
Abstract
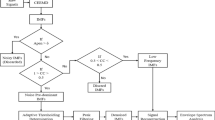
This paper analyses the vibro-acoustic characteristics of the bearing using FFT (Fast Fourier Transform), EMD (Empirical Mode Decomposition), EEMD (Ensemble EMD) and CEEMDAN (Complete EEMD with Adaptive Noise) algorithms. The main objective is to find out the best algorithm that avoids mode mixing problems while decomposing the signal and also enhance the feature extraction. It is observed that even though acoustic and vibration can be used for the fault detection in the bearing, duo follow differently interns of their statistical distributions. The feature of the bearing is acquired using acoustic and vibration sensors and analyzed using non-linear and non-stationary signal processing techniques. The statistical distribution of the data plays a major role in truly extracting the components using signal processing techniques. All the algorithms are data driven, as per the conditional events of the system, these algorithms efficiency increases or decreases. Here, the vibro-acoustic feature of the normally distributed acoustic and vibration signature are extracted effectively using CEEMDAN with least computational time and efficient signal extraction.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Fast Fourier Transform
- Empirical Mode Decomposition
- Vibration Signal
- Independent Component Analysis
- Intrinsic Mode Function
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
Bearings are the vital element in almost all industries and daily life. It has wide application and the preventive measures need to be taken care to avoid any kind of disaster. Bearing fault generally occur due improper uses i.e., harsh environmental condition and improper uses [1]. The condition of failure in bearing depends on various parameters such as bearing types, applications, environmental conditions, or any manufacturing defects [2, 3].
The condition in the bearing can be evaluated and analyzed using various sensing and signal processing techniques. As far as the fault frequencies identifications are ascertain, the feature can be acquired different types of sensors i.e., vibrations, acoustic/sound pressure monitoring, acoustic emission (AE) monitoring, ultrasonic emission, temperature monitoring, chemical analysis, laser monitoring, current monitoring and perception based monitoring etc. [4–6]. Each techniques having their significant contribution in detecting fault. AE are mostly used for qualitative analysis as compared to the quantitative analysis by ultrasonic emission, but both can be used for early fault detection. These sensing methods are costly as compared to microphone and accelerometer. Microphone with higher sensitivity can be used to detect the fault in the bearing, but it is prone to high external noise [8]. Accelerometer sensor can be used for fault analysis, but early fault cannot be detected using this technique. To infer the features of the bearing, combination of different sensing technologies can be used as an asset to discover the problem persists in the bearings.
The signal processing can be done through different techniques i.e., Fast Fourier Transform (FFT), Short Time Fourier Transform (STFT), Wavelet Transform [7] and Hilbert Huang Transform (HHT) [8, 9], EMD, EEMD, CEEMDAN [10, 11] and Variational Mode Decomposition (VMD) [12]. FFT has higher extraction efficiency than that of all other algorithms, but, it suffers from the condition of non-linearity and non-stationary. The global to local decomposition method adopted by STFT can be used to analyze the non-stationary signal, but it suffers from the non-linearity condition and lacks in multi resolution analysis. The window and the signal behavior must match statistically to extract the actual information present in the signal, which is least considered in signal analysis. Wavelet transform is better option than FFT, but the improper selection of the basis function can affect the analysis. Even though, it can be used for multi resolution signal analysis i.e., only for frequency modulated signals not for amplitude modulated. To better analyze amplitude and frequency modulated signals, EMD can be used as it behave like a dyadic filter. In literature, EMD has been used by many researchers, but EMD abide by noise and sampling rate issues. EMD is a dyadic filter, the reaction to noise and sampling inhibit its application in industrial noisy environment. The vibration signal obtained from the experimental setup is complex and are of multi tone signals. EMD fails to decompose close multi tone signals and it can be better performed using VMD [12]. VMD cannot be used for time frequency analysis and the selection of constraint bandwidth and the resulting modes cannot be decided adaptively. Here the analysis is carried out using EMD, EEMD CEEMDAN [10] techniques and their significance in fault detection of bearing to certain extent. The goal of this paper is to use non linear and non stationary signal processing technique in fault detection of bearing. EEMD uses the Gaussian noise to avoid the mode mixing problem occurred in case of EMD. The solution leads to the significant residual noise and the decomposition level increases. CEEMDAN follows the same trend of adding noise, but it has better spectral separation and the decomposition time also reduces. The mode mixing in the signal is too complex and can be carried out with statistical signal processing or wavelet packet transform followed by CEEMDAN to extract the feature of the faults [13, 14]. The performance of these signal processing techniques are tested to on vibro-acoustic signals to identify the fault in the bearing.
2 Mathematical Interpretation of Frequency
In general, the frequency of vibration of the ball bearing is estimated from the mathematical formulation and the same is compared with experimental signals to identify the nature of the fault. The defects frequencies calculated mathematically for outer race, inner race, ball spin and fundamental train frequencies are defined in (1–4).
Where for is outer race defect frequency, fir is the inner race defect frequency, fbs is the ball spin frequency, fftf is the train frequency, fs is the spin frequency of shaft, Nb is the number of balls in the bearing, Bd is the ball diameter, Pd is the pitch diameter and \( {\upvarphi }\) is the contact angle.
3 Empirical Mode Decomposition
The acoustic and vibration signal obtained from the experimental setup is complex and are of multi tone signals. EMD is used to decompose the signal into number of Intrinsic Mode Function (IMF’s). The decomposition method extract from higher to lower frequencies till the residual monotonic signal is achieved. The decomposition of the real time data x(t) is as follows,
-
1.
Sample the time domain signal \( {\text{x}}({\text{t}}), \) depending on the sample rate of acquisition device (DAQ card) and the required sample for the type of applications.
-
2.
Identify all maxima and minima for the sampled data points \( {\text{x}}({\text{n}}) \).
-
3.
Generate upper and lower envelope i.e., emin(n) and emax(n) using Cubic Spline interpolation.
-
4.
Calculate the mean m (n) for upper and lower envelope.
-
5.
m(n) = (emin (n) + emax (n))/2.
-
6.
Extract the mean from the time series and define the difference of x(n) and m(n) as d(n).
-
7.
h(n) = x(n)−m(n);
-
8.
Check the properties of h(n). If SD > 0.3, repeat steps 1–7 until the residual satisfies some stopping criterion. Standard deviation (SD) is calculated as;
$$ {\text{SD}} = \sum {\frac{{({\text{prev(h)}} - {\text{h}})^{2} }}{{{\text{prev}}({\text{h}})^{2} }}} $$ -
9.
In the end the signal x(n) can be represented as in (5).
$$ {\text{X(n)}} = \sum\limits_{{{\text{i}} = 1}}^{\text{n}} {{\text{c}}_{\text{i}} ({\text{n}}) + {\text{r}}_{\text{n}} ({\text{n}})} $$(5)Once the IMF’s are obtained, FFT is applied to the IMF’s to get the spectral components of the original decomposed signals as in (6).
$$ {\text{X(k)}} = \sum\limits_{{{\text{n}} = 0}}^{{{\text{N}} - 1}} {{\text{IMF}}({\text{n}}){\text{e}}^{{- {\text{j}}2{\uppi \text{kn}}/{\text{N}}}}} $$(6)Where N is number of discrete sample points, and is 10,000 for this experiment.
4 Experimental Setup and Methodology
The experimentations are performed to identify the acoustic and vibration feature in global and local domain using different signal processing techniques. The accelerometer sensors are mounted onto the surface of the ball bearing using stud mounting and the data are acquired from the sensors using NI USB 4432. Vibration and acoustic signals are acquired at a sampling rate of 5120 samples/sec using two different types of sensors i.e., ±50 g, ±1 g accelerometer and GRAS array microphone as shown in Fig. 1. In case of acoustic signal, acquisition preamplifier is used to amplify the signal from the microphone to enhance the strength of the signal. For, practicalities of the paper only ±50 g and GRAS array microphones are used to analyze the extracted features.

Experimental setup of ball bearing simulator with array microphone, accelerometers, proximity sensor. *Acc. (Accelerometer), Mic. (Microphone), PS (Proximity Sensor), SC (Signal Conditioner)
For fault identification, SKF-6205, deep groove ball bearing (DGBB) is used for analysis. Before the diagnosis of the fault, the bearing is subjected to load for a period of 25 h in a Spectra Quest bearing prognostic simulator. The developed fault is further analyzed using the fabricated experimental setup as shown in Fig. 1. The bearing configuration and the fault frequencies are listed in Tables 1 and 2.
5 Results and Analysis
The vibro-acoustic features can be used simultaneously to detect diagnosis of fault. The behavioral patterns for the four different algorithms are investigated in the detection of the fault as well as the exact IMF (intrinsic mode functions) identification that exactly emulated the faulty state of the bearing. The mode mixing problem in EMD is investigated further using EEMD and CEEMDAN.
5.1 Fast Fourier Transform
FFT is the hidden basic building block of all the signal processing and decoding algorithms, even though the extraction method changes with bit variation in the basis functions. The result for the acoustic and vibration response of the faulty bearing is as shown in Figs. 2 and 3.

Time response of acoustic (top) and vibration (bottom) data samples

Frequency response of acoustic (top) and vibration (bottom) data samples
It can be observed that the rotation of the shaft of 50 Hz as in Table 2. is traced with its corresponding harmonics as in Fig. 3. The fault frequency is also identified as 270 Hz, which closely matches with the inner race fault of the bearing. It can be drawn that the maximum failure in the bearing due to loading is caused due to the inner race. The detection of inner race fault is significant as compared to the outer race under radial load. The limitation of FFT in analyzing non-linear and non-stationary signals calls for new algorithms.
These algorithms generally deal with noises that are Gaussian. The statistical distributions of the time domain signals for acoustic and vibration signatures are as in Figs. 4 and 5. The ranking of the distributions are based on Chi-squared test. The purpose is to check the exact distribution of acoustic and vibration and their probability density function.

Probability density functions for acoustic signal

Probability density function for the vibration signal
It is observed from Fig. 4 that the acoustic data follows normal distribution (rank 3) and the fitness function of this distribution is higher compared all other distributions. This is true for our experimental data; it is not always true that the data matches to the normal distribution. If the data matches to the perfect normal distribution then Principal component analysis can be used for blind source separation as mode mixing are concerned. If the signal distribution are non-Gaussian then ICA (Independent component analysis) can be used just after is processed by the any of the non-linear and non-stationary algorithms considered in [15].
Figure 5 shows that the Beta and Johnson SB distributions are best suited as compared to the normal distribution (rank 5). The distribution has tremendous impact on the analysis process and the techniques used.
5.2 Empirical Mode Decomposition
To extract the non-linear and non stationary feature of the bearing, further signals are decomposed into their IMF’s (intrinsic mode functions). The extracted results for the acoustic and vibrations are as shown in Fig. 6. It is observed from Fig. 6a that the IMF 3, 4 have the same significant peak at 270 Hz. Even though the algorithm could able to trace the fault signature and matches to Fig. 3, the selection of IMF is now difficult as the same frequency reflects at multiple decomposition levels. It can be observed from Fig. 6b that for vibration signal analysis the mode mix-up happens at the fifth order harmonics i.e., 249.4 Hz of the rpm rather at fault frequencies. It means the signal of acoustic and vibration even though looks for the same source i.e., bearing; they have different statistical distributions as observed in Figs. 4 and 5.

Time (left) and frequency (right) response of a acoustic and b vibration signals using EMD
5.3 EEMD
The analysis is further verified using EEMD technique. It is observed from Fig. 7a that, the intensity of vibration falls to lower level as compared to the EMD, but the detection of rpm of the mill is stable for both acoustic and vibration signals i.e., 50.18 Hz. Figure 7a, b are in more congruence as compared to Fig. 6a, b.

Time (left) and frequency (right) response of a acoustic and b vibration signals using EEMD
The rpm detection is erroneous in case of EMD for acoustic signal. The EEMD algorithm is best suited to extract all the information independent of the data types i.e., acoustic or vibration as compared to EMD. As the problem of mode mixing is concerned EEMD also has the same problem as that of EMD.
5.4 CEEMDAN
The detection and analysis is further validated using CEEMDAN. It can be observed from the acoustic patterns in Fig. 8a, that the acoustic pattern is well verse with the Fig. 7a. The same analysis for vibration results shows that the Figs. 7b and 8b are in congruence. There is no significant difference between EEMD and CEEMDAN. The computational extraction level increases as the decomposition level increases as in Table 3. The computational complexity of CEEMDAN is lower than that of EEMD with effective signal extraction for both acoustic and vibration signals.

Time (left) and frequency (right) response of a acoustic and b vibration signal using CEEMDAN
All the algorithms are very effective in extracting the inner race fault of the bearing effectively, if the mathematical Eqs. (1–4) are known. All these algorithms having short fall in avoiding mode mixing problem occurred in the bearing fault analysis. These techniques are adaptively decomposes into number of levels as compared to the VMD algorithms, but the mode mixing problem can be avoided using VMD, but VMD is not applicable for non stationary signal analysis. To avoid mode mixing, the data need to be statistically distributed using statistical tool and further the data need to adaptively un-correlate the correlated IMF components using ICA (independent component analysis) [15].
6 Conclusions
CEEMDAN perform better than all other algorithms in terms of signal detection and computational time, but lags to avoid the mode mixing problem. These algorithms can be used to detect amplitude and frequency modulated fault signals adaptively. All the algorithms except FFT can be used for nonlinear and non stationary signal analysis with effective identification of the inner race fault in the bearing. These algorithms are prone to mode mixing problems, even though they effectively extract the information content. These algorithms computational cost increases as the standard deviation is chosen to a lower value and the sample length selection is higher. In future, the extraction of the feature using these algorithms followed by statistical distribution analysis and Independent component analysis can be used to eliminate the mode mixing problems.
References
T. T. Company (2011) Timken bearing damage analysis with lubrication reference guide. Timken Co, pp 1–39
Upadhyay RK, Kumaraswamidhas LA, Azam MS (2013) Rolling element bearing failure analysis: A case study. Case Stud Eng Fail Anal 1(1):15–17
Sadeghi F, Jalalahmadi B, Slack TS, Raje N, Arakere NK (2009) A review of rolling contact fatigue. J Tribol 131(4):041403
Al-Ghamd AM, Mba D (2006) A comparative experimental study on the use of acoustic emission and vibration analysis for bearing defect identification and estimation of defect size. Mech Syst Sig Process 20(7):1537–1571
Tandon N, Nakra BC (1992) Comparison of vibration and acoustic measurement techniques for the condition monitoring of rolling element bearings. Tribol Int 25:205–212
Rezaei A, Dadouche A, Wickramasinghe V, Dmochowski W (2011) A comparison study between acoustic sensors for bearing fault detection under different speed and load using a variety of signal processing techniques. Tribol Trans 54:179–186
Kankar PK, Sharma SC, Harsha SP (2011) Rolling element bearing fault diagnosis using wavelet transform. Neurocomputing 74(10):1638–1645
Lei Y, Lin J, He Z, Zuo MJ (2013) A review on empirical mode decomposition in fault diagnosis of rotating machinery. Mech Syst Sig Process 35(1–2):108–126
Mohanty S, Gupta KK, Raju KS, Singh A, Snigdha S (2013) Vibro acoustic signal analysis in fault finding of bearing using empirical mode decomposition. Int Conf Adv Electron Syst 29–33
Torres ME, Colominas MA, Schlotthauer G, Flandrin P (2011) A complete ensemble empirical mode decomposition with adaptive noise. In: ICASSP, IEEE International Conference on Acoustics, Speech and Signal Processing, pp 4144–4147
Colominas MA, Schlotthauer G, Torres ME, Flandrin P (2012) Noise-assisted Emd methods in action. Adv Adapt Data Anal 4(4):1250025
Dragomiretskiy K, Zosso D (2014) Variational mode decomposition. IEEE Trans Sig Process 62(3):531–544
Li W, Zhu Z, Jiang F, Zhou G, Chen G (2015) Fault diagnosis of rotating machinery with a novel statistical feature extraction and evaluation method. Mech Syst Sig Process 50–51:414–426
Mohanty S, Gupta KK, Raju KS (2015) Multi-channel vibro-acoustic fault analysis of ball bearing using wavelet based multi-scale principal component analysis. Twenty First Natl Conf Commun 1–6
Tang B, Dong S, Song T (2012) Method for eliminating mode mixing of empirical mode decomposition based on the revised blind source separation. Sig Process 92(1):248–258
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing Switzerland
About this paper
Cite this paper
Mohanty, S., Gupta, K.K., Raju, K.S. (2016). Vibro-Acoustic Fault Analysis of Bearing Using FFT, EMD, EEMD and CEEMDAN and Their Implications. In: Soh, P., Woo, W., Sulaiman, H., Othman, M., Saat, M. (eds) Advances in Machine Learning and Signal Processing. Lecture Notes in Electrical Engineering, vol 387. Springer, Cham. https://doi.org/10.1007/978-3-319-32213-1_25
Download citation
DOI: https://doi.org/10.1007/978-3-319-32213-1_25
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-32212-4
Online ISBN: 978-3-319-32213-1
eBook Packages: EngineeringEngineering (R0)