, 7.3, 7.7153, 3.3502, 5.2867), while CO is sensitive to the initial point and difficult to find the optimal point. Compared with CO, BLISCO is more robust and accurate for the speed reducer optimization.
3.3 Electronic packaging optimization
Electronic packaging is another standard example (Padula et al. 1996) which is used by NASA. It is a typical MDO problem with strong coupling between electrical and thermal subsystems. In this complex coupled system, the operating temperatures are influenced by component resistance, while the resistance depends on temperature, which is shown in Fig. 3. The objective is to maximize watt density for the electronic package while satisfying the constraints, which require the current through the two resistors to be equal and the operation temperatures of the resistors to be below a threshold temperature. The mathematical model is as follows:
Thermal subsystem
Electronic subsystem
where U 0 and T 0 are the voltage and the temperature respectively, which are set as follows: U 0 = 10 V and T 0 = 20°C. The component temperatures y 11 and y 12 are the implicit functions of resistors’ power dissipation {y 6, y 7} and heat sink’s dimension {x}, and obtained through finite difference method.

The coupled relationship between two subsystems
The formulation of BLISCO is as follows.
System-level optimization:
where ε is a small tolerance, it is 1E-5 for this problem.
Thermal subsystem-level optimization:
Electronic subsystem-level optimization:
Since y 1 is passed from thermal subsystem to system-level optimization and used as the system objective, the objective of thermal subsystem-level optimization is the system objective. It is because that the minimization of system objective in the thermal subsystem-level optimization reflects the total influence of the thermal subsystem on the entire system objective. Besides, the equality constraint of problem (15) requires that
Combining (16), (17) and (32), we can obtain that
Combining (20), (21) and (33), we can also obtain that
Since U0 = 10 V, it can be derived that
then, from (20)–(22), (25) and (26), we can obtain that
According to the BLISCO model of system-level optimization, we can obtain that
Therefore, D(f, z 2) and D(f, z 3) can be derived from (35)–(39):
Since D(f, z 2) and D(f, z 3) both are positive values, the electronic subsystem-level optimization is transformed to the following optimization problem:
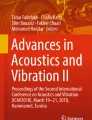
Renaud and Gabrile (1994) solved electronic packaging problem with nonhierarchic algorithm based on approximation, but it still needed system analysis, which was not fit for large complex coupled problem. Kodiyalam (1998) applied CO to electronic packaging problem with four initial points under the platform of iSIGHT, but two cases failed to converge to a Kuhn–Tucker point, and the other two cases failed to find the global optimal point. Yu et al. (2003) changed the temperature with T 0 = 10°C, and solved this problem with Collaborative Optimization based on genetic algorithm, which improved the robustness of CO. However, the system evaluations are increasing enormously and the efficiency is low. In order to compare BLISCO with CO, four different initial points are selected and shown in Table 5. The method used in system-level and electronic subsystem-level optimizations is NLPQL (Sequential Quadratic Programming), and the method used in thermal subsystem-level optimization is Generalized Reduced Gradient (LSGRG2). The comparison between BLISCO and CO is shown in Tables 6 and 7, and the convergence history of objective value for BLISCO is shown in Fig. 4.

Convergence history of system objective value for BLISCO
From Tables 6 and 7, CO failed to converge to a Kuhn–Tucker point for the original problem with four different initial points, while BLISCO converged to the global optimal value for all initial points, and the system evaluations are much less than the method in the paper (Yu et al. 2003). The optimal point found by BLISCO is (0.05, 0.05, 0.01, 0.05, 10.0, 0.004027, 10.0, 0.004), and the corresponding system design variables are (12.508, 12.509, 82.350, 82.773). Renaud and Gabrile (1994) solved electronic packaging problem and gave the optimal result \(y_{1}=-635\text{,}961.0\). Compared with this result, BLISCO achieves better value while satisfying the constraints. It is obviously that the robustness, accuracy and computational efficiency of BLISCO are better than the performance of CO for this complex coupled problem.
Besides, in order to compare BLISCO with BLISS-2000 quantitatively, BLISS-2000 is applied to electronic packaging optimization. Since the strategy of BLISS-2000 is more complex than BLISCO, MATLAB is utilized as programming and computing platform for BLISS-2000. The method used in system-level and subsystem-level optimizations is Sequential Quadratic Programming. The results of BLISS-2000 are shown in Tables 8 and 9.
From Tables 8 and 9, BLISS-2000 did not converge, and the optimal results were far from the true optimal results. It is because the approximation model is not accurate that leads to the non-convergence. In order to solve this problem, two methods can be used to improve the accuracy of approximation model. The first is to increase the number of sample points, but it will also increase the total calculation. The other is to shrink the bound intervals of design variables, which is adopted here to construct the approximation model. The results of BLISS-2000 after shrinking the bound intervals are shown in Tables 10 and 11.
From Tables 10 and 11, BLISS-2000 converged to a point close to the true optimal results. The deviation is because that the approximation model is not accurate enough. In order to compare BLISCO with BLISS-2000 equally, the same bound intervals are applied to the BLISCO. The results of BLISCO after shrinking the bound intervals are shown in Tables 12 and 13.
From Tables 12 and 13, BLISCO converged to the true optimal results with the four different initial points after shrinking the bound intervals.
Therefore, comparing BLISCO with BLISS-2000 from Tables 6, 7, 8, 9, 10, 11, 12 and 13, it can be concluded as follows:
-
1.
The accuracy of approximation model is critical to the success of BLISS. If the bounds of design variables and number of sample points are not properly specified, the approximation model will not be accurate, so BLISS may lead to wrong solution or even non-convergence. In electronic packaging optimization, BLISS-2000 did not converge before shrinking the bound intervals.
-
2.
BLISS-2000 needs lots of system iteratives to converge, while one system iterative takes numerous subsystem evaluations. From Tables 7, 8, 10 and 12, it is clear that BLISS-2000 needs much more subsystem evaluation than BLISCO, so the efficiency of BLISS-2000 is lower than BLISCO for the electronic packaging optimization.
-
3.
The accuracy of BLISS-2000 depends on the approximation model, while the result of BLISCO is always accurate. From Tables 9, 11 and 13, it is clear that BLISCO performs better than BLISS-2000 for the electronic packaging optimization.
4 Summary and conclusions
This paper has developed a Bi-Level Integrated System Collaborative Optimization (BLISCO) method, which integrates the main characteristics of CO and BLISS-2000. The key ideas of BLISCO are to replace the compatibility constraint with sum of coupled outputs as an integrated objective of subsystems and to decompose design variables into system design variables and subsystem design variables, while maintaining the collaborative mechanism of CO. Compared with CO and BLISS, the BLISCO has following advantages: (1) improving the converging difficulty of CO; (2) eliminating the system iterative process of BLISS. Results from the test cases have proved above advantages. The next step will mainly focus on two aspects: (1) promoting the efficiency of BLISCO with approximation model. Most engineering problems need numerous simulations, so the approximation model will be useful for calculating the derivative of system objective with respect to the system design variables. However, the accuracy of approximation model depends on the amounts of sample points, so how to construct efficient approximation model for BLISCO is a main subject in the future research work; (2) applying BLISCO to the conceptual design of Human Occupied Vehicle (HOV) (Liu 2007). The conceptual design of HOV is also a complex MDO problem with a large scale of design variables and state variables. Obviously, MDO can be applied in the HOV conceptual design to search for the best design according to the experiences of MDO methodology in other fields. As a new MDO method, BLISCO reduces the organizational complexity by decomposition, solves the problem with distributed and concurrent process, and converges to the optimal point robustly. Therefore, BLISCO will be a promising tool for the conceptual design of HOV.
References
Alexandrov NM, Lewis RM (2002) Analytical and computational aspects of collaborative optimization for multidisciplinary design. AIAA J 40(2):301–309
Azarm S, Li WC (1989) Multilevel design optimization using global monotonicity analysis. ASME J Mech Trans Auto Des 111(2):259–263
Braun RD (1996) Collaborative optimization: an architecture for large-scale distributed design. Ph.D. thesis, Stanford University
Braun RD, Moore AA, Kroo IM (1997) Collaborative approach to launch vehicle design. J Spacecr Rockets 34(4):478–486
Brown N (2004) Evaluation of multidisciplinary optimization (MDO) techniques applied to a reusable launch vehicle. Special project report, Georgia Institute of Technology
Cramer EJ, Dennis JE, Frank PD, Lewis RM, Shubin GR (1994) Problem formulation for multidisciplinary optimization. SIAM J Optim 4(4):754–776
DeMiguel AV, Murray W (2000) An analysis of collaborative optimization methods. In: Proc. 8th AIAA/USAF/NASA/ISSMO symposium on multidisciplinary analysis and optimization. AIAA Paper AIAA-2000-4720
Jang BS, Yang YS, Jung HS, Yeun YS (2005) Managing approximation models in collaborative optimization. Struct Multidisc Optim 30(1):11–26
Kim H, Ragon S, Soremekun G, Malone B, Sobieszczanski-Sobieski J (2004) Flexible approximation model approach for bi-bevel integrated system synthesis. In: Proc. 10th AIAA/ISSMO multidisciplinary analysis and optimization conference. AIAA Paper AIAA-2004-4545
Kodiyalam S (1998) Evaluation of methods for multidisciplinary design optimization (MDO), Phase I. NASA CR 208716
Korte JJ, Weston RP, Zang TA (1997) Multidisciplinary optimization methods for preliminary design. In: AGARD interpanel (FDP+PEP) symposium “Future aerospace technology in the service of the alliance”. Paris
Liu W (2007) Application of MDO method to 7000m HOV general design. Ph.D. thesis, Shanghai Jiao Tong University (in Chinese)
Liu KL, Yao WX (2007) Low degree-of-freedom collaborative optimization of MDO. Journal of Nanjing University of Aeronautics & Astronautics 39(3):317–322. In Chinese
McAllister CD, Simpson TW, Kurtz PH, Yukish M (2002) Multidisciplinary design optimization test based on autonomous underwater vehicle design. In: Proc. 9th AIAA/ISSMO symposium on multidisciplinary analysis and optimization. AIAA Paper AIAA-2002-5630
Padula SL, Alexandrov N, Green LL (1996) MDO test suite at NASA Langley Research Center. In: Proc. 6th AIAA/NASA/ISSMO symposium on multidisciplinary analysis and optimization. AIAA Paper AIAA-1996-4028
Renaud JE, Gabrile GA (1994) Approximation in non-hierarchic system optimization. AIAA J 32(1):198–205
Roth B, Kroo I (2008) Enhanced collaborative optimization application to an analytic test problem and aircraft design. In: Proc. 12th AIAA/ISSMO multidisciplinary analysis and optimization conference. AIAA Paper AIAA-2008-5841
Sellar RS, Batill SM, Renaud JE (1996) Response surface based, concurrent subspace optimization for multidisciplinary system design. In: Proc. 34th aerospace sciences meeting and exhibit. AIAA Paper AIAA-1996-0714
Sobiesczanski-Sobieski J, Haftka RT (1996) Multidisciplinary aerospace design optimization: survey of recent developments. In: Proc. 34th aerospace sciences meeting and exhibit. AIAA Paper AIAA-1996-0711
Sobiesczanski-Sobieski J, Agte SJ, Sandusky RR (1998) Bi-level integrated system synthesis (BLISS). NASA TM 208715
Sobieszczanski-Sobieski J, Altus TD, Phillips M, Sandusky R (2002) Bi-level integrated system synthesis for concurrent and distributed processing. In: Proc. 9th AIAA/ISSMO symposium on multidisciplinary analysis and optimization. AIAA Paper AIAA-2002-5409
Sobieski IP, Kroo IM (1996) Aircraft design using collaborative optimization. In: Proc. 34th AIAA aerospace sciences meeting and exhibit. AIAA Paper AIAA-1996-0715
Sobieski IP, Manning VM, Kroo IM (1998) Response surface estimation and refinement in collaborative optimization. In: Proc. 7th AIAA/USAF/NASA/ISSMO symposium on multidisciplinary analysis and optimization. AIAA Paper AIAA-1998-4753
Tedford NP, Martins JRRA (2006a) Comparison of MDO architectures within a universal framework. In: Proc. 47th AIAA/ASME/ ASCE/AHS/ASC structures, structural dynamics, and materials conference. AIAA Paper AIAA-2006-1617
Tedford NP, Martins JRRA (2006b) On the common structure of MDO problems: a comparison of architectures. In: Proc. 11th AIAA/ISSMO multidisciplinary analysis and optimization conference. AIAA Paper AIAA-2006-7080
Yu XQ, Xue F, Mu XF, Yao WX, Liu KL, Huang AF (2003) Improving robustness of the collaborative optimization using genetic algorithms. China Mech Eng 14(21):1808–1811 (in Chinese)
Zhang XP (2006) A Study on Integrated aerodynamic/structural design of joined-wing aircraft. Master thesis, Nanjing University of Aeronautics and Astronautics (in Chinese)
Zhao M, Cui WC (2007) Application of optimal Latin hypercube and radial basis function network to collaborative optimization. J Marine Sci Appl 6(3):24–32
Acknowledgements
The authors would like to thank Prof. Yu Xiongqing from Nanjing University of Aeronautics and Astronautics in China for providing the source code of electronic packaging, and thank Dr. Hongman Kim from Phoenix Integration, Inc. for his helpful discussion and suggestion about BLISS-2000. Critical comments from reviewers are also greatly appreciated.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Zhao, M., Cui, W. On the development of Bi-Level Integrated System Collaborative Optimization. Struct Multidisc Optim 43, 73–84 (2011). https://doi.org/10.1007/s00158-010-0536-4
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00158-010-0536-4