
Abstract
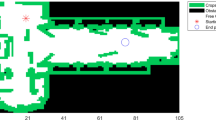
The problem of planning reference trajectories for agricultural machines is considered. A path planning algorithm to perform various kinds of farm-works is described. The case of convex fields is first considered. A direction of work being given, the algorithm determines the turning areas and selects a trajectory which guarantees the complete field coverage while minimizing overlapping. The method is extended to the case of fields with more complex shape including possibly obstacles. Simulations are proposed to illustrate the reasoning.
Access provided by Autonomous University of Puebla. Download to read the full chapter text
Chapter PDF
Similar content being viewed by others


Author information
Authors and Affiliations
Editor information
Rights and permissions
Copyright information
© 2006 Springer-Verlag Berlin Heidelberg
About this chapter
Cite this chapter
Taïx, M., Souères, P., Frayssinet, H., Cordesses, L. (2006). Path Planning for Complete Coverage with Agricultural Machines. In: Yuta, S., Asama, H., Prassler, E., Tsubouchi, T., Thrun, S. (eds) Field and Service Robotics. Springer Tracts in Advanced Robotics, vol 24. Springer, Berlin, Heidelberg. https://doi.org/10.1007/10991459_53
Download citation
DOI: https://doi.org/10.1007/10991459_53
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-540-32801-8
Online ISBN: 978-3-540-32854-4
eBook Packages: EngineeringEngineering (R0)