
Abstract
In this paper, control and performance of an active islanding detection method have been analyzed using q-axis controller. The detection approach is based on disturbance injection via q-axis controller, which measures the mean absolute frequency variation of the voltage at the point of common coupling (PCC). Islanding identification provided by the q-axis controller method found to be efficient and reliable. The efficacy of the islanding identification method has been tested in the MATLAB/Simulink 18.0(a), for load of quality factor (Qf = 2.5) and analyzed. It offers the several contributions/benefits, viz. the islanding identification time is 180 ms (which is better than several other techniques in the literature), which correctly distinguishes between non-islanding and islanding scenarios, compatible with all international standards.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Nowadays, the renewable energy sources (RES) based distributed generation (DG) has been increased substantially in the distribution grid. The most practical DG technology during the past ten years has been grid-connected photovoltaic systems, which have advantages in terms of installation, less maintenance cost, economical, sustainable sources, and green energy such as ecological friendly and can be harnessed for DG [1]. Despite the benefits of solar PV, they also pose some risks; as a result, the grid integration of DG necessitates protection and safety concerns in the distribution network [2].
In order to ensure the safety, the detection of the island operations of distributed generators has become very important. Microgrid islanding arises as a consequence of breakers accidentally tripping, resulting in a significant threat to the safety of staff, damage to the equipment of utilities, consumers, etc. Islanding refers to a situation where energized DGs are disconnected from the bulk power grid, providing power only to the local loads for the time being [3, 4]. The rapid detection of an islanding activity is a compulsory requirement, for seamless connection to preserve the stability of the procedure and supplying likewise, critical demand of loads. Methods of island detection (IDMs) are broadly divided into remote and local categories. In the literature [5, 6], the remote islanding detection method has been proposed by Bayrak et where-as remote IDTs which are not suitable for small microgrids because of the increased investment due to communication system. It is possible to apply these reliable and fast schemes to synchronous- as well as inverter-based DGs. However, the increased burden due to expense is recognized as the key constraint [7,8,9].
Local islanding detection technique (IDT) is usually limited to the common coupling point (PCC) and different parameters are monitored and evaluated for decision-making, such as voltage, current, frequency [10, 11]. There are three kinds of local IDTs: passive, active, and hybrid techniques. Recent passive approaches are illustrated by a few examples in the literature [12, 13]. Although these solutions can be applied easily and cheaply, they have a large non-detection zone (NDZ) or circumstances where power generation and consumption are nearly matched but not detected by islanding. Another difficulty is choosing a threshold value of algorithm for island detection, which is the trade-off between false tripping and minimum non detection zone (NDZ). To extract features from the frequency domain, a number of mathematical approaches have been employed. A magnitude of frequency-dependent impedance-related data for the passive IDT has been proposed in the literature [11]. To identify islanding, the inverter's output voltage's content of ripple is analyzed in the time domain [6]. In [11], the criteria for island detection are voltage and PCC harmonic characteristics. Including positive feedback to active IDT's different inverter control parameters, such as voltage, frequency, and phase angle, consequences an unstable system when the inverter is controlled and the grid is disconnected. To enhance the NDZ and PQ degradation, hybrid method including two local IDMs has been developed. Under standard operating circumstances, the standard of power has not been impacted [14, 15]. Nonetheless, difficulty and costs are still regarded as the biggest disadvantages in the hybrid methods of IDMs. For the purpose of detecting islands depending on reactive power and load control approach, Laghari et al. have presented a hybrid strategy [16].
In this paper, an active islanding detection islanding detection system using q-axis controller, has been developed and implemented in MATLAB/Simulink. Further, performance has been analyzed. Approach is based on idist injection via q-axis, which measures mean absolute frequency variation in PCC voltage that passes through the bandpass filter. Islanding identification technique has been analyzed and validated using MATLAB/Simulink 18.0(a), for loads with quality factor (Qf) of 2.5.
The following are the major contribution/benefits of the islanding detection method.
-
(1)
For the load of (Qf = 2.5), identification time is 180 ms.
-
(2)
Finds unintentional island creation more quickly than many earlier works.
-
(3)
Correctly distinguishes between non-islanding and islanding scenarios.
-
(4)
Compatible with all international standards.
-
(5)
It can identify islanding for all loads up to the quality factor (Qf) = 2.5.
2 Test System Configuration
Single-line diagram of RES-based microgrid is shown in Fig. 1 which comprises three DGs, out of which one is SPV-based, second is wind energy conversion-based, and third is fuel-cell-based DG, which are connected with parallel load at the PCC. Furthermore, in the present study, to analyze the control and performance of the islanding detection system, the test system has been developed for one DG, load, and grid to minimize the complexity. The test setup has been shown in Fig. 2, respectively, which comprises one DG (SPV system), and load at PCC is integrated to the grid. The load is adjusted to be in resonance with the 50 Hz system frequency. To facilitate the islanding identification capability, DG is integrated with the proposed islanding detection technique.

Single-line diagram of RES-based microgrid

Grid-integrated PV-based microgrid
3 d–q Control for Islanding Detection
d–q axes’ current controllers regulate real and reactive powers supplied by the VSC, respectively. The equations are given below:
The following are the current equations for the inverter output:
In the present study, an investigation method is proposed along with the injection of a sinusoidal waveform working as a disturbance signal at a single frequency via q-axis controller. Disturbance signal frequency is injected into the grid, to test for the islanding formation. Furthermore, for an active islanding detection, the equations are reframed as:
In this investigation, a single 20 Hz signal of magnitude equal to 1% of rated id is applied to the VSC. To perform VSC at unity power factor, Idref is set to 0. Under perfectly matched power conditions (between the solar PV system and load demand), frequency responses with and without injecting disturbance of current signal via q-axis show that without the injection of the current disturbance, the frequency variation on post-islanding is negligible. Because of this, the majority of passive islanding detection are inefficient at detecting the island formation. Only in post-islanding conditions, the current disturbance injection significantly changes the frequency of the voltage signal [17–19]. To determine whether the frequency variation is caused by islanded or non-islanded conditions, the frequency is further evaluated. Figure 3 depicts the entire block diagram for inverter's d–q current controllers.

Block diagram of d–q active control
4 Active Islanding Detection Technique
A good research technique should be able to distinguish exactly between the island and non-island conditions in addition to being able to identify the islanding condition more quickly. Therefore, one such investigation technique based on the integration of BPF and AFVmean is studied and validated in the present work.
4.1 Bandpass Filter
In the event that the grid frequency deviates more than 0.5 Hz, the active islanding detection technique identify whether island or mal- identify.
4.2 Absolute Frequency Variation (Mean)
Absolute output of BPF is used to calculate AFVmean, which is presented as follows:
T is period of time of injected wave and t is instantaneous time.
4.3 Phase-Locked Loop (PLL)
The PLL is used to determine the frequency of the PCC voltage, angular frequency, and the theta needed for transformation from abc to dq0 and vice versa.
4.4 Threshold Settings
Figure 2 depicts the test system, simulated for solar PV and load ratings under perfectly matched power conditions (between solar PV system and load demand). Peak frequency variations are observed and recorded for post-islanding circumstances. The AFV and AFVmean are then calculated using Eq. (6).
It is important to note that simulations show that peak frequency deviation for any well-matched solar PV system and load demand is roughly equal to Qf = 2.5. As a result, the threshold is set at 95% of the derived AFVmean values, as shown in Table 1. The following generalized expression to estimate peak variation in frequency with respect to Qf under perfectly matched power state is given below in Eq. (7):
The loads of Qf = 2.5 have been recommended for use by several standards and are therefore threshold 0.037 has been used in this paper.
4.5 Islanding Detection Signal
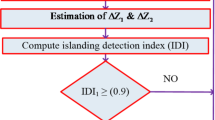
The PLL is used in simulations to determine the frequency of the Vpcc voltage. Furthermore, estimated frequency is passed through the BPF, and the output is taken as an absolute value. AFVmean is then calculated using Eq. (6). For the purpose of comparing the stable value to the threshold, AFVmean is computed. Logic 1 represents the islands’ formation, if the AFVmean surpasses the thresholds for the duration more than 90 m, while remaining is at logical “0” if the estimated AFVmean falls below the threshold and indicates the non-islanded state in less than 90 ms. Figure 4 depicts islanding detection system, the deliberate time delay is 90 ms, and it is calculated using simulations under adverse scenario and several literature surveys. The intentional time delay is required so that the islanding detection technique does not mistakenly identify transients as being on an island when they are not. The proposed technique's step-by-step process in Fig. 5 is depicted.

Islanding detection technique

Flowchart of control algorithm
5 Case Study: Islanding Under Perfectly Matched Power Condition
Frequency deviation is negligible without current disturbance injection while island generation, the islanding detection technique is evaluated in this section under critical state (between the solar PV system and load, i.e., perfectly matched power). Consequently, the optimal power condition is tested for Qf = 2.5. Solar PV system is islanded along with the local load from the distribution grid at 0.2 s. For the completely matched power condition in grid-connected and islanded modes, the waveform and response of frequency are shown in Figs. 6 and 7, respectively. Even in the case of a perfectly matched power state, islanding detection is proficient of locating the islanding development in less than 180 ms.

Waveform: PCC voltage, inverter current, and load current

Response: a PCC voltage, b inverter current, and c load current
6 Conclusion
In this paper, an investigation technique was analyzed along with the implementation of active islanding identification though q-axis control based on disturbance injection.
The islanding identification is provided by the q-axis controller method and tested in the MATLAB/Simulink 18.0(a), under the load quality factor (Qf = 2.5). It offers the several benefits, viz. the islanding identification time is 180 milliseconds. Furthermore, correctly distinguishes between non-islanding and islanding scenarios, compatible with all international standards. It is found that islanding technique is very effective efficient and reliable. However, the islanding detection system can be employed for multiple DGs, and further research is being carried out to extend up to 33 and 66 bus systems.
References
Kumar A, Garg R, Mahajan P (2022) Performance improvement of grid-integrated PV system using novel robust least mean logarithmic square control algorithm. Electr Eng. https://doi.org/10.1007/s00202-022-01552-1
Murugesan S, Murali V, Daniel SA (2018) Hybrid analyzing technique for active islanding detection based on d-axis current injection. IEEE Syst J 12(4):3608–3617. https://doi.org/10.1109/JSYST.2017.2730364
Mahdi M, Istemihan Genc VM (2019) A real-time self-healing methodology using model—and measurement-based islanding algorithms. IEEE Trans Smart Grid 10(2):1195–1204. https://doi.org/10.1109/TSG.2017.2760698
Alam MR, Muttaqi KM, Bouzerdoum A (2018) Characterization of voltage dips and swells in a DG-embedded distribution network during and subsequent to islanding process and grid reconnection. IEEE Trans Ind Appl 54(5):4028–4038. https://doi.org/10.1109/TIA.2018.2833056
Liu N, Diduch C, Chang L, Su J (2015) A reference impedance-based passive islanding detection method for inverter-based distributed generation system. IEEE J Emerg Select Topics Power Electron 3(4):1205–1217
Guha B, Haddad RJ, Kalaani Y (2016) Voltage ripple-based passive islanding detection technique for grid-connected photovoltaic inverters. IEEE Power Energy Technol Syst J 3(4):143–154
Merino J, Mendoza-Araya P, Venkataramanan G, Baysal M (2015) Islanding detection in microgrids using harmonic signatures. IEEE Trans Power Del 30(5):2102–2109
Colombage K, Wang J, Gould C, Liu C (2017) PWM harmonic signature-based islanding detection for a single-phase inverter with PWM frequency hopping. IEEE Trans Ind Appl 53(1):411–419
Reigosa D, Briz F, Blanco C, Guerrero JM (2017) Passive islanding detection using inverter nonlinear effects. IEEE Trans Power Electron 32(11):8434–8445
Makwana YM, Bhalja BR (2019) Experimental performance of an islanding detection scheme based on modal components. IEEE Trans on Smart Grid 10(1):1025–1035
Haider R, Hwan Kim C, Ghanbari T, Bukhari SBA, Zaman MS, Baloch S, Sik Oh Y (2018) Passive islanding detection scheme based on autocorrelation function of modal current envelope for photovoltaic units. IET Gener Transm Distrib 12(16):3911
Mishra RK, Choudhary A, Fatima S, Mohanty AR, Panigrahi BK (2022) A fault diagnosis approach based on 2D-vibration imaging for bearing faults. J Vib Eng Technol, 1–14
Palariya AK, Choudhary A, Yadav A (2016) Modelling, control and simulation of MPPT for wind energy conversion using Matlab/Simulink. Eng J Appl Scopes 1(2):9–13
Tomar A et al (eds) (2022) In: Proceedings of 3rd international conference on machine learning, advances in computing, renewable energy and communication: MARC 2021, vol 915, pp XV, 781, Springer Nature, ISBN: 978-981-19-2830-7. https://doi.org/10.1007/978-981-19-2828-4
Ahmad MW et al (eds) (2022) Intelligent data analytics for power and energy systems. Springer Singapore, pp XXII, 641. ISBN: 978-981-16-6081-8. https://doi.org/10.1007/978-981-16-6081-8
Murugesan S, Murali V (2020) Disturbance injection based decentralized identification of accidental islanding. IEEE Trans Ind Electron 67(5):37–67
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2024 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Kumar, A. (2024). Control and Performance Analysis for Active Islanding Detection Using q-Axis Control in Renewable Energy Sources Based Microgrid: A Review. In: Malik, H., Mishra, S., Sood, Y.R., Iqbal, A., Ustun, T.S. (eds) Renewable Power for Sustainable Growth. ICRP 2023. Lecture Notes in Electrical Engineering, vol 1086. Springer, Singapore. https://doi.org/10.1007/978-981-99-6749-0_39
Download citation
DOI: https://doi.org/10.1007/978-981-99-6749-0_39
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-6748-3
Online ISBN: 978-981-99-6749-0
eBook Packages: EnergyEnergy (R0)