
Abstract
The aim of this chapter is to demonstrate the role of adaptation and self-organization in life and society. The range of adaptation is very wide and includes, among others, animal physiology adaptation, immigrant adaptation, animal fertility adaptation, emotional adaptation, adaptation to stress, etc. Self-organization is an intrinsic process taking place in both biological and societal systems. In both cases, the rules of self-organization are determined on the basis of local information only, without information from a global level. Examples of self-organizing biological systems or patterns include a raiding column of army ants, a termite mound, pigmentation patterns on shells, etc. This chapter illustrates the presence of adaptation and self-organization through a number of representative examples, namely: adaptation of animals, adaptation of ecosystems, adaptation of immune systems, adaptation of socio-ecological and general societal systems, self-organization of knowledge management, and self-organization of technological and man-made systems (traffic lights control, WWW, multiagent robotic systems, bio-inspired systems). The above examples demonstrate clearly that adaptation and self-organization are fundamental processes for the survival of living organisms and societies, and the optimal operation of hard and soft man-made systems.
For the source of any characteristic so widespread and uniform as this adaptation to environment we must go back to the very beginning of the human race.
Ellsworth Huntington
The survival of the fittest is the ageless law of nature, but the fittest are rarely the strong. The fittest are those endowed with the qualifications for adaptation, the ability to accept the inevitable and conform to the unavoidable, to harmonize with existing or changing conditions.
Dave E. Smalley
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others



Keywords
- Adaptation
- Self-organization (S-O)
- Life
- Human society
- Biological system
- Genetic evolution
- Fractal scaling (power law)
- Self-organizing social system
- Social dimension
- Institutional dimension
- Economic dimension
- Environmental dimension
- Animal adaptation
- Complex adaptive system (CAS)
- Ecosystem as CAS
- Immune system adaptation
- social ecological system
- Stock market as CAS
- Internet-based S-O voting system
- Knowledge pillars
- Knowledge-based society
- Man-made S-O systems
- S-O traffic lights control
13.1 Introduction
In Chaps. 8 and 9, we have presented the concepts of adaptation and self-organization including the relevant definitions, the historical landmarks of their study, and the properties possessed by adaptive/complex adaptive systems and self-organizing systems in nature and society. We have seen that adaptation is manifested as genetic adaptation, structure adaptation , physical/physiological adaptation, function adaptation, and, in general, evolution adaptation. According to Julian Huxley: “adaptation is nothing else than arrangements subserving specialized functions, adjusted to the needs and the mode of life of the species or type… Adaptation cannot but be universal among organisms, and every organism cannot be other than a bundle of adaptations, more or less detailed and efficient, coordinated in greater or lesser degree [1, p. 420].” A presentation of historical perspectives on adaptation can be found in [2], a global view of adaptation is provided in [3], and a critique of the evolutionary thought on adaptation and natural selection is offered in [4]. Today there is a vast bibliography on “adaptation” and “complex adaptive systems,” where the topics of life, society, and science that it covers are revealed and discussed.
A few of them are discussed in [5,6,7,8,9,10,11,12,13,14,15]. They range from animal physiology adaptation [6], immigrants adaptation [8], human fertility adaptation [9], adaptation to stress [10], adaptation in the mind-brain and physiology concepts [11], technology adaptation of e-society [12], emotional adaptation [13], to the view and study of the Web and supply networks as complex adaptive systems [14, 15].
As explained in Chap. 9, self-organization is a process, in which “patterns” at the global level of a system are the result of numerous interactions among the components of its lower levels. The rules that determine the interactions among the system’s components are executed on the basis of local information only, without information from the global level. The patterns of the global level are an emergent property imported into the system by an external ordering entity.
Examples of self-organizing biological patterns are: a raiding column of army ants, the complex architecture of a termite mound, pigmentation patterns on shells, etc. Living systems obey, in addition to the physical laws, genetic programs that are the result of genetic evolution. This adds an extra dimension to self-organization in biological systems because the fine-tuning of the rules of local interactions is controlled by natural selection. A complex phenomenon possesses self-organizing complexity only if it is governed by some kind of fractal (power law) scaling. Of course, power scaling may be applicable only over a limited range of scales.
Self-organization is also a feature of human society . Some representative references dealing with self-organization in society and technology are [7,8,9,10,11,12,13,14,15,16]. Self-organization in modern society involves four basic dimensions, namely: the social dimension, economic dimension, institutional dimension, and environmental dimension, which are interrelated and interacting as shown in Fig. 13.1.

The reader is informed that Web figures and references were collected at the time of writing the book. Since then some of them may no longer be valid due to change or removal by their creators, they may no longer be useful
The four principal interconnected dimensions of social self-organization http://www.eolss.net/CF03-1.jpg).
Complex adaptive systems theory offers the tools to analyze how large-scale self-organization arises and is maintained in many physical, biological, natural, and societal systems.
An important example, very crucial for modern human life on Earth, is the area of ecosystems and the biosphere. Understanding how changes, at one level of biological organization, influence the patterns or mechanisms occurring at another level, and how the cross-scale interactions lead to adaptation and self-organization can considerably help the management efforts that aim to assure manipulation and rehabilitation/restoration of damaged ecosystems.
The chapter presents the following examples of adaptation and self-organization in life and society: adaptation of animals, ecosystems, climate change , immune systems, social-ecological systems , stock market, general society systems, knowledge management, and man-made self-organizing systems design.
13.2 Adaptations of Animals
Adaptations of animals are among the best examples of adaptation in nature [5, 17]. Both animals and plants are continually adapting to their habitats. The habitats of plants and animals offer extremely diverse living conditions of temperature and water availability over the widely spaced areas of Earth. For example, more than 99% of Antarctica is covered by ice. Antarctica is very cold, and only a small number of plants grow there (e.g., algae, mosses, and lichens). Animals that have adapted to live in Antarctica obtain their food from the sea or migrate to leave the continent during the winter. By adaptation, an animal’s body changes to help the animal to live and survive in its environment. The physical characteristics of animals help them to find food, live safely, survive the weather conditions, etc. These characteristics are collectively called adaptations. Adaptations in each species has developed slowly over many generations, i.e., they are the result of evolution.
Some general examples of animals’ physical adaptations are the following:
-
Wing-flapping mode
-
Bird’s beak shape
-
Nose and ear’s shape
-
Type of für
-
Color of the für
-
The number of fingers
-
The locomotion style, etc.
The wing of a bird ends in a set of digits. The wing surface is made up of flight feathers aligned laterally. The pectoral muscles of a bird are purposefully located below the wings and provide the locomotive driving power for the bird flight. Birds use warm rising currents of air to stay afloat without using much energy. Birds are able to orient themselves using landmarks, the Sun and the Earth’s magnetic field for locating true North. Night birds learn how to orient themselves by the positions of the stars, using celestial navigation; birds migrate annually, typically from breeding to nonbreeding grounds, relocating to areas with abundant food and returning to their breeding grounds when the food is again abundant to breed and bring up their young.
In the following, we provide a short list of animal adaptations in order to illustrate their variety and usefulness:
Polar bears
Their color is white to blend in with the snow and ice. They have under their skin a thick layer of fat to keep warm in their cold environment. Their large paws enable the polar bear to walk in the snow.
Penguins
These flightless birds are excellent swimmers using their webbed feed. They live on pack ice and the oceans around Antarctica. They keep warm using their thick skin and the large amount of underlying fat. They have streamlined bodies to reduce drag in the water and flipper-shaped wing to be able to “fly” underwater at speeds reaching 15 mph.
Camels
They have many adaptations that enable them to live in desert environments that are dry and hot. They have long eyelashes and nostrils that can open and close for protection against the sand blown around by winds. They can live for more than a week without water and without food for long periods (many months). When they find water, they can drink up to 40–45 L.
Fennec fox
This is the only carnivore able to live in a desert habitat without free water. To this end, their kidneys are adapted to function with only little water. They take moisture from their food. They have thick fur to insulate them from the cold desert nights. They have sandy-colored fur for camouflage and thick fur on the soles of their feet for insulation against the hot sand of the desert.
Lions
Some of their adaptations are: heavily muscled forelimbs and shoulders for capturing large prey, eyes set in the front of head for depth perception and good estimation of distances, rough tongues to peel the skin of prey animal away from the flesh and the flesh from bone, belly skin for protection against kicking by prey, and forepaws equipped with long retractile claws for easy grabbing and holding of prey.
Giraffes
Their long neck help them to feed from treetops and detect predators. Their hearts are extremely large and powerful to pump blood up their long necks to their brains (about 2–3 times more powerful than a human’s heart). A giraffe can drink up to 15–18 L of water. The spots on their fur are for camouflage among the trees. Giraffes get water from the dew on the leaves that they eat. Their long and tough tongues enable them to pull leaves from the branches without being hurt by the thorns during foraging.
Dolphins
They have keen hearing ability and high mobility for protection from predators. For better protection, they swim in groups. Their bodies are streamlined to enable them to moving fast to catch food and escape from predators. They also have greater intelligence than most of the other mammals.
13.3 Ecosystems as Complex Adaptive Systems
Ecosystems represent one of the classes of natural systems that possess the features of complex adaptive systems outlined in Chap. 8. As we saw in Sect. 10.3, ecosystems are open thermodynamic systems with respect to energy. Ecosystems are controlled in two well-balanced ways:
-
Bottom-up control Here, it is the nutrient supply to primary producers that controls the operation of the ecosystem.
-
Top-down control Here, it is predation and grazing by higher trophic levels on lower trophic levels that controls the ecosystem operation.
If the nutrient supply is increased, the autotrophs’ production increase is propagated via the food web , and so all the other trophic levels will expand accordingly. If there is an increase in predators, fewer grazers will result, which leads to more primary producers as fewer of them are eaten by grazers. This means that the control of population size and overall productivity “travels” from the top levels of the food chain down to the bottom trophic levels . Actually, in real ecosystems, neither mechanism completely occurs, but both of these controls take place in any ecosystem at any time. In order to see how an ecosystem will behave or adapt under several situations (e.g., a climate change), we have first to understand how both bottom-up and top-down control mechanisms are operating. Prey and predators have reciprocal roles that are specified by the feedback loops in which they participate. To be part of a food web ipso facto is to belong to a system of feedback loops that establish pathways of energy flow from living being to living being.
One of the early studies on the consideration of ecosystems and biosphere as complex adaptive systems was conducted by Simon Levin [18, 19]. He demonstrated that ecosystems possess the four CAS properties suggested by Holland (complexity, nonlinearity, flows, and diversity). Bonabeau [20] classified social insect colonies (ants, termites, etc.) as complex adaptive systems and demonstrated that they possess all the CAS properties presented by Levin [18]. Social insect colonies are composed of hundreds to millions of genetically similar individuals. These individuals interact locally but collectively to produce large-scale patterns of colonies dynamics. A similar view of ecosystems as complex adaptive systems was inherent in [21]. A simple adaptive system is a flock of birds. Actually, there is no bird-in-chief directing the behavior. Individual birds have some degree of decision-making capacity, but all the flight decisions have to follow simple rules, such as:
-
Align flight to match the neighbors
-
Avoid collision with neighbors or obstacles
-
Fly an average distance from neighbors.
These rules, despite their simplicity, lead to very complex adaptive flocking behaviors. Figure 13.2 shows an example of bird collective movement and two other cases of self-adaptive collective movement in nature.

Three examples of collective movement: a birds, b social insects, c fish (www.irit.fr/TFGSO/DOCS/TFGSO_Mano.ppt, http://www.cs.tufts.edu/~paulina/images/fish.jpg)
Janssen [22] uses genetic algorithms as a modeling tool for adaptation and management in two different cases, namely: (i) how the evolution of drug resistance alters malaria dynamics, and how individual-level variability in humans changes group responses to elevated atmospheric carbon dioxide. These two case studies help to explain how relatively simple CAS techniques may lead to the emergence of fresh perspectives on complex management problems that cannot be easily addressed by standard ecological models.
In general, CAS techniques provide insight into large- and cross-scale ecological interactions and help in the successful analysis of the role of adaptation in driving system dynamics and responses to new situation.
13.4 Adaptation to Climate Change
In this section, we will discuss one particularly critical, current problem of ecological adaptation , namely the problem of adaptation to climate change . The study of this adaptation is very complex and provides many challenges. One of them is the requirement to get information about impacts on climate change, as well as their secondary effects. All the approaches to understanding the potential impacts of climate involve, or are dominated by, uncertainty. Any attempt to face these uncertainties needs the design of adaptation policies that would be successful under a wide variety of future climate conditions, i.e., they should be “robust” against the uncertainties. Of course, it would be difficult to develop adaptation options that address simultaneously a wide range of drier and wetter conditions. These drier and wetter conditions need to be handled by different adaptation schemes. It should be noted that it is not always necessary to justify adaptation actions. If the weather seems to follow a well-known trend, there is no need for detailed climatic data for deciding the policies to be followed.
Clearly, each household, community, and society needs to design an adaptation strategy that fits its own specific conditions. This can be done via an enabling national policy/legislation framework and functional and environmentally conscious institutions. In any case, the resources allocated must be sufficient to meet the minimal, administrative, societal levels.
According to the Environmental Change Institute (ECI) [23], the following issues must be studied and faced:
-
How to make successful decisions about adaptation to climate change.
-
The effectiveness of international environmental agreements.
-
The role of hybrid schemes of governance in environmental risk management (co-governance, public-private partnerships, social-private partnerships).
-
Motivators of behavioral responses to environmental risk (human motivation, social values and culture, social and economic characteristics, attitudes towards the environment, etc.).
Of course, the above challenges of adaptation to climate change appear differently in developing and developed countries, although there are the following common concerns [24]:
-
The need to shift from studying the impact of climate change to increased understanding of how to make adaptation occur
-
The need to examine adaptation needs and identify priorities
-
The relative roles of adaptation and mitigation actions
-
The need to clarify the relationship between climate-change adaptation policies and the mainstream of development and financial support
-
What funding mechanisms and organizations can be used for delivery at national and international levels.
Climate Change in Developed Countries
-
Developed countries have accepted the need to meet obligations (financial and other) towards covering the cost of the accumulated greenhouse gas.
-
The financial mechanisms should deliver effectively for their taxpayers.
-
The minimum conditions for accessing the required funding must be met.
-
There should be no proliferation of new funds under the Convention.
Climate Change Issues of Developing Countries
-
Aspects of equity and justice about the damage caused by climate change to vulnerable countries due to emissions from rich developed countries are of primary concern.
-
Developed countries must deliver on their obligations under the Convention for finance, technology, and capacity building.
-
The additional costs for adaptation to climate change should be covered.
-
Governance of financial mechanisms should be transparent and include an equitable and balanced representation by all parties and “direct access” to funding to all recipient countries.
-
Support should be provided, not in a fragmented manner, but through international organizations (e.g., the United Nations Development Framework Convention on Climate Change (UNFCC).
In [25], the Intergovernmental Panel on Climate Change (IPCC) of EPA (Environmental Protection Agency, USA) provides a discussion on climate-change adaptation strategies and states that “adaptation alone is not expected to cope with all the projected effects of climate change , and especially not over the long term as must impacts increase in magnitude.” IPCC’s definition of adaptation is: “the adjustment in natural or human systems in response to actual or expected climatic stimuli or their effects, which moderates harm or exploits beneficial opportunities” (2007).
In non-managed natural systems, adaptation is not planned but occurs when forced to do so (e.g., as the climate warms, tree and animal species migrate to the north in order to live in suitable climatic conditions and habitats). In human society , much of the adaptation is planned and implemented by the government, public agencies, and private organizations. But for humans, adaptation is a risk-management process that has costs and is not foolproof. The estimated value of avoided damages against the costs of implementing the adaptation strategy should be taken into account.
Some examples of potential adaptations in various realms of human society are the following [25]:
-
Human health (Urban tree planting, weather advisories, adjustment of clothing, and fluid intake)
-
Coastal areas and sea-level rise (Shore protection, adaptive land-use measures, protection of water supplies from saltwater contamination)
-
Agriculture and forestry (Controlling the planting dates, breeding novel, more-tolerant plant species and crops, controlling insect outbreaks)
-
Ecosystems and wildlife (Protecting species-migration avenues, promoting management practices that provide reliance to the ecosystem)
-
Water and energy resources (Improving water-use efficiency, conserving soil moisture, protecting fresh-water resources from saltwater intrusion, improving energy -use efficiency, diversifying power supply to face power-plant failures, protecting power facilities against extreme weather phenomena).
Other useful and easily accessible sources in which the adaptation of humans to climate change is discussed include [23, 25,26,27,28].
13.5 Adaptation of Immune and Social-Ecological Systems
The immune system aims to maintain the health of the body through protection from invasions of bacteria, viruses, fungi, and parasites. The immune system has the ability to detect and eliminate these harmful pathogens and remember successful responses to invasions so as to reuse these responses when similar pathogens invade in the future. The adaptability of immune systems is due to the distributed system of an extremely diverse set of modules (lymphocytes) that assure the detection of pathogens by different modules. The principal advantage of the adaptive immune systems is their ability to match partial and temporal defense mechanisms to those of the pathogens’ evolution. Actually, viruses and bacteria multiply quickly (with generational periods on the order of minutes or hours) which allows them to mutate and genetically change easily and quickly. Long-lived vertebrates cannot match the pace of pathogen evolution, but the adaptive immune system offers a suitable evolutionary adaptation to this mismatch in scale [29, 30]. This adaptation ability is achieved by a special class of white blood cells, the lymphocytes, which circulate throughout the body via the lymph system. The primary function of lymphocytes is to detect pathogens and help the organism to eliminate them. The immune system of vertebrates needs to face local disease ecology from the moment the organism is born. The initial capacity of the offspring comes from the antigen experience accumulated by the mother and is extended through lactation in mammals [31].
The immune adaptive systems function on several spatial and temporal scales, namely [32]:
-
1
Extremely small spatial and temporal scales at the molecular-level dynamics of the interacting antibodies.
-
2
Immunity level at which antibodies proliferate against a specific antigen. During this process, the antibody population becomes more specific and the concentration increases.
Analogously, social-ecological systems (SESs) work on several social-ecological scales that depend on the level of the social agent involved. For example, a community developing response mechanisms to deal with a particular disturbance represents a “social agent” that may vary from an individual to a state, learning, experimentation, and memory towards the adaptation goal. A social agent may involve several functional components (entrepreneurs, innovators, visionaries, experiment specialists, etc.) that contribute substantially to achieve the required adaptability.
It is noted that under certain circumstances an immune system or social-ecological system may lose adaptive capability by suppressing disturbances. For example, the suppressions of fire lead to an accumulation of tree biomass [33], and the lack of fire leads to suppression and elimination of fire-resistant species via competition from other species because there is a cost to being fire-resistant. Adaptation of SESs to reduce the risk of the system due to a small crisis (e.g., fires on an immune response) helps the system to prevent a large crisis (e.g., ecosystem conversion or bacterial resistance). The immune system has been extensively studied in the framework of complex adaptive systems . For example, in [34], a simulation method for the immune system is presented via a CAS model, and, in [35], the simulation of an immune system and HIV was considered using genetic algorithms, cellular automata, and classifier algorithms. A study of immune systems using genetic algorithms is presented in [36].
13.6 Stock Markets as Complex Adaptive Systems
Classical stock-market theory is based on a few basic assumptions, mainly “primary efficient market” and “investor rationality.” A short discussion of these assumptions follows [37]:
-
Stock-market efficiency This assumption suggests that stock prices include all relevant information when this information is readily available and widely disseminated. Therefore, it is assumed that there is no systematic way to exploit trading opportunities and achieve better results. Market efficiency does not mean that stock prices are always correct, but it does imply that stock prices are not mispriced in a systematic or predictable way in any manner. The changes in prices come only as a result of the receipt of random (unexpected) information, a process modeled by a random walk. As a result, the efficient market assumption leads to modest trading activity and limited price fluctuations.
-
Investor rationality Rational investors can rapidly and precisely evaluate and optimize risk/reward outcomes. They persistently seek profit opportunities, and their efforts lead to the market efficiency. Actually, rational investors try to obtain the highest return for a given risk level. Of course, investor rationality does not mean that all investors are rational profit seekers.
A classical stock market falls short in the following areas:
-
Stock-market returns are not normal (as capital-market theory suggests). The return distributions show high “kurtosis,” which implies that periods of relatively modest change are interspersed with higher than predicted changes (i.e., booms and crashes).
-
The random walk model is not supported by the data Return series are frequently both persistent and trend-reinforced, i.e., financial-asset return can be predicted to some degree.
-
The relation of reward and risk is not linear The Capital-Asset Pricing Model (CAPM) of rational investors is not valid always in practice.
-
Investors are not rational This is due to several reasons: people make systematic errors in judgment, individuals risk preferences are primarily influenced by the way information is presented or “packaged,” investors trade more than the theory suggests, and finally, people usually operate using inductive, not deductive, reasoning.
Despite the above drawbacks, classical theory has advanced very much our understanding of capital markets, but it appears to have approached its limits.
In [37], Michael Mauboussin develops a new challenging theory of capital markets as complex adaptive systems . This new theory was motivated by the observed fact that, as we add more players (agents) in the stock market game, something remarkably new occurs, which is the appearance of the well-known self-organized criticality (see Sect. 9.4). This takes place without any design or help from any outside agent, but it is the direct result of the dynamic interactions among the agents of the system. Therefore, the system has the self-organizing feature and the other features of complex adaptive systems (aggregation, adaptive decision rules, negative- and positive- feedback loops, emergence, etc.).
The question is to see how the CAS framework resolves the above inconsistencies between the classical stock-market theory and actual practice. According to [37], the answer to this question is the following:
-
The CAS model accounts for the high kurtosis (“fat rails”) appearing in actual return distributions. This is because periods of stability punctuated by rapid change (attributable to criticality) is a feature of most complex adaptive systems.
-
The trend persistence is a feature of most natural phenomena. Therefore, some degree of trend should be expected to occur in the stock market.
-
The actual nonrationality of investors can be justified by the CAS model. Complex adaptive systems can explain market dynamics without the need to assume that investors have homogeneous expectations.
-
A CAS model offers a better descriptive model of the market, the poor performance of actual portfolio managers is consistent with both the CAS model and the market-efficiency model.
-
Researchers in the CAS area have developed the actual market process (e.g., [38]). These models employ agents with multiple “expectational models.” Agents discard poorly performing rules in favor of more successful rules. The results of simulation show that, when the agents replace their expectational models slowly, the classical capital market-model predominates. The above CAS simulation of stock markets contributes to a better understanding of the behavior of capital markets.
To summarize, complex adaptive systems seem to offer a good description of how the capital market works. CAS predict stock-price changes more closely than what occurs in practice, while revealing why markets are so hard for investors to beat. Although the underlying assumptions of CAS are very simple, they are not so restrictive as investor rationality or lead-steer assumptions of classical market theory. Therefore, capital managers can go much less far astray with the CAS model compared to the classical stock-market efficiency model. A discussion on the electricity market as a complex adaptive system is provided in [39], where it is indicated that the electricity market is a CAS involving both the economic issues and the climatic/ecological issues.
In general, complex adaptive systems are all around us. They offer a model for thinking about our world but not for predicting what will happen. Complex adaptive systems are based on agents that contribute to the emergent operation of the system without knowing the system concept.
13.7 Society Is a Self-organizing System
The question whether human society is a self-organizing system has attracted the attention of sociologists and scientists for a long time [16, 40,41,42,43,44,45,46]. Sociologists agree that human societies have always been organized according to the primary means of subsistence, political and cultural traditions, beliefs, religion, and values.
Kuhn [47] has proposed studying the development of the sciences in terms of paradigms that historically are emerging from crises in communication. After its establishment, a paradigm starts to organize a science in terms of relevant communications and cognitions, and in terms of underlying communities. The concept of paradigms has offered sociology of science a good model for understanding self-organization as an agency at the supra-individual level. As we have seen in several places of this book, the concept of self-organization has been related to nonequilibrium thermodynamics [48]. Self-organization has also been considered in the framework of neurophysiology [49]. The use of the self-organization concept in sociology leads to the necessity to answer the question of the contingency of this theory as one more paradigm in science. One might ask what one gains or loses by using the self-organization hypothesis as a paradigm specific to the communications that they are allowed. Loet Leydesdorff [50,51,52] has argued that, in order to achieve sociological understanding with respect to the concept of paradigm and the incommensurability between paradigms, these concepts should be reformulated in terms of discourses, i.e., as communication systems . The paradigm concept refers to the possibility of self-organization in these communication systems . Leydesdorff has the opinion that there is no a priori reason to exclude sociological inference at the meta-theoretic level from this general mechanism. The inference leads to the hypothesis of self-organization as the general form of sociological scientific discourse, which is by default chaotic. Sociological theory itself is a reflexive scientific communication system. Self-organization teaches that the lower level variation is a necessity for a system to be able to organize itself. Only a reflexive understanding of the contingent history allows the further specification of the emerging system of reference. Both theory and methods can profit from the reflexive turn in relationships with one another. In sociology, the processes of differentiation and institutionalization are two basic processes that contribute to social self-organization . Parsons suggested that these two processes (i.e., internalization of cultural and social objects into the personality and the relations between the various components of society) can be understood using the same systemic relations among all stable systems of social interaction [45]. In his own words: “The phenomenon that cultural norms are internalized to personalities and institutionalized in collectivities is a case of the interpenetration of subsystems of action, in this case social system, cultural system and personality.… Hence the critical proposition is that institutionalized normative culture is an essential part of all stable systems of social interaction. Therefore, the social system and culture must be integrated in specific ways of their interpretations.” According to Luhmann [44], the social communication system cannot function without communicating individuals (actors), but only the message (i.e., the action) is communicated, not the actor. Therefore, the action may have different meanings for the sending actor, the receiving actor, and the social system, because they have different systems of reference. The critical issue here is that Luhmann’s theory does not include the actors in the social system, but the exchange information through interpenetration (i.e., via actions). Adding the time dimension to this theory, different frequencies may occur at the self-referential update within each subsystem. Social systems operate through actions by individuals (local nodes), although not all actors can participate in each update. For example, small economic transactions may have a strong impact on political processes, but these changes may be unnoticed (temporarily) for many of the actors involved.
According to Leydesdorff [52], the reflexibility needed for understanding the self-organization process (i.e., the differentiation between the instance of reflection and the reflected substance) requires a probabilistic interpretation of self-organizing social systems (e.g., Shannon’s communication theory), but does not need a physical interpretation. Therefore, the reflexive analysis of societal self-organization involves the following analytical tasks [52]:
-
Communication theory should be extended beyond nonequilibrium thermodynamics, i.e., to other nonequilibrium systems that do not rely on a physico-chemical interpretation.
-
Substantive knowledge about what the systems communicate, how this is selected, and eventually how this stabilizes and self-organizes the social system over time has to be elaborated in each particular case.
-
The reflexive nature of sociological systems has helped to understand what it means “to apply” mathematical communication theory to the social system as a special case. Actually, only sociology can understand itself reflexively as a special communication system. The natural sciences assume that data variance is provided by nature, whereas biology assumes that selection is a feature of nature. Psychology, although it shares with sociology a radical understanding of the reconstructive nature of knowledge, does not have the above self-reflexive understanding feature.
Figure 13.3a shows an example of self-organizing social systems, namely a self-organizing electronic voting system which involves two top layers: (i) self-organizing process/event layer, and (ii) IVCS interface layer, and three lower level layers (web services layer, applications/application server layer, and persistence layer). The interaction/self-organization taking place in these layers is realized through the design and implementation of several functions and applications as shown in the figure. Figure 13.3b shows a generic architecture for human-interactive, adaptive hard and soft automation systems. The nature and structure of the components of this architecture depend on the particular application concerned.

a Internet-based adaptive/self-organized voting system, b architecture of a generic adaptive automation system (a) (http://farm8.staticflickr.com/7130/6863744322_9c46f1558b_z.jpg, (b) (http://www.imse.iastate.edu/dorneich/files/2012/12/image1.png)
13.8 Knowledge Management in Self-organizing Social Systems
Knowledge is a process that involves three principal components:
-
Cognition
-
Communication
-
Cooperation
The knowledge-management cycle in societal systems is shown in Fig. 13.4. It involves four stages, namely:

The knowledge-management cycle in social systems (http://www.caci.com/images/fcc/Knowledge_Management_Lifecycle.jpg)
-
(i)
Capturing stage
-
(ii)
Organization stage
-
(iii)
Assessment stage
-
(iv)
Dissemination stage
Figure 13.5 shows a pictorial representation of three interdependent branches (pillars) of knowledge creation for system safety in the “knowledge-based society,” namely: education, information, and science & technology, including the basic elements of them.

Pillars of knowledge in the “knowledge-based society” (http://www.system-safety.org/images/CreatingSafetyKnowledge.gif, http://www.system-safety.org/about/strategic.php)
“Education” involves the elements of certification, mentoring, training courses, policy, standards, and customized solutions.
“Information” involves the elements of best practices, lessons learned, international archives, corporate memory, know-how, and expertise database.
“Science and technology” involves the elements of academia, government, industry, national laboratories, professional society, etc. These pillars are appropriately applicable in other processes, aspects, and functions of “knowledge-based society.” In particular, depending on the knowledge application, the “science and technology” pillar should be based on the knowledge of the particular scientific or technological area concerned, and/or be extended to humanistic, economic, managerial, ecological, medical, and other knowledge areas.
The knowledge involved in knowledge-based society and social systems needs to be properly managed and self-organized. Society is based on individuals. Therefore, social analysis has to start with individuals and then extended to groups, organizations, institutions, or networks. Christian Fuchs calls the self-organization of social systems re-creation [53]. Societal structures don’t exist externally to, but only in and via, human agents. The interaction of human agents (actors) leads to new social qualities and structures that cannot be anticipated by merely analyzing the individual actors’ performance. The internal structures influence individuals’ thinking and actions (i.e., their constraints and enabling actions). This is actually a top-down emergence , in which new individual and group properties can emerge. The entire cycle is the fundamental process of societal self-organization which is called re-creation because a social system maintains and reproduces itself through permanent human agency and constraining/enabling processes. This concept was coined by Hofkirchner [54] and further elaborated by Fuchs [55,56,57,58]. Recreation means that individuals of a system persistently change their joint environment. This allows the system to change, maintain, adapt, and reproduce itself. The above self-organization concept of a social system is illustrated in Fig. 13.6.

Structure of self-organization/re-creation
Giddens in [59] states: “Human social activities, like some self-reproducing items in nature, are recursive. That is to say, they are not brought into being by social actors but continually recreated by them via the very means whereby they express themselves as actors.” The information concept helps to explain the dynamics of self-organized units of matter: it is a relationship of reflection between a fluctuation that produces changes within a system and the structure of the system. In social systems, knowledge is the social manifestation of information. The units of organized matter are active individual or collective human actors [60].
In social systems, self-organization generates the so-called “objective social knowledge,” in which the social knowledge is produced in the course of the social interactions and relationships of several human actors. Objective social knowledge involves scientific/technological elements, life-support elements, and everything else that contributes to a society.
Therefore, one can classify objective social knowledge into the following types:
-
Ecological knowledge
-
Technological knowledge
-
Economic knowledge
-
Political knowledge
-
Cultural knowledge
These types store existing knowledge about past social actions, and facilitate future social actions by exploiting the fundamental ways of acting socially and not needing to use exclusively new rules for each situation. On the informational level, the social interaction and production process involves the three aspects mentioned above, namely: cognition, communication, and cooperation. Part of subjective knowledge (“cognition”) is communicated from one individual to the other and vice versa (“communication”). There is some degree of autonomy or “chance” in this process, but there is a possibility to produce new knowledge (qualities) as a result of synergies (“cooperation”) between the individuals. The structural subjective knowledge involved in the systems is coordinated, and something new emerges in a self-organization way.
We now discuss the management of knowledge, which appears to be of basic task in knowledge-based society (KBS). All social structures store knowledge about society: they involve a history of social relationships and enable future actions. Thus, all societies are actually knowledge-based societies. This knowledge-based character of society is enhanced continuously by the rising impact of scientific/technological advancements, knowledge-based/artificial-intelligence technologies, and accumulated expertise. A short list of basic features of knowledge follows [53]:
-
Knowledge is a human and cultural product. It is a manifestation of information in the human-social environment. It does not exist in nature as such.
-
Knowledge exists in both human brains and social structures and artifacts. It contains both subjective and objective elements that are mutually connected.
-
Knowledge is intrinsically coupled to “not knowing” and is persistently updated and enhanced.
-
Knowledge is a social not substantial public good that has a historical character.
-
Knowledge production has a strongly cooperative and networked nature.
-
Knowledge expands while it is used, it can be compressed, it can replace other economic resources, and it can be transmitted and transported.
-
Purchasers of knowledge simply buy copies of the original data. The costs of reproducing knowledge are very low and become lower as the technology progress.
-
In contrast to capital, knowledge appreciates by usage. Its marginal utility increases with its exploitation.
Social systems in the knowledge-based society possess the following characteristics:
-
Complex knowledge patterns
-
A networked nature
-
A global (continuously enhanced) character
-
Dynamic communication
-
A high degree of complexity and flexibility
Thus, the question raised here is whether knowledge systems can be managed so as to secure efficiency of an organization and well-being of its members, and, if yes, what are the basic guiding rules of knowledge management. The first rule is that all kinds of human intervention should be minimized because intervention may be harmful and create problems.
Haye reveals the spontaneous nature of society and differentiates orders in self-forming (spontaneous) orders and deliberately arranged (planned) orders [61]. Spontaneous orders are called “cosmos (world)” and planned orders are called “taxis (order).” All cultural evolution, like natural evolution, is the result of adaptation to unexpected events and contingent situations. Social development is to a great extent “unexpected” and “unavoidable.” Self-forming orders cannot be designed because they are produced permanently by people making many decisions independently of each other (to meet their own goals) in the complex knowledge environment. The market co-ordinates spontaneously the activities in a way that produces order (order-out-of chaos) . The economic gain and competitive advantage that occurs for some actors (individuals or groups) is communicated to others through the market, which can then adapt to these changes. This enhances evolution. Therefore, evolution is not a humanly guided process, but a “self-forming” process. Activities of individuals could benefit other individuals not known to them. Unconscious, self-reforming order in society and markets is one side of the coin. Without successful actions of conscious co-ordination, society wouldn’t be possible. Conscious, goal-directed production is a must for individuals and social beings. Humans must consciously identify their goals and find the means that lead to the achievement of these goals. This is simultaneously a conscious and a social process. Human society’s existence is a purposeful existence, a conscious generation, and adaptation to natural and societal environment [55,56,57,58].
Hayek, Luhmann, and other scientists have argued that human intervention into self-organizing systems is neither possible nor desirable. Humans must rely on competition and adaptation to environmental and systemic effects. On the contrary, Fuchs considers participatory (coordinated/cooperative) systems design as a good alternative to such a systemic “fatalism” [53]. Design is an evolving process that steadily integrates new knowledge about the world, which is based on experiences in nature and society. The same approach was adopted by Bernathy [62] who stated that: “The notion of empowering people to make decisions that affect their lives and their systems is a core idea of true democracy. Much of this power today is delegated to others.” Thus, for Banathy, the concept of participatory system design leads to a self-organizing and self-creating society.
Fuchs argued that cooperation in the strong sense is something much more than co-action that has the following characteristics [53]:
-
Cooperating actors are mutually dependent and have many shared goals
-
Cooperating actors can meet their goals faster and more efficiently than individually
-
Cooperation exploits communication about common goals and about how they can be reached and involves mutual learning and common production of new realities
-
Cooperation does not exclude conflicts that can be productive and constructive, if they are not escalated
-
Cooperation involves interconnected and networked activity. Mutual interconnectivity and responsibility emerge
All self-organizing social systems involve mutually productive relationships of actors and social structures, and, according to the different degrees and qualities of participation and cooperation, are classified into five types, namely:
-
Rigidly controlled systems
-
Deterministic systems
-
Purposive systems
-
Heuristic systems
-
Purpose-seeking systems
In conclusion, participation and cooperation are, according to Christian Fuchs, the two most effective (and democratic) methods for managing knowledge. The novel management principles refer to a new way of handling communication and social relationships, as well as their material effects in an organization. Social systems are self-organizing in the sense that order and knowledge emerge from “bottom-up” processes of cognition, communication, and cooperation. Self-organization is based on the creativity and activity of human being, and order emerges from decentralized “bottom-up” synergetic interactions. Managing knowledge is a basic task in KBS and can be performed in many different ways ranging between the two extremes of hierarchical management that is based on coercion control and steering and social design that is based on cooperation and participation.
13.9 Man-Made Self-organizing Controllers
13.9.1 A General Methodology
In Sects. 13.7 and 13.8, we have discussed the role of self-organization in society and revealed the self-organization features possessed by human-social systems. We saw that participation and cooperation are the two basic ways of managing social knowledge. Technological and industrial control systems are man-made systems that are designed so as to exhibit suitable performance characteristics of accuracy, speed, reliability, and energy use . Therefore, it should be useful if man-made systems are designed so as to be self-organizing, i.e., so as to possess all the fundamental properties exhibited by natural (not man-made) systems, which assures movement from a disordered state to an ordered one. The most fundamental property is that the structure and function of the system “emerge” from free interactions between the elements. The purpose must not be explicitly designed, programmed, or controlled, but the system components should interact freely with each other and with the environment. The system operation should be self-adaptive for the system to go to a “fit” or “preferable” configuration (attractor), and the system’s purpose to be generated is an “emergent” phenomenon (see Sect. 13.9.2).
A comprehensive study on the design and control of self-organizing systems is provided in [63]. A general methodology is presented and applied to design self-organizing traffic lights and self-organizing bureaucracies. This methodology receives the performance and operational requirements of a system and enables the designer to produce a system that satisfies the requirements. The methodology includes the following stages:
-
1.
Representation
-
2.
Modeling
-
3.
Simulation
-
4.
Application
-
5.
Evaluation
These steps are not necessarily distinct and sequential because the stages merge with each other in both forward and backward directions. Backtracking takes place whenever the designer needs to go again to a previous stage for reconsideration before completing an iteration (cycle). A brief outline of the above steps is the following.
Representation
In this step a specification (probably non-final) of the system components is selected. Actually, there may exist many different descriptions and one cannot say beforehand that a specific description is superior to another. Here the experience of the designer is crucial. The designer has to divide a system into elements (modules) with individual dynamics and goals and few interactions between elements. Dividing the system into modules implies division of the problem undergoing solution, which means that a complex task can be performed in parallel by different modules. If there exist only a few elements of interaction, then the more likely it is that the system will be understandable and predictable (i.e., the state space can be exhaustively analyzed), and the system complexity will be low. In this case, the use of traditional descriptive methods may be preferable. On the contrary, if the number of elements and interactions is high, or very high, the same is true for the system complexity, and the representation must be revised and improved before going to the modeling stage
Modeling
The model should be as simple as possible and predict as much as possible. Simple models offer a better understanding of a process than complex models. Here a control mechanism must be specified that will secure that the system will do what it is required to do. In a self-organizing system, this control should be internal and distributed. The control should also be adaptive since a non-adaptive control mechanism would not be able to face the changes inside and outside the system. This can be done if the control mechanism is actively searching for solutions. The system must be equipped with a capability to reduce friction and increase synergy. Reduction of friction can be achieved by one or a mix of courtesy, compromise, imposition (forced courtesy), eradication (a special case of imposition), and apoptosis (programmed death as happens to cells when they are no longer needed for an organism). An increase of synergy can be achieved by the following actions: cooperation, altruism, and exploitation (forced altruism)
Simulation
In this stage the model selected/developed in the modeling stage is simulated with appropriate computer programs. The aim of simulation is to test various scenarios and mediator strategies. The development of simulation must proceed from abstract to particular. An abstract scenario should be first tested and refined, before proceeding to a finer representation model. Simulation experiments should go from simple to extensive, i.e., proof of concept should be taken first, and then extensive studies should be followed. Simulation should reach mature state before taking the implementation into the real world.
Application
At this stage, the models(s) developed and tested in the previous stages are applied to a real system. This is a relatively easy task if the real system is a software system, but the application to a “material” (hardware) system will face many difficulties. Therefore the feasibility of application should be considered during all stages of design.
Evaluation
The evaluation of the various aspects of system performance is a necessity during the application course, in order to measure the performance and compare it with the performance of the previous system(s). The system should not decide, once and for all, that its operation/solution is the best and should be able to adapt itself to the changing requirements.
Obviously, the above general methodology for designing self-organizing systems is not unique. Many other methodologies might be developed and proposed. One of them is described in [64], which has been applied to design a simple self-organizing industrial controller. This controller uses the probability state variables (PSV) for the parameter identification, which gives a signal corresponding to the parameter. PSV can only identify a single parameter and so, in the multi-parameter case, several identification units should be employed. The system uses a “predictor” (actually a proportional-plus-derivative (PD) controller) which receives the system error e(t) and transmits as its output the predictor error ep (t) = e(t) + Tė(t). The self-organizing controller minimizes the integral absolute predictor error (IAE), and a performance assessment unit is used that performs this minimization employing the (+1) for encouragement and (-1) as punishment according to the equation [65, 66]:
The self-organizing feature of this controller is that no information about the sign of the controller output e p (t) is needed for the correct performance of the system. The controller is implemented in discrete-time (sample-data) form. The simulation results, obtained by strongly disturbing the system after reaching its steady state, showed that this controller produces very good results and can be used in practice. But obviously it is a simple controller which does not possess all the features of self-organization . A similar fuzzy controller is presented in [70, 71]. In the following, we will briefly describe the self-organizing traffic controller that was designed using the general methodology of Sect. 13.9.1 [63].
13.9.2 Self-organizing Traffic-Lights Control
Traffic congestion is one of the major problems of modern highly populated cities. To lessen the consequences of congestion, suitable traffic-control systems have been developed to regulate the flow of vehicles by not allowing them to go in any direction using traffic lights at street intersections. Of course, when car density saturates the streets, no traffic control is possible. Traffic systems are traditionally designed using mathematical, operational research, and computational methods to determine appropriate traffic policies (periods and phases of traffic lights) to optimize the overall system operation (time, energy consumption, driver patience, etc.). Unfortunately, despite the efforts to design intelligent traffic-light systems, many current traffic-light systems cannot cope with “abnormal” and “extreme” situations. Carlos Gershenson argued that traffic-light control is not so much an optimization problem, but rather an adaptation and self-organization problem. Optimization provides the best possible solution for a specific configuration and unchanged constraints. Therefore, an adaptive/self-organizing system is expected to provide a more efficient solution to the problem. The system proposed in [63] employs the general methodology outlined in Sect. 13.9.1. Specifically, the system considers the traffic lights as agents that want to “get rid” of cars as quickly as possible. To this end, they should avoid having green lights on empty streets and red lights on highly congestion streets. In the modeling phase, two classic methods were implemented, namely marching and optim, to compare their effectiveness with the sotl-request method. In the march-step model, all green lights are either southbound or eastbound and synchronized in time. The optim method is implemented trying to set the phases of traffic lights so that, as soon as a red light turns green, a car that was made to stop would find the following traffic light green. These two methods are nonadaptive because their operation is predetermined and does not take into account the actual state of the traffic. On the contrary, the sotl-request method enables the traffic lights to be sensitive to the current traffic condition, and, thus, respond to the needs of the oncoming vehicles. In the simulation, the march-step and optim methods were compared with the sotl-request method. The sotl-request method proved better for low-traffic densities, but very poor for high-traffic densities. For this reason, Gershenson has developed a new method, called sotl-platoon, which, before changing a red light to green, checks if a platoon is not crossing through, so as not to disperse it. In other words, a red light is not changed to green if, on the crossing street there is at least one car approaching at a given number of car-lengths from the intersection. The performance of the simulated model was measured using the following statistical figures:
-
Speed (cruise speed is one patch/per time step, i.e., the speed at which cars proceed without obstruction)
-
Percentage of stopped cars
-
Waiting time.
The conclusions of the simulation are very briefly summarized in the following bullet points. The details can be found in [63]:
-
The marching method is poor for low-traffic densities (with roughly less than three cars encountered between intersections) and has the best performance for very high densities (with more than eight cars between intersections)
-
The optim method has an acceptable performance for low densities, but for high densities cars may enter a gridlock much more quickly than with the other methods.
-
The sotl-request method has the best performance for low-traffic densities and for high traffic is very inefficient. This is because platoons (that are formed of observed sizes from 3 to 15 cars) can change red lights into green rapidly (in most cases, before actually arriving at the intersections), and there is a constant switching of lights, which reduces the speed of cars that are forced to stop on yellow lights and also breaks platoons (which has the result that the few cars passing have a higher probability of waiting longer at the next intersection).
-
The sotl-platoon method can keep platoons together resulting in full synchronization for a wide range of density. The full synchronization shows how self-organizing traffic lights form platoons that modulate traffic lights, so that average car speed is maximized, waiting times are minimized, and the cars are stopped in a robust way. Moreover, the self-organizing traffic lights are efficient without knowing beforehand the locations and densities of the cars.
A distributed self-organizing system for urban traffic control based on swarm-self-organizing maps is contained in [67]. This system overcomes the requirement of other distributed systems to have available a special mechanism for synchronization between intersections. The proposed architecture (Fig. 13.7) involves one signal controller at each intersection in the traffic system. Communication between these controllers is essential. This architecture consists of three subsystems, namely: (1) the traffic-signal control system (TSCS), (2) the simulator, (3) the map converter (MP), (4) the vehicle sensor, and (5) the light control as the main output of TSCS. The simulator is used for verification and testing TSCS. The map converter obtains information and intersections from traffic networks, which is sent as input to the TSCS for the computation process and to the simulator for the verification and testing process. The vehicle sensor (VS) is an application that aims to detect and calculate the number of vehicles that pass through an intersection. The traffic lights are controlled via three parameters, namely: “cycle time” [the time needed for a full signal-phase cycle (red-yellow-green)], “green split” (the percentage of green assigned for each direction in a cycle), and “offset” (the difference time between starting times and green phases on successive signals). There must be a correlation between adjacent intersections with others as shown in Fig. 13.8.

Architecture of self-organizing urban traffic-control system (http://www.s2is.org/Issues/v3/n3/papers/paper8.pdf)

a Generic traffic light model, b traffic-light model with correlation between intersections
Figure 13.8a, b shows a generic traffic light model used in the implementation of the control system.
This traffic controller was tested in an actual road scenario in Jakarta, and its performance was compared to the system used in the Jakarta Traffic Control System, giving favorable results.
Thirty tests were made using random input and simulation running times of 3 min. Another example of self-organizing traffic control systems that employs neural networks is described in [86].
13.10 Concluding Remarks
In this chapter, we have discussed a number of fundamental issues concerning the role of adaptation and self-organization in life and society. We started with a listing of adaptations of animals that enable them to live safely as much as possible and survive in their varying habitats. Then we discussed why the ecosystem falls within the framework of complex adaptive systems and the adaptation measures that are generally accepted as the minimum requirements to face the harmful impact of today’s fast climate change . Next, we provided a short description of the adaptability functions of the immune systems that assure successful defense of an organism against the invasions of pathogenic bacteria , fungi, viruses, and parasites. It was then explained that social-ecological systems operate in a way similar to the immune system with the aid of the so-called “social agents.” Next, we outlined the basic aspects of the theory of capital markets as complex adaptive systems.
On the self-organizing side of the chapter, we first argued that human society is actually a self-organizing system based on the processes of differentiation, institutionalization, reflexibility, and communication between individuals and groups. Then we reviewed the ideas of Christian Fuchs about how knowledge in self-organizing (re-creation) social systems would be managed. The three processes involved in knowledge are cognition, communication, and cooperation, and, according to Fuchs, the two most effective methods for managing a knowledge-based society are participation and cooperation. The chapter ended with Carlos Gershenson’s general methodology for designing man-made self-organizing systems and controllers and his case-study on the self-organizing control of traffic lights.
We close the chapter by mentioning three other very important areas of technological and societal application of adaptability and self-organization . These are:
-
The World-Wide Web
-
Bio-inspired self-organizing systems
-
Self-organizing multi-agent robotic systems.
The WWW has evolved as a complex adaptive and self-organizing system characterized by scaling phenomena of the “fractal” type. The amount of information on the Web is overwhelming. Its wide distribution, openness, and high dynamics make it a really complex system. To find the information one wants is a big challenge. Therefore, the open field to develop and implement systematic integrating mechanisms of self-adaptation and self-organization is a very attractive perspective [14, 68]. In [67], it is demonstrated that the WWW possesses all the principal features of self-organizing systems, namely recursion, attractors, bifurcations , self-reference, self-similarity , self-repair, and autonomous agent performance.
Figure 13.9 shows an inclusive picture of modern interconnected societal and technological applications at both local and remote levels. The interconnection is implemented by several communication networks (WLAN, UMTS, Internet , Ad Hoc, PAN, etc.).

Representation of locally and remotely networked societal applications (http://4.bp.blogspot.com/-mR56Wqvbe4E/Ti2avgRqIPI/AAAAAAAAAlU/_C_pi6_pKcM/s1600/SONS-ANTS.jpg)
-
Bio-inspired man-made self-organizing systems The principal task here is to find local behavior rules from which global properties emerge. Nature and biology offer many different examples of such rules of both the top-down (direct) and bottom-up (indirect) types. The visible differences between biological and technological solutions should be noted and exploited.
Lower living organisms (e.g., protozoa) do not have learning mechanisms and capabilities to interchange behavior during their lifetime. New behavior is stored via the genes of the next generation. In higher living organisms, the physical body and capabilities grow at most times as part of the solution [69, 70]. In technological systems, the hardware (which is the analog of the body) must be fixed very early in the design. If the man-made system is built with only the software part of the biological self-organization, the result may be less effective than the biological prototype. Thus, it is a mistake to adopt biological solutions only because they are more elegant. Here the field of artificial life is offering the needed concepts, principles, and possibilities.
-
Self-organization in multi-agent robotics This is a very active area of robotics initiated by R. Brooks [71, 72]. According to Brooks, the decomposition of intelligent systems is not meant to obtain independent information processing units that must interface with each other via representations. Actually, the system is decomposed into independent and parallel activity producers that all interface with the real world via perception and action. The performance of social insects is the result of collective intelligence, which was formalized and generalized by Sulis [73] as consisting of a large number of quasi-independent, stochastic agents, interacting locally both among themselves, as well as with an active environment, in the absence of hierarchical organization, and yet capable of adaptive behavior [74]. The local interactions in a self-organizing system may be based on direct communication among agents or on indirect communication via stimuli originating within the environment. In the 1950s, entomologist Piere-Paul Grase named this indirect interaction stigmergy [75]. Stigmergy combined with self-organization is called “stigmergic self-organization.” Stigmergy appears to be the basis of several collective behaviors in social insects. This concept has been studied by many researchers interested in multi-agent robotics; it has been integrated with evolution concepts, embodied agents concepts, and continuous-dynamic systems for designing “collectively intelligent and self-organized multi-robotic systems” [74]. This area of robotics will have many industrial and nonindustrial applications in modern society. Figure 13.10 shows three cases of experimental robot swarms studied within the European SYMBRION project. These intelligent, symbiotic multi-robotic systems are based on bio-inspired and modern computing paradigms. They can dock with each other, share energy and computational resources, and perform complex tasks such as autonomous navigation, perception of the environment, and grasping objects.
Fig. 13.10 
Three examples of robot swarms (http://www.ipvs.uni-stuttgart.de/abteilungen/bv/lehre/studentische_arbeiten/studienarbeiten/SO_industrial_micromontage/de)

Some other references in which the problem of designing man-made self-organizing systems has been treated via evolutionary methods, multidimensional Kiefer-Wolfowitz stochastic approximation, economic-political concepts, meta-data architecture techniques, and the ADELFE multi-agent technique are [76,77,78,79,80,81], respectively. Self-managing/self-organizing systems are defined and discussed in [82]. Three further references on fractals/chaos, self-organizing systems, and their relation to synergetics are [83,84,85].
References
J.S. Huxley, Evolution: The Modern Synthesis (Harper and Row, New York, 1942)
R.M. Burian, Adaptation: Historical Perspectives, in ed. by E.F. Keller, E.A. Lloyd (Harvard University Press, Cambridge, MA, 1992)
R.C. Lewontin, Adaptation. Sci. Am. 239(3), 213–230 (1978)
C.C. Williams, Adaptation and Natural Selection: A Critique of Some Current Evolutionary Thought (Princeton University Press, Princeton, NJ, 1966)
K. Schmidt-Nielsen, Animal Physiology: Adaptation and Environment, 5th edn. (Cambridge University Press, Cambridge, UK, 1997)
K. Noels, R. Yang, K. Saumure, Multiple Routes to Cross-Cultural Adaptation. in Proceedings Annual Meeting of the International Communication Association, Dresden, Germany, June 16, 2006. http://www.allacademic.com/meta/p92882_index.html (PDF 2009–05-25)
R. Kostelanetz, The Edge of Adaptation: Man and the Emerging Society (Better World Books, Mishawaka, IN, 2006)
D. Drbohlow, E. Janská, Immigrants and Their Adaptation Process in a New Host Society: On the Example of the Czech Republic. in Proceedings 2nd EAPS Conference of the Working Group on International Migration Europe, Rome, Italy, November 25–27, 2004
L. Shaw, Declining Human Fertility is Evolutionary Adaptatio. in Proceedings 22nd Annual Conference of the European Society of Human Reproduction and Embryology, 2004, www.eshre.com
H. Selye, The Stress of Life (Mc-Graw-Hill, New York, 1985). See Also: Adaptation to Stress and Natural Therapies, http://www.aapainmanage.org/literature/PainPrac/V10N3_Sandlow_AdaptationtoStress.pdf
R.M. Young, Mind, Brain and Adaptation in the Nineteenth Century: Cerebral Localization and Its Biological Context from Gall to Ferrier (Clarendon Press, Oxford, 1970; Reprinted: Oxford University Press, Oxford, 1990)
S.M. Saidam, On Route to an E-Society: Human Dependence on Technology and Adaptation Needs, http://www.comminit.com/en/node/242320/307
R.S. Lazarus, Emotion and Adaptation (Oxford University Press, Oxford, 2005)
M. Rupert, A. Rattrout, S. Hassas, The web from a complex adaptive systems perspective. J. Comput. Syst. Sci. 74(2),133–145 2008
T.Y. Choi, K.J. Dooley, M. Rungtusanatham, J. Oper. Manage. 19(3) 351–366 (2001)
L. Leydesdorff, Is society a self-organizing system? J. Soc. Evol. Syst. 16, 331–349 (1993)
Animal Adaptations, http://www2.scholastic.com/browse/article.jsp?id=2840, http://teacher.scholastic.com/dirtrep/animal/index.htm, http://www.woodlands-junior.kent.sch.uk/Homework/adaptation.htm. Eco-Academy: Maimi MetaZoo and Zoological Society of Florida, Florida
S.A. Levin, Ecosystems and the biosphere as complex adaptive systems. Ecosyst. Biomed. Life Sci. Earth Environ. Sci. 1 431–436, (1998)
S.A. Levin, Complex adaptive systems: Exploring the known, the unknown and the unknowable. Am. Math. Soc. 40, 3–19 (2003)
E. Bonabeau, Social insect colonies as complex adaptive systems, ecosystems. Biomed. Life Sci. Life Sci. Earth Environ. Sci. 1, 437–443 (1998)
G. Hartigsen, A. Kinzig, G. Peterson, Complex adaptive systems: Use and analysis of complex adaptive systems in ecosystem science: Overview of special section. Ecosyst. Biomed. Life Sci. Earth Environ. Sci. 1, 427–430 (1998)
M. Janssen, Use of complex adaptive systems for modeling global change. Ecosyst. Biomed. Life Sci. Earth Environ. Sci. 1, 457–463 (1998)
Environmental Change Institute (ECI). Oxford University, http://www.eci.ox.ac.uk/research/climate/adaptationsocieties.php
E.L. Schipper, M.P. Cigaran, M. McKenzie Hedger, Adaptation to Climate Change: The New Challenge for Development in the Developing World. in Environmental and Energy Group UNDP, (New York, July 2008)
Climate Change: Health and Environmental Effects EPA, New York, USA, http://www.epa.gov/climatechange/effects/adaptation.html
Joint Nature Conservation Committee, Living with Climate Change: Are there Limits to Adaptation? Conference Proceedings, http://www.jncc.gov.uk/page-4102, http://www.tyndall.ac.uk/research/programme3/adaptation2008/index.html
P. Berry, Adaptation Options on Natural Ecosystems (UNFCC Report), June 2007 http://unfcc.int/files/cooperation_and_support/financial_mechanism/application/pdf/berry.pdf
W. Easterling, B. Hurd, J. Smith, Coping with Global Climate Change: The Role of Adaptation in US. in Pew Center on Global Climate Change, (Arlington, VA, USA, 2004)
E.L. Cooper, Immune diversity throughout the animal kingdom. Bioscience 70, 720–722 (1990)
G. Beck, G.S. Habicht, Immunity and the invertebrates. Sci. Am. 275, 60–66 (1996)
T.W. McDale, C.M. Worthman, Evolutionary process and the ecology of human immune function. Am. J. Human Biol. 11, 705–717 (1999)
M.A. Janssen, E.E. Osnas, Adaptive capacity of social-ecological systems: Lessons from immune systems. EcoHealth 2, 1–10 (2005)
C.S. Holling, Resilience and stability of ecological systems. Ann. Rev. Ecol. Syst. 4, 1–23 (1973)
E. Ahmed, A.H. Hashish, On modeling the immune system as a complex system theory, Biosciences 124, 413–418 (2006)
J.C. Tay, A. Jhavar, CAFFISS: A Complex Adaptive Framework for Immune System Simulation. in Proceedings of 2005 ACM Symposium on Applied Computing (2005) pp 158–164
S. Forrest, A.S. Perelson, Genetic Algorithms and the Immune System. in Proceedings of 1st Workshop on Parallel Problem Solving from Nature, (Dortmund, Germany, 1991) pp 320–325
M.J. Mauboussin, Revisiting market efficiency: The stock market as a complex adaptive system, J. App. Corp. Finan. 14(4), 47–55 (2002)
W.B. Arthur, Asset Pricing Under Endogenous Expectations in an Artificial Stock Market. in The Economy of Evolving Complex Systems II, ed. by W.B. Arthur, S.N. Durlaf, D.A. Lane (Addison-Wesley, Reading, MA, 1997)
Electricity Markets are Complex Adaptive Systems, http://epress.anu.edu.au/cs/chap11Grozev-final-2.jpg
T. Parsons, The Structure of Social Action (Free Press, New York, 1968)
F. Geyer, J. Van der Zouwen, Cybernetics and social science: Theories and research in sociocybernetics. Kybernetes, 20(6) 81–92 (1991)
T. Imada, Self-Organization and Society (Springer, Berlin, 2009)
A. Giddens, Central Problems of Sociology (MacMillan, London, 1979)
N. Luhmann, Interpenetration-Zum Verhältnis Personaler und Sozialer Systeme, Zeitschrift fǘr Sociologie, 6, 62–76 (1978)
T. Parsons, Interaction and Social Systems, The International Encyclopedia of Social Sciences, vol. 7 (McGraw-Hill, New York, 1968) pp 429–441
Global Oneness, Society-Organization of Society, Encyclopedia II-Society, http://www.experiencefestival.com
T.S. Kuhn, The Structure of Scientific Revolutions (University of Chicago Press, Chicago, 1962)
I. Prigogine, I. Stengers, Order out of Chaos (Bantam, New York, 1984). (English translation of: ‘La Nouvelle Alliance, Gallimard, Paris, 1979)
H.R. Maturana, Biology of Language: The Epistemology of Reality. ed. by G.A. Miller, E. Lenneberg, Psychology and Biology of Language and Thought (Academic Press, New York, 1978) pp. 27–63
L. Leydesdorff, The static and dynamic analysis of network data using information. Theory. Soc. Netw. 13, 301–345 (1991)
L. Leydesdorff, ‘Structure/ action’ contingencies and the model of parallel distributed processing, J. Theory Soc. Behav. 23, 47–77 (1993)
L. Leydesdorff, Is society a self-organizing system? J. Soc. Evol. Syst. 16, 331–349 (1993)
C. Fuchs, Knowledge management in self-organizing social systems. J. Know. Manage. Pract. 5, May 2004. http://www.tlajnc.com/articl61.htm http://fuchs.uti.at/papers/social-theory/
W. Hofkirchner, Emergence and the logic of explanation: An argument for the unity of science. Acta Polytechnica Scandinavica-Math. Comput. Manage. Eng. Series 91, 23–30 (1998)
C. Fuchs, Social information and self-organization in the knowledge based society. Triple C, 1(2), 105–169 (2003). http://triplec.uti.at
C. Fuchs, Structuration theory and self-organization. Syst. Practice Action Res. 16(4), 133–167 (2003)
C. Fuchs, Co-operation and social self-organization. Triple C, 1(1), 1–52 (2003)
C. Fuchs, A. Schlemm, The Self-Organization Society, INTAS-Human Strategies in Complexity Research Report (University of Salzburg, Austria, November 30, 2002)
A. Giddens, The Constitution of Society (University of California Press, Berkeley, 1984)
C. Fuchs, W. Hofkirchner, Knowledge self-organization and responsibility. Kybernetes, 34(1–2), 244–260 (2005)
F.A.M. Hayek, The Fatal Conceit: The Errors of Socialism, in Collected Works, vol. 1 (Routledge, London, 1988)
B.A. Banathy, Designing Social Systems in a Changing World (Plenum Press, New York/London 1996)
C. Gershenson, Design and Control of Self-Organizing Systems (CopIt ArXives, Mexicocity/ Boston, 2007)
S.M.H. Jamarani, M.R. Hashemi Golpayegani, design of self-organizing system controller for industrial application, World Acad. Sci. Eng. Technol. 12, 14–18 (2005)
S.G. Tzafestas, G.G. Rigatos, Design and stability analysis of a new sliding mode fuzzy logic controller of reduced complexity. Mach. Intell. Rob. Control. 1(1), 27–41 (1999)
S.G. Tzafestas, G.G. Rigatos, A simple robust sliding–mode fuzzy logic controller of the diagonal type. J. Intell. Rob. Syst. 26(3–4), 353–388 (1999)
March W. Jatmiko, A. Azurat, et al., Self-organizing urban traffic control architecture with swarm-self-organizing map in Jakarta: Signal control system and simulator. Int. J. Smart Intell. Syst. 3(3) (2010)
W. Willinger, R. Govindan, S. Jamin, V. Paxson, S. Shenker, Scaling Phenomena in the Internet: Critically Examining Criticality. Proceedings of National-Academey Science USA, 99(1), pp 2573–2580 (2002). www.pnas.org/cgi/doi/10.1073/pnas012583099
D.L. Turcotte, J.B. Rundle, Self-organized complexity in the physical, biological and social sciences. PNAS, 99(1), 2463–2465 (2002)
S. Camazine, J. Deneubourg, N. Franks, J. Sneyd, G. Theraulaz, E. Bonabeau, Self-Organization in Biological Systems (Princeton University Press, Princeton, 2001)
R.A. Brooks, Intelligence Without Reason, AI Memo No. 1293, MIT, AI Lab., MA, 1991; Also: Proceedings of IJCAI-91, Sydney, Australia (J. Mylopoulos and R. Reiter, eds.), pp 569–595 (Morgan Kaufmann San Mateo, CA, USA, 1991)
R.A. Brooks, Intelligence without representation, Artificial Intell. 47(1–3), 139–159 (1991)
W. Sulis, Fundamental concepts of collective intelligence, Nonlinear Dyn. Psychol. Life Sci. 1(1), 35–53 (1997)
E. Izquierdo-Torres, Collective Intelligence in Multi-Agent Robotics: Stigmergy, Self-Organization and Evolution (University of Sussex, Brighton U.K., Jan 2004)
P.P. Grassé, La Reconstruction du Nid et les Coordinations Interindividuelles Chez Bellicositermes Natalensis et Cubitermes Sp. La Theorie de la Stigmergie: Essai D’ Interpretation du Comportoment des Termites Constucteur. Insects Sociaux, 6, 41–83 (1959)
I. Fehérvári, W. Elemenreich, Design of Self-Organizing Systems Using Evolutionary Methods. in Proceedings of Junior Scientist Conference (JSC’08), (Vienna, Austria, 2008) pp 53–54
P.C. Badavas, G.N. Saridis, A performance-adaptive self-organizing control of a class of distributed systems, IEEE Trans. Syst. Man Cybern. 1(1), 105–110 (1971)
D. Chistilin, Principles of Self-Organization and Sustainable Development of the World Economy are the Basis of Global Security Institute World Economy and International Relations, Ukraine Academy of Sciences, www.necsi.edu/iccs6/viewpaper.php?id=280, www.aiecon.org/conference/aescs2009/articles/AESCS2009-17.pdf
G. Di. Marzo Serugendo, J. Fitzerald, A. Romanovsky, N. Guelfi, A Metadata-Based Architectural Model for Dynamical Resilient Systems. in Proceedings of ACM Symposium on Applied Computing (SAC’07), (2007) pp 566–572
R. Frei, G. Di Marzo Serugendo, J. Barata, Designing Self-Organization for Evolvable Assembly Systems. in Proceedings IEEE International Conference on Self-Adaptive and Self-Organizing Systems (SASO’08), (IEEE Computer Science, New York, 2008)
G. Picard, M.-P. Gleizes, The ADELE Methodology—Designing Adaptive Cooperative Multi-Agent Systems. in The Agent–Oriented Software Engineering: Methodologies and Software Engineering for Agent Systems (Kluwer, Boston, 2004) pp 157–176
G. Mühl, M. Werner, M.A. Jaeger, K. Herrmann, H. Parzyjegla, On the Definitions of Self-Managing and Self-Organizing Systems. In Proceedings of SAKS 2007: KiVS-2007 Workshop Selbstorga-nisierende, Adaptive Kontextsensitive Vezteilte Systeme Bern, Switzerland (Springer Verlag, March 1, 2007)
D.L. Turcotte, Fractals and Chaos in Geology and Geophysics (Cambridge University Press, Cambridge, U.K., 1997)
H. Von Foester, On Self–Organizing Systems and Their Environments. in ed. by M.C. Yovitts S. Cameron, Self-Organizing Systems (Pergamon, Oxford, 1960) pp 31–50
H. Haken, Synergetics and the Problem of Self-Organization. in ed. by G. Roth H. Schwegler, Self-Organizing Systems: An Interdisciplinary Approach (Campus Verlag, Frankfurt/ New York, 1981) pp 9–13
T. Nataksuji, T. Kaka, Development of a self-organizing traffic control system using neural network models. Transpor. Res. Board. 1324, 137–145 (1991)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG
About this chapter

{kind=link}
{kind=link}
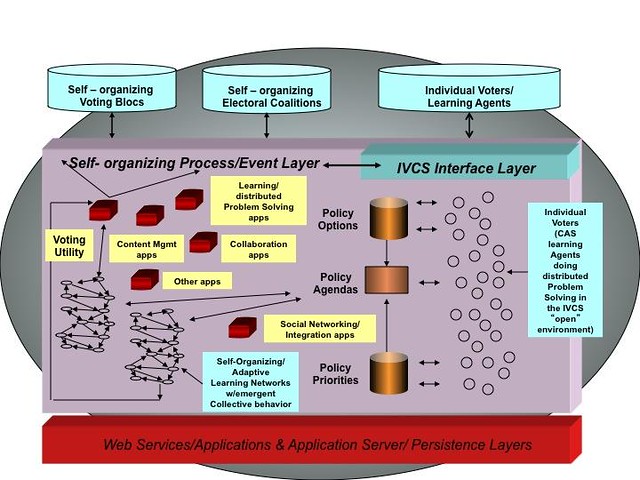{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Cite this chapter
Tzafestas, S.G. (2018). Adaptation and Self-organization in Life and Society. In: Energy, Information, Feedback, Adaptation, and Self-organization. Intelligent Systems, Control and Automation: Science and Engineering, vol 90. Springer, Cham. https://doi.org/10.1007/978-3-319-66999-1_13
Download citation
DOI: https://doi.org/10.1007/978-3-319-66999-1_13
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-66998-4
Online ISBN: 978-3-319-66999-1
eBook Packages: EngineeringEngineering (R0)