
Abstract
Deployable structure has played a more and more important role in the large-caliber antennas. This paper deals with the degree of freedom (DOF) and kinematics of a kind of deployable truss antenna composed of tetrahedral elements. Firstly, based on the reciprocal screw theory the DOF of one tetrahedral element is analyzed. Then, the equivalent mechanism of the minimum composite unit of the deployable truss antenna is obtained according to the characteristic of the DOF of the tetrahedral element. Sequentially, the DOF of the deployable truss antenna is derived. Further, the analytical expressions of the positions and velocities of the connection nodes of the antenna during its deploying/folding process are formulated by resorting to the coordinate transformation matrices. Finally, the correctness of the kinematic analysis of the deployable truss antenna is verified by simulation based on the Adams software.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Demand for the large-caliber antennas is increasing with the rapid development of the aerospace science and technology. However, the caliber of antennas is severely restricted by limited volume of the launch vehicle. As a result, spatial deployable structures have been widely applied in the large-caliber antennas [1, 2], which have the advantages including higher precision, smaller launch volume and higher reliability for deployment. Basically, deployable antennas can be divided into three categories: mesh, solid surface and inflatable antennas, among which the mesh antenna is the most common type.
The mesh antenna is mainly composed of a reflective metallic mesh and a deployable supporting structure. For this kind of antennas, the most critical part is the deployable supporting structure. There is a large amount of literatures focusing on the deployable structures at present. Wang et al. [3] proposed a two-step topology structure synthesis approach to design novel pyramid deployable truss structures. A structure-electronic synthesis design method of antennas is given in [4]. The literatures [5–8] paid attention to the configuration design of polyhedral linkage for deployable truss structure. Zheng et al. [9] proposed a new conceptual structure design for large deployable spaceborne antennas based on a folded fixed truss hoop reflector. You [10] demonstrated a generic solution for construction of deployable structures in any shape of rotational symmetry. The optimization of antennas was demonstrated in [11, 12]. Besides, Yu et al. [13] accomplished the motion analysis of deployable structures using the finite particle method. Moore-Penrose generalized inverse method is applied to the kinematic analysis of deployable toroidal spatial truss structures for large mesh antenna [14]. Xu et al. [15, 16] addressed the structural design, kinematic and static analysis of a double-ring deployable antenna. What’s more, Li et al. [17] used the absolute nodal coordinate formulation to analyze the flexible body dynamics of deployable structures under different temperatures to simulate space environments. Afterwards, Li [18] presented the kinematic, dynamic analysis and control methods of a hoop deployable antenna.
To sum up, most of the above-mentioned literatures focused on the structural design, kinematic and dynamic analysis of deployable structures. There are few investigations on the methods for degree of freedom (DOF) analysis of the deployable structures applied in the antennas. It is well known that getting the number of the DOFs for mechanisms is the most fundamental understanding to a mechanism. However, deployable antenna structure is constituted by a large number of deployable elements through some regular structural topology, which increases the complexity and difficulty of the mobility analysis for this kind of deployable structures. In this work, the DOF of a deployable structure assembled by tetrahedral elements for space truss antennas is analyzed based on the reciprocal screw theory, and the correctness of the mobility analysis is verified by simulation.
2 DOF Analysis of the Deployable Truss Antenna
2.1 Structure of the Deployable Truss Antenna
The deployable truss antenna consists of a large number of basic tetrahedral elements, as shown in Fig. 1. Each tetrahedral element contains four connection nodes, three swing-struts with identical length, and three foldable and deployable struts. Both ends of the struts are connected to the nodes by revolute joints (R), and each foldable and deployable strut is made up of two struts with identical length connected by an R joint, as shown in Fig. 2. For the purpose of analysis, the tetrahedral element shown in Fig. 2 is denoted by H-ABC, where the letter H represents the top node and the other letters denote the three nodes located at the undersurface of the tetrahedral element. The axes of all R joints of the tetrahedral element H-ABC are respectively denoted by S i (i = 1, 2, …, 15). Then, the geometric characteristics of the S i can be expressed as: \( {\varvec{S}}_{1} \parallel {\varvec{S}}_{2} \parallel {\varvec{S}}_{3} \bot {\varvec{AB}} \), \( {\varvec{S}}_{4} \parallel {\varvec{S}}_{5} \parallel {\varvec{S}}_{6} \bot {\varvec{AC}} \), \( {\varvec{S}}_{7} \parallel {\varvec{S}}_{8} \parallel {\varvec{S}}_{9} \bot {\varvec{BC}} \), \( {\varvec{S}}_{10} \parallel {\varvec{S}}_{11} \bot {\varvec{AH}} \), \( {\varvec{S}}_{12} \parallel {\varvec{S}}_{13} \bot {\varvec{CH}} \), and \( {\varvec{S}}_{14} \parallel {\varvec{S}}_{15} \bot {\varvec{BH}} \). Besides, the S 11, S 13 and S 15 are coplanar and perpendicular to the planes AOH, COH and BOH, respectively, where the point O represents the circumcenter of the triangle ABC.

Deployable truss antenna

Schematic diagram of the tetrahedral element
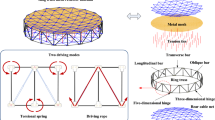
The minimum composite unit of the deployable truss antenna is constituted by three tetrahedral elements, as shown in Fig. 3. Then the whole deployable truss antenna shown in Fig. 1 can be obtained by extending the minimum composite units from the central axis of the antenna. The reflecting surface of the antenna spliced by the minimum composite units is shown in Fig. 4, in which the triangle planes are the undersurface of the tetrahedral elements and the color hexagons represent the minimum composite units.

Schematic diagram of the minimum composite unit

Reflecting surface of the antenna spliced by the minimum composite units
2.2 DOF Analysis of the Tetrahedral Element
In order to analyze the DOF of the tetrahedral element, it is firstly divided into two parts in this section, as shown in Fig. 5. Then, the DOF of the first part is derived based on the reciprocal screw theory. Finally, the DOF of the tetrahedral element can be obtained after considering the constraint influence of the second part.

Two parts of the tetrahedral element
The first part of the tetrahedral element can be regarded as a parallel mechanism (PM) composed of a fixed node A, a moving node B, and two supporting limbs. One limb connects the node B to the node A by three R joints (i.e., S 1, S 2 and S 3), denoted by the limb RRR. The other limb consists of a closed-loop kinematic chain containing seven R joints (i.e., S 4, S 5, S 6, S 12, S 13, S 11 and S 10) and a serial chain RR (i.e., S 14 and S 15), denoted by the limb (7R)-RR. A fixed coordinate frame A-xyz is attached to the center of the node A, with x-axis perpendicular to the BA, y-axis pointing along the BA, and z-axis determined by the right-hand rule, as shown in Fig. 5.
The closed-loop kinematic chain in the limb (7R)-RR can also be treated as a PM containing a fixed node A, a moving node H, two supporting limbs, RR (i.e., S 10 and S 11) and RRRRR (i.e., S 4, S 5, S 6, S 12 and S 13). The constraint wrenches imposed on the node H by the limbs RR and RRRRR can be expressed in the A-xyz as

where, \( \left( {\begin{array}{*{20}c} {a_{2} } & {b_{2} } & {c_{2} } \\ \end{array} } \right) \), \( \left( {\begin{array}{*{20}c} {a_{4} } & {b_{4} } & 0 \\ \end{array} } \right) \) and \( \left( {\begin{array}{*{20}c} {a_{5} } & {b_{5} } & 0 \\ \end{array} } \right) \) denote the direction vectors of the S 4, S 10 and S 12, \( \left( {\begin{array}{*{20}c} {x_{10} } & {y_{10} } & {z_{10} } \\ \end{array} } \right) \) and \( \left( {\begin{array}{*{20}c} {x_{11} } & {y_{11} } & {z_{11} } \\ \end{array} } \right) \) represent the position vectors of the centers of the joints S 10 and S 11, respectively.
The twist of the node H which is reciprocal to the constraint wrenches shown in Eq. (1) is solved as

where,  represents a translation perpendicular to both the S
10 and the AH.
represents a translation perpendicular to both the S
10 and the AH.
It can be known from Eq. (2) that the closed-loop kinematic chain within the limb (7R)-RR is equivalent to a translation joint P, so that the limb (7R)-RR can be substituted by the limb PRR. The constraint wrenches imposed on the node B by the limb PRR can be obtained as

where, \( a = b_{4} \left( {x_{11} - x_{10} } \right) - a_{4} \left( {y_{11} - y_{10} } \right) \), \( c = b_{4} \left( {z_{11} - z_{10} } \right) \), and \( y_{10} + y_{14} = y_{11} + y_{15} \),  represents the constraint couple parallel to the z-axis,
represents the constraint couple parallel to the z-axis,  is the constraint couple located in the plane xAy and perpendicular to the S
14, and
is the constraint couple located in the plane xAy and perpendicular to the S
14, and  denotes the constraint force passing through the point \( \left( {\begin{array}{*{20}c} {\frac{{\left( {y_{14} - y_{10} } \right)a_{4} }}{{2b_{4} }} + x_{10} } & {\frac{{y_{10} + y_{14} }}{2}} & {z_{10} } \\ \end{array} } \right) \) and along the direction \( \left( {\begin{array}{*{20}c} a & 0 & c \\ \end{array} } \right) \), in which \( \left( {\begin{array}{*{20}c} {x_{10} } & {y_{14} } & {z_{10} } \\ \end{array} } \right) \) and \( \left( {\begin{array}{*{20}c} {x_{11} } & {y_{15} } & {z_{11} } \\ \end{array} } \right) \) represent the position vectors of the centers of the joints S
14 and S
15, respectively.
denotes the constraint force passing through the point \( \left( {\begin{array}{*{20}c} {\frac{{\left( {y_{14} - y_{10} } \right)a_{4} }}{{2b_{4} }} + x_{10} } & {\frac{{y_{10} + y_{14} }}{2}} & {z_{10} } \\ \end{array} } \right) \) and along the direction \( \left( {\begin{array}{*{20}c} a & 0 & c \\ \end{array} } \right) \), in which \( \left( {\begin{array}{*{20}c} {x_{10} } & {y_{14} } & {z_{10} } \\ \end{array} } \right) \) and \( \left( {\begin{array}{*{20}c} {x_{11} } & {y_{15} } & {z_{11} } \\ \end{array} } \right) \) represent the position vectors of the centers of the joints S
14 and S
15, respectively.
Similarly, the constraint wrenches imposed on the node B by the limb RRR can be derived as

where, \( \left( {\begin{array}{*{20}c} {a_{1} } & 0 & {c_{1} } \\ \end{array} } \right) \) denotes the direction vector of the S
1, \( \left( {\begin{array}{*{20}c} {x_{1} } & {y_{1} } & 0 \\ \end{array} } \right) \) represents the position vector of the center of the joint S
1,  represents the constraint couple parallel to the y-axis,
represents the constraint couple parallel to the y-axis,  is the constraint couple located in the plane xAz and perpendicular to the S
1, and
is the constraint couple located in the plane xAz and perpendicular to the S
1, and  is the constraint force passing through the point \( \left( {\begin{array}{*{20}c} 0 & {y_{1} } & 0 \\ \end{array} } \right) \) and parallel to the S
1.
is the constraint force passing through the point \( \left( {\begin{array}{*{20}c} 0 & {y_{1} } & 0 \\ \end{array} } \right) \) and parallel to the S
1.
By combining Eqs. (3) and (4) all constraint wrenches suffered by the node B can be obtained. According to the reciprocal screw theory the twist of the node B can be derived as

where  represents a translation along the y-axis, which shows that the node B has a translational DOF with respect to the fixed node A.
represents a translation along the y-axis, which shows that the node B has a translational DOF with respect to the fixed node A.
As similar as the above solving process, it can be known that the node C also has a translational DOF with respect to the node A. On the condition of considering the constraint influence of the second part of the tetrahedral element, the tetrahedral element can be equivalent to the mechanism shown in Fig. 6. It can be easily obtained that the number of the DOFs of the equivalent mechanism is one.

Equivalent mechanism of the tetrahedral element
2.3 DOF of the Deployable Truss Antenna
According to the analysis in Sect. 2.2 the equivalent mechanism of the minimum composite unit shown in Fig. 2 can also be formulated, as shown in Fig. 7.

Equivalent mechanism of the minimum composite unit
Assuming that the foldable and deployable strut BG is removed from the equivalent mechanism shown in Fig. 7 and the joint connecting the node B to the node A is selected as the actuated joint, then the nodes C, D, E, F and G will move as the movement of the node B, as shown in Fig. 8. According to the characteristic of the DOF of the tetrahedral element there exist the following relations:

Configuration of the mechanism shown in this figure after movement
From Eq. (6) it can be gotten that \( \frac{{AB_{1} }}{AB} = \frac{{AG_{1} }}{AG} \), which will not be restricted after connecting the foldable and deployable strut BG to the nodes B and G. Therefore, the minimum composite unit also has one DOF.
Based on the structural topology relationship of the minimum composite unit, we can derive that the number of the DOFs of the whole deployable truss antenna shown in Fig. 1 also is one. That is to say, only the positions of the connection nodes of the deployable truss antenna are changing during its deploying/folding process, but their orientations keep constant.
3 Kinematic Analysis of the Deployable Truss Antenna
3.1 Position and Velocity Analysis of the Tetrahedral Element
It can be known from the analysis mentioned in Sect. 2 that the orientations of the connection nodes are unchangeable during the deploying/folding process of the antenna. Consequently, the kinematic sketch shown in Fig. 9 is used to analyze the position and velocity variations of the nodes of the tetrahedral element.

Kinematic sketch of the tetrahedral element
As shown in Fig. 9, a reference coordinate system H-xyz is attached to the node H with x-axis parallel to the BA and z-axis along the OH. Then the following equation can be obtained:
where, \( \cos \alpha_{1} = l_{1} \sin \left( {\alpha_{1} + \alpha_{2} } \right)/l_{2} \), \( \cos \left( {\alpha_{1} + \alpha_{2} } \right) = \left( {l_{1}^{2} + l_{3}^{2} - l_{2}^{2} } \right)/\left( {2l_{1} l_{3} } \right) \), l 1, l 2 and l 3 represent the length of the struts AM (BM), AN (CN) and BK (CK), respectively, \( \varphi \) denotes half of the angle between the BM and AM, α 1 (α 2) is the constant angle between the BO and BA (BC).
Besides, there exists that
in which l denotes the length of the swing-struts HA, HB and HC.
Then the position vectors of the nodes A, B and C expressed in the H-xyz can be derived as
where \( \beta = 2\alpha_{2} + \alpha_{1} \).
The angular velocities of the swing-struts HA, HB and HC can be computed by
where, r 1, r 2 and r 3 represent the unit normal vectors of the planes AOH, BOH and COH, respectively, and \( \dot{\theta } \) can be gotten by taking the derivative of Eq. (8) with respect to time as
On the basis of Eqs. (9) and (10) the velocities of the nodes A, B and C can be calculated as
3.2 Position and Velocity Analysis of the Minimum Composite Unit
The kinematic sketch of the minimum composite unit is shown in Fig. 10. A reference coordinate system A-XYZ is attached to the node A with Z-axis being vertically placed and X-axis located in the plane AO 1 H and having an angle γ 1 with respect to the AO 1. Three body-fixed coordinate frames O j -x j y j z j (j = 1,2,3) are assigned at the circumcenters O j of the triangles ABC, ADE and AFG, with x j -axis coinciding with the O 1 A, O 2 A and O 3 A, and z j -axis point along the O 1 H, O 2 I and O 3 J, respectively, and y j -axis are determined by the right-hand rule.

Kinematic sketch of the minimum composite unit
In the light of the analysis in Sect. 3.1 the position vectors of the nodes B, C and H expressed in the O 1-x 1 y 1 z 1 are
in which, \( M_{1} = \tan \,\alpha_{1} \sin \,\alpha_{1} - \cos \,\alpha_{1} \) and \( M_{2} = \cos \,\beta - \sin \,\beta \,\tan \,\alpha_{1} \), \( {}^{H}{\varvec{P}}_{B} \) and \( {}^{H}{\varvec{P}}_{C} \) represent the position vectors of the nodes B and C expressed in the H-xyz, respectively, \( {}_{H}^{{O_{1} }} {\varvec{R}} \) is the orientation matrix of the H-xyz with respect to the O 1-x 1 y 1 z 1, which can be formulated by \( {}_{H}^{{O_{1} }} {\varvec{R}} = R\left( {{\varvec{z}},\alpha_{1} } \right) \).
By resorting to the coordinate transformation matrix the position vectors of the nodes B, C and H can be expressed in the A-XYZ as
where, \( {}_{{O_{1} }}^{A} {\varvec{R}} \) is the orientation matrix of the O 1-x 1 y 1 z 1 with respect to the A-XYZ, which can be computed by \( {}_{{O_{1} }}^{A} {\varvec{R}} = R\left( {{\varvec{Y}},\gamma_{1} } \right) \), and \( {}^{A}{\varvec{P}}_{{O_{1} }} \) is the position vector of the point O 1 expressed in the A-XYZ, which can be calculated by
Substituting Eqs. (13) and (15) into Eq. (14) yields
Then taking the derivative of Eq. (16) with respect to time and taking Eq. (11) in mind leads to
which just are the velocity vectors of the nodes H, B and C during the deploying/folding process of the minimum composite unit.
In the same way, the position and velocity vectors of the remaining nodes of the minimum composite unit can be derived. Thus, in view of the structural topology relationship of the minimum composite units and the coordinate transform matrices, the kinematic analysis of the whole antenna can be easily accomplished.
4 Numerical Calculation and Simulation Verification
4.1 Verification on the DOF Analysis
The simulation model of a deployable truss spherical antenna composed of 27 tetrahedral elements is shown in Fig. 11. On the condition that one of the R joints of the 27 tetrahedral elements is actuated, the deployable truss antenna can be completely folded, as shown in Fig. 12, which effectively verifies the correctness of the DOF analysis of the deployable truss antenna.

Deployable truss antenna composed of 27 tetrahedral elements

Folded configuration of the antenna
4.2 Verification on the Kinematic Analysis
A set of structure parameters of the minimum composite unit are given as: l = 0.59 m, l 1 = l 2 = 0.250376 m, l 3 = 0.25 m, and γ 1 = γ 2 = γ 3 = 3.623°, where γ 2 (γ 3) represents the angle between the O 2 A (O 3 A) and the plane XAY. The minimum composite unit is folded from the initial configuration with \( \varphi_{0} = 66.829{}^{ \circ } \). Let \( \varphi = \varphi_{0} - 0.5^{\circ} t \), then the simulation values of the positions and velocities of all nodes can be measured by the Adams software. The theoretical value and simulation result of the position variation of the node F and that of the velocity variation of the node I are given in Fig. 13 as representatives.

a Position variation of the node F, b Velocity variation of the node I
It can be seen from Fig. 13 that the simulation results and the theoretical values of the nodes F and I are basically consistent, and the errors between the theoretical values and the simulation ones of all nodes are less than 2 %, which effectively shows the correctness of the kinematic analysis of the deployable truss antenna.
5 Conclusions
In this work, an approach based on the reciprocal screw theory for the DOF analysis of the deployable truss antenna assembled by tetrahedral elements is presented, which greatly reduces the complexity and difficulty on the mobility analysis of this kind of mechanisms with multiple coupling-loops. The tetrahedral element is divided into a PM and a serial kinematic chain. On the basis of the numbers and characteristic of the DOF of the divided PM, the tetrahedral element with multiple coupling-loops is converted to a single-loop mechanism, as a result, the minimum composite unit of the antenna is also simplified, which contributes to the investigation on the DOF of the whole deployable truss antenna. In addition, according to the topological relationship of the antenna and the coordinate transformation matrices the position and velocity vectors of the connection nodes of the antenna during its deploying/folding process are derived. What’s more, the simulation model of a deployable truss spherical antenna composed of 27 tetrahedral elements is built, and the simulation results on the DOF and kinematics of the antenna indicate the correctness of the theoretical analysis.
In view of the folded configuration of the deployable truss antenna shown in Fig. 13, future works are suggested: if the tetrahedral element mentioned in this paper is applied to the curved antenna, such as, parabolic or spherical antenna, a portion of R joints of the tetrahedral element need to be changed in order to achieve a smaller stowed volume.
References
Cherniavsky AG, Gulyayev VI, Gaidaichuk VV, Fedoseev AI (2005) Large deployable space antennas based on usage of polygonal pantograph. J Aerosp Eng 18:139–145
Fazli N, Abedian A (2011) Design of tensegrity structures for supporting deployable mesh antennas. Sci Iran 18:1078–1087
Wang Y, Deng ZQ, Liu RQ, Yang H, Guo HW (2014) Topology structure synthesis and analysis of spatial pyramid deployable truss structures for satellite SAR antenna. Chin J Mech Eng Engl Ed 27:683–692
Xu Y, Guan FL (2013) Structure–electronic synthesis design of deployable truss antenna. Aerosp Sci Technol 26:259–267
Gosselin CM, Gagnon-Lachance D (2006) Expandable polyhedral mechanisms based on polygonal one-degree-of-freedom faces. Proc Inst Mech Eng Part C J Mech Eng Sci 220:1011–1018
Kiper G, Söylemez E, Kişisel A (2008) A family of deployable polygons and polyhedral. Mech Mach Theory 43:627–640
Wei GW, Ding XL, Dai JS (2011) Geometric constraint of an evolved deployable ball mechanism. J Adv Mech Des Syst Manuf 5:302–314
Ding XL, Yang Y, Dai JS (2013) Design and kinematic analysis of a novel prism deployable mechanism. Mech Mach Theory 63:35–49
Zheng F, Chen M (2015) New conceptual structure design for affordable space large deployable antenna. IEEE Trans Antennas Propag 63:1351–1358
You Z (2000) Deployable structure of curved profile for space antennas. J Aerosp Eng 13:139–143
Dai L, Guan FL, Guest James K (2014) Structural optimization and model fabrication of a double-ring deployable antenna truss. Acta Astronaut 94:843–851
Tanaka H (2006) Design optimization studies for large-scale contoured beam deployable satellite antennas. Acta Astronaut 58:443–451
Yu Y, Luo YZ (2009) Motion analysis of deployable structures based on the rod hinge element by the finite particle method. Proc Inst Mech Eng Part C J Aerosp Eng 223:955–964
Zhao ML, Guan FL (2005) Kinematic analysis of deployable toroidal spatial truss structures for large mesh antenna. J Int Assoc Shell Spatial Struct 46:195–204
Xu Y, Guan FL, Zheng Y, Zhao ML (2012) Kinematic analysis of the deployable truss structures for space applications. J Aerosp Technolog Manage 4:453–462
Xu Y, Guan FL, Chen JJ, Zheng Y (2012) Structural design and static analysis of a double-ring deployable truss for mesh antennas. Acta Astronaut 81:545–554
Li TJ, Wang Y (2009) Deployment dynamic analysis of deployable antennas considering thermal effect. Aerosp Sci Technol 13:210–215
Li TJ (2012) Deployment analysis and control of deployable space antenna. Aerosp Sci Technol 18:42–47
Acknowledgments
This research was sponsored by the National Natural Science Foundation of China under Grant 51675458 and Grant 51275439.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer Nature Singapore Pte Ltd.
About this paper
Cite this paper
Liu, W., Xu, Y., Zhao, Y., Yao, J., Han, B., Chen, L. (2017). DOF and Kinematic Analysis of a Deployable Truss Antenna Assembled by Tetrahedral Elements. In: Zhang, X., Wang, N., Huang, Y. (eds) Mechanism and Machine Science . ASIAN MMS CCMMS 2016 2016. Lecture Notes in Electrical Engineering, vol 408. Springer, Singapore. https://doi.org/10.1007/978-981-10-2875-5_70
Download citation
DOI: https://doi.org/10.1007/978-981-10-2875-5_70
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-2874-8
Online ISBN: 978-981-10-2875-5
eBook Packages: EngineeringEngineering (R0)