
Abstract
In a future world with pervasive Human Computation (HC), there may be profound effects on how humanity functions at multiple levels from individual behaviors to species/wide changes in evolutionary development. What would such an HC/shaped human society look like? This hypothetical society would be the result of successful adaptations that provide both increased benefit to the high/level facilitators of large-scale computations as well as sufficient incentives to individuals to participate in those computations.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others



Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
In a future world with pervasive Human Computation (HC), there may be profound effects on how humanity functions at multiple levels from individual behaviors to species-wide changes in evolutionary development. What would such an HC-shaped human society look like? This hypothetical society would be the result of successful adaptations that provide both increased benefit to the high-level facilitators of large-scale computations as well as sufficient incentives to individuals to participate in those computations. In nature, the eusocial insects (Wilson 1971) are a living outcome of similar multi-level selective pressures. Modern-day colony-living honeybees, wasps, and ants descended from a solitary ancestor in which daughters sacrificed their own chance at reproduction to help their mother have more offspring. Despite the apparent reproductive costs, sociality succeeded due to the benefit of indirect reproduction through helping relatives, as well as the competitive advantage enjoyed by cooperative groups. Colony size and complexity expanded over evolutionary time, eventually producing elaborate societies in which reproduction is centralized in a single mother queen, and all other tasks (e.g., brood care, waste management, foraging) are distributed among specialized groups of effectively sterile workers. In these modern colonies, each task group functions like a specialized colony-level organ—the queen acts as the colony’s gonads, the nurse workers act as its womb, a waste-management team provides excretory function, foragers seek and find food, and a food-processing team acts as a gut that receives, stores, and distributes food to the rest of the colony. Consequently, the eusocial insect colony is often called a superorganism (Hölldobler and Wilson 2009) composed of individual organisms functioning together to support the activities of the colony as a whole. Even if HC does not result in physiological specializations in humans, it is possible that humanity shaped by HC will evolve analogous specialized organizational structures or even worker castes. Thus, the decentralized superorganismic behavior of eusocial insect colonies can be a window into the future of Homo sapiens. It can both provide design support to technology-mediated Human Computation and highlight the risks that emerge in the formation of such collaborative groups.
Existing Human Imitations of Eusocial Insect Society
There are already signs that the trajectory of Human Computation is following that of eusocial-insect evolution. To make this comparison, we use parlance from evolutionary biology to characterize different forms of HC. In particular, when we say that one form is more “primitive” (or less “derived”) than another, we mean that it better resembles ancestral versions. This relationship is not necessarily temporal; a more derived species can exist at the same time as a more primitive species. Likewise, as different forms of HC evolve in parallel, some will show more signs of innovation than others.
Perhaps the most primitive form of distributed HC is open-source software (OSS). We say that OSS is primitive because, although it differs notably from software development by a single individual or proprietary software team, the code contributed by each individual of an OSS team is not significantly different in form to the code developed in more traditional settings. In OSS development, individuals share their source code with the Internet at large, and other skilled developers join the effort to maintain and extend the codebase. In many cases, although work is distributed across a team, the key priorities remain consistent with the goals of the founding developer who remains in contact with the team on Internet forums or mailing lists. If that founder leaves the team (either explicitly by announcement or implicitly by prolonged absence), a successor may be appointed. Alternatively, elite members of the remaining team may assert themselves as new creative directors of the project. This process can involve conflict between these elites until agreement on a future direction is established. Alternatively, even when the founding developer is still present, some individuals may leave the group and create a new branch of the software that eventually becomes independent. Moreover, developers of any rank may choose to switch efforts to other unrelated projects at any time.
This process of leadership evolution, conflict, reproduction, and group change is not unlike the development of certain more evolutionarily primitive social insect species. Like developers in an OSS team, members of these primitive societies retain many morphological and behavioral features of their solitary cousins; like OSS teams, however, these societies have also evolved special structures that facilitate superorganismic specialization. Here, we develop this comparison by focusing on the polistine wasps and ponerine ants.
Paper Wasps and the Evolution of Open-Source Software
First, we consider projects where each developer retains a freedom of action that resembles that of a paper wasp (Fig. 1). Unlike more derived social insects, where the evolution of specialized morphological castes prevents workers from founding new colonies, a paper wasp can leave her nest at any time to start or join a new one (Bhadra and Gadagkar 2008; Nonacs and Reeve 1993, 1995; Reeve et al. 2000; Shakarad and Gadagkar 1995). In the same way, the developers we focus on here can leave an OSS project at any time to join existing projects or start their own new projects.

Primitively eusocial wasps of the polistine (paper wasp) subfamily (Photo credits to: K. Chandrasekhara (top photo in (a)); Anindita Bhadra (bottom photo in (a)); Thomas Bresson (top photo in (b)); Fabio Brambilla (bottom photo in (b))
Life Histories of Nests and Software Within Open-Air Copyleft Ecosystems
In an experiment with the paper wasp Ropalidia marginata (Fig. 1a), Shakarad and Gadagkar (1995) observed a wide variety of nest histories, summarized in Fig. 2. In about one fifth of cases, a single wasp builds the nest, lays eggs, and feeds and protects her brood as they mature to adulthood. In the remaining cases, a team of wasps founds a nest together and shares these tasks. In either case, there is only one active egg layer at a time even though all foundresses have the ability to lay eggs; this egg layer is the so-called “queen” and parallels the role of an OSS team leader who provides high-level architectural direction for the software. After a nest is founded, the queen can be usurped by existing nest workers or by new individuals who join the nest and seize control over egg laying. Whether laying eggs or not, foundresses can leave a nest to join a new nest, and any queen that has been usurped always leaves her original nest. Due to these losses, nests can also become orphaned, with no remaining workers to care for any surviving brood. Similarly, OSS software projects with publicly available codebases hosted on third-party web sites (e.g., Google Code, GitHub, BitBucket, SourceForge) may become orphaned by their founding developers. Just as orphaned nests are sometimes adopted by newly arriving wasps, orphaned software projects can be adopted by new developers who never have any contact with the original developers. The nests of R. marginata are perennial and may survive long after the original foundresses have left the nest. Likewise, OSS software projects hosted on third-party services can have lifetimes far longer than the average time each individual developer commits to the project.

Life history trajectories of paper wasp nests. The paths depicted are a simplified reproduction of results from an experiment by Shakarad and Gadagkar (1995) with Ropalidia marginata. Every path describes the history of at least one nest observed in the experiment. A nest is considered to be successful if it produces adult offspring. A wasp that assists in the construction of a nest is called a “foundress” of the nest. Wasps that assist in the rearing of brood but do not lay any eggs are called “workers.” Wasps that join a nest after its construction are called “joiners.” A “takeover” event is when the single egg layer of a nest (i.e., the “queen”) is usurped by another who then becomes the nest’s new egg layer
Keeping this nest–project parallelism in mind, the evolution of OSS work-sharing structures is likely similar to that of primitive sociality in paper wasps. In the early days of OSS, the source code for small, mostly non-commercial software was made available for public distribution by individual developers. Like wasps joining an existing nest, other developers could make incremental improvements without the large time investment needed to build the entire project from scratch. Like wasps, these developers could join and leave projects at will. In nature, such wandering wasps are very likely to find new nests to join because nests are physically accessible to the open-air environment. In the OSS ecosystem, so-called “copyleft” licensing schemes create a similar open atmosphere. The salient features of copyleft licensing (St. Laurent 2004) are that source code must be distributed with projects and that derived work must inherit the license. Consequently, copyleft OSS projects beget more copyleft OSS projects, and each copyleft project provides interested wandering developers an opportunity to see, interact with, and even re-distribute modified forms of the project’s software code. Increasingly powerful collaborative software version control systems, like Git (Loeliger and McCullough 2012), and large source-code hosting providers, like GitHub, act like new man-made structures on which wasp-like developers can build nest-like projects, and developers can easily move from project to project.
Moreover, just like the turnover of egg-laying individuals in paper-wasp nests, the focal individual associated with a project can change over time. Some projects will fail due to abandonment, but some abandoned projects will later be resurrected by new developers. Still, even when a project has an active developer base, it may fail to attract widespread attention and can be superseded by other functionally similar but unrelated projects. Moreover, a long-lived successful project must attract sufficient interest from other strong developers to withstand the loss of its original founders. In both paper-wasp nests and OSS projects, an open environment for mobile individuals that have the ability to work alone or in teams generates dynamical trajectories similar to those depicted in Fig. 2.
Leadership Maintenance: Queens, Nests, and Internet Forums
Despite their name, the queens of highly derived social-insect species have little-to-no role in managing the activity of workers. In these species, once a colony is established, its queen is only responsible for laying eggs. This level of decentralization is extreme even for present-day state-of-the-art examples of Human Computation. In HC-primitive OSS teams, elite leaders still naturally emerge and help to facilitate the synchronization discussed earlier in the Analysis portion of this book. Likewise, the queens of primitively eusocial paper wasps not only lay eggs but play an active role in coordinating colony activities. Furthermore, the mechanisms these leader queens use to regulate activity are remarkably similar to the strategies available to OSS team leaders via Internet-enabled communication. In studies with the paper wasp Polistes fuscatus (Fig. 3), removal of a queen from her nest led to colony activity that was strongly depressed, and workers became far less synchronized (Reeve and Gamboa 1983, 1987). Moreover, when the queen was chilled to make her totally inactive and yet still observable by her workers, colony activity was even further depressed.

Polistes fuscatus (Photo credits to: Ettore Balocchi (left photo); Ken Thomas (middle and right photos))
In the case of P. fuscatus and many other paper wasps, the queen’s coordinating role depends on her use of aggression to stimulate activity, and a successor queen can be predicted from a dominance hierarchy (Deshpande et al. 2006; Pardi 1948; Reeve and Gamboa 1987; West-Eberhard 1969). This top-down leadership structure seems more characteristic of large proprietary business software projects that are driven by company profit, developer salary, and managerial rank. However, some paper wasp species manage nest coordination in a distributed way that seems more similar to OSS teams. In Ropalidia marginata (Fig. 1a), there is very little observed aggression, no dominance hierarchy, and no known way to predict the line of queen succession (Bhadraa et al. 2007; Bhadra and Gadagkar 2008). Computer simulation further shows that observed levels of coordination cannot be maintained via direct wasp-to-wasp interactions, and there is evidence that the queen instead makes her presence known by continuously depositing a non-volatile pheromone, or chemical signal, directly onto the nest (Bhadraa et al. 2007). Each deposit of this pheromone would be perceivable only by nearby wasps (i.e., it would not spread throughout the nest), and its effect would fade over time as the pheromone signal decayed. Thus, the queen and her pheromone are like an OSS developer moving from one public Internet forum to another posting messages and code patches that are observable to many other team members even after the developer leaves the forum. For large projects distributed over a wide geographic area, such indirect coordination is the rule. Project leaders can confront individuals directly and privately, but one-on-one communication with the project lead is not feasible even for small teams.
In both wasps and OSS teams, reliance on indelible and informative observable signals facilitates changes of leadership. When the original queen is lost from a wasp colony, a new queen emerges swiftly (i.e., within minutes) without contention (Bhadra and Gadagkar 2008). This lack of conflict is evidence that the putative nest pheromone is an honest signal of fertility that sufficiently suppresses egg laying in other workers; otherwise, candidate queens would initially compete to demonstrate reproductive dominance. Similarly, when leaders of OSS teams are active, their presence is observable and their competence can be measured by reviewing the comments they make and the software patches they commit to public repositories or submit to public mailing lists for group review. The absence of an OSS leader is palpable, and a competent replacement emerges quickly without contention because of the transparency of the entire group’s participation in the project. Just as potential new queens can demonstrate fertility honestly through production of pheromone, new OSS leaders can demonstrate competence honestly through the team’s awareness of their recent contributions to the project. In the case of R. marginata, fast succession has been adapted to tropical, aseasonal climates where queen replacement is frequent (Deshpande et al. 2006); in the case of open-source software, swift succession is necessary to maintain the energy and momentum of the project.
Primitively Eusocial Ponerine Ants, OSS Teams, and Technology-Mediated Leadership
To continue the analogy with HC-primitive open-source software, we focus on superorganismic characteristics that stem from evolving caste systems in primitive eusociality. Whereas the paper wasps represented early OSS projects staffed by developers with similar capabilities, these more evolved eusocial societies will represent larger, more-modern OSS teams with a subset of individuals whose small or very specialized skillset puts leadership out of reach. Members of this class of developers must necessarily associate themselves with a leader. Consequently, when a new leader emerges and initiates a new project derived from the original project, she may bring with her a team of developers whose interests are more aligned with her vision than the original leadership. If the daughter project is sufficiently different from the parent (e.g., the Songbird media player and Thunderbird mail client were each derived from a codebase originally intended for the Firefox web browser), the two projects will not compete with each other. However, some competition is unavoidable (e.g., the Pentadactyl daughter and Vimperator parent extensions for Firefox which now are in direct competition for developers and audience).
Although paper wasps form social colonies with reproductive division of labor (i.e., a single egg-laying queen and a worker caste), they are referred to as being primitively eusocial because workers and queens are essentially indistinguishable, and workers retain reproductive capabilities (Wheeler 1986; Wilson 1971). That is, primitively eusocial workers are not apparently very different from their solitary ancestors. Higher (i.e., more derived) levels of eusociality are characterized by the addition of specialized worker castes that assist the reproductive caste but cannot themselves reproduce (Hölldobler and Wilson 1977, 1990, 2009; Wheeler 1986). Similarly, we refer to OSS as a primitive example of Human Computation because each member of the team is almost indistinguishable from a classical software developer. More derived versions of HC are marked by individuals that lose the ability to do similar work in isolation. To understand the evolution of these more derived cases, we now focus on social-insect species that show more specialization than the paper wasps.
Specialized castes are found in all the major eusocial insect taxa, but the most striking differences between workers and reproductives are seen in the ants and termites (Peeters and Ito 2001). This extreme differentiation in these groups is because they, unlike the wasps and bees, combine a flightless worker caste with a winged reproductive caste. The flightless workers are well adapted to their terrestrial ecological niche, while the flying abilities of reproductives allow them to disperse far from their natal nest in search of a diverse gene pool for mating. In many ant and termite species, queens are further specialized to take on the unique tasks of independent colony foundation, when they must build a nest and rear the first generation of workers without any parent-colony support.
Thus, we now shift our focus to primitively eusocial ants from the subfamily Ponerinae. If the paper wasps are like small teams of software developers who could each start a new project entirely on their own, ponerine ants are like larger projects that include some developers with only the skills or interests to work on specialized sections of a project initiated by someone else. Like the paper wasps, these ant colonies contain individuals who could potentially be queen; however, they also have many ants that can only function as workers (Hölldobler and Wilson 1990, 2009; Peeters and Ito 2001; Wheeler 1986). We discuss here how ants in the reproductive class maintain their elite status and control over colony direction. In particular, we focus on two control mechanisms in ant colonies that are similar to technology-mediated solutions seen in OSS teams.
Source Control and the Mutilation of Reproductive Organs
In the course of a large open-source-software project, new project leaders may emerge from within the team’s elite members. Due to the openness of the codebase, one industrious individual may start to usurp ownership by rapidly reshaping large portions of the source code. As other workers on the team modify the resulting code, they become committed to it, and a reversal to the basal code becomes less likely. To prevent this, many OSS projects restrict direct access to the codebase to very few individuals. New code is instead posted in so-called “patches” to mailing lists where it can be reviewed and responded to by other developers; the keepers in charge of the codebase can then accept or reject each patch. If these keepers become unresponsive for a long time, others who have been maintaining clones of the codebase can assert themselves as the new masters. Thus, the access limitations on these source-code repositories provide technological mediation of source control, and the ability to create clonal repositories with different access limitations lets source control evolve.
This technologically mediated process is not unlike reproductive succession in the ponerine ant genus Diacamma (Fig. 4a) (Baratte et al. 2006; Cuvillier-Hot et al. 2002; Gotoh et al. 2005). In these queenless ants, all individuals are physiologically capable of mating and producing offspring; however, a single mated worker, called the “gamergate” (Peeters 1991b), assumes the role of an egg-laying queen, suppressing reproduction in all other workers in a peculiar way. When each young worker first emerges from her cocoon, she bears a pair of small thoracic appendages called gemmae. The gamergate immediately mutilates the gemmae (Figs. 4b, c), irreversibly preventing the new worker from becoming reproductively viable. When the gamergate eventually dies, the first young worker to emerge without being mutilated will immediately take on the role of gamergate, mutilating all other young workers around her. After the new gamergate mates and begins to lay eggs, she will be accepted by the existing workers as the sole reproductive (Cuvillier-Hot et al. 2002), and the colony’s workforce will become increasingly composed of her daughters (André et al. 2001). This process parallels the project-control scheme described above, with gemmae playing the role of access-restriction technologies, and reproduction playing the role of codebase development.

Ants of the ponerine genus Diacamma. Shown in (b) is a top view of the thorax of an un-mutilated female; the gemmae are orange appendages homologous to the forewings of a male (Gotoh et al. 2005). Scanning electron micrographs of a male (left column) and a female (right column) are shown in (c) where the bottom row is a magnified version of the boxes shown in the top row. Instead of gemmae, males have wings and large flight muscles that facilitate dispersal from the nest to mate with sexually viable female workers of other colonies. As in most ants, relative to the ant’s body, the male head is significantly smaller than the female head (Photo credits to: Steve Shattuck (photos in (a)); Alfred Buschinger (photo (b)); Gotoh et al. (2005) (photo (c)))
Reputation and the Maintenance of Hierarchies
Especially when public Internet forums are involved, regulation of control of an OSS project can also involve reputation. A new developer proposing a major change can simply be shamed by a respected developer once, and other workers on the team will cease to consider any major new directions from that individual. Even if the shamed developer manages to insert new code, low-ranking individuals may revert those changes with extreme prejudice. Reputation staining is catalyzed by communications technology, such as mailing lists or Internet forums. A similar kind of communication-mediated control occurs in reproductive policing by some ponerine ants of the genus Dinoponera (Fig. 5) (Monnin et al. 2002). As in Diacamma, workers of these ants can mate and become gamergates. However, workers are not mutilated upon emergence from their cocoons and thus retain reproductive potential throughout their lives. Colonies nonetheless form a dominance hierarchy topped by a single alpha gamergate that monopolizes egg laying and does no other work in the colony. Just beneath her in the hierarchy is a caste of beta workers who do not lay eggs but also do very little work. In an OSS team, if a lead developer leaves the project, she will be succeeded by another who takes over architectural and leadership tasks. Similarly, if the Dinoponera alpha gamergate dies, a beta worker will take over and become the new sole egg layer of the colony.

A worker of the ponerine ant genus Dinoponera. These ants can be over 1 inch in length (Photo credit to Alex Wild)
Both OSS teams and Dinoponera colonies experience leadership challenges. A beta worker may engage the alpha in sequences of fighting, chasing, and trampling brood. During relatively calm periods within these sequences, the alpha will smear a chemical onto the beta, who then becomes the target of other low-ranking workers who seize and physically immobilize the challenger for several days or weeks. When finally released, she loses her rank in the hierarchy and continues her life as a worker (Monnin et al. 2002). This chemical smearing process is similar to the public shaming an upstart developer might receive from a well-respected lead developer in a public forum. After such exchanges, other developers may cease to entertain new feature suggestions by the shamed developer, who will be reduced to contributing only through the day-to-day maintenance of the established codebase. Message threads on active Internet forums become diluted into obscurity just as chemical signals gradually disperse and become imperceptible; however, the damaging exchange between developers leaves an indelible mark on the rest of the team. Thus, ants and humans have both evolved analogous mechanisms to demote middle managers who seek ascension out of turn.
Resource Limitations in Colonies and Software Teams: Alternative Reproduction Strategies
In section “Paper Wasps and the Evolution of Open-Source Software”, we explored how individual paper wasps leaving one nest could start a new nest from scratch. Now that we have shifted our focus to include colonies with large worker castes who may follow an emigrating reproductive, we can also consider the phenomenon of colony fission. Open-source-software teams can bifurcate as well; an individual developer can start a new project and take with her a sizable proportion of resources from the old project, including both team members and cloned code. Fission can be deleterious if the resulting smaller projects compete for developer resources as well as users. Even when competition is not a concern, inheriting the codebase of the initial project also means inheriting bugs, vulnerabilities, or outdated legacy structures that hinder future growth. In other cases, fission provides new per-developer opportunities by reducing team size. It also allows for software frameworks to move into new application spaces (e.g., a useful framework for a popular web browser is quickly adapted into an electronic-mail client). Fission faces similar costs and benefits in eusocial insect colonies, and consequently it is favored under only certain ecological constraints. Hence, we now consider how similar environmental conditions lead to similar foundation patterns in OSS projects and social-insect colonies.
Background: The Multiple Ways to Found a Project
Ant colonies typically reproduce by sending out specialized winged individuals called alates (Hölldobler and Wilson 1990), analogous to software developers with the ability to start and nurture a new project in isolation. Unlike workers (all of which are female), alates come in male and female forms that mate in flight after dispersing from their natal nest. The males die shortly thereafter, but the females go on to found new colonies of which they become the queen. They use sperm stored from their matings to fertilize eggs, most of which develop into sterile workers that build and defend the nest, collect food, and nurture further generations of workers. In this way, the colony grows until it is large enough to produce its own reproductive offspring. Thus, alates may be viewed like software architects that are prolific sources of ideas for software projects but must build a team of other developers (i.e., the workers) to actually implement those ideas.
Ant colony formation is typically done in isolation—a newly mated queen excavates a small nest and cloisters herself within it, rearing her first brood of workers by metabolizing stored fat and muscle. This process is analogous to a developer who leaves an old project and uses her personal time and resources to start a new OSS project that will hopefully grow and attract additional help. Sometimes, however, queens without sufficient energy stores must leave the newly excavated nest to take on the dangerous task of foraging. Likewise, the monetary income of an OSS developer likely comes from an outside occupation that prevents full-time commitment to the nascent OSS project. In the ants, alternative colony formation strategies have evolved that mitigate the high cost of independent formation (Hölldobler and Wilson 1977; Krebs and Rissing 1991; Molet et al. 2008; Rissing et al. 2000, 1989). For example, unrelated queens sometimes join forces to start a new nest together so that the burden can be shared (Hölldobler and Wilson 1977; Pollock and Rissing 1985). In software development, a small team of capable developers can similarly join forces to reduce individual workload. In a more extreme solution, seen in many ponerine ants, colonies simply abandon reproduction by female alates (André et al. 2001; Molet et al. 2008; Peeters and Ito 2001). Instead, the colony splits in two, with each segment including a flightless queen accompanied by a large retinue of workers that help her to found a new colony (Peeters 1991a,b; Heinze 1998). In the same way, a developer who chooses to start a new project can attract members of her prior projects. By bringing with her a ready-made team, she may surrender full control over the direction of the new project and will have to spend more time managing these human resources. In both the ant and OSS cases, foundation by large teams of workers inherited from a parent project reduces how often new projects are formed. In general, ant colonies and OSS projects face very similar costs and benefits to different forms of foundation, and they have evolved similar reproductive strategies to mitigate the costs and capitalize on the benefits.
Intellectual Property and Inbreeding in Lieu of New Project Foundation
In some ants, something analogous to intellectual property (IP) has led to a reduction in the occurrence of fission and an increase in inbreeding. These ants are much less like a typical OSS team aiming for new marketable features, and more like a commercial software team with the sole purpose of maintaining an existing one-of-a-kind proprietary project. That is, a nest of these ants is like a software package made for a very specialized purpose targeting a small set of high-value clientele. For example, the software that manages inventory and interfaces with cashiers at a large retail chain may be highly customized for that particular chain. It evolves over time with the customer’s needs, but it retains the aesthetic characteristics of much earlier versions of the software (e.g., keyboard-only terminal-mode applications that look relatively unchanged over several decades although the operating systems they run within become increasingly stylized). These products persist because the market is very small and controlled by few developers. Such software can be maintained by a small team of developers who become dependent upon the longevity of the product as their individual talents stagnate. If any developer leaves to join another project, she brings little with her, either because of legal restrictions or because the resources from the old project are too specialized to be of use anywhere else. If a key leader leaves, she will likely be replaced from within because no outsider would be familiar with the extremely specialized codebase.
The ant genus Harpegnathos (Fig. 6) has an unusual life history that shares many features of these proprietary software teams (Peeters et al. 2000; Hölldobler and Wilson 2009). These ants might be expected to reproduce by colony fission, like many of their fellow ponerines (Baratte et al. 2006; Cuvillier-Hot et al. 2002; Peeters and Ito 2001). In those other species, workers (or worker-like queens) mate in the nest with alate males that fly in from other colonies (e.g., André et al. 2001). They then leave to found new colonies, accompanied by a retinue of fellow workers. In this way they combine the benefits of outbreeding with the assistance of their parent colony to quickly achieve large group sizes. Harpegnathos saltator has the physiological capability to pursue this strategy (Liebig et al. 1998), but colony fission has never been observed in nature (Hölldobler and Wilson 2009). Colonies instead produce many alate queens that disperse to form new colonies in isolation. Sexually capable workers that remain in the nest may also mate, but they tend to do so with their brothers rather than with alate males from other colonies (Peeters and Hölldobler 1995). Furthermore, they do not leave the nest to found new colonies. What results are persistent colonies that remain small and experience reduced genetic diversity due to inbreeding. These behaviors appear to be driven by the highly elaborate nest structures these ants build to resist frequent flooding in their native Indian habitat (Peeters and Hölldobler 1995; Peeters et al. 1994). When the founding queen dies, a daughter gamergate inherits the valuable nest and continues to maintain and improve it. Just as a palace is passed down to noble mated cousins in a royal dynasty, this process can continue forever in principle. Consequently, nests observed in nature accumulate extremely elaborate constructions despite only containing a small number of workers at any one time (Peeters et al. 1994; Hölldobler and Wilson 2009). In short, these colonies produce gamergates not for colony fission, like other ponerines, but instead, to retain family resources despite frequent queen turnover.
This process is not unlike software projects with proprietary IP components that may prevent project replication. Alate-like developers that leave the project to work elsewhere cannot bring technology with them. Moreover, the longevity of the project is benefited by maintaining a stock of skilled workers that have experience with the proprietary IP. Like gamergates, new leaders are promoted from workers already within the project. After the death of a Harpegnathos queen or gamergate, the upward mobility of mated workers to replace her is usually accompanied by ritualized aggression (Hölldobler and Wilson 2009), which can also be seen during similar transitions in human organizations. Thus, in both software teams and Harpegnathos colonies, the existence of assets that cannot be duplicated leads to small groups with much internal turnover, even when such policies reduce diversity within the group. These assets must be extremely valuable in order to sustain these patterns despite the costs.

Ants of the ponerine genus Harpegnathos. These evolutionarily primitive ants hunt for live prey that they can spear with their pointed mandibles and then paralyze with their sting. They are also known for their ritualistic aggression displays between mated workers who compete to become an egg layer and fill the vacuum left by an expired queen (Photo credits to: Kalyan Varma (left); Steve Shattuck (right))
Using Shareable Resources to Accelerate New Colony Formation
Software projects that make use of intellectual property still contain open components that can be re-purposed in other projects. For example, a technology company may produce new hardware products that make internal use of a popular open-source-software operating-system platform. The OSS platform may be augmented by proprietary hardware drivers as well as improvements to open-source modules that ensure a certain marketable specification for the product. Those open-source components can be used on other projects even by competitors.
In a similar way, a colony of stingless bees (Fig. 7) can provide both personnel as well as physical materials in support of a new daughter colony that is the product of fission (Inoue et al. 1984; Peeters and Ito 2001). In Trigona laeviceps, for example, a colony sends a worker team to scout nearby for an empty cavity to house a daughter colony. Once found, workers carry building material from the old nest to the new site. As the amount of materials transported to the new nest is a negligible fraction of the stock at the old nest, this process is much like producing a forked repository from the open portions of an existing OSS project. After the new nest is prepared, a swarm of workers and a virgin queen fly there from the old nest. Some of these will return to the old nest, much like software developers choosing to re-join their original project after not finding interesting opportunities in the new project. The new queen mates and starts populating the colony with her daughters. Material transport from the parent nest continues for a short period, but the daughter colony eventually achieves full independence. This nest-foundation process is not unlike the genesis of an open-source project sanctioned by and based on a project with proprietary roots (e.g., the way Mozilla emerged from Netscape). The daughter project may accept contributions from the original project, but it continues with a new developer community and has a different direction than its more commercial relative. Nevertheless, because of prevailing similarities between the two projects, they may compete for user attention. Likewise, because daughter colonies of stingless bees are so close to their mother nest, there is a chance that they will compete for the same resources. Close distance helps to facilitate quick construction of new projects, but it also presents sustainability issues for their co-existence.

Stingless bees of the genus Trigona (Photo credits to: José Reynaldo da Fonseca (left); James Niland (middle and right))
Colony reproduction in honeybees (Fig. 8) shows an alternate path that leverages the aid of the mother colony while preventing future competition (Peeters and Ito 2001; Seeley 1995). Honeybees also reproduce by fission, but unlike stingless bees, they bequeath the old nest and roughly half the workers to a virgin queen. The old queen and the remaining workers leave the nest and settle at a temporary location (Fig. 8c) from which they carry out the decentralized process of finding a new home beyond the competitive reach of the old nest. Once the swarm’s scouts reach a decision quorum at a candidate site (Seeley 2010), the bees fly there and build a new nest. This process is much like a team of developers who leave a project they founded after it matures, entrusting it to a set of younger developers so that the founders can start a new project. To reduce competition, the emigrating developers choose a new application area and may sign non-disclosure or non-competition agreements. This process ensures survival of the old project and uses its stability to mitigate the difficulties that young developers may have taking over as leaders. This process also naturally allocates those developers with proven success to nascent projects that will benefit from that experience.

Honeybees from the genus Apis. In photo (c), an Apis mellifera colony makes a tree branch its temporary home; meanwhile, a decentralized selection process goes on among scouts that search for a nest cavity that will eventually become the colony’s new home (Photo credits to: Jon Sullivan (left photo (a)); Louise Locker (right photo (a)); Gideon Pisanty (photo (b)); Nancy McClure (photo (c)))
Leveraging Diversity in Large, Long-Lasting Projects
So far, we have discussed how fission alleviates some of the challenges of starting new projects. By inheriting workers and other resources, new projects immediately inherit momentum and a workforce to maintain that momentum. However, fission is not without costs. As mentioned above, daughter and parent projects must disperse far enough away from each other to prevent significant future competition. Still, even when dispersal is guaranteed, fission can proliferate deleterious parasites. In software teams, these parasites may take the form of vulnerabilities, viruses, inefficient code, deprecated protocols, or ineffective team members that slow group productivity. Similar risks exist in ants, and those species that use colony fission have also evolved mechanisms to reduce those risks.
To illustrate how ants manage the risks of fission, we contrast two groups of army ants-one that reproduces exclusively by fission and one that sometimes uses fission and other times relies on independent colony foundation. This examination is partly meant to show parallels between ant-colony and software foundation and partly meant to illustrate the dangers of building software derived from the codebase of another project. Two well-known army-ant genera are the legionary ants (Fig. 9a, Eciton) and the driver ants (Fig. 9b, Dorylus) (Gotwald 1995). Studying the similarities and differences between these two genera gives insights into the costs, benefits, and maintenance of fission. In contrast to the evolutionarily primitive ponerine ants discussed in section “Primitively Eusocial Ponerine Ants, OSS Teams, and Technology-Mediated Leadership”, the army ants are a derived species with a variety of worker castes (Hölldobler and Wilson 1990; Gotwald 1995). However, they have evolved a unique nest structure that allows for added mobility that has led to the re-emergence of reproduction by fission. Rather than excavating nests or living in pre-formed cavities, army ants link their bodies together to form living nest structures consisting of hundreds of thousands of workers (Fig. 10) (Anderson et al. 2002). These bivouacs are well suited to the ants’ nomadic lifestyle, facilitating their frequent and rapid emigrations.

Army ants. Multiple army ant worker castes are shown in each photo (Photo credits to: Alex Wild (photo (a)); James Niland (photo (b)))

Army ant (Eciton) structures. Colonies of Eciton do not nest in cavities or excavate nests in the ground. Instead, they link their bodies into large bivouacs that act as mobile nests (Anderson et al. 2002). Despite being constructed entirely of living colony members, the inside of the bivouac contains sufficient structure for chambers and division of labor based on position within the nest. When Eciton colonies reproduce by fission, bivouacs split, each one taking a queen to continue reproduction of workers after dispersal (Photo credits to Geoff Gallice)
In theory, if the competitive costs of fission can be reduced, then it should be observed more often in nature. In software terms, daughter projects will be more successful if they do not compete for users with the original parent project. For example, the Mozilla Application Suite produced daughter projects Firefox and Thunderbird which then competed with their parent for users. However, because the web browser, Firefox, and the e-mail client, Thunderbird, were different application types, they did not compete with each other. When application or geographic boundaries can prevent competition, more fission might be expected. Likewise, fission has evolved in some army-ant species because these highly mobile colonies can reduce its competitive costs. However, not all army ants reproduce this way, and those that do have had to evolve additional mechanisms to reduce other costs of fission not related to competition.
In the New World army ant genus Eciton, fission is the only method available for colonies to reproduce (Hölldobler and Wilson 1990; Peeters and Ito 2001). In contrast, many army-ant species of the genus Dorylus do not use fission even though they nest in mobile bivouacs very similar to those of Eciton. Instead, they produce alate queens that disperse from the nest and found new colonies on their own (Hölldobler and Wilson 1990). Thus, while fission reduces the burden on a daughter colony and nest mobility reduces the competitive costs of fission, Dorylus has not evolved this form of reproduction to the degree that Eciton has. Likewise, despite the wide availability of code and developers in the OSS ecosystem, new projects are periodically started from scratch, and OSS libraries are often re-factored or totally re-invented. Thus, in both ants and software development, there must be other fission-related costs to overcome.
One such cost is enhanced parasite transmission. In ants like Dorylus, there is low risk of transmission from a mother to a daughter colony because the parasites must infect the single alate founding the new colony. In Eciton, there is no such bottleneck; any of the tens of thousands of workers that join the new colony may harbor parasites. Other social features can ameliorate these risks. In Eciton, for example, high levels of task specialization may isolate worker groups from one another and their parasites. Multiple mating by the colony’s queen occurs with high frequency (Denny et al. 2004; Kronauer et al. 2007; Palmer and Oldroyd 2000; Tarpy et al. 2004); this can increase genetic diversity and thus the likelihood of the colony containing individuals with heritable resistance to any given parasite. For Eciton, an additional source of genetic diversity is colony fusion (Kronauer et al. 2010; Schneirla 1971). When a colony’s queen dies, the orphaned workers follow and eventually join other colonies that still have a queen (Schneirla 1949; Schneirla and Brown 1950).
Parallels of these fission-related costs and prophylactics can be found in OSS projects. Long-lived software projects can also accumulate deleterious “bugs” and vulnerabilities due to code stagnation, and legacy components that either depend on deprecated protocols or have prohibitive operational constraints. These problems multiply when such projects are cloned to generate the seed of a new project. Even without inherited code, developer teams can accumulate deleterious or deprecated practices. Just as for ants, foundation of software projects from scratch by single developers prevents these problems. However, independent foundation is not practical for very large projects; inevitably, teams of developers build off of existing code repositories and make use of well-known libraries. To resist infection, large OSS projects must be generated by a diverse developer community that, in the aggregate, is immune to systematic deficiencies. In particular:
-
A single developer who contributes to a wide range of the codebase may introduce the same vulnerable code (e.g., buffer overflows or dangling pointers) to multiple unrelated parts of the project. The spread of this code can eventually be limited and the vulnerable code repaired, but the full extent of how far the deleterious code has spread may not be known. So, just as a high level of task specialization in an army-ant colony reduces susceptibility, there is value for developers to limit the scope of their contributions and specialize on small components of larger projects.
-
For large OSS projects to have high longevity, organizers of such teams must promote the regular incorporation of new ideas and new developers. For ants, novelty comes from multiple mating and adoption of orphaned workers. For developers, novelty comes from continued training and incorporating new workers from outside projects. As new developers gain access to old code, additional dangerous yet subtle vulnerabilities can be found and fixed. This increased developer diversity is similar to new genetic variation that prevents the spread of an extant infection.
-
Commonly used OSS libraries and utilities are the result of combining the prior two points. That is, as a section of developers becomes compartmentalized in order to prevent the spread of infections, the subcomponent they write can become its own open-source project in order to gain the attention and additional diversity of more contributors.
These OSS practices are in stark contrast to the Harpegnathos-like projects described in section “Resource Limitations in Colonies and Software Teams: Alternative Reproduction Strategies”. For those cases, to ensure longevity of a project depending on valuable proprietary intellectual property, teams have to be kept small, stay isolated from outside influence, and generate new leaders from within the team. These practices are both impractical and ill-advised in an open-source-software project.
Future Human Imitations of Eusocial Insect Society
We have demonstrated parallels between evolutionarily primitive Human Computa-tion, like open-source software, and primitively eusocial insects, like polistine wasps and ponerine ants. Assuming that similar pressures will continue to guide the evolution of HC, then we speculate that its future forms will share similar characteristics with more derived eusociality. At the point at which Human Computation takes on superorgansmic qualities, computations will be decentralized to the point of being leaderless. Some human participants of these computations may specialize at particular tasks, but their participation in different projects will be self guided. It will be more common that participants have some ability to do a variety of tasks, and a participant may choose at any time to switch from one task to another even before completing the prior task. Often, two ongoing tasks will be in opposition to each other, and one participant will actively and unknowingly undo the work of another. Additionally, at any given time, a large proportion of potentially active participants may be idle. In general, all participants will be entirely ignorant of the collective progress toward any particular goal. Moreover, the computational strengths of these collaborations will come from the network of interactions between individuals as opposed to the individuals themselves; each individual participant will only have marginal importance. Counter intuitively, efficient and robust computation will emerge because of, not in spite of, these properties.
Just as any one species of social insect has been specially adapted for its natural environment, different tasks and interaction mechanisms will be matched to different kinds of problems. Rather than being explicitly designed, this mechanism-to-problem matching will evolve naturally from existing technologically mediated interaction networks. That is, with increasing digital connections between electronically augmented participants, there will be increasing potential for networks to do work. Just as increasing temperature can lead to phase changes in matter, increasing network potential can lead to a sudden and emergent computational ability in a group of interacting individuals. The most familiar phase changes in matter are so-called “first-order” changes that are marked by abrupt shifts in observable physical properties, like volume or density. For example, as a fluid moves through a first-order phase transition from liquid to gas, it will become a mixture of some parts that are liquid and some parts that are gas; consequently, the phase transition will be accompanied by violent boiling. However, higher-order phase transitions also exist, and these are continuous in observable properties. Under special conditions, there can be a continuous higher-order phase transition from liquid to gas which does not involve a violent mixture of the two phases; instead, the whole fluid simultaneously shares properties of both phases. In the case of HC networks, it is likely that the transition to superorganismic computation will be of this latter kind. Moreover, as we will show, there are signs that some networks are already near the continuous transition region—exhibiting early transitory signs of superorganismic computation.
In the remaining section of this chapter, we give examples of superorganismic computation in highly derived eusocial insects and speculate about parallels with future Human Computation. When possible, we highlight existing technologically mediated human organizational structures that share properties with these natural insect systems.
Oligogyny and Leaderlessness: Competitors that Share the Same Workers
After colony foundation, a queen plays little role in coordinating the activities of her colony. Her main responsibility is to produce new workers and reproductives. Whereas the natural lifespan of a worker may be on the order of months, a queen can live for years or even decades. Despite this relatively long life, she carries no seniority; she is largely at the mercy of her workers. Thus, a queen is less like a leader than a captive wealthy donor who has no choice but to continue funding her captors.
As described in section “Background: The Multiple Ways to Found a Project”, a colony can be founded by multiple unrelated queens that may then continue to co-exist after colony foundation (Hölldobler and Wilson 1977, 1990; Pollock and Rissing 1985). Continuing the analogy with donors funding a large-scale HC project, this so-called “polygyny” might be thought of as multiple donors pooling their resources to better support a common goal. However, in functioning eusocial insect colonies, standing queens in the same colony can be antagonistic rivals. This special form of polygyny, known as “oligogyny,” is seen in the meat ant Iridomyrmex purpureus (Hölldobler and Carlin 1985) (Fig. 11), and in Camponotus ligniperdus (Gadau et al. 1998), a species of carpenter ant (Fig. 12). While queens in oligogynous colonies are hostile to each other, their workers tolerate all of the queens and each other. Moreover, they form a barrier between the queens, eliminating dominance behavior and allowing all queens to produce brood. Consequently, workers in oligogynous colonies show relatively low levels of relatedness. Although workers from different colonies may be hostile to each other (Gadau et al. 1998), workers from an extant colony will adopt a newly inseminated queen (Hölldobler and Carlin 1985; Hölldobler and Wilson 1990). Thus, the genetic variation among workers does not come from fusion with other colonies or initial foundation by multiple queens but instead from continual adoption of newly inseminated queens.

Meat ants (Iridomyrmex). These omnivorous ants are found in Australia, where they form large colonies and scavenge for a wide variety of foods including large animal carcasses (Photo credits to Steve Shattuck)

Carpenter ants (Camponotus). This diverse genus of ants nests in hollowed-out cavities in wood, explaining their common name. Some species have distinct morphological worker castes determined by their environment during development; these castes differ in both morphology (e.g., size) as well as behavior. Like other ants of the formicine subfamily, Camponotus primarily defend themselves by biting and spraying acid as opposed to using a sting. Consequently, researchers who collect Camponotus ants in the field cannot use mouth aspirators because it could lead to inhaling large quantities of the irritant. At least one species, C. saundersi, possesses large mandibular glands filled with a sticky corrosive secretion; the ant can then contract abdominal muscles in a suicidal act that ruptures these glands and sprays this immobilizing secretion onto its attacker. Some Camponotus ants, like the ones shown in (c) and (e), have been likened to aphid ranchers; not only do they forage on secretions from the aphids, but they protect the aphids from predators and periodically relocate them much like a human rancher protects and herds cattle (Photo credits to: John Tann (photos (a), (b)); John Beetham (photos in (c)); Steve Shattuck (photos (d) and (f)); Ryan Wick (photo (e)))
Internet marketplaces, like Amazon Mechanical Turk (MTurk) (Amazon.com, Inc. 2005), are presently some of the most advanced examples of crowd-sourced Human Computation, and they are much like oligogynous ant colonies. On MTurk, a class of human requesters makes monetary payment available to a class of human workers who can choose to complete tasks designed by the requesters. In principle, the requester class may contain multiple business competitors that each use MTurk as a source of shared computational power—it is as if competing car makers produced vehicles using the same manufacturing line. The MTurk interface prevents any requester from directly impeding the progress of another requester while allowing all workers the opportunity to complete tasks of any and all requesters. Thus, just as queens in an oligogynous ant colony perform the important task of replenishing the work force, requesters replenish the payments that are necessary for human workers to do work. Moreover, just as the crowded colony buffers the queens from ever discovering each other, the MTurk interface prevents interactions between requesters. In nature, not every inseminated queen will be lucky enough to be adopted by an existing colony. Likewise, on MTurk, not every requester will be fortunate enough to benefit from the collective action of the workforce. Thus, as described at the start of this section, it is the decentralized network of workers that both provides computational power and selects the problems for which that computational power will be used.
Still, despite its workforce being decentralized, the MTurk mechanism itself is a centralized bottleneck that is notably distinct from an ant colony. In the future, it can be assumed that MTurk will be replaced by a truly decentralized network of peer-to-peer software that both buffers requesters from interfering with each other and allows workers to self allocate to different tasks entering the network. The behaviors that facilitated this level of decentralization in ants arose randomly and were favored by natural selection because they led to emergent and efficient task allocation. Likewise, the peer-to-peer software that will facilitate similar structures for Human Computation will likely emerge randomly due to the efforts of a few empowered developers, see widespread adoption by a decentralized population of requesters and workers, and then be self sustained by massive activity levels.
Decentralized Harmony Through Individual Contention
Now that we have discussed how networks can self allocate tasks to connected workers, we shift to considering how tasks might interact or even interfere with one another. Honeybees, Apis mellifera, construct nests out of wax secreted from glands in their abdomens that they mold into large combs. Each comb consists of a regular array of hexagonal cells (Fig. 13) that are used to store honey and pollen, and also serve as cradles for rearing new female workers, male drones, and virgin queens. Characteristics of each cell, particularly its size, are specialized for its target contents. Thus, the comb must be constructed so that the relative proportions of each type of cell match the particular foraging environment and sex-allocation strategy of the colony. The construction of this properly proportioned comb is a highly decentralized process in which hundreds of bees contribute to the construction of each cell (Pratt 2004). Individual bees often appear to work at cross purposes, with one bee applying wax that is removed seconds later by another bee. Indeed, the construction of a cell can be followed by its complete destruction before it even is used (Cargel and Rinderer 2004). From this description alone, this process seems arbitrary and capricious and possibly inferior to the blueprinted construction of human buildings; however, it somehow consistently leads to recognizable, elegant, and functional structures in nature.

Honeybee (Apis mellifera) comb. Shown in (b) are several stages of comb construction (Photo credits to: David Goehring (photo (a)); Beach and McMurry (1914) (photo (b)))
Recently, roboticists have taken an interest in synthesizing large groups of robots that function like honeybees to assemble collections of heterogeneous parts into desired configurations without central control. These robots might be found scurrying around a factory floor, tirelessly converting raw materials at one end to products at the other. Alternatively, microscopic versions might be injected into a human patient to actively regulate the proper proportions of cholesterols in the blood. The need for decentralized control is especially apparent in the microscopic case, where the robots will operate without external control and without sophisticated communication abilities. Matthey et al. (2009) used simple chemical reaction networks (CRNs) to generate local interaction rules for robot teams that guarantee construction of desired quantities of different products. We summarize some key results of that model to show how apparent contention, like that observed in honeycomb construction, may be necessary to ensure proper function at the level of the collective.
In the target application of Matthey et al., robots move randomly around a two-dimensional arena that is cluttered with parts of different types. For simplicity, we assume there are three different part types, A, B, and C, that can be combined to make two different conglomerate products, A B and B C. These two different part assembly plans can be written
However, parts cannot assemble themselves. It is the role of the robots to pick up the parts, find other robots carrying other parts, and then assemble the conglomerates. Thus, if we let A, B, and C represent types of parts that are currently in motion on a robot, we can introduce corresponding types, a, b, and c, to represent stationary parts waiting to be found and loaded onto an unburdened robot. If unburdened robots are themselves considered to be a fictitious part type R, then we can augment the assembly plan in Eq. (1) with
So a stationary part of type a encounters a robot of type R, and the two combine to become mobile part A. That mobile part A eventually combines with another mobile part B to become a mobile conglomerate A B and a liberated robot that is free to find other stationary parts to pick up. Thus, the complete assembly plan is
In this scenario, robots encounter parts and other robots at an average rate that is a function of the robot speed and the relative geometries of the robots, parts, and the arena. Thus, the random process of robots picking up and assembling parts is not unlike the random process of gas molecules finding and reacting with each other. Based on this reasoning, Matthey et al. convert the assembly plan in Eq. (2) to the chemical reaction network
where each reaction rate k i ≜ e i p i is the product of e i , which is the mean encounter rate between any pair of the corresponding reactants, and p i , which is the probability that the corresponding reactants will carry out the reaction after the encounter. Although each encounter rate is a function of the environment, the reaction probability can be picked a priori before dispatching the robot swarm. Thus, the programmer has the freedom to choose these reaction probabilities in order to control the reaction rates. In principle, the resulting system can have an equilibrium distribution of entities that is predictable from the theory of continuous-time Markov processes. This distribution will be parameterized by the reaction probabilities, and so the swarm can be “programmed” to reach a target distribution by choosing the corresponding set of probabilities. However, if only forward (i.e., constructive) reactions are possible, then this stable equilibrium distribution will not exist. In order to generate a stable equilibrium of conglomerates, reactions must be reversible, as in the final assembly reaction network
which is identical to Eq. (3) augmented with several spontaneous reverse (destructive) reactions that reduce assembled conglomerates (e.g., A B) back into mobile and unmoving parts (e.g., A and b) that will then be free for future forward (constructive) reactions. Whereas the forward reaction rates are manipulated through setting reaction probabilities, the reverse reaction rates reflect a programmed timeout on each robot; after carrying a conglomerate object for sufficiently long, the robot breaks the object into its constituents. By tuning the tension between the forward and reverse reaction rates, the decentralized random collective process will maintain a precise balance between the average numbers of A B and B C conglomerates. In other words, because the decentralized process provides no feedback to individuals about the global number of conglomerates, there is no way to inhibit the construction of a particular conglomerate when a surplus develops. However, because of the reverse reactions, a surplus of that conglomerate will catalyze its own reduction; the greater the surplus, the greater the propensity of reverse reactions to reduce the surplus. Thus, even without individual-level feedback, the collective is able to regulate properties of the ensemble.
Although simultaneous construction and destruction seems counterproductive, it is possible that it reduces the amount of centralized coordination necessary for a given distributed task. In fact, Livnat and Pippenger (2006) make the argument that, due to physiological limitations, internal conflict is actually the optimal strategy even within a single human brain. Thus, in highly decentralized instances of HC in the future, individual-level tasks may necessarily undo the apparent progress of other individual-level tasks. Furthermore, some individuals within a collective computation may come into direct one-on-one conflict with other individuals, as occurs between ant workers in some species (Hart and Ratnieks 2001). This apparent local conflict, however, will ensure progress toward the collective goal.
Individual Ignorance Reduces Collective Cognitive Overload
Not only is an ant colony highly decentralized, but its work is completed by ants that are ignorant of colony-level objectives as well as their role in achieving those goals. Army ants are a clear example of global effectiveness emerging from individual ignorance. These ants are named for their group raiding behavior, in which large swarms of foragers flush out and capture insect prey (Fig. 14). The raiding groups form long branching columns guided by chemical trails, along which they return prey to the nest. These species-typical branching patterns of raiding columns emerge without any individual ant possessing any information whatsoever about their existence. In fact, the ants are virtually blind and navigate entirely by following the chemical pheromones left by their nestmates (Gotwald 1995). Distinct branching patterns emerge from interactions between the ants’ simple rules for responding to pheromones and the distinctive spatial distributions of the different prey types used by each species (Franks et al. 1991).

Army ant (Eciton burchellii) raiders carrying captured brood from a wasp nest back to their home bivouac. Army ants are named for this characteristic group foraging behavior. A large team of foragers marches away from their home bivouac in a column formation that, in some species, can bifurcate multiple times to form large branching structures. Foragers from the column flush out insect prey or invade the nests of other social insect to take their brood. They retrieve their prey to the bivouac along the same foraging column (Photo credit to Geoff Gallice)
So, despite the similarity between these raiding groups and a human military column, none of the individual ants is an “army of one.” Each raider is entirely dependent upon being a part of the raiding team. Consequently, several species of ants that are the victims of army ant raids have evolved a simple but effective defense—evacuate, disperse, wait for the invasion to end, and then move back into the original nest (Lamon and Topoff 1981; Smith and Haight 2008). For army ants that specialize on other ant colonies, a successful raid depends on prey being densely concentrated and is largely ineffective when a target colony disperses. A particularly dramatic (although somewhat artificial) illustration of individual army ant ignorance is the formation of so-called “circular mills.” This can occur when the head of a foraging column is induced to double back and encounter its tail, leading the ants to rotate continuously in a circle until they either die of exhaustion or escape the mill (Schneirla 1944; Brady 2003; Delsuc 2003). These mills reflect the ants’ total dependence on following the chemical trails laid by preceding ants. Their lack of any other navigational mode prevents them from realizing that they are moving in circles or that the chemical signal they are following was actually deposited by the ants that are following them.
Ignorance as Enforced Independence
It may be tempting to suggest that less-ignorant army ants would make for more successful colonies that are immune to prey evacuations and deathly ant milling. However, in other ant species where it is easier to test the connection between the individual and the colony, ignorance has been shown to be adaptive. The underlying reasons are related to the requirement of independence among group members for the “Wisdom of Crowds” (Surowieckie 2004), as discussed in the Algorithms portion of this book. Ants of the genus Temnothorax (Fig. 15) are very small crevice dwellers that can be induced to migrate into a credit-card-sized artificial nest consisting of a cavity in a balsa wood slat sandwiched between two microscope slides. When a homeless Temnothorax colony is given the choice of several artificial nests, it will reliably choose one based on a variety of criteria (Visscher 2007), including entrance size (smaller is better) and cavity illumination (darker is better). This colony-level choice does not depend on individual ants visiting all options and comparing them. It emerges instead from a decentralized process that aggregates the assessments of many scouts, few of which visit multiple sites (Pratt 2005a). However, when a single ant is isolated and required to make this choice on her own, she is capable of doing so (Sasaki and Pratt 2011, 2012). This makes it possible to compare the decision-making performance of individual ants and whole colonies. For example, Sasaki and Pratt (2011) showed that individuals are vulnerable to the “decoy effect”, a form of irrational decision making. This effect is well known in humans, where it is evoked in the presence of two target options that pose a trade-off between important attributes. If a third “decoy” option is added that is clearly inferior to only one of the two targets, it can greatly increase the preference for that target, even though the decoy itself is never chosen. Sasaki and Pratt found that individual ants were strongly influenced by the decoy, but colonies were immune to its effect. This immunity is potentially important to colony fitness, as sensitivity to irrelevant decoys is not consistent with a decision maker maximizing fitness.

Painted Temnothorax rugatulus ants next to an artificial nest consisting of balsa wood sandwiched between two microscope slides; the second ant from the left is holding a brood item in her mandibles. A colony of several hundred Temnothorax ants may reside in a crevice formed from a hollow acorn or a small crack in a rock. Under a microscope, the ants can be immobilized and painted with four color marks so that individuals can later be uniquely identified during behavioral experiments. Consequently, their small size allows for detailed observations of how individuals contribute to colony-level decisions. In the past, Temnothorax ants were classified in the genus Leptothorax, which is the name used to refer to them in the Foundations section of this book (Photo credit to Takao Sasaki and James S. Waters)
The key advantage of colonies over isolated ants appears to be the relative ignorance of individuals in the colony setting. Because each worker visits only one site, this ensures that option assessment is truly independent, a basic requirement for the Wisdom of Crowds. A lone ant, in contrast, must do all of the cognitive work of comparing multiple options that vary discordantly in several attributes. To do so, she likely relies on simplifying decision heuristics that work most of the time but leave her vulnerable to systematic errors like the decoy effect. In the colony setting, comparison is distributed over all of the colony’s scouts, thus relieving any single ant of the burden of processing all available information.
This burden sharing also allows colonies to handle more data than a single ant can. When presented with a simple choice between one good and one poor nest, colonies and individuals are similarly effective at choosing the better option Sasaki and Pratt (2012). When the challenge is increased by presenting eight candidate nests—half good and half poor—colonies continue to do well, but individual performance plummets to no better than random. In humans, this effect is known as “cognitive overload”—the ability to make a good choice is impaired by the number of choices. For individual ants, the problem appears to be that they attempt to process more information than they have the cognitive capacity to handle. For whole colonies, the distributed process of nest-site choice reaches a conclusion before many individual ants have had time to visit more than one or two sites. Thus, although lone individuals have the ability to directly compare multiple options and choose between them, that ability is significantly less effective than the decentralized process that aggregates assessments of individuals that have only experienced one option. The colony’s collective wisdom emerges from individual ignorance.
A similar advantage of individual-level ignorance is seen in nest-site selection by honeybees (Visscher 2007; Seeley 2010) and may be a general feature of collective decision making by insect societies. Thus, it appears that the evolution of eusociality has led to a decrease, not an increase, in individual awareness. Likewise, advances in Human Computation may ironically correspond to a reduction in the role or awareness of each individual involved in the computation. For example, the reCAPTCHA system acquired by Google in 2009 (Google 2009) coerces large teams of humans to unknowingly digitize books, street numbers, and other images of text while simultaneously verifying to a third party that they are human. The system works by presenting two images of text, one of which is a known word that has been obscured and another that is unknown text taken from some source of interest to Google. In order to gain access to the third party, the human has to properly input the known text; however, because she does not know which field is her entry key, she is forced to also lend her computational skills temporarily to Google. The system capitalizes on the ignorance that comes about through her lack of awareness. Like the decentralized Temnothorax colony that makes a decision too quickly for any scout to visit multiple candidate nest sites, the system is designed to prevent her awareness from impeding the progress of the distributed computation.
Automatic and Ubiquitous Collective Computation: Global Brains
This notion of distributed ignorance is also consistent with the emergence of self-selecting computations discussed in section “Oligogyny and Leaderlessness: Competitors that Share the Same Workers” and earlier in this chapter. For example, as the level of automatic electronic personal instrumentation increases via smartphones or Internet-enabled automobiles, unprecedented amounts of data about the current state of the world will be immediately available to very wide audiences. Software applications are already being developed for augmented-reality devices (introduced in the Techniques and Modalities section of this book). These devices effectively implement artificial sensory modalities that allow real-time perception of aggregated data (Jenkins 2013), like seeing a virtual “chemical trail” recording the history of pedestrian traffic on real pavement.
How to induce humans to use these technologies is discussed in detail in the Participation section of this book. It would not be unprecedented for games developed today to lead to more practical applications afterward. It would also not be surprising if HC applications could be disguised as games, especially if those applications are motivated by noble causes, like scientific exploration. Moreover, either due to mechanism design (Mas-Colell et al. 1995; Osborne and Rubinstein 1994; Feigenbaum and Shenker 2002) that rewards participation or just because of convenience, there may be an emergence of always-on software that continuously samples aspects of the environment and relays anonymous data to a network of others using that software. In fact, something similar already occurs as smart phones gather and aggregate traffic data from their mobile hosts; this data collection certainly goes on while navigation applications are running, but it may also occur at other times by always-on social-networking applications that automatically “check in” periodically (e.g., Google Latitude, Foursquare). In such systems, data sources are ignorant of how their data are used by various consumers. Moreover, normally accepted principles of locality are violated as individuals make decisions primarily based on stimuli from far-flung sources. As these individuals make decisions in parallel based on related data, the group as a whole appears to make colony-like aggregate decisions that may share properties with how Temnothorax colonies choose a new nest.
The result is not unlike the HC-induced “global brain” that is discussed in the opening chapter of this section of the book. However, there is an important difference between a global brain and a real brain, in terms of the independence of their constituent parts. Although the brain appears to be a decentralized collective of neurons, its parts are physically co-located. So there are added difficulties in ensuring that the real brain aggregates truly independent assessments. A global brain, on the other hand, is like a Temnothorax colony whose scouts each see only one of many candidate nests. Like the ants, the decentralized agents within these global brains are forced to make independent assessments. Consequently, they may be qualitatively superior to real brains, because they can aggregate independent assessments of parallel aspects of a challenging problem and thus avoid the cognitive traps associated with non-independence.
There are negative as well as positive consequences to automatic collective computation. For example, augmented-reality devices may help people with similar interests synchronize in time and space so that it is easier for them to meet. However, these devices may also allow for unrelated criminals interested in robbing the same bank to find each other and pool resources. Even if such a team does not formally meet, the augmented-reality traces that accumulate in the shared paths that they travel may help any one of them to find vulnerabilities more easily. Moreover, because distributed information persists over time and coordination is implicit, there will be little ability to detect any deleterious shared computation until after the bank is robbed. In fact, researchers funded by law enforcement agencies are already using fictitious games in MTurk (Amazon.com, Inc. 2005) to accurately characterize human deviations from rationality (Yang et al. 2012). These data are then used to build random patrol schedules that minimize the probability that a watchful adversary will be able to game the schedule and smuggle contraband into sensitive areas. It seems inevitable that criminal organizations will someday use the same methods to design optimal adversarial schedules to maximize patrol vulnerabilities. At the moment, marketplaces like MTurk are bottlenecks for gathering the requisite data for such research. However, as Human Computation becomes decentralized, it is not clear how to control access to its potential. Superorganisms are marvels of nature, but they can also be invasive pests.
When Ants Fail
One of the best-known instances of collective decision making in ants is pheromone-trail following, which is also discussed briefly in the Foundations section of this book. This behavior has inspired a trail-laying-inspired metaheuristic optimization algorithm known as Ant Colony Optimization (ACO) (Bonabeau et al. 1999; Birattari et al. 2002; Dorigo et al. 2006). While ACO mimics ant chemical signaling within simulated parameter spaces, roboticists have gone further and implemented true chemical-trail following on mobile robots (e.g., Sharpe and Webb 1996; Svennebring and Koenig 2003; Fujisawa et al. 2008). Not surprisingly, software applications currently in development for augmented-reality systems achieve collective network computation by some form of simulated trail laying meant to induce human agents to behave like the virtual ants in an ACO algorithm (e.g., Jenkins 2013). Despite its inclusive name, ACO caricatures only a subset of ants found in nature. Moreover, natural trail-laying has been tuned by natural selection for specific environments. When trail-laying ants are induced to complete tasks under laboratory conditions that differ from their natural environment, colonies can fail to make good decisions. These failures not only highlight weaknesses of distributed decision making via trail laying, but they show that complex systems in general can be maladaptive and need to be specially tuned for particular contexts. In this section, we also describe how other ants have evolved decentralized behaviors to solve similar problems without the use of chemical trails. These alternatives have their own strengths and weaknesses. Thus, there is much to be learned from mixing different decentralized strategies when appropriate. In general, the future success of widespread Human Computation will likely come from architectural diversity and not hegemony.
Collective decision making based on pheromone trails is well illustrated by the foraging behavior of the Pharaoh ant (Monomorium pharaonis; Fig. 16a). When a scout finds food, she recruits other ants to it by laying a chemical trail back to the nest (Hölldobler and Wilson 1990; Sumpter and Beekman 2003). Recruits follow this trail to the food and may reinforce it by adding more pheromone, with a strength that depends on the quality of the food source. Reinforcement makes the trail still more attractive to further recruits, generating a positive feedback loop. If trails are laid to multiple food sources simultaneously, the colony’s foragers will eventually concentrate on a single trail to the best source (or a randomly chosen one if sources do not vary in quality). This happens because ants have a threshold-like response to pheromone concentration that amplifies even small differences in attractiveness between trails. The pheromone also decays over time so that trails to less competitive sites eventually fade away. Moreover, the same process leads the ants to settle on the shortest path between the nest and the best food source (Beckers et al. 1990; de Biseau et al. 1991; Beckers et al. 1992a,b; Camazine et al. 2001). This process has inspired methods for solving optimization problems that must pick the best of a wide variety of parameter combinations. Simulated ants move around the parameter space and leave virtual trails according to the subjective value of the parameters discovered. The simulated recruitment process prioritizes search effort so as to maximize the chance of finding the optimal parameter combination without having to test all possible combinations (Dorigo et al. 1996, 1999; Bonabeau et al. 1999; Birattari et al. 2002; Dorigo et al. 2006).

Monomorium ants. The genus Monomorium is diverse and widespread. The small (2 mm) ant in (a) is a typical Pharaoh ant (M. pharaonis), a worldwide indoor pest species that has spread from tropical to temperate zones by human commerce. The slightly larger and considerably more colorful Australian M. rubriceps is shown in (b). Although it is generally uncommon in ants (Heinze and Keller 2000), M. rubriceps and some other Australian Monomorium species (but not M. pharaonis) can produce both winged and wingless “intermorphic” queens from the same colony (Fersch et al. 2000; Buschinger 2011) (Photo credits to: Julian Szulc (Szulc 2011) (photo (a)); Steve Shattuck (photo (b)))
A distinguishing characteristic of trail following is that it is decisive; it is pathologically rare for trail-following process to come to a split decision, and this property holds for both the differential-equation models of trail following as well as real ants foraging in controlled experiments (Sumpter and Beekman 2003). Even when there is only a small difference in quality between options, trail following coalesces on one option relatively quickly. However, as the difference in quality between options becomes small, the outcome of the decision becomes more reliant on the initial bias in the scouting team than on the actual quality difference between options. That is, the decision becomes a social cascade driven by popularity rather than the efficient independent assessment discussed in the Algorithms section of this book.
Consequently, trail-following ants are poor at adapting to changing environments (Beckers et al. 1990; Nicolis and Deneubourg 1999; Camazine et al. 2001). If given two feeders of equal concentration, they will randomly commit to one of them and will be locked into that choice until the colony satiates and foraging stops. Not only will the colony be ignorant of any augmentation of other feeders, but it will be unable to quickly adapt to reductions in quality at its chosen feeder due to inevitable depletion effects. Consequently, classical trail following is not suitable for all environments. The success of simulated trail following in optimization problems is in great part because the value landscape over the parameter space is fixed over time. If trail following was used via Human Computation to, for example, find the least crowded restaurant in a city, the collective choice could quickly become the most crowded restaurant before negative feedback could re-allocate incoming diners to another option.
Of course, trail-laying algorithms can be altered to reduce the chances of such deleterious positive-feedback popularity cascades. In fact, it has recently been discovered that the trail-laying big-headed ants (Pheidole megacephala) can adaptively track changes in feeder quality during experiments (Dussutour et al. 2009). Moreover, the temporal characteristics of the shift in foraging allocation after a change in feeders are captured by a model that adds a certain amount of noise to each scout’s choice of foraging route. The added noise ensures that a significant fraction of scouts continues to visit apparently suboptimal sites. If this pool of uncommitted scouts is sufficiently large, it can dislodge a highly reinforced trail so that the colony can switch to a site that gains comparative advantage over time. However, the optimal level of noise varies with how frequently the environment changes. So even this improved trail following must be specially tuned for each environment.
Ants are a diverse group, and many species rely on recruitment methods very different from pheromone trails. These other methods can also support collective decision making but can lead to different decision dynamics and outcomes. For example, the Temnothorax ants described in section “Individual Ignorance Reduces Collective Cognitive Overload” use “tandem running” to recruit to rich food sources or potential new homes (Franks and Richardson 2006; Hölldobler et al. 1974; Pratt 2005b). In a tandem run, a successful scout individually leads a single follower from the nest to the target location (Fig. 17). In particular, after finding food, a forager returns to the nest and releases a “calling” pheromone (Möglich et al. 1974) that usually attracts a single follower. The leader–follower pair then leave the nest together. The leader moves toward the discovered food by roughly a body length and then stops and waits for the follower to make physical contact with her rear end. Meanwhile, the follower usually sweeps her head from side to side as she closes the distance between her and the leader. Once she touches the leader, the process repeats until both reach the food item. At that point, one or both of them can return to the nest and start a new tandem run. However, after the tandem run, the two ants may take different paths back to the home nest, and future visits to the food item by either ant may be along different paths.
The resulting colony-level behavior is qualitatively different from trail following in a number of ways. Whereas unanimous agreement is expected in trail laying, tandem running can support persistent non-trivial allocations of foragers across multiple food items. This property is because tandem runs do not have the same step-like increase in effectiveness with recruitment effort that is seen in pheromone trails. The strongly non-linear relationship in pheromone-trail recruitment magnifies small chance differences in exploitation, driving the ants toward exclusive use of only one option—the option with the strongest trail. The effectiveness of tandem runs, on the other hand, is linear in recruitment effort; as long as there is a pool of potential recruits at the old nest, each additional tandem run is expected to increase the arrival rate of new ants by the same amount. So when multiple food sources are discovered, there is exploitation of all of them. Furthermore, if the probability of initiating tandem runs depends on food quality, the colony will distribute its foraging force across the food sources according to their quality (Shaffer et al. 2013). For similar reasons, tandem running can adapt more quickly to changing environments, such as the discovery of a good food source after the colony has already begun exploiting a mediocre one. In this situation, trail-laying ants may be trapped by their already established trail, which will outcompete any nascent trail at the new source (Beckers et al. 1990; Detrain and Deneubourg 2008). Tandem runs, on the other hand, can always divert some foraging effort to the new source, initiating a process of positive feedback that will eventually overtake the original source (Shaffer et al. 2013).

Temnothorax rugatulus during a tandem run. Here, the leader (right) waits for her follower (left) to make physical contact. At that point, the leader moves forward a small distance and repeats the process until both ants reach the destination of interest (i.e., a candidate nest site or an item of food). The leader can make her presence known to the follower through chemical communication, but chemical trails are not used for navigation. Moreover, both the leader and the follower may take different paths on subsequent visits. Thus, the destination is encoded within the “memory” of each ant (Photo credit to Takao Sasaki and James S. Waters)
Thus, tandem running is a dynamic resource allocation strategy adapted for simultaneous exploitation of multiple foraging sites. In optimization heuristics inspired by trail laying, regions of the parameter space are virtually stained in a way that is globally visible, yet decaying. That globally visible staining is able to re-prioritize the search for the best set of parameters. With Human Computation in mind, tandem running is analogous to re-distributing a pool of human computers among a set of problems based on need. As was discussed in the Infrastructure and Architecture section of this book, humans may be viewed as computational resources that need to be allocated efficiently to different problems. Problems that have high computational need should lead to more recruitment of additional help. However, rather than sending a global advertisement to attract large increases in work force, a random individual could be selected for a single advertisement, with the probability of delivering the advertisement increasing with some local measure of the need for additional help. So rather than the problem with the greatest need taking all of the computational resources, as in the trail-laying process, computational resources are allocated to all problems simultaneously and are proportioned according to need.
As discussed in section “Individual Ignorance Reduces Collective Cognitive Overload”, Temnothorax colonies frequently have to choose the best of a set of candidate nests. This task is not well suited to a resource allocator like tandem running by itself. When its nest is destroyed, the colony has to assess the relative quality of new candidate homes and then move the colony into the single best one. This assessment process is similar to a foraging task as it requires scouts to search the environment for different opportunities. During the initial assessment process, scouts make use of tandem running to gradually allocate the scouting team to different nests in proportion to nest quality. In order to convert this distribution into consensus on a single site, the ants add a non-linear component in the form of a quorum rule. As soon as one site achieves a minimum number of adherents, its scouts switch from slow tandem runs to faster direct transports (Fig. 18) (Pratt et al. 2002; Pratt 2005b). In this recruitment method, the scouts repeatedly travel to the old site and use their mandibles to lift up nestmates (including brood items and the queen) and rapidly carry them to the new nest. This switch accelerates migration, allowing the colony to move into the first site to reach a quorum before any other site has done so. The chosen site is likely to be the best one, because the tandem-run phase apportions scouts according to site quality. Thus, reliance on a quorum rule increases the likelihood of consensus on the best site. By using this rule contingently, colonies can match decision outcomes to context, achieving either consensus or allocation as appropriate to each setting (i.e., nest-site selection and foraging, respectively). The decentralized decision-making processes in future Human Computation systems may similarly need to optimally mix different kinds of linear and non-linear recruitment for different contexts so that computations are sufficiently fast, able to respond to environmental changes, and robust to individual errors.

Social transport by Temnothorax rugatulus. Transports bring the bulk of the colony to its new home during colony emigration. Once an ant begins transport to a site, she ceases to lead tandem runs there. Carried ants are generally the in-nest workers and brood that do not travel on their own outside the nest and will not be able to return to the old site. Thus, the switch to transport marks the “commitment” of a scout to the candidate site. In (a), a committed scout near the entrance of its old nest initiates transport with another ant who reciprocates by adopting a position suitable for being carried. In (b), the pair are shown moving away from the old nest toward the new nest (Photo credit to Takao Sasaki and James S. Waters)
A Diversity of Unforeseen Futures
In this chapter, we have attempted to establish parallels between Human Computation and eusociality so as to speculate about a future human superorganism that emerges via HC. Given the tremendous diversity in the social insects, it is clear that we have left a great deal out. A few notable omissions include:
- Division of labor::
-
We have not discussed how the division of labor within worker castes is established and maintained (Beshers and Fewell 2001; Gordon 1996; Hölldobler and Wilson 2009; Richardson et al. 2011; Dornhaus et al. 2008; Robson and Beshers 1997; Calderone and Page 1996; Tofts and Franks 1992). A variety of ants have distinct morphological castes specialized for different tasks (Hölldobler and Wilson 1990, 2009). These polymorphic ants include the army ants described in sections “Leveraging Diversity in Large, Long-Lasting Projects” and “Individual Ignorance Reduces Collective Cognitive Overload”, the carpenter ants described in section “Oligogyny and Leaderlessness: Competitors that Share the Same Workers”, the widespread Pheidole genus (Fig. 19), the leaf-cutter ants (Atta; Fig. 20) described below, and the well-known fire ants (Solenopsis; Fig. 21) (Hölldobler and Wilson 1990, 2009; Tschinkel 2006). As already mentioned in the Foundations section of this book, even in species without physical polymorphism, individual workers show strong tendencies to specialize on particular tasks (Beshers and Fewell 2001; Hölldobler and Wilson 2009). Moreover, a worker may change her specialization as she ages (Franks and Tofts 1994; Hölldobler and Wilson 2009; Tofts and Franks 1992; Calderone and Page 1996; Schofield et al. 2011; Tripet and Nonacs 2004). Polymorphism, workforce symmetry breaking, and age-induced changes in specialization are all issues that could be relevant to a future with widespread Human Computation, and there is much research into the mechanisms that drive this so-called “polyethism” in social insects. For brevity, we focus here on “age polyethism,” the age-related division of labor. There are several possible mechanisms that explain how these temporal changes may occur in social insects, and similar mechanisms might be found in HC systems. For example:
-
Developmental programs may trigger age-related changes in worker behavior (Calderone and Page 1996). Similarly, a human teenager emerging from adolescence will experience neural or hormonal changes that may lead to a shift in digital behavior. Thus, some age-related division of labor in HC systems may be a shadow of the human developmental program. This program has been shaped by natural selection, and so it is tempting to consider whether a future with ubiquitous HC could act as an additional selective pressure on human development.
-
Age-related changes in specialization may also be driven by fatigue. For example, as leaf-cutter ant mandibles wear, the workers switch to carrying the leaf fragments cut by workers with sharper mandibles (Schofield et al. 2011). Likewise, if a complicated visual classification task is distributed across a bank of human classifiers, individuals that specialize on small features may have to shift to different tasks after years of eye strain.
-
Alternatively, shifts in task preference may be an emergent property (Franks and Tofts 1994; Tofts and Franks 1992). Tasks in a typical ant colony have an orderly spatial distribution, with nursing taking place at the brood pile near the nest center, food processing just outside the center, nest maintenance and defense at the periphery, and foraging outside. Ants always start their adult life on the brood pile. If they follow a simple rule of always moving away from the center when they perceive a lack of available work, then they will tend to follow a task sequence that mirrors the spatial layout of tasks in the nest, with brood care at the start and foraging at the end. Similarly, if workers can select different HC applications from a relatively static list on an application marketplace, the newest workers will likely choose the most popular applications near the top of the list. With their entry, the workers already engaged in those applications will detect less work availability. Some of those experienced workers will then switch to less well-known applications from farther down on the popularity list. This process will yield a division of labor based on the amount of experience with the system. If these HC systems become widespread and adopted for life starting at an early age, the most experienced human computers will also be the oldest. Consequently, there will be an age-related division of labor driven not by developmental program but by the dynamics of work availability.
Age polyethism is complex and likely results from a mixture of causes (Tripet and Nonacs 2004). In general, HC system designers should be cognizant of the expected demographics of their workforce. Moreover, to account for developmental changes, task-allocation strategies should be adaptable based on the performance of each individual.
Fig. 19 
Pheidole ants. The genus Pheidole is widespread and diverse. Most species have two distinct worker classes-“minor” and “major” workers. The major workers have distinctively large heads; their large mandibles are used in colony defense or to break up large pieces of food. (Photo credits to Steve Shattuck)
Fig. 20 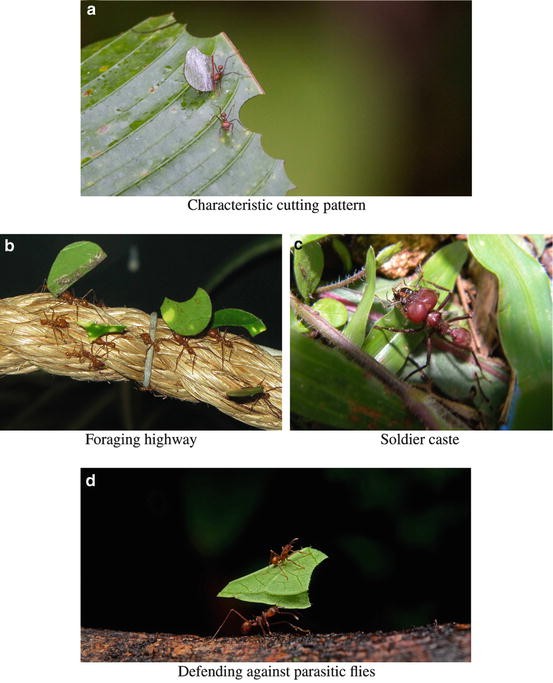
Leaf-cutter ants (Atta cephalotes). One of the several castes of leaf-cutter ants uses its sharp mandibles in a scissor-like motion to cut leaves in the pattern shown in (a). These leaves are then carried back along foraging highways, like the one in (b). When the leaves reach the colony, they are used to nourish a fungus garden that grows inside the ants’ nest. The ants then feed on the fruiting bodies produced by the fungus. The fungus grown by leaf-cutter colonies is not found elsewhere in nature; it is a monoculture passed down from mother colony to daughter alate, and the ants maintain its health with by applying chemicals similar to pesticides in human agriculture. Unlike the big-headed Pheidole solders, leaf-cutter solders like the one in (c) aggressively defend the colony. Additionally, as shown in (d), workers of the smallest caste ride on top of leaves and defend against parasitic flies that can lay eggs within the body of the otherwise vulnerable ant carrying the leaf. Leaf-cutter ants also aggressively fight their own trash-handling workers to prevent them from re-entering the nest and contaminating the fungus (Hart and Ratnieks 2001). While some of the Camponotus ants discussed earlier are called “ranchers” due to their management of aphid herds, fungus-growing ants like these are sometimes called “farmers” (Photo credits to: Matt MacGillivray (photo (a)); Adrian Pingstone (photo (b)); Maximilian Paradiz (photo (c)); Geoff Gallice (photo (d)))
Fig. 21 
The red imported fire ant (Solenopsis invicta). Originally from South America, this ant has become a worldwide pest. They are highly invasive, predatory, and can damage agricultural crops either by injuring plants or by killing natural pollinators. A resilient species, they can form large floating colonial rafts to withstand floods (Anderson et al. 2002; Haight 2006; Mlot et al. 2011) (Photo credit to Scott Bauer)
-
- Trophallaxis::
-
Although we discussed peer-to-peer software briefly, we did not highlight its possible relationship with trophallaxis in social insects. Trophallaxis is the direct transfer of food among colony members (Wheeler 1918), and it may serve a variety of different functions. For example, many colonies have a high number of apparently inactive workers who are sustained with food shared by their nestmates (Dornhaus et al. 2008; Gordon 2010). Their function, if any, remains unclear, but they may serve as a labor reserve. Likewise, a given HC workforce might retain more workers than are generally necessary, to deal with occasional bursts of high demand. If workers are rewarded only when immediately productive, then a buffer of idle workers will not be sustainable, as the unrewarded workers will leave the pool. The longevity of the project might be reduced if large bursts of work cannot be effectively dispatched, and so it is in the interest of the workers that are consistently receiving rewards to share some of those rewards with idle workers. These peer-to-peer incentive transfers are a kind of HC trophallaxis, and they help to artificially inflate the standing workforce so it is better equipped to handle occasional bursts of work. Alternatively, the work itself can be the substance moving via HC trophallaxis between workers. If the task received by one worker can be partitioned and re-distributed, then many workers are able to stay active at one time while keeping the system well under its total capacity.
- Interaction networks::
-
Additionally, we have not given adequate attention to how networks and interaction rates regulate behavior in a social-insect colony (Bonabeau et al. 1998; Fewell 2003; Gordon et al. 1993, 2008; Pinter-Wollman et al. 2011; Pratt 2005b; Gordon 2010; Waters and Fewell 2012). Much of the decentralized ability of colonies to complete tasks is regulated by topological and temporal properties of networks of interacting workers. Simple behavioral rules based on interaction rates can explain much of the self organization observed in social-insect colonies. These rules and structures can serve as inspiration for building HC networks that have sufficient potential for a phase transition into superorganismic computation. For example, notable similarities exist between the social graphs of ant colonies and natural regulatory networks (Waters and Fewell 2012). In fact, ant network topology shares more in common with biological regulatory networks than with social networks. Consequently, when designing networks to facilitate HC, it may be a mistake to catalyze connections along social directions; efficient computation might be better assisted by enforcing regulatory network motifs.
- Traffic patterns and flow control::
-
In sections “Individual Ignorance Reduces Collective Cognitive Overload” and “When Ants Fail”, we discussed how ants make use of trails for navigation and recruitment. As hinted in the Foundations section of this book, ant trails and traffic management on them is a much richer topic than we have presented here, and aspects we have not discussed could potentially provide useful inspiration for protocols that facilitate future Human Computation. For example:
-
Trail-laying ants like Leptogenys processionalis and the marauder ant Phe-idologeton diversus have characteristic branching patterns in their foraging trails (Fig. 22) (Ganeshaiah and Veena 1991; Moffett 1988). These bifurcation patterns are non-random and may result from the finite range of chemical communication between foragers (Ganeshaiah and Veena 1991). The resulting topological pattern seems to be an efficient structure for exploring a large area with relatively short total trail length. Trail-inspired search heuristics might be informed by these branching patterns. Moreover, the putative mechanism that forms these trails shows again how an apparent limitation (i.e., finite communication range) is adaptive when tuned to generate useful patterns.
-
Leaf-cutter ants (Atta; Fig. 20) build elaborate and well-maintained highway systems on which they transport leaves to feed their underground fungus gardens. As the highways connect the central nest directly to cutting sites on trees, they have a natural branching pattern. Consequently, these ants have developed leaf flow-control mechanisms that depend on first saturating the highway with unloaded workers. Outgoing ants choose whether to carry leaves back to the nest based on their interaction rate with loaded incoming ants; these rules help to regulate leaf flow despite variation in highway branch width (Burd 2000; Dussutour et al. 2004; Farji-Brener et al. 2010; Fourcassié et al. 2010). These mechanisms demonstrate how even the idle workers in a decentralized system may actually serve an information-related purpose.
-
- Polydomy: :
-
Given that Human Computation will likely be distributed over a large geographic area, investigations of “polydomy” in ants may be relevant to understanding future HC systems. Polydomy, or occupation of multiple nest sites by a single colony (Partridge et al. 1997; Schmolke 2009; Hölldobler and Carlin 1989; Smith et al. 2011), is also discussed in the Foundations section of this book. Polydomy presents a number of interesting problems in decentralized control. For example, colonies of Aphaenogaster cockerelli (Fig. 23) have only one queen but typically occupy multiple nests. If the queen dies, workers respond to her absence by developing their ovaries and laying eggs that produce alate males (Hölldobler and Carlin 1989; Smith et al. 2011). To suppress worker reproduction while she is alive, the queen somehow signals her presence to workers in all of the colony’s nests, even though she can only reside in one of them. How she does so remains unknown.



The benefits of polydomy itself are not well understood, but there is some evidence that it increases colony foraging success (Schmolke 2009). This explanation appears to parallel how an Internet Content Distribution Network (CDN) improves the quality of service delivered to an audience dispersed around the globe. In particular, if food is randomly scattered throughout an environment, foragers in a polydomous colony face a lower transport burden than a monodomous colony. Just as a CDN distributes content so it can be close to consumers, a polydomous colony distributes its nests so they can be close to their food sources. Likewise, HC systems may need a similar dispersion to facilitate parallel clusters of co-located human computers. Within each subnetwork, human participants will have fast access to the data being processed as well as to their peers in the network. In fact, Internet gaming communities and high-speed stock-market flash traders already show some signs of polydomy-like optimization to maximize efficiency. Moreover, teams of co-located humans that have direct physical access to data may be the natural HC extension of a co-located server farm sharing direct access to an important resource.
As more HC projects compete for human computational talents, there may be additional lessons to learn from polydomy. The polydomous ant Aphaenogaster cockerelli is also known to form teams that collectively retrieve large food items (Hölldobler et al. 1978; Berman et al. 2010, 2011; Kumar et al. 2013). They can form these teams by recruiting local assistance (i.e., they need not return to the nest to form a carrying team) (Hölldobler et al. 1978). Doing so allows more rapid retrieval of large prey than the alternative method of cutting it up in place and retrieving the pieces. Combined with polydomy, which ensures shorter transport distances, this strategy may reduce the time prey spends above ground where it can be captured by competitors. Rather than comparing humans in an HC-system to individual ants, it may be useful to think of the humans as the prey items being collected by the HC colonies. If humans self subscribe to different HC projects that have tasks that are disguised as on-line games with rewards that improve with decreasing delay, then it will be in the best interest of the HC-organizer to distribute multiple “nest entrances” nearest to potential sources of HC talent. Otherwise, competing projects will better attract the attention of the self-assorting human computers.
It is not possible for one chapter to completely capture the rich set of social insect model systems for a variety of distributed phenomena. We have leveraged this great diversity as a bank of examples that each might represent one particular future of Human Computation. However, like modern social-insect fauna, it is more likely that a wide variety of different kinds of HC will co-exist simultaneously. The resulting computational ecosystem is difficult to picture.

Characteristic fork in a foraging trail of Leptogenys (Photo credit to Steve Shattuck)

Aphaenogaster cockerelli. This ant is feeding on fig paste that has been presented during an experiment in the field. The orange coloring on her head, body, and legs is paint that has been applied to track her nest origin during the experiment. Historically, Aphaenogaster cockerelli was called Novomessor cockerelli (Photo credit to Jessica D. Ebie)
Such a future might be beyond the “technological singularity” predicted by the futurist Kurzweil (1999). He suggests that after some point in time, humans will “transcend biology” (Kurzweil 2005) and create computers that “exceed human intelligence” (Kurzweil 1999). In some ways, this vision is consistent with the superorganismic phase transition we described at the start of section “Future Human Imitations of Eusocial Insect Society”, albeit the imagery seems to be more abrupt than the continuous higher-order phase transition that we picture. The fuzzier transition that we described is more in line with the “mitochondrial singularity” recently suggested by microbiologist Slonczewski in order to predict the role of humans in a post-singularity world (Ghose 2013; Slonczewski 2013a,b). As we look to the evolution of eusociality for lessons, she looks to the evolution of the mitochondria within our cells. These organelles have the highly specialized task of providing power to each cell, but their ancestors were once free-living bacteria that performed all of the general functions of a living cell. Eventually, some of those ancestral bacteria managed to embed themselves within another free-living cell, and the pair became symbiotic partners. Gradually, the mitochondrial ancestors gave up their other roles and became a specialized organelle. Nevertheless, mitochondria today retain some of their past identity – each one contains its own separate DNA and is passed directly from mother to offspring without any modifications outside of the occasional random mutation. Slonczewski pictures a similar fate for humans – as humans augment their abilities with computers, the result is a symbiotic relationship. However, if computer intelligence eclipses that of humans, the human side of the symbiosis will gradually lose its intellect in favor of specializing on other support functions.
When focusing on a future driven by Human Computation, the Kurzweil–Slonczewski picture seems lacking because it neglects the fact that aggregate digital intelligence may largely depend on synergistic connections between ignorant but still cognitive individuals. Thus, we think it is informative to look to recent work of astrobiologists like Walker et al. to re-define life in terms of its information processing ability (Walker et al. 2012; Walker and Davies 2013). In their view, the transition from non-living collections of particles to a living aggregate must go through a corresponding transition from bottom-up causality to top-down causality. That is, before the transition, the aggregate behavior is a simple combination of independent actions by the constituents; causality points “up” from local to global. After the transition, the behaviors of the constituents lose much of their independence and instead are clearly responsive to signals found in the aggregate; causality points “down” from global to local. When we consider the co-existence of multiple forms of HC that each compete for humans to participate in the computation, the humans seem less like workers in an ant colony and more like morsels of food that are the prizes in competitions between multiple co-existing colonies. As humans transition from independent engines of computation to digital nutrients for computational networks, it seems as if HC goes through a corresponding transition from bottom-up to top-down causality. Humans will not be the mitochondria of this post-singularity world. Instead, they are digital food that sustains emergent decentralized artificial life.
References
Amazon.com, Inc. (2005) Amazon mechanial turk. http://www.mturk.com/
Anderson C, Theraulaz G, Deneubourg JL (2002) Self-assemblages in insect societies. Insectes Sociaux 49(2):99–110. doi:10.1007/s00040-002-8286-y
André JB, Peeters C, Doums C (2001) Serial polygyny and colony genetic structure in the monogynous queenless ant Diacamma cyaneiventre. Behav Ecol Sociobiol 50(1):72–80. doi:10.1007/s002650100330
Baratte S, Cobb M, Peeters C (2006) Reproductive conflicts and mutilation in queenless Diacamma ants. Anim Behav 72(2):305–311. doi:10.1016/j.anbehav.2005.10.025
Beach CB, McMurry FM (eds) (1914) The new student’s reference work for teachers, students and families. FE Compton, Chicago
Beckers R, Deneubourg JL, Goss S, Pasteels JM (1990) Collective decision making through food recruitment. Insectes Sociaux 37(3):258–267. doi:10.1007/BF02224053
Beckers R, Deneubourg JL, Goss S (1992a) Trail laying behaviour during food recruitment in the ant Lasius niger (L.). Insectes Sociaux 39(1):59–72. doi:10.1007/BF01240531
Beckers R, Deneubourg JL, Goss S (1992b) Trails and U-turns in the selection of a path by the ant Lasius niger. J Theor Biol 159(4):397–415. doi:10.1016/S0022-5193(05)80686-1
Berman S, Lindsey Q, Sakar MS, Kumar V, Pratt SC (2010) Study of group food retrieval by ants as a model for multi-robot collective transport strategies. In: Proceedings of robotics: science and systems, Zaragoza
Berman S, Lindsey Q, Sakar MS, Kumar V, Pratt SC (2011) Experimental study and modeling of group retrieval in ants as an approach to collective transport in swarm robotic systems. Proc IEEE 99(9):1470–1481. doi:10.1109/JPROC.2011.2111450
Beshers SN, Fewell JH (2001) Models of division of labor in social insects. Annu Rev Entomol 46:413–440. doi:10.1146/annurev.ento.46.1.413
Bhadra A, Gadagkar R (2008) We know that the wasps ’know’: cryptic successors to the queen in Ropalidia marginata. Biol Lett 4(6):634–637. doi:10.1098/rsbl.2008.0455
Bhadraa A, Iyera PL, Sumanaa A, Deshpandea SA, Ghosha S, Gadagkar R (2007) How do workers of the primitively eusocial wasp Ropalidia marginata detect the presence of their queens? J Theor Biol 246(3):574–582. doi:10.1016/j.jtbi.2007.01.007
Birattari M, Di Caro G, Dorigo M (2002) Toward the formal foundation of ant programming. In: Dorigo M, Di Caro G, Sampels M (eds) Proceedings of the third international workshop on ant algorithms (ANTS 2002), Brussels, pp 39–72. doi:10.1007/3-540-45724-0_16
Bonabeau E, Dorigo M, Theraulaz G (1999) Swarm intelligence: from natural to artificial systems. Oxford University Press, Oxford
Bonabeau E, Theraulaz G, Deneubourg JL (1998) Group and mass recruitment in ant colonies: the influence of contact rates. J Theor Biol 195(2):157–166. doi:10.1006/jtbi.1998.0789
Brady SG (2003) Evolution of the army ant syndrome: the origin and long-term evolutionary stasis of a complex of behavioral and reproductive adaptations. Proc Natl Acad Sci USA 100(11):6575–6579. doi:10.1073/pnas.1137809100
Burd M (2000) Foraging behaviour of Atta cephalotes (leaf-cutting ants): an examination of two predictions for load selection. Anim Behav 60(6):781–788. doi:10.1006/anbe.2000.1537
Buschinger A (2011) Queen polymorphism in an Australian ant, Monomorium cf. rubriceps Mayr, 1876 (Hymenoptera: Formicidae). Myrmecol News 15:63–66
Calderone NW, Page RE (1996) Temporal polyethism and behavioural canalization in the honey bee, Apis mellifera. Anim Behav 51(3):631–643. doi:10.1006/anbe.1996.0068
Camazine S, Deneubourg JL, Franks NR, Sneyd J, Theraulaz G, Bonabeau E (2001) Self-organization in biological systems. Princeton University Press, Princeton
Cargel RA, Rinderer TE (2004) Unusual queen cell construction and destruction in Apis mellifera from far-eastern Russia. J Apic Res 43(4):188–190
Creative Commons (2013a) Attribution 2.0 Generic (CC BY 2.0). http://creativecommons.org/licenses/by/2.0/
Creative Commons (2013b) Attribution 2.5 Generic (CC BY 2.5). http://creativecommons.org/licenses/by/2.5/
Creative Commons (2013c) Attribution 3.0 Unported (CC BY 3.0). http://creativecommons.org/licenses/by/3.0/
Cuvillier-Hot V, Gadagkar R, Peeters C, Cobb M (2002) Regulation of reproduction in a queenless ant: aggression, pheromones and reduction in conflict. Proc R Soc B 269(1497):1471–2954. doi:10.1098/rspb.2002.1991
Delsuc F (2003) Army ants trapped by their evolutionary history. PLoS Biol 1(2):e37. doi:10.1371/journal.pbio.0000037
de Biseau JC, Deneubourg JL, Pasteels JM (1991) Collective flexibility during mass recruitment in the ant Myrmica sabuleti (Hymenoptera: Formicidae). Psyche 98(4):323–336. doi:10.1155/1991/38402
Denny AJ, Franks NR, Powell S, Edwards KJ (2004) Exceptionally high levels of multiple mating in an army ant. Naturwissenschaften 91(8):396–399. doi:10.1007/s00114-004-0546-4
Deshpande SA, Sumana A, Surbeck M, Gadagkar R (2006) Wasp who would be queen: a comparative study of two primitively eusocial species. Curr Sci 91(3):332–336
Detrain C, Deneubourg JL (2008) Collective decision-making and foraging patterns in ants and honeybees, vol 35. Academic, Amsterdam/Boston, pp 123–173. doi:10.1016/S0065-2806(08)00002-7
Dornhaus A, Holley JA, Pook VG, Worswick G, Franks NR (2008) Why do not all workers work? colony size and workload during emigrations in the ant Temnothorax albipennis. Behav Ecol Sociobiol 63(1):43–51. doi:10.1007/s00265-008-0634-0
Dorigo M, Birattari M, Stützle T (2006) Ant colony optimization: artificial ants as a computational intelligence technique. IEEE Comput Intell Mag 1(4):28–39. doi:10.1109/MCI.2006.329691
Dorigo M, Di Caro G, Gambardella LM (1999) Ant algorithms for discrete optimization. Artif Life 5(2):137–172. doi:10.1162/106454699568728
Dorigo M, Maniezzo V, Colorni A (1996) Ant System: optimization by a colony of cooperating agents. IEEE Trans Syst Man Cybern Part B: Cybern 26(1):29–41. doi:10.1109/3477.484436
Dussutour A, Beekman M, Nicolis SC, Meyer B (2009) Noise improves collective decision-making by ants in dynamic environments. Proc R Soc B 276(1677):4353–4361. doi:10.1098/rspb.2009.1235
Dussutour A, Fourcassié V, Helbing D, Deneubourg JL (2004) Optimal traffic organization in ants under crowded conditions. Nature 428:70–73. doi:10.1038/nature02345
Farji-Brener AG, Amador-Vargas S, Chinchilla F, Escobar S, Cabrera S, Herrera MI, Sandoval C (2010) Information transfer in head-on encounters between leaf-cutting ant workers: food, trail condition or orientation cues? Anim Behav 79(2):343–349. doi:10.1016/j.anbehav.2009.11.009
Feigenbaum J, Shenker S (2002) Distributed algorithmic mechanism design: recent results and future directions. In: Proceedings of the 6th international workshop on discrete algorithms and methods for mobile computing and communication, Atlanta, pp 1–13. doi:10.1145/570810.570812
Fersch R, Buschinger A, Heinze J (2000) Queen polymorphism in the australian ant Monomorium sp.10. Insectes Sociaux 47(3):280–284. doi:10.1007/PL00001715
Fewell JH (2003) Social insect networks. Science 301(5641):1867–1870. doi:10.1126/science.1088945
Fourcassié V, Dussutour A, Deneubourg JL (2010) Ant traffic rules. J Exp Biol 213(14):2357–2363. doi:10.1242/jeb.031237
Franks NR, Gomez N, Goss S, Deneubourg JL (1991) The blind leading the blind in army ant raid patterns: testing a model of self-organization (Hymenoptera: Formicidae). J Insect Behav 4(4):583–607. doi:10.1007/BF01048072
Franks NR, Richardson T (2006) Teaching in tandem-running ants. Nature 439:153. doi:10.1038/439153a
Franks NR, Tofts C (1994) Foraging for work: how tasks allocate workers. Anim Behav 48(2):470–472. doi:10.1006/anbe.1994.1261
Fujisawa R, Dobata S, Kubota D, Imamura H, Matsuno F (2008) Dependency by concentration of pheromone trail for multiple robots. In: Dorigo M, Birattari M, Blum C, Clerc M, Stüzle T, Winfield AFT (eds) Proceedings of the 6th international conference on ant colony optimization and swarm intelligence (ANTS 2008), Brussels
Gadau J, Gertsch PJ, Heinze J, Pamilo P, Hölldobler B (1998) Oligogyny by unrelated queens in the carpenter ant, Camponotus ligniperdus. Behav Ecol Sociobiol 44(1):23–33. doi:10.1007/s002650050511
Ganeshaiah KN, Veena T (1991) Topology of the foraging trails of Leptogenys processionalis: why are they branched? Behav Ecol Sociobiol 29(4):263–270. doi:10.1007/BF00163983
Ghose T (2013) Human takeover by machines may be closer than we think. http://science.nbcnews.com/_news/2013/05/07/18109236-human-takeover-by-machines-may-be-closer-than-we-think
Google (2009) reCAPTCHA. http://www.google.com/recaptcha
Gordon DM (1996) The organization of work in social insect colonies. Nature 380:121–124. doi:10.1038/380121a0
Gordon DM (2010) Ant encounters: interaction networks and colony behavior. Princeton University Press, Princeton
Gordon DM, Holmes S, Nacu S (2008) The short-term regulation of foraging in harvester ants. Behav Ecol 19(1):217–222. doi:10.1093/beheco/arm125
Gordon DM, Paul RE, Thorpe K (1993) What is the function of encounter patterns in ant colonies? Anim Behav 45(6):1083–1100. doi:10.1006/anbe.1993.1134
Gotoh A, Sameshima S, Tsuji K, Matsumoto T, Miura T (2005) Apoptotic wing degeneration and formation of an altruism-regulating glandular appendage (gemma) in the ponerine ant Diacamma sp. from japan (Hymenoptera, Formicidae, Ponerinae). Dev Genes Evol 215(2):69–77. doi:10.1007/s00427-004n-0456-7n
Gotwald WH Jr (1995) Army ants: the biology of social predation. Cornell University Press, Ithaca
Haight KL (2006) Defensiveness of the fire ant, Solenopsis invicta, is increased during colony rafting. Insectes Sociaux 53(1):32–36. doi:10.1007/s00040-005n-0832-y
Hart AG, Ratnieks FLW (2001) Task partitioning, division of labour and nest compartmentalisation collectively isolate hazardous waste in the leafcutting ant atta cephalotes. Behav Ecol Sociobiol 49(5):387–392. doi:10.1007/s002650000312
Heinze J (1998) Intercastes, intermorphs, and ergatoid queens: who is who in ant reproduction? Insectes Sociaux 45(2):113–124. doi:10.1007/s000400050073
Heinze J, Keller L (2000) Alternative reproductive strategies: a queen perspective in ants. Trends Ecol Evol 15(12):508–512. doi:10.1016/S0169-5347(00)01995-9
Hölldobler B, Carlin NF (1985) Colony founding, queen dominance and oligogyny in the australian meat ant Iridomyrmex purpureus. Behav Ecol Sociobiol 18(1):45–58. doi:10.1007/BF00299237
Hölldobler B, Carlin NF (1989) Colony founding, queen control, and worker reproduction in the ant Aphaenogaster (=Novomessor) cockerelli. Psyche 96(3–4):131–151. doi:10.1155/1989/74135
Hölldobler B, Möglich M, Maschwitz U (1974) Communication by tandem running in the ant Camponotus sericeus. J Comp Physiol A Neuroethol Sens Neural Behav Physiol 90(2):105–127. doi:10.1007/BF00694481
Hölldobler B, Stanton RC, Markl H (1978) Recruitment and food-retrieving behavior in Novomessor (Formicidae: Hymenoptera): I. chemical signals. Behav Ecol Sociobiol 4(2):163–181. doi:10.1007/BF00354978
Hölldobler B, Wilson EO (1977) The number of queens: an important trait in ant evolution. Naturwissenschaften 64(1):8–15. doi:10.1007/BF00439886
Hölldobler B, Wilson EO (1990) The Ants. Harvard University Press, Cambridge
Hölldobler B, Wilson EO (2009) The Superorganism: the beauty, elegance, and strangeness of insect societies. WW Norton, New York
Inoue T, Sakagami SF, Salmah S, Yamane S (1984) The process of colony multiplication in the Sumatran stingless bee Trigona laeviceps. Biotropica 16(2):100–111
Jenkins C (2013) [APP] Swarm! on Glass: The attention economy, glamified. http://livingthruglass.com/app-swarm-on-glass-the-attention-economy-gamified/
Krebs RA, Rissing SW (1991) Preference for large foundress associations in the desert ant Messor pergandei. Anim Behav 41(2):361–363. doi:10.1016/S0003-3472(05)80487-7n
Kronauer DJC, Johnson RA, Boomsma JJ (2007) The evolution of multiple mating in army ants. Evolution 61(2):413–422. doi:10.1111/j.1558-5646n.2007.00040.x
Kronauer DJC, Schöning C, d’Ettorre P, Boomsma JJ (2010) Colony fusion and worker reproduction after queen loss in army ants. Proc R Soc B 277(1682):755–763. doi:10.1098/rspb.2009.1591
Kumar GP, Buffin A, Pavlic TP, Pratt SC, Berman SM (2013) A stochastic hybrid system model of collective transport in the desert ant Aphaenogaster cockerelli. In: Proceedings of the 16th ACM international conference on hybrid systems: computation and control, Philadelphia
Kurzweil R (1999) The age of spiritial machines: when computers exceed human intelligence. Viking, New York
Kurzweil R (2005) The singularity is near: when humans transcend biology. Viking, New York
Lamon B, Topoff H (1981) Avoiding predation by army ants: defensive behaviours of three ant species of the genus Camponotus. Anim Behav 29(4):1070–1081. doi:10.1016/S0003-3472(81)80060-7
Liebig J, Hölldobler B, Peeters C (1998) Are ant workers capable of colony foundation? Naturwissenschaften 85(3):133–135. doi:10.1007/s001140050470
Livnat A, Pippenger N (2006) An optimal brain can be composed of conflicting agents. Proc Natl Acad Sci U S A 103(9):3198–3202. doi:10.1073/pnas.0510932103
Loeliger J, McCullough M (2012) Version control with git: powerful tools and techniques for collaborative software development, 2nd edn. O’Reilly, Cambridge
Mas-Colell A, Whinston MD, Green JR (1995) Microeconomic theory. Oxford University Press, New York
Matthey L, Berman S, Kumar V (2009) Stochastic strategies for a swarm robotic assembly system. In: Proceedings of the 2009 IEEE international conference on robotics and automation, Kobe, pp 1953–1958
Mlot NJ, Tovey CA, Hu DL (2011) Fire ants self-assemble into waterproof rafts to survive floods. Proc Natl Acad Sci U S A 108(19):7669–7673. doi:10.1073/pnas.1016658108
Moffett MW (1988) Foraging dynamics in the group-hunting myrmicine ant, Pheidologeton diversus. J Insect Behav 1(3):309–331. doi:10.1007/BF01054528
Möglich M, Maschwitz U, Hölldobler B (1974) Tandem calling: a new kind of signal in ant communication. Science 186(4168):1046–1047. doi:10.1126/science.186.4168.1046
Molet M, Baalen MV, Peeters C (2008) Shift in colonial reproductive strategy associated with a tropical-temperate gradient in Rhytidoponera ants. Am Nat 172(1):75–87. doi:10.1086/588079
Monnin T, Ratnieks FLW, Jones GR, Beard R (2002) Pretender punishment induced by chemical signalling in a queenless ant. Nature 419(6902):61–65, doi:10.1038/nature00932
Nicolis SC, Deneubourg JL (1999) Emerging patterns and food recruitment in ants: an analytical study. J Theor Biol 198:575–592. doi:10.1006/jtbi.1999.0934
Nonacs P, Reeve HK (1993) Opportunistic adoption of orphaned nests in paper wasps as an alternative reproductive strategy. Behav Process 30(1):47–59. doi:10.1016/0376-6357(93)90011-F
Nonacs P, Reeve HK (1995) The ecology of cooperation in wasps: causes and consequences of alternative reproductive decisions. Ecology 76(3):953–967. doi:dx.doi.org/10.2307/1939359
Osborne MJ, Rubinstein A (1994) A course in game theory. MIT, Cambridge
Palmer KA, Oldroyd BP (2000) Evolution of multiple mating in the genus Apis. Apidologie 31(2):235–248. doi:10.1051/apido:2000119
Pardi L (1948) Dominance order in Polistes wasps. Physiol Zool 21(1):1–13
Partridge LW, Partridge KA, Franks NR (1997) Field survey of a monogynous leptothoracine ant (Hymenoptera, Formicidae): evidence of seasonal polydomy? Insectes Sociaux 44(2):75–83. doi:10.1007/s000400050031
Peeters C (1991a) Ergatoid queens and intercastes in ants: two distinct adult forms which look morphologically intermediate between workers and winged queens. Insectes Sociaux 38(1): 1–15. doi:10.1007/BF01242708
Peeters C (1991b) The occurence of sexual reproduction among ant workers. Biol J Linn Soc 44(2):141–152. doi:10.1111/j.1095-8312.1991.tb00612.x
Peeters C, Hölldobler B, Moffett M, Musthak Ali TM (1994) “wall-papering” and elaborate nest architecture in the ponerine ant Harpegnathos saltator. Insectes Sociaux 41(2):211–218. doi:10.1007/BF01240479
Peeters C, Hölldobler B (1995) Reproductive cooperation between queens and their mated workers: the complex life history of an ant with a valuable nest. Proc Natl Acad Sci U S A 92(24): 10,977–10,979
Peeters C, Ito F (2001) Colony dispersal and the evolution of queen morphology in social Hymenoptera. Annu Rev Entomol 46:601–630. doi:10.1146/annurev.ento.46.1.601
Peeters C, Liebig J, Hölldobler B (2000) Sexual reproduction by both queens and workers in the ponerine ant Harpegnathos saltator. Insectes Sociaux 47(4):325–332. doi:10.1007/PL00001724
Pinter-Wollman N, Wollman R, Guetz A, Holmes S, Gordon DM (2011) The effect of individual variation on the structure and function of interaction networks in harvester ants. J R Soc Interface 8(64):1562–1573. doi:10.1098/rsif.2011.0059
Pollock GB, Rissing SW (1985) Mating season and colony foundation of the seed-harvester ant, Veromessor pergandei. Psyche 92:125–134. doi:10.1155/1985/87410
Pratt SC (2004) Collective control of the timing and type of comb construction by honey bees (Apis mellifera). Apidologie 35:193–205. doi:10.1051/apido:2004005
Pratt SC (2005a) Behavioral mechanisms of collective nest-site choice by the ant Temnothorax curvispinosus. Insectes Sociaux 52(4):383–392. doi:10.1007/s00040-005-0823-z
Pratt SC (2005b) Quorum sensing by encounter rates in the ant Temnothorax albipennis. Behav Ecol 16(2):488–496. doi:10.1093/beheco/ari020
Pratt SC, Mallon EB, Sumpter DJ, Franks NR (2002) Quorum sensing, recruitment, and collective decision-making during colony emigration by the ant Leptothorax albipennis. Behav Ecol Sociobiol 52(2):117–127. doi:10.1007/s00265-002-0487-x
Reeve HK, Gamboa GJ (1983) Colony activity integration in primitively eusocial wasps: the role of the queen (Polistes fuscatus, Hymenoptera: Vespidae). Behav Ecol Sociobiol 13(1):63–74. doi:10.1007/BF00295077
Reeve HK, Gamboa GJ (1987) Queen regulation of worker foraging in paper wasps: a social feedback control system (Polistes fuscatus, Hymenoptera: Vespidae). Behaviour 102(3/4): 147–167
Reeve HK, Starks PT, Peters JM, Nonacs P (2000) Genetic support for the evolutionary theory of reproductive transactions in social wasps. Proc R Soc B 267(1438):75–79. doi:10.1098/rspb.2000.0969
Richardson TO, Christensen K, Franks NR, Jensen HJ, Sendova-Franks AB (2011) Ants in a labyrinth: a statistical mechanics approach to the division of labour. PLoS ONE 6(4):e18416. doi:10.1371/journal.pone.0018416
Rissing SW, Pollock GB, Higgins MR, Hagen RH, Smith DR (1989) Foraging specialization without relatedness or dominance among co-founding ant queens. Nature 338(6214):420–422. doi:10.1038/338420a0
Rissing SW, Johnson RA, Martin JW (2000) Colony founding behavior of some desert ants: geographic variation in metrosis. Psyche 103(1–2):95–101. doi:10.1155/2000/20135
Robson SK, Beshers SN (1997) Division of labour and ’foraging for work’: simulating reality versus the reality of simulations. Anim Behav 53(1):214–218. doi:10.1006/anbe.1996.0290
Sasaki T, Pratt SC (2011) Emergence of group rationality from irrational individuals. Behav Ecol 22(2):276–281. doi:10.1093/beheco/arq198
Sasaki T, Pratt SC (2012) Groups have a larger cognitive capacity than individuals. Curr Biol 22(19):R827–R829. doi:10.1016/j.cub.2012.07.058
Schmolke A (2009) Benefits of dispersed central-place foraging: an individual-based model of a polydomous ant colony. Am Nat 173(6):772–778. doi:10.1086/598493
Schneirla TC (1944) A unique case of circular milling in ants, considered in relation to trail following and the general problem of orientation. Am Mus Novit 1253:1–26
Schneirla TC (1949) Army-ant life and behavior under dry-season conditions. 3. the course of reproduction and colony behavior. Bull Am Mus Nat Hist 94(1):1–82
Schneirla TC (1971) Army ants: a study in social organization. WH Freeman, San Francisco
Schneirla TC, Brown RZ (1950) Army-ant life and behavior under dry-season conditions. 4. further investigation of cyclic processes in behavioral and reproductive functions. Bull Am Mus Nat Hist 50(5):263–354
Schofield RMS, Emmett KD, Niedbala JC, Nesson MH (2011) Leaf-cutter ants with worn mandibles cut half as fast, spend twice the energy, and tend to carry instead of cut. Behav Ecol Sociobiol 65(5):969–982. doi:10.1007/s00265-010-1098-6
Seeley TD (1995) The wisdom of the hive: the social physiology of honey bee colonies. Harvard University, Cambridge
Seeley TD (2010) Honeybee democracy. Princeton University Press, Princeton
Shaffer Z, Sasaki T, Pratt SC (2013) Linear recruitment leads to allocation and flexibility in collective foraging by ants. Anim Behav (in press)
Shakarad M, Gadagkar R (1995) Colony founding in the primitively eusocial wasp, Ropalidia marginata (Hymenoptera: Vespidae). Ecol Entomol 20(3):273–282. doi:10.1111/j.1365-2311.1995.tb00457.x
Sharpe T, Webb B (1996) Simulated and situated models of chemical trail following in ants. In: Pfeifer R, Blumberg B, Meyer JA, Wilson SW (eds) Proceedings of the fifth international conference on simulation of adaptive behavior (SAB96), North Falmouth
Slonczewski J (2013a) Mitochondrial singularity. http://www.antipope.org/charlie/blog-static/2013/03/mitochondrial-singularity.html
Slonczewski J (2013b) Mitochondrial singularity. http://ultraphyte.com/2013/03/25/mitochondrial-singularity/
Smith AA, Haight KL (2008) Army ants as research and collection tools. J Insect Sci 8:71. doi:10.1673/031.008.7101
Smith AA, Hölldobler B, Liebig J (2011) Reclaiming the crown: queen to worker conflict over reproduction in Aphaenogaster cockerelli. Naturwissenschaften 98(3):237–240. doi:10.1007/s00114-011-0761-8
St Laurent AM (2004) Understanding open source and free software licensing. O’Reilly, Beijing/Sebastopol
Sumpter DJT, Beekman M (2003) From nonlinearity to optimality: pheromone trail foraging by ants. Anim Behav 66(2):273–280. doi:10.1006/anbe.2003.2224
Surowieckie J (2004) The wisdom of crowds: why the many are smarter than the few and how collective wisdom shapes business, economies, societies and nations. Doubleday, New York
Svennebring J, Koenig S (2003) Trail-laying robots for robust terrain coverage. In: Proceedings of the 2003 IEEE International conference on robotics and automation (ICRA ’03), Taipei, vol 1, pp 75–82. doi:10.1109/ROBOT.2003.1241576
Szulc J (2011) Galeria :: Cyfrowo :: Macro :: Mrówki. http://foto.julian.net.pl/gallery3/digital/Mocro-fotografia/HomeAnts
Tarpy DR, Nielsen R, Nielsen DI (2004) A scientific note on the revised estimates of effective paternity frequency in Apis. Insectes Sociaux 51(2):203–204. doi:10.1007/s00040-004-0734-4
Tofts C, Franks NR (1992) Doing the right thing: ants, honeybees and naked mole-rats. Trends Ecol Evol 7(10):346–349. doi:10.1016/0169-5347(92)90128-X
Tripet F, Nonacs P (2004) Foraging for work and age-based polyethism: the roles of age and previous experience on task choice in ants. Ethology 110(11):863–877. doi:10.1111/j. 1439-0310.2004.01023.x
Tschinkel WR (2006) The fire ants. Belknap, Cambridge
Visscher PK (2007) Group decision making in nest-site selection among social insects. Annu Rev Entomol 52:255–275. doi:10.1146/annurev.ento.51.110104.151025
Walker SI, Cisneros L, Davies PCW (2012) Evolutionary transitions and top-down causation. In: Proceedings of the thirteenth international conference on the simulation and synthesis of living systems (Artificial Life 13), vol 13, East Lansing, pp 283–290. doi:10.7551/978-0-262-31050-5-ch038
Walker SI, Davies PCW (2013) The algorithmic origins of life. J R Soc Interface 10(79):20120869. doi:10.1098/rsif.2012.0869
Waters JS, Fewell JH (2012) Information processing in social insect networks. PLoS ONE 7(7):e40337. doi:10.1371/journal.pone.0040337
West-Eberhard MJ (1969) The social biology of polistine wasps. Miscellaneous publications, vol 140. Museum of Zoology, University of Michigan, Ann Arbor
Wheeler WM (1918) A study of some ant larvæ, with a consideration of the origin and meaning of the social habit among insects. Proc Am Philos Soc 57(4):293–343
Wheeler DE (1986) Developmental and physiological determinants of caste in social Hymenoptera: evolutionary implications. Am Nat 128(1):13–34
Wilson EO (1971) The insect societies. Belknap Press, Cambridge
Yang R, Fang F, Jiang AX, Rajagopal K, Tambe M, Maheswaran RT (2012) Designing better strategies against human adversaries in network security games. In: Proceedings of the 11th international conference on autonomous agents and multiagent systems (AAMAS ’12), Valencia, vol 3, pp 1299–1300
Acknowledgements
Thanks to Bert Hölldobler for connecting us to this interesting speculative project. The writing of this chapter was supported by the National Science Foundation (award 1012029). Images in this chapter that were not already in the public domain were used either under the explicit permission of the image owner or according to a CC BY 2.0 (Creative Commons 2013a), CC BY 2.5 (Creative Commons 2013b), or CC BY 3.0 (Creative Commons 2013c) license.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer Science+Business Media New York
About this chapter
Cite this chapter
Pavlic, T.P., Pratt, S.C. (2013). Superorganismic Behavior via Human Computation. In: Michelucci, P. (eds) Handbook of Human Computation. Springer, New York, NY. https://doi.org/10.1007/978-1-4614-8806-4_74
Download citation
DOI: https://doi.org/10.1007/978-1-4614-8806-4_74
Published:
Publisher Name: Springer, New York, NY
Print ISBN: 978-1-4614-8805-7
Online ISBN: 978-1-4614-8806-4
eBook Packages: Computer ScienceComputer Science (R0)