
Abstract
In this paper, the symmetry group method is used to obtain similarity reductions for generalized symmetric coupled Burgers-type equations. Two different cases for similarity reductions yield, therefore two different ordinary differential equations are solved. Many new different traveling wave solutions in the form of rational wave solutions, kink soliton, and periodic wave solutions are given with their Illustration graphics. The obtained solutions are novel and cover other obtained solutions in the literature. Finally, some graphs for the obtained shock and kink wave solutions will given to illustrate the wave propagation behavior.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
One of the most famous equations in mathematical physics is Burger’s equation. This equation yields because of merging both nonlinear wave motion with linear diffusion. The existence of viscous terms helps control wave-breaking, and smooth out shock discontinuities so that, we know that the obtained solutions will behave well and smoothly. Additionally, in the inviscid limit, as the diffusion term becomes very small, the smooth viscous solutions converge non-uniformly to the appropriate discontinuous shock wave. Many applications for Burger’s equations and their generalization can be found in weather problems, boundary layer behavior, acoustic transmission, shock weave formation, mass transport turbulence, and traffic flow [1,2,3,4,5]. Moreover, coupled Burger’s equations are one of the very important classes of systems of nonlinear parabolic and hyperbolic partial differential equations which models basic flow equations describing unsteady transport problems.
In this paper, we are going to use symmetry group analysis to investigate invariant transformations and exact solutions for one of those generalized Burgers systems; namely, the symmetric coupled Burgers equations (SCBE) [1,2,3]
where \(\phi =\phi (x,t)\) , \(\psi =\psi (x,t)\). The SCBE (1) was first discussed by Foursov in [1] as one of the symmetric integrable coupled Burgers type equations. Also, Wazwaz in [3] studied the SCBE system by using Hirota’s bilinear method to find its integrability property, and both kink and singular kink solutions were obtained.
The motivation of our work is to reduce system (1) by the symmetry method and obtain more novel solutions for it that also cover other solutions obtained before [1,2,3]. Moreover, some graphs for the obtained shock and kink wave solutions will given to illustrate the wave propagation behavior.
Methodology and Fundamental equations
Recently, many new methodologies constructed to solve nonlinear partial differential equations like Hirota’s bilinear method, Bäcklund transformation method, the Riccati equation method, the sine-Gordon equation method, and direct similarity reduction method, the symmetry reduction method etc. [6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23,24,25,26,27,28,29,30,31,32,33,34,35,36,37,38].
In this section we are going to apply the symmetry method to reduce the SCBE as follows [4, 5, 20, 22, 25], and [29]:
1- The SCBE system can be written in the form,
2- To find the invariant transformations of the SCBE system, put the following symmetry operators
where \(A=A(x,t,\phi ,\psi )\), \(B=B(x,t,\phi ,\psi )\), \(C=C(x,t,\phi ,\psi )\) , and \(E=E(x,t,\phi ,\psi )\ \)are the infinitesimals to be found later.
3- To Calculate the Frèchet derivatives \(F_{1}(L_{1}\), \(\phi \), \(\psi ,\Phi ,\Psi )\) of \(L_{1}(\phi ,\psi )\) and \(F_{2}(L_{2}\), \(\phi \), \(\psi ,\Phi ,\Psi )\) of \(L_{2}(\phi ,\psi )\) in directions of \(\Phi \) and \(\Psi \), and replacing \(\Phi \) and \(\Psi \) in \(F_{1}\)and \(F_{2}\) by \( S_{1}(\phi \), \(\psi )\) and \(S_{2}(\phi \), \(\psi )\) respectively, we get
Substitute from (3) into Eqs. (4) and (5), then collect the coefficients of the derivatives of \(\phi \) and \(\psi \) in Eqs. (4) and (5) and equating it by zero, we get the following partial differential system
By solving the above partial differential system, we get
where \(c_{1},c_{2}\) and \(c_{3}\) are arbitrary constants, h(x) is an arbitrary function of x. Therefore, the Lie algebra generators of the SCBE system are given by
By comparison with [5], the SCBE system is integrable if the symmetries obtained are of third (if \(h(x)=0\)) and fourth order symmetries, it means that the generator \(\chi _{h}\) should be zero. Therefore, \(h(x)=0\) and \(\phi =\psi \).
Further, from the infinitesimal symmetries given by Eqs. (8), the following possibilities exist for the reduction of system (1)
-
(i)
\(c_{1}\ne 0,\) \(c_{2}\ne 0,\) \(c_{3}\ne 0,\ \ \)
-
(ii)
\(c_{1}=0,\) \(c_{2}\ne 0,\) \(c_{3}\ne 0.\ \)
The new independent and dependent similarity variables corresponding to cases I and II can be obtained by solving the following equation
Reductions and new solutions
In this section we are going to find the reductions of system (1) into nonlinear ordinary differential system in the independent similarity variable \(\zeta \) and the new dependent variable g
Case (i):
From Eq. (9) with conditions \(h(x)=0\) and \(\phi =\psi \)
So that, we get
Inserting Eq. (11) into (1), the SCBE is reduced to the following nonlinear single ordinary differential equation:
Assume that the solution of (12) takes the form
where \(A_{1},A_{2}\) are constants to determine it, substitute from (13) into (12) and collect the powers of \(\zeta \), then equate it by zero, an algebraic system is obtained. Solve it by Maple program, the following values are given
By inserting (14) into (13) , then using it in (11), the SCBE has the new rational solution
Case (ii)
From Eq. (9)
The associated new similarity variables are
The SCBE system is reduced to the following Ricatti equation
Integrating Eq. (18) with respect to \(\zeta ,\) we obtain
where \(c_{4}\) is an arbitrary integration constant. Equation (19) can be rewritten as
Now, Eq. (20) has the following hyperbolic and periodic wave solutions
where \(\zeta _{0}\) is an arbitrary integration constant.

The rational solution (15) with \(c_{1}=c_{2}=c_{3}=1\)

The shock wave solution (28) with \(c_{2}=1,c_{3}=c_{4}=-1,\varsigma _{0}=0\)

Kink wave solution (29) with \(c_{2}=1,c_{3}=c_{4}=-1\) and \(\varsigma _{0}=0\)

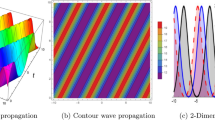
The periodic wave solution (30) with \( c_{2}=c_{4}=1,c_{3}=-1\) and \(\varsigma _{0}=0\)

The periodic wave solution (31) with \(c_{2}=c_{4}=1,c_{3}=-1\) and \(\varsigma _{0}=0\)

Plot of the shock wave solution (32) with \( c_{2}=c_{3}=1\) and \(\varsigma _{0}=0\)

Plot of the dark kink wave solution (33) with \(c_{2}=c_{3}=1\) and \(\varsigma _{0}=0\)

Plot of the traveling wave solution (34) with \( c_{2}=c_{3}=1\) and \(\varsigma _{0}=0\)
By inserting Eqs. (21)–(27) into (17) , the following Kink soliton solutions and periodic wave solutions are constructed for the Coupled symmetric Burgers-Type Equations
Results and discussion
Burgers’ equation is yield because of merging both nonlinear wave motion with linear diffusion. Existence of viscous term helps control the wave-breaking, smooth out shock discontinuities so that, we know that the obtained will be well-behaved and smooth solution. Additionally, in the inviscid limit, as the diffusion term becomes very small, the smooth viscous solutions converge non-uniformly to the appropriate discontinuous shock wave. In the following are some graphs for the obtained solutions (28)–(34) to illustrate the shock and kink waves behavior for the obtained solutions.(See Figs. 1, 2, 3, 4, 5, 6, 7, and 8)
The above figures illustrate both discontinuously and smoothly wave propagation for the obtained shock, kink, and periodic wave solutions .
Conclusion
In this paper, the SCBE is studied by using the symmetry method due to Steinberg. The obtained symmetries are infinite symmetries, but according to Foursov in [1], the SCBE system is integrable and symmetric if it has a third and a fourth-order symmetry; therefore, \(h(x)=0\) and \(\phi \)=\(\psi \). After that, the SCBE under two different cases is transformed to only one reduced nonlinear ordinary differential equation. By obtaining solutions for the reduced differential equations, new exact solutions for the SCBE system are obtained. Furthermore, the graphs for the obtained shock, kink, and periodic wave solutions illustrate both discontinuously and smoothly wave propagation. Finally, we could conclude that the obtained solutions for the SCBE system are new and cover other solutions obtained before [3].
Data Availibility Statement
There is no data for this manuscript.
References
Foursov, M.V.: On integrable coupled Burgers-type equations. Phys. Lett. A. 272, 57–64 (2000). https://doi.org/10.1016/S0375-9601(00)00380-7
Khater, A.H., Temsah, R.S., Hassan, M.M.: A Chebyshev spectral collocation method for solving Burgers’-type equations. J. Comput. Appl. Math. 222, 333–350 (2008). https://doi.org/10.1016/J.CAM.2007.11.007
Wazwaz, A.M.: Multiple kink solutions and multiple singular kink solutions for two systems of coupled Burgers-type equations. Commun. Nonlinear Sci. Numer. Simul. 14, 2962–2970 (2009). https://doi.org/10.1016/J.CNSNS.2008.12.018
Moussa, M.H.M., Omar, R.A.K., El-Shiekh, R.M., El-Melegy, H.R.: Nonequivalent similarity reductions and exact solutions for coupled burgers-type equations. Commun. Theor. Phys. 57, 1 (2012). https://doi.org/10.1088/0253-6102/57/1/01
El-Sayed, M.F., Moatimid, G.M., Moussa, M.H.M., El-Shiekh, R.M., El-Satar, A.A.: Symmetry group analysis and similarity solutions for the (2+1)-dimensional coupled Burger’s system. Math. Methods Appl. Sci. 37, 1113–1120 (2014). https://doi.org/10.1002/mma.2870
Wang, G., Wazwaz, A.M.: On the modified Gardner type equation and its time fractional form. Chaos, Solitons & Fractals 155, 111694 (2022). https://doi.org/10.1016/J.CHAOS.2021.111694
Wang, G., Wazwaz, A.-M.: A New (3+1)-Dimensional KDV equation and MKDV equation with their corresponding fractional forms. FRACTALS (fractals) 30, 1–8 (2022). https://doi.org/10.1142/S0218348X22500815
Wang, G.: A new (3 + 1)-dimensional Schrödinger equation: derivation, soliton solutions and conservation laws. Nonlinear Dyn. 104, 1595–1602 (2021). https://doi.org/10.1007/S11071-021-06359-6
Wang, G.: Symmetry analysis. Anal. Solutions Conservation Laws of a Generalized KdV-Burgers-Kuramoto Equ. Fract. Version 29, 2150101 (2021). https://doi.org/10.1142/S0218348X21501012
Wang, G.: A novel (3+1)-dimensional sine-Gorden and a sinh-Gorden equation: Derivation, symmetries and conservation laws. Appl. Math. Lett. 113, 106768 (2021). https://doi.org/10.1016/J.AML.2020.106768
Wang, G., Yang, K., Gu, H., Guan, F., Kara, A.H.: A (2+1)-dimensional sine-Gordon and sinh-Gordon equations with symmetries and kink wave solutions. Nucl. Phys. B. 953, 114956 (2020). https://doi.org/10.1016/J.NUCLPHYSB.2020.114956
Wang, T.-Y., Zhou, Q., Liu, W.-J.: Soliton fusion and fission for the high-order coupled nonlinear Schrödinger system in fiber lasers. Chinese Phys. B. 31, 020501 (2022). https://doi.org/10.1088/1674-1056/AC2D22
Ma, G., Zhou, Q., Yu, W., Biswas, A., Liu, W.: Stable transmission characteristics of double-hump solitons for the coupled Manakov equations in fiber lasers. Nonlinear Dyn. 106, 2509–2514 (2021). https://doi.org/10.1007/S11071-021-06919-W/FIGURES/4
Wang, H., Zhou, Q., Biswas, A., Liu, W.: Localized waves and mixed interaction solutions with dynamical analysis to the Gross-Pitaevskii equation in the Bose-Einstein condensate. Nonlinear Dyn. 106, 841–854 (2021). https://doi.org/10.1007/S11071-021-06851-Z/FIGURES/8
Wang, L., Luan, Z., Zhou, Q., Biswas, A., Alzahrani, A.K., Liu, W.: Bright soliton solutions of the (2+1)-dimensional generalized coupled nonlinear Schrödinger equation with the four-wave mixing term. Nonlinear Dyn. 104, 2613–2620 (2021). https://doi.org/10.1007/S11071-021-06411-5/FIGURES/3
Yan, Y.-Y., Liu, W.-J.: Soliton Rectangular Pulses and Bound States in a Dissipative System Modeled by the Variable-Coefficients Complex Cubic-Quintic Ginzburg-Landau Equation. Chinese Phys. Lett. 38, 094201 (2021). https://doi.org/10.1088/0256-307X/38/9/094201
Wang, L.-L., Liu, W.-J.: Stable soliton propagation in a coupled (2 + 1) dimensional Ginzburg-Landau system. Chinese Phys. B. 29, 070502 (2020). https://doi.org/10.1088/1674-1056/AB90EA
Ma, G., Zhao, J., Zhou, Q., Biswas, A., Liu, W.: Soliton interaction control through dispersion and nonlinear effects for the fifth-order nonlinear Schrödinger equation. Nonlinear Dyn. 106, 2479–2484 (2021). https://doi.org/10.1007/S11071-021-06915-0/FIGURES/3
Liu, X., Zhang, H., Liu, W.: The dynamic characteristics of pure-quartic solitons and soliton molecules. Appl. Math. Model. 102, 305–312 (2022). https://doi.org/10.1016/J.APM.2021.09.042
Moussa, M.H.M., el Shikh, R.M.: Similarity Reduction and similarity solutions of Zabolotskay-Khoklov equation with a dissipative term via symmetry method. Phys. A Stat. Mech. its Appl. 371(2), 325–335 (2006)
Moussa, M.H.M., el Shikh, R.M.: Auto-Bäcklund transformation and similarity reductions to the variable coefficients variant Boussinesq system. Phys. Lett. Sect. A Gen. At. Solid State Phys. 372(9), 1429–1434 (2008)
Moussa, M.H.M., El-Shiekh, R.M.: Similarity solutions for generalized variable coefficients zakharov-kuznetso equation under some integrability conditions. Commun. Theor. Phys. 54(4), 603 (2010)
Moussa, M.H.M., El-Shiekh, R.M.: Direct reduction and exact solutions for generalized variable coefficients 2D KdV equation under some integrability conditions. Commun. Theor. Phys. 55(4), 551 (2011)
El-Shiekh, R.M.: New exact solutions for the variable coefficient modified KdV equation using direct reduction method. Math. Methods Appl. Sci. 36(1), 1–4 (2013)
Moatimid, G.M., El-Shiekh, R.M., Al-Nowehy, A.-G.A.A.H.: Exact solutions for Calogero-Bogoyavlenskii-Schiff equation using symmetry method. Appl. Math. Comput. 220, 455–462 (2013)
El-Shiekh, R.M.: Direct similarity reduction and new exact solutions for the variable-coefficient kadomtsev-petviashvili equation. Z Naturforsch A. 70(6), 445–450 (2015)
El-Shiekh, R.M.: Periodic and solitary wave solutions for a generalized variable-coefficient Boiti-Leon-Pempinlli system. Comput. Math. Appl. 14(1), 783–789 (2017)
El-Shiekh, R.M.: Jacobi elliptic wave solutions for two variable coefficients cylindrical Korteweg-de Vries models arising in dusty plasmas by using direct reduction method. Comput. Math. Appl. 75(5), 1676–1684 (2018)
El-Shiekh, R.M.: New similarity solutions for the generalized variable-coefficients KdV equation by using symmetry group method. Arab J. Basic Appl. Sci. 25(2), 66–70 (2018)
El-Shiekh, R.M.: Painlevé Test, Bäcklund Transformation and Consistent Riccati Expansion Solvability for two Generalised Cylindrical Korteweg-de Vries Equations with Variable Coefficients. Z Naturforsch A. 73(3), 207–213 (2018)
El-Shiekh, R.M.: Novel solitary and shock wave solutions for the generalized variable-coefficients (2+1)-dimensional KP-Burger equation arising in dusty plasma. Chinese J. Phys. 71, 341–50 (2021)
El-Shiekh, R.M., Gaballah, M.: New rogon waves for the nonautonomous variable coefficients Schrödinger equation. Opt. Quantum Electron. 53(8), 1–12 (2021)
El-Shiekh, R.M., Gaballah, M.: New analytical solitary and periodic wave solutions for generalized variable-coefficients modified KdV equation with external-force term presenting atmospheric blocking in oceans. J. Ocean Eng. Sci. (2021). https://doi.org/10.1016/j.joes.2021.09.003
El-Shiekh, R.M.: Classes of new exact solutions for nonlinear Schr ödinger equations with variable coefficients arising in optical fiber. Results Phys. 13, 102214 (2019)
El-Shiekh, R.M., Gaballah, M.: Bright and dark optical solitons for the generalized variable coefficients nonlinear Schrödinger equation. Int. J. Nonlinear Sci. Numer. Simul. 21(7–8), 675–681 (2020)
El-Shiekh, R.M., Gaballah, M.: Solitary wave solutions for the variable-coefficient coupled nonlinear Schrödinger equations and Davey-Stewartson system using modified sine-Gordon equation method. J. Ocean Eng. Sci. 5(2), 180–185 (2020)
El-Shiekh, R.M.: Novel solitary and shock wave solutions for the generalized variable-coefficients (2+1)-dimensional KP-Burger equation arising in dusty plasma. Chinese J. Phys. 71, 341–350 (2021). https://doi.org/10.1016/J.CJPH.2021.03.006
Gaballah, M., El-Shiekh, R.M., Akinyemi, L., Rezazadeh, H.: Novel periodic and optical soliton solutions for Davey-Stewartson system by generalized Jacobi elliptic expansion method. Int. J. Nonlinear Sci. Numer. Simul. (2022). https://doi.org/10.1515/ijnsns-2021-0349
Funding
The authors have not disclosed any funding.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all authors, there is no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
El-Shiekh, R.M., Al-Nowehy, AG.A.A.H. Symmetries, Reductions and Different Types of Travelling Wave Solutions for Symmetric Coupled Burgers Equations. Int. J. Appl. Comput. Math 8, 179 (2022). https://doi.org/10.1007/s40819-022-01385-3
Accepted:
Published:
DOI: https://doi.org/10.1007/s40819-022-01385-3