
Abstract
In this paper, a novel form of general line-symmetric Bricard linkage (GLSBL) that can be deployed onto arbitrary non-equilateral triangular profile and can be folded onto a bundle compact form with all the six links being parallel and contact to each other is presented. The mobility and detailed kinematic of the mechanism is studied. Using the novel GLSBL, a tripod mechanism using two similar deployable special form Bricard linkages as its bases connecting to three limbs is proposed. The tripod mechanism can be deployed onto triangular prism profile and can also be folded onto a bundle compact form so that it can be used as the basic building modules for the construction of large deployable trussed surface structures. Using this module, the deployable structure that can be deployed onto a spherical surface is presented.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Deployable structures are widely used in both aerospace applications and general civil engineering applications [1, 2]. In most design, planar mechanisms such as scissor shape mechanisms are selected as basic building elements for the construction of large deployable truss structures. Spatial mechanisms are rarely used in practical applications, the reason is probably due to the mathematical difficulty in finding solutions which ensure that the mobility of each building element is retained [3]. The spatial single loop mechanisms are good candidates for aerospace applications, as they can provide very good stiffness, low packaging/expansion ratio and easily be extended to large scale deployable networks [4]. In this paper, a novel deployable mechanism that can be deployed from a bundle compact configuration onto a large volume spherical surface structure is presented. The mechanism is constructed by a set of tripod basic deployable modules that is using two special forms of general line-symmetric Bricard mechanisms as its bases. The basic module can be deployed onto triangular prism profile with its bases can be designed into arbitrary non-equilateral triangular profile so that it can be used for constructing arbitrary surface structure. The rest of this paper is organized as follows: in Sect. 70.2, the novel deployable triangular prism mechanism is proposed; in Sect. 70.3, the kinematic of the proposed mechanism is studied; In Sect. 70.4, the construction of large surface deployable network using the triangular prism mechanism is presented and a conclusion to this paper is given in the last section.
2 Proposed of the Triangular Prism Deployable Mechanism
As reported by Bricard [5], there are six different types of mobile linkages containing six revolute joints. Of the six types, two types, i.e., the trihedral case and the general plane-symmetric case, can be used for the deployable mechanisms that can be folded onto a bundle compact form [6]. In this paper, we show that a third type mobile 6R linkage, the general line-symmetric case can also be applied to design the deployable mechanisms.
The general D–H model of 6R linkage is as shown in Fig. 70.1, for the general line-symmetric case, the geometric constraints are given as
where \( X_{i} \) is the common perpendicular of \( {\text{z}}_{\text{i}} \) and \( {\text{z}}_{\text{i + 1}} ,\;\alpha_{ij} \) is the rotation angle of axes \( {\text{z}}_{\text{i}} \) and \( {\text{z}}_{\text{i + 1}} \) around \( X_{i} ,\,R_{i} \) is the distance of link \( i - 1 \) and link \( i \) along \( {\text{z}}_{\text{i}} \), refers as the offset of joint \( i. \) Ref. [6] has presented the possibility of using a trihedral case Bricard mechanism to design deployable mechanism that can be deployed onto ‘Y’ shape profile. As shown in Fig. 70.2, it can be folded onto a bundle compact form as shown in Fig. 70.2b. For this mechanism, one can see that the link pairs \( \left( {a,\,f} \right),\;\left( {b,\,c} \right),\;\left( {d,\,e} \right) \) of the mechanism can be designed with arbitrary length without changing the mobility of the mechanism, in the deployed configuration, three angles \( \angle AOB,\,\angle BOC \) and \( \angle COA \) are identical.

A general D–H model of 6R linkage

The Bricard mechanism that can be deployed onto “Y” shape profile. a Deployed configuration, b folded configuration
The GLSBL can also be designed to be deployable onto such “Y” shape deployed profile by using the joint axis position determination method as presented in [4]. Suppose that ABC is the required triangular deployed profile, for this case, however, the three angles \( \angle AOB,\;\angle BOC \) and \( \angle COA \) are no longer identical because the D–H lengths of the six links are not identical, so that the mechanism can be designed with non-equilateral triangular profiles, but the physical link of the six links for GLSBL can be designed with identical lengths. This is an important property for the construction of tripod deployable module.
As shown in Fig. 70.3, \( AO,\,BO \) and \( CO \) are the three joint axes of GLSBL connecting to the adjacent two parallel links. Let\( AG = BH = CI \), i.e., all the lengths of the physical links are identical. \( DG,\,GF,\,FI,\,IE,\,EH,\,HD \) are the widths of the six physical links, \( DG = HD,\,GF = FI,\,IE = EH \). As all the links are designed with rectangular shape in the top view, then \( AG \bot DF,\,BH \bot DE,\,CI \bot EF \) and extension lines of \( AG,\,BH,\,CI \) are concurrent at the point \( O \) so that the point \( O \) is the center of the inscribed circle of \( \Updelta DEF \). By changing the widths of the physical links, one can obtains different values for the angles \( \angle AOB,\;\angle BOC \) and \( \angle COA \) so as to realize different profile of the triangular \( ABC \).

Top view of GLSBL in deployed configuration. a Top view of deployed configuration, b bundle compact form
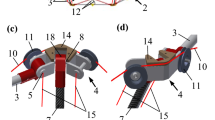
In order to build deployable mechanisms that can be deployed onto a surface structures, such as spherical surface or parabolic surface, the triangular prism mechanical modules with non-equilateral triangular base profiles are required, because any surface can be approximated by a set of triangular profiles [1]. Fig. 70.4 shows a conceptual model of a trussed surface structure that is consisted of triangular prism, \( ABC \) and \( A'B'C' \) are the two bases for one module. In the complicated surface, however, the parameters for the modules in the assembled structure are different from each other, this fact makes the mobile assembly of large deployable mechanism very difficult. Using GLSBL as the bases of the prism, one can easily construct a tripod mechanism as shown in Fig. 70.5. GLSBL and three long links forms the bases of the tripod and joints \( {\mathbf{k}}_{i} (i = 1,\;2,\;3) \) connect GLSBL and the long links. For simplicity, the direction of joint \( {\mathbf{k}}_{i} (i = 1,\;2,\;3) \) is along \( {\mathbf{z}}_{i} (i = 1,\;3,\;5) \), respectively, as shown in Fig. 70.5. It can be deployed onto a triangular prism deployed profile from a bundle compact form with all the links being parallel and contact to each other. As we can also use the trihedral Bricard linkage to design a non-equilateral triangular base profile with different physical link lengths, but in the tripod mechanism, it is required that the lengths of all physical links being identical, therefore, only the GLSBL case can be applied to this deployable tripod mechanism.

A conceptual model of a surface truss consisted of triangular prism

The CAD model of the proposed triangular prism mechanism module. a Theoretic model, b deployed configuration, c folded configuration
3 Kinematic Analysis of the Tripod Mechanism
As shown in Fig. 70.6, \( DG,\;GF,\;FI,\;IE,\;EH,\;HD \) are the DH length of links, \( Q \) is the concurrent point of the axes \( {\mathbf{z}}_{2} ,\;{\mathbf{z}}_{4} ,\;{\mathbf{z}}_{6} ,\;P \) is another concurrent point of axes \( {\mathbf{z}}_{1} ,\;{\mathbf{z}}_{3} ,\;{\mathbf{z}}_{5} \). Based on Eq. (70.1), there are three pairs of the DH links are identical, i.e., \( DG = HD,\;GF = FI,\;IE = EH \). Based on the geometric relations, one can prove that the three points \( P,\,O \) and \( Q \) are collinear and perpendicular to \( \vartriangle \,GHI \). Then we have \( QG = QH = QI,\,PG = PH = PI \).

Geometry of general line-symmetric 6R mechanism
From Fig. 70.1 and Fig. 70.6, one can conclude that \( \theta_{1} + \angle DGF = \pi ,\;\theta_{3} + \angle DHE = \pi ,\;\theta_{5} + \angle EIF = \pi \), then we have
.
Similarly
.
From Eq. (70.2) we have
.
Substituting Eq. (70.8) into Eqs. (70.2–70.7) yields the relations of \( \theta_{3} ,\,\theta_{5} \) and \( \theta_{1} \). Similarly, \( \theta_{2} = \angle GDH + \pi ,\;\theta_{4} = \angle HEI + \pi ,\;\theta_{6} = \angle IFG + \pi , \) then
.
From Eq. (70.9) we have
.
Equation (70.10) expresses the relations of \( \theta_{2} ,\;\theta_{4} ,\;\theta_{6} \). Then from D–H loop equation, we have the closure equation:
.
In Eqs. (70.9) and (70.10), there are three equations what include four variables, that can also prove that the general line-symmetric 6R mechanism has only one DOF.
In this research, it is assumed that the lateral profile of the triangular prism is isosceles trapezoid, i.e., all the \( L_{s} \) s in one module are identical.
From Fig. 70.7, one can see that
\( P \) is the concurrent point of the three axes \( {\mathbf{z}}_{1} ,\;{\mathbf{z}}_{3} ,\;{\mathbf{z}}_{5} ,\;\overrightarrow {PM} \) and \( \overrightarrow {PN} \) are the two vectors along \( {\mathbf{z}}_{3} \) and \( {\mathbf{z}}_{1} \) respectively, \( \alpha = \angle GPH, \)
\( L_{2} \) contains two parts, link length of Bricard \( L_{c1} , \) second part is length of \( PG,\;PH,\;PI \)
.

Parameters of the tripod mechanism. a The triangular prism profile, b lateral view of the prism
\( L_{1} \) is the width of the lateral link, \( \gamma \) is the obliquity of the lateral link, \( \beta \) is the angle of \( GH \) with respect to the radius of circumcircle of \( \vartriangle GHI. \) The edges of \( \vartriangle GHI \) are \( 2L^{\prime} \sin \left( {\theta_{2} /2} \right)L,\,2L^{\prime} \sin \left( {\theta_{4} /2} \right) \) and \( 2L^{\prime} \sin \left( {\theta_{6} /2} \right) \) respectively. \( L^{\prime} \) is length of \( PG \). \( \theta_{2} ,\;\theta_{4} ,\;\theta_{6} \) can be derived from Eq. (70.10). Given edges \( l_{1} ,\,l_{2} ,\,\,l_{3} \) for one triangle, the radius of its circumcircle can be given as
.
Then \( \beta \) can be calculated by
where \( l_{i} \) is edge of triangle, using Eqs. (70.12–70.16), one can obtain the relation of \( \beta \) and \( \theta_{2} . \) From Fig. 70.7b, we can obtain the relation:
where \( \phi \) is the angle of \( L_{u} \) and \( L_{s} \), then we can derive the relation of \( L_{u} \) and \( \theta_{2} . \) The relation for the other base and the whole tripod mechanism can be derived using similar approach.
4 Mobile Assembly of the Large Trussed Surface Structure
Based on the conceptual trussed surface structure given in Fig. 70.4, one can see that in order to construct a modular trussed structure, every two adjacent triangular prisms are sharing one common lateral profiles, in order to build a “continuous and smooth” surface, the lateral profile of one module that is used to connected to the adjacent one must be identical, therefore, as soon as the parameters of one module, i.e., module 1 as given in Fig. 70.9 are determined, the parameters of the two lateral links of module 2 can be determined too. Based on the kinematic analysis as given in Sect. 70.3, the three lateral links of each tripod mechanism are not parallel to each other, therefore, every adjacent two modules can be connected via the common revolute joints, as shown in Fig. 70.8, u 1 and u 2 are the two axes of the revolute joints used for the mobile connections. The mechanism includes two modules still has two DOFs because no more constraints into the mechanism after connection.

Mobile connection of the adjacent two modules
Given a required surface for the deployed configuration, one has first to employ an efficient way for the description of the surface structure. In this paper, the projection method is used to determine the parameters of the discretized surface. As the basic building modules are triangular prisms, to design a module in the structure, the first step is to design the parameters of one base, as shown in Fig. 70.9, \( A'B'C' \) is the triangular profile that one has to design first, in order to determine the parameters, it is assumed that there is a planar model with a set of identical triangular profiles, then the planar model is projected onto the required surface, every node of the planar model will intersect with the surface in one point, connected every two points if they are connected in the planar model, then one obtains the discretized surface model. In order to reduce the manufacturing cost, one has to make maximum number of identical modules in the structure, therefore, the projection direction can be set to be along the center normal direction of the surface, for example, \( M \) is the center of the required surface, then the normal direction \( {\mathbf{n}} \) of the surface in point \( M \) is the projection direction. This projection makes that all the bases symmetric around the direction \( {\mathbf{n}} \) are identical.

Projections onto required surface
Using this method, a spherical surface structure based on the proposed tripod mechanism as shown in Fig. 70.10a, it can be folded onto a bundle compact form with all the links being parallel and contact to each others as shown in Fig. 70.10b. In the deployed configuration, the bases of the tripod mechanism form two discretized surfaces, the inner one is determined via the method as shown in Fig. 70.9. The directions of the lateral links are set to along the directions toward the spherical centre.

Spherical deployed configuration of the mechanism. a Deployed configuration, b folded configuration
5 Conclusions
In this paper, a novel tripod deployable mechanism for constructing large surface deployable antenna structure has been presented. The tripod modules of the deployable mechanism uses two similar general line-symmetric Bricard mechanisms as its bases, both of which are connected by three limbs so that the mechanism can be deployed onto a triangular prism deployed profile and can be folded onto a bundle compact form with all the links being parallel and contact to each other. The projection method for constructing the surface structure has also presented in this paper, which assumed that there is a planar model with a set of identical triangular profiles, then the planar model is projected onto the required surface, every node of the planar model will intersect with the surface in one point, connected every two points if they are connected in the planar model, then one obtains the discretized surface model. Using this method, a surface structure was assembled by CAD model to show its feasibility.
References
Gantes CJ (2001) Deployable structures: analysis and design. WIT Press, Boston
Puiga L, Barton A, Rando N (2010) Review: a review on large deployable structures for astrophysics missions. In Acta Astronautica 67(1–2):12–26
Chen, Y (2003) Design of structural mechanism. PhD dissertation, University of Oxford
Deng, Z, Huang, H, Li, B, Liu, R (2011) Synthesis of deployable/foldable single loop mechanisms with revolute joints. ASME J Mech Robotics, 3/031006, August
Bricard, R (1927) Leçons de cinématique. In: Tome II cinématique appliquée, Gauthier-Villars, Paris, 7–12 1927
Chen Y, You Z, Tarnai T (2005) Three fold-symmetric Bricard linkages for deployable structures. In: International journal of solids and structures 42(8):2287–2301
Acknowledgment
This work is financially supported by the National Science Foundation of China (Project No. 50935002 and 51175105).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2012 Springer-Verlag London
About this paper
Cite this paper
Cui, J., Huang, H., Li, B., Deng, Z. (2012). A Novel Surface Deployable Antenna Structure Based on Special Form of Bricard Linkages. In: Dai, J., Zoppi, M., Kong, X. (eds) Advances in Reconfigurable Mechanisms and Robots I. Springer, London. https://doi.org/10.1007/978-1-4471-4141-9_70
Download citation
DOI: https://doi.org/10.1007/978-1-4471-4141-9_70
Published:
Publisher Name: Springer, London
Print ISBN: 978-1-4471-4140-2
Online ISBN: 978-1-4471-4141-9
eBook Packages: EngineeringEngineering (R0)