
Abstract
In this paper, the He–Elzaki transform method (HEM) is proposed. The method is formulated by combining He’s variation iteration method and the modified Laplace transform, known as the Elzaki integral transform. This method is designed to solve the time-fractional telegraph equation that arises in electromagnetics. The Caputo sense is used to describe fractional derivatives. One of the advantages of this method is that the computation of the Lagrange multiplier is not necessarily required through the convolution theorem or integration in recurrence relations. Additionally, to reduce nonlinear computational terms, He’s polynomial is determined using the homotopy perturbation method. The proposed method is applied to several examples of nonlinear fractional telegraph equations. The results obtained from these examples demonstrate that the proposed method is an efficient technique that facilitates the process of solving time-fractional differential equations.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Differential equations of fractional orders can be used to simulate phenomena in various scientific disciplines, thereby enhancing our understanding of natural phenomena across a wide range of fields, including engineering, electronics, biology, business, computer science, and physics. Throughout history, notable scientists such as Bernoulli, Liouville, Euler, L’Hopital, and Wallis have made substantial contributions to the development of fractional calculus, furthering our understanding of these equations. However, due to the inherent challenges in finding exact and analytical solutions for fractional differential equations, numerical methods are employed to study and analyze these solutions.
Since its invention by Heaviside in 1880, telegraph equations have been used to solve a wide variety of issues in numerous scientific areas. In addition to their applications in the study of wave propagation in cable transmission, wave phenomena, and electric signals, the proposed equation is also applied in the fields of telephone lines, wireless signals, and radio frequency [1].
The distance and time of electric transmissions with current and voltage are described by the telegraph equation [1]. Through the use of several numerical and analytical techniques, including the Adomian decomposition method, telegraph equations of fractional orders were solved (ADM) in [2], He’s homotopy perturbation method (HPM) [3], Laplace transforms combined with HPM [4], and the reduced differential transform technique [5]. Chebyshev tau method is used to solve the hyperbolic telegraph equation [6]. The variation iteration method is used to find the solution to the proposed problem and obtained the same result as obtained by (ADM) with fewer computations [7], explicit finite difference method [8], and the modified Adomian decomposition method (MADM) [9]. A novel enhanced variation iteration Laplace transform approach is applied to time-fractional differential equations [10].
The homotopy perturbation method (HPM) is another important semi-analytical technique for solving differential equations [11,12,13]. It is an efficient technique for studying various types of nonlinear functional equations. Volterra–Fredholm nonlinear systems were solved by HPM [14], also hyperbolic PDEs [15], and Zakharov–Kuznetsov [16], and a system of nonlinear differential equations [17] are solved by HPM.
The solutions to both integer- and fractional-order linear and nonlinear differential equations have been extensively described over the past decade. Methods such as Laplace Adomian decomposition method, Laplace homotopy perturbation method, and more recently, the Elzaki homotopy transformation perturbation method have been employed to solve various problems, including a family of differential equations [18], spatial diffusion of biological population [19], nonlinear oscillators [20], and system of linear and nonlinear PDEs of fractional orders [21]. The solution of the fractional telegraph equation is examined in this study using the Elzaki transform together with a novel variation iteration method and homotopy perturbation method. The fractional reduced differential transform technique is utilized to solve differential equations with fractional and integer orders in [22,23,24,25,26]. The Adomian decomposition Sumudu transform approach is employed to solve differential equations with fractional and integer orders in [27,28,29].
Elzaki integral transform is a modification of the Laplace and Sumudu transforms which was invented by Tarig [30], and Elzaki transformation is an efficient and powerful technique that has found the exact solutions to several differential equations which cannot be solved by Sumudu transform [31]. Elzaki integral equation is a powerful and efficient technique that has been used to solve many differential equations of integer and fractional orders; see [32,33,34,35,36,37,38,39].
The objective of this paper is to expand the applications of HEM and illustrate the efficiency of the proposed method. Therefore, we consider the fractional telegraph equation
Nanoelectromechanical systems have a significant impact on detection and actuation. However, the design of nanoelectromechanical processes is adversely affected by nonlinearity. Noise, response instability, and bifurcation phenomena are characteristics of the complicated behaviors of nonlinear vibration systems. Consequently, it is crucial to manage nonlinear vibrations in nanoelectromechanical systems to produce stable vibrations.
By differentiating Eq. (1) with respect to time t and Eq. (2) with respect to position x, and subsequently solving the resulting system, we obtain the following equations:
Differentiate Eq. (1) concerning t and (2) concerning x, then solving the system, the following equation is obtained as
Assume that \(\varepsilon =\frac{L}{M}\epsilon =\frac{J}{K}\delta ^{2}=\frac{1}{MK}\) substituting these values in the above equation, we obtain
Equation (3) is a telegraph equation which arises in electromagnetic waves.
2 Preliminaries
In this section, we introduce some definitions and properties of fractional calculus and the Elzaki transform, which are used in this article.
Definition 2.1
[40] A real-valued function \(\textrm{g}\left( \textrm{y} \right) \mathrm {, y>0}\) is belong to the space \(\textrm{C}_{\mathrm {\sigma }}\mathrm {, \sigma \in R}\) if there exists at least a real number \(\mathrm {d>\sigma ,}\) such that \(\textrm{g}\left( \textrm{y} \right) \mathrm {=}\textrm{y}^{\textrm{d}}\textrm{g}_{\textrm{1}}\mathrm {(y)}\) where \(\textrm{g}_{\textrm{1}}\mathrm {(y)\in }\textrm{C}\left( \mathrm {0,\infty } \right) \) and it is said to be in the space \(\textrm{C}_{\mathrm {\sigma }}^{\textrm{n}}\) if\({\textrm{ g}}^{\textrm{n}}\mathrm {\in }R_{\mathrm {\sigma }}\mathrm {, n\in N}\)
Definition 2.2
[41] The function \(\textrm{f}\left( \textrm{u} \right) \)is called Riemann–Liouville fractional integral of order \(\alpha >0\) if it defines as:
In particular, \(J^{0}f\left( w \right) =f\left( w \right) \)
For \(\mathrm {\theta \ge 0}\) and\(\mathrm { \vartheta \ge -1}\), some properties of the operator \(\textrm{J}^{\mathrm {\alpha }}\)
-
1.
\(J^{\alpha }J^{\theta }f\left( w \right) =J^{\alpha +\theta }f\left( w \right) \)
-
2.
\(J^{\alpha }J^{\theta }f\left( w \right) =J^{\theta }J^{\alpha }f\left( w \right) \)
-
3.
\(J^{\alpha }y^{\vartheta }=\frac{\varGamma \left( \vartheta +1 \right) }{\varGamma \left( \alpha +\vartheta +1 \right) }y^{\alpha +\vartheta }.\)
Definition 2.3
[41] The function \(\mathrm {f\in }\textrm{C}_{\mathrm {-1}}^{\textrm{n}}\mathrm {, n\in N}\), is called Caputo fractional derivative if it defines as
Definition 2.1
[42] The Elzaki transform of the function \(\mathrm {f(u)}\) is defined as:
The Laplace transform of the Caputo fractional derivative has the form
where \(G\left( s \right) \) represents the Laplace transform of\( g\left( x \right) \)
The Elzaki form of the Caputo operators is as follows [33]:
3 He–Elzaki method (HEM)
To obtain the constrained recurrence relation needed to define the Lagrange multiplier, the Elzaki transform for fractional differential equations is employed in this letter. The integral computation and the convolution terms are avoided using this method. Elzaki transform’s constraints on nonlinear components require the usage of the HPM to reduce calculations. The novel and altered strategy are built up as follows:
The Lagrange multiplier is identified by multiplying the Elzaki transform of the proposed differential equation by the Lagrange multiplier, which is performed using a variational approach. The suggested problem’s nonlinear terms are calculated using the Adomain polynomial, and the series solution is then discovered using the well-known homotopy perturbation approach.
To clarify the implementation of our modified method, consider the following nonlinear equation.
Applying the Elzaki transform, we have
Now, we take the Lagrange multiplier\( \mu (v)\)
Here, we can have the following recurrence relation:
The recurrence relation reflects the modified Elzaki variant, and we use the following relation to incorporate the Lagrange multiplier \(\mu \left( v \right) \) while applying the optimal condition
Now, taking the inverse of Elzaki transform of Eq. (7) to achieve the solution of Eq. (3)
where \(A_{j}\) represents the Adomian polynomial as follows:
Finally, to investigate the series approximate solution the homotopy perturbation method is considered by equating the powers of the embedded parameter\( p\)
4 Homotopy perturbation method (HPM)
In this section, we study the concept of HPM for the solution to our problem. Consider the following differential equation
where m represents a source term, R and N represent linear and nonlinear operators, respectively, and w represents the solution function.
According to Homtopy theory\( H\left( u,p \right) \), \(H\left( u,p \right) :R\times \left[ 0,1 \right] \rightarrow R\) that satisfies the equation
Using simple calculations, we obtain
where the embedding parameter \(p\in [0,1]\), and \(u_{0}\) represents the initial approximation of the solution of Eq. (3); further, w is the homotopy function with \(R\left( w_{0} \right) =m\).
Thus, w can be written as:
Equating the powers of p can be written as follows:
Finally, as p approach to 1 the approximate solution of (3) is
5 Applications
The effectiveness and precision of the novel method for solving the telegraph equation are verified using numerical patterns. We use several examples to explain our modification approach to the suggested problem for this aim.
Example 5.1
Consider the following nonlinear telegraph equation of fractional order \(0<\alpha \le 1\)
with the initial conditions\( z\left( x,0 \right) =x-x^{2}, z_{t}\left( x,0 \right) =0\). The exact solution of the Eq. (13) when \(\alpha =1\) is
Assume that \(f\left( t,x \right) =\left( x-x^{2} \right) \left( \frac{6t^{3-2\alpha }}{\varGamma \left( 4-2\alpha \right) }+\frac{6t^{3-\alpha }}{\varGamma \left( 4-\alpha \right) }+\left( t^{3}+1 \right) \left( x-x^{2} \right) \right) +2(t^{3}+1)\).
Taking the Elzaki transform of Eq. (13)
Now, we multiply both sides of above equation by \(\mu (v)\)
The recurrence relation has the following form
Taking the variation of the above equation and using Elzaki property (5), we obtain
The variables \(\hat{z}_{j}=\hat{z}_{j}\left( x,0 \right) =\hat{Z}_{j}(x,0)\) are restricted variables, since \(\rho \hat{z}_{j}\left( x,0 \right) ={\rho \hat{Z}}_{j}\left( x,0 \right) =0\) and\( \frac{{\rho Z}_{j+1}\left( x,v \right) }{{\rho Z}_{j}\left( x,v \right) }=0\)
Therefore, the Lagrange multiplier\( \mu \left( v \right) =-v^{2\alpha }\)
Substituting the Lagrange multiplier in Eq. (14), we obtain
Applying Elzaki inverse, we get
Since\( \frac{\partial ^{\alpha }z_{j}}{\partial t^{\alpha }}=0, j=0,1,2,3\ldots \) to get He’s polynomial, we apply HPM
where\({ A}_{j}\) are the Adomian polynomials of \((z_{0}, z_{1}, z_{2}, z_{3}\ldots )\); we use (8) to calculate the Adomian polynomials:
Equating the highest powers of\( p\), and substituting the Adomian polynomials in (16), leads to
Here, the HEM solution for Eq. (13) is
In Fig. 1, graph (a) and graph (b) represent the exact solution and HEM solution of Eq. (12) at\( \alpha =1\), respectively. It is clear that the exact and HEM solutions are in a good agreement. In Fig. 2, graph (a) and graph(b) represent the HEM solution of Eq. (13) at \(\alpha =0.95\) and\( \alpha =0.90\), respectively.

Exact solution and the approximate solution of z(x, t) of Eq. (13) at \( \alpha =1\)

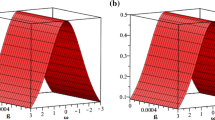
approximate solutions of z(x, t) of equation (13) at \( \alpha =0.95\) and 0.9.
Example 5.2
Consider the following nonlinear telegraph equation with fractional order \(0<\alpha \le 1\)
with the initial conditions\( z\left( x,0 \right) =\sin \left( x \right) , z_{t}\left( x,0 \right) =0\). The exact solution of the Eq. (17) when \(\alpha =1\) is
Assume that \(f\left( t,x \right) =\mathrm {sin?}(x)\left( \frac{6t^{3-2\alpha }}{\varGamma \left( 4-2\alpha \right) }+\frac{6t^{3-\alpha }}{\varGamma \left( 4-\alpha \right) }+\left( t^{6}-2t^{3}+1 \right) \mathrm {sin?}(x)+t^{3}-1 \right) \).
Taking the Elzaki transform of Eq. (17)
Now, we multiply both sides of above equation by \(\mu (v)\)
The recurrence relation has the following form
Taking the variation of the above equation and using Elzaki property (5), we obtain
The variables \(\hat{z}_{j}=\hat{z}_{j}\left( x,0 \right) =\hat{Z}_{j}(x,0)\) are restricted variables, since \(\rho \hat{z}_{j}\left( x,0 \right) ={\rho \hat{Z}}_{j}\left( x,0 \right) =0\) and \( \frac{{\rho Z}_{j+1}\left( x,v \right) }{{\rho Z}_{j}\left( x,v \right) }=0\)
Therefore, the Lagrange multiplier\( \mu \left( v \right) =-v^{2\alpha }\)
Substituting the Lagrange multiplier in Eq. (18), we obtain
Applying Elzaki inverse, we get
Since\( \frac{\partial ^{\alpha }z_{j}}{\partial t^{\alpha }}=0 j=0,1,2,3\ldots \) to get He’s polynomial, we apply HPM
where\({ A}_{j}\) and \(B_{j}\)are the Adomian polynomials of \((z_{0}, z_{1}, z_{2}, z_{3}\ldots )\); we use (8) to calculate the Adomian polynomials:
Equating the highest powers of\( p\), and substituting the Adomian polynomials in (16) leads
Here, the HEM solution for Eq. (17) is

Exact solution and the approximate solution z(x, t) of Eq. (17) at \( \alpha =1\)

Approximate solutions of z(x, t) of Eq. (17) at\( \alpha =0.9\) and 0.8
In Fig. 3, graph (a) and graph (b) represent the exact solution and HEM solution of Eq. (13) at\( \alpha =1\), respectively. It is clear that the exact and HEM solutions are in a good agreement. In Fig. 2, graph (a) and graph(b) represent the HEM solution of Eq. (13) at \(\alpha =0.9\) and\( \alpha =0.8\), respectively.
6 Conclusion
To study the solution of time-fractional telegraph equations, a novel computational technique called Elzaki integral transform is merged with He’s variation iteration method in this paper. The fractional derivatives are defined in the Caputo sense. The suggested method was applied to a new model with one dimension, and the exact and approximate solutions were found. The beauty of the innovative procedure is that one needs to depend on neither the integration nor the convolution theorem in recurrence relation to define the Lagrange multiplier. Convolution and integral computation terms are avoided by using this method. The HPM and Adomian polynomial is used to reduce calculations due to the Elzaki transform’s restrictions on nonlinear components. Finally, we found that the He–Elzaki transform method (HEM), which has been successfully implemented in solving the time-fractional telegraph model, is an efficient method for solving differential equations of integer and fractional orders.
NOMENCLATURE | |
|---|---|
\(\textrm{N}\) | Neutral number |
\(\mu \left( . \right) \) | Lagrange multiplier |
\(A_{j}\) | Adomian polynomials |
\(E\left[ . \right] \) | Elzaki transform |
\(\alpha \) | Fractional-order derivative |
p | Embedding parameter |
t | Time parameter |
Availability of data and materials
The data that were used in this work are included in the paper.
References
Khan, H., Shah, R., Kumam, P., Baleanu, D., Arif, M.: An efficient analytical technique, for the solution of fractional-order telegraph equations. Mathematics 7(5), 1–19 (2019). https://doi.org/10.3390/math7050426
Abdou, M.A.: Adomian decomposition method for solving the telegraph equation in charged particle transport. J. Quant. Spectrosc. Radiat. Transf. 95(3), 407–414 (2005). https://doi.org/10.1016/j.jqsrt.2004.08.045
Yıldırım, A.: He’s homotopy perturbation method for solving the space- and time-fractional telegraph equations. Int. J. Comput. Math. 87(13), 2998–3006 (2010). https://doi.org/10.1080/00207160902874653
Alawad, F.A., Yousif, E.A., Arbab, A.I.: A new technique of Laplace variational iteration method for solving space-time fractional telegraph equations. Int. J. Differ. Equ. (2013). https://doi.org/10.1155/2013/256593
Srivastava, V.K., Awasthi, M.K., Chaurasia, R.K., Tamsir, M.: The telegraph equation and its solution by reduced differential transform method. Model. Simul. Eng. (2013). https://doi.org/10.1155/2013/746351
Saadatmandi, A., Dehghan, M.: Numerical solution of hyperbolic telegraph equation using the Chebyshev tau method. Numer. Methods Partial Differ. Equ. 26(1), 239–252 (2010). https://doi.org/10.1002/num.20442
Sevimlican, A.: An approximation to solution of space and time fractional telegraph equations by he’s variational iteration method. Math. Probl. Eng. (2010). https://doi.org/10.1155/2010/290631
Abdulazeez, S.T., Modanli, M.: Solutions of fractional order pseudo-hyperbolic telegraph partial differential equations using finite difference method. Alexandria Eng. J. 61(12), 12443–12451 (2022)
Al-badrani, H., Saleh, S., Bakodah, H.O., Al-Mazmumy, M.: Numerical solution for nonlinear telegraph equation by modified Adomian decomposition method. Nonlinear Anal. Differ. Equ. 4(5), 243–257 (2016)
Mohamed, M.Z., Elzaki, T.M., Algolam, M.S., Abd Elmohmoud, E.M., Hamza, A.E.: New modified variational iteration Laplace transform method compares Laplace adomian decomposition method for solution time-partial fractional differential equations. J. Appl. Math. 1–10, 2021 (2021)
Kumar, M., Saxena, A.S.: New iterative method for solving higher order KDV equations, pp. 246–257
Javidi, M., Ahmad, B.: Numerical solution of fourth-order time-fractional partial differential equations with variable coefficients. J. Appl. Anal. Comput. 5(1), 52–63 (2015). https://doi.org/10.11948/2015005
Shou, D.H.: The homotopy perturbation method for nonlinear oscillators. Comput. Math. with Appl. 58(11–12), 2456–2459 (2009). https://doi.org/10.1016/j.camwa.2009.03.034
Biazar, J., Ghanbari, B., Porshokouhi, M.G., Porshokouhi, M.G.: He’s homotopy perturbation method: a strongly promising method for solving non-linear systems of the mixed Volterra-Fredholm integral equations. Comput. Math. Appl. 61(4), 1016–1023 (2011). https://doi.org/10.1016/j.camwa.2010.12.051
Biazar, J., Ghazvini, H.: Homotopy perturbation method for solving hyperbolic partial differential equations. Comput. Math. Appl. 56(2), 453–458 (2008). https://doi.org/10.1016/j.camwa.2007.10.032
Biazar, J., Badpeima, F., Azimi, F.: Application of the homotopy perturbation method to Zakharov–Kuznetsov equations. Comput. Math. Appl. 58(11), 2391–2394 (2009). https://doi.org/10.1016/j.camwa.2009.03.102
Elzaki, T.M., Biazar, J.: Homotopy perturbation method and Elzaki transform for solving system of nonlinear partial differential equations. World Appl. Sci. J. 24(7), 944–948 (2013). https://doi.org/10.5829/idosi.wasj.2013.24.07.1041
Loyinmi, A.C., Akinfe, T.K.: Exact solutions to the family of Fisher’s reaction-diffusion equation using Elzaki homotopy transformation perturbation method. Eng. Reports 2(2), 1–32 (2020). https://doi.org/10.1002/eng2.12084
Ul Rahman, J., Lu, D., Suleman, M., He, J.H., Ramzan, M.: HE-Elzaki method for spatial diffusion of biological population. Fractals (2019). https://doi.org/10.1142/S0218348X19500695
Anjum, N., Suleman, M., Lu, D., Hes, J.H., Ramzan, M.: Numerical iteration for nonlinear oscillators by Elzaki transform. J. Low Freq. Noise Vib. Act. Control (2019). https://doi.org/10.1177/1461348419873470
Lu, D., Suleman, M., He, J.H., Farooq, U., Noeiaghdam, S., Chandio, F.A.: Elzaki projected differential transform method for fractional order system of linear and nonlinear fractional partial differential equation. Fractals (2018). https://doi.org/10.1142/S0218348X1850041X
Patel, T., Patel, H., Meher, R.: Analytical study of atmospheric internal waves model with fractional approach. J. Ocean Eng. Sci. (2022)
Patel, T., Patel, H.: An analytical approach to solve the fractional-order (2\(+\) 1)-dimensional Wu-Zhang equation. Math. Methods Appl. Sci. 46(1), 479–489 (2023)
Tandel, P., Patel, H., Patel, T.: Tsunami wave propagation model: a fractional approach. J. Ocean Eng. Sci. 7(6), 509–520 (2022)
Patel, H., Patel, T., Pandit, D.: An efficient technique for solving fractional-order diffusion equations arising in oil pollution. J. Ocean Eng. Sci. 8(3), 217–225 (2023)
Patel, H., Patel, T.: Analytical study of instability phenomenon with and without inclination in homogeneous and heterogeneous porous media using fractional approach. J. Porous Media 25(9) (2022)
Patel, T., Meher, R.: A study on convective-radial fins with temperature-dependent thermal conductivity and internal heat generation. Nonlinear Eng. 8(1), 145–156 (2019)
Patel, T., Meher, R.: Thermal Analysis of porous fin with uniform magnetic field using Adomian decomposition Sumudu transform method. Nonlinear Eng. 6(3), 191–200 (2017)
Patel, T., Meher, R.: Adomian decomposition Sumudu transform method for convective fin with temperature-dependent internal heat generation and thermal conductivity of fractional order energy balance equation. Int. J. Appl. Comput. Math. 3, 1879–1895 (2017)
Elzaki, T.M., Ishag, A.A.: Solution of telegraph equation by Elzaki-Laplace transform. African J. Eng. Technol. 2(1), 1–7 (2022). https://doi.org/10.47959/AJET.2021.1.1.8
Hilal, E.M.A.: Elzaki and Sumudu transforms for solving some differential equations. Global J. Pure Appl. Math. 8(2), 167–173 (2012)
Ige, O.E., Oderinu, R.A., Elzaki, T.M.: Adomian polynomial and Elzaki transform method for solving sine-gordon equations. IAENG Int. J. Appl. Math. 49(3), 1–7 (2019)
Murad, M.A.S.: Modified integral equation combined with the decomposition method for time fractional differential equations with variable coefficients. Appl. Math. J. Chinese Univ. 37(3), 404–414 (2022)
Ziane, D., Cherif, M.H.: Resolution of nonlinear partial differential equations by Elzaki transform decomposition method laboratory of mathematics and its applications. J. Approx. Theory Appl. Math. 5, 17–30 (2015)
Malo, D.H., Rogash Younis Masiha, M.A.S., Murad, S.T.A.: A new computational method based on integral transform for solving linear and nonlinear fractional systems. J. Mat. MANTIK 7(1), 9–19 (2021)
Shawagfeh, N.: Decomposition method for fractional partial differential equations. (2017) https://doi.org/10.5829/idosi.wasj.2019.18.24
Suleman, M., Elzaki, T., Wu, Q., Anjum, N., Rahman, J.U.: New application of Elzaki projected differential transform method. J. Comput. Theor. Nanosci. 14(1), 631–639 (2017)
Suleman, M., Elzaki, T.M., Rahman, J.U., Wu, Q.: A novel technique to solve space and time fractional telegraph equation. J. Comput. Theor. Nanosci. 13(3), 1536–1545 (2016)
Elzaki, T.M., Alamri, A.S.: Note on new homotopy perturbation method for solving non-linear integral equations. J. Math. Comput. Sci. 6(1), 149–155 (2016)
Slonevskii, R.V., Stolyarchuk, R.R.: Rational-fractional methods for solving stiff systems of differential equations. J. Math. Sci. 150(5), 2434–2438 (2008). https://doi.org/10.1007/s10958-008-0141-x
Prakash, A., Verma, V.: Numerical method for fractional model of Newell–Whitehead–Segel equation. Front. Phys. 7(FEB), 1–10 (2019). https://doi.org/10.3389/fphy.2019.00015
Elzaki, T.M.: The new integral transform Elzaki transform. Global J. Pure Appl. Math. 7(1), 57–64 (2011)
Acknowledgements
Not applicable.
Funding
The authors have received no direct funding or support for this work.
Author information
Authors and Affiliations
Contributions
All authors have contributed equally.
Corresponding author
Ethics declarations
Conflict of interest
There are no conflicts of interest among the authors of this paper.
Ethics approval and consent to participate
This work was completed under ethics and consent.
Consent for publication
All authors agreed to the publication of the paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Modanli, M., Murad, M.A.S. & Abdulazeez, S.T. A new computational method-based integral transform for solving time-fractional equation arises in electromagnetic waves. Z. Angew. Math. Phys. 74, 186 (2023). https://doi.org/10.1007/s00033-023-02076-9
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00033-023-02076-9