
Abstract
There can be serious and harmful effects on people following a fall event due to its severity. This paper presents a real-time fall detection using sensor fusion to improve the overall accuracy of the system when subjected to continuous operation. The system combines data from accelerometer and an ultrasonic sensor to detect falls in real time. The developed mobile application accurately identifies fall scenarios and sends SMS notifications to emergency contacts. The proposed system's ultrasonic sensor module has wireless communication capabilities, while the accelerometer readings are acquired from the smartphone. Appropriate feature, threshold values, and program flow have been chosen, such that fall detection is accurate, and the system is operational even if one of the sensor malfunctions. The proposed system has been validated experimentally and the accuracy, sensitivity, and specificity are 87.5%, 89.47%, and 94.74%, respectively.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
40.1 Introduction
As compared to only 10% in 2000, the United Nations Population Division estimates this number will rise to 21% in 2050 [1]. The growing number of older people poses increasing challenges for the Ministry of Health, especially in developing countries that have fewer health services and higher spending. A fall is defined as the unexpected contact of the human body with the ground and is a common occurrence in the elderly as they age. With population growth and technological advances, great minds have worked consistently and meticulously to develop solutions to minimize the problem of falls among the elderly. In order to effectively eliminate the problem of falling, various research techniques and technologies have been introduced, such as: The benefit of using these solutions is that it reduces the risk of serious injury in the elderly from unexpected falls. The main disadvantage identified is that these solutions require time and money, which means that developing countries cannot afford the facilities offered to older people [2].
This paper proposes the development of a low cost real-time fall detection system by utilizing the idea of sensor fusion. In particular, the proposed system uses the accelerometer and ultrasonic sensor readings to indicate fall scenarios in real time. The processing of these sensor signals are governed by the developed mobile application that is able to accurately detect the fall scenario and automatically send SMS notification to the emergency contact. It should be noted that only the wireless communication module has been developed for the ultrasonic sensor, while the accelerometer sensor readings are acquired from the mobile phone itself, which runs the application. The proposed system is designed in such a way that the fall detection is classified accurately by validating across two sensor readings. This idea of sensor fusion has been implemented to solely counter inaccuracies during continuous detection. Worth mentioning is that the system has additional backup routines that can switch to only work with one sensor to detect fall in cases where one of the sensors malfunctions.
40.2 Background
Falls are a major problem in the modern world as they are considered to be the most serious and deadly activity for people aged 60–65. Falls in the elderly occur for a variety of reasons and result in different outcomes, and awareness of these causes and outcomes helps R&D engineers of fall prevention systems to come up with effective solutions to the problem of falls in the elderly [3].
The purpose of fall detector applications is to prevent falls and alert individuals when a fall is likely to occur. This particular fall detection system uses wearable electronic sensors that must be worn by the user on their clothing and consists of two parts: accelerometers attached to the body and a built-in accelerometer in a smartphone [1]. Wearable devices that use smartphone accelerometers have an advantage because most smartphones have sensors such as cameras, microphones, GPS, and digital tools that can help reduce falls in elderly people. The objective of the proposed system is to address the issue of falls during daily activities like walking, sitting, or standing. By utilizing a smartphone system, the movements of your body are recorded, and the resulting data can be analyzed to enhance the system's performance by identifying variances in movement. The human body produces a substantial amount of data when in motion, and acceleration is deemed to be the most significant type of data for detecting falls due to the laws of physics. This is because the acceleration of a body is closely linked to the force acting on it, and during a fall, the force on the body changes correspondingly, making acceleration data an appropriate choice for fall detection [4]. Using acceleration-based fall detection systems can help reduce falls among the elderly and can be easily adopted by a large number of users.
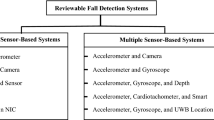
The main goal of the system described in [5] is to detect falls and alert monitoring personnel to reduce the risk of injury. According to the researchers of [5], fall detection can be categorized into three types: camera vision, wearable devices, and ambience sensors. In this particular system, ultrasonic sensor arrays are utilized to detect falls. The proposed solution classifies fall scenarios and positions by analyzing changes in distances recorded by the ultrasonic sensors. Two arrays of ultrasonic sensors, placed at different locations in the room, are used to detect the position of the human body during a fall. The sensors measure the movement and positioning of the body, and the different distance calculations of the recorded pulses are used for fall detection and gesture classification. The human body activity can be divided into five positions which are standing, sitting, lying, running, and jumping. The data received from the ultrasonic sensors has been used to determine these activities. Various falling positions can result in different types of injuries, with forward falls typically causing leg and knee injuries, backward falls leading to severe head injuries, and side falls causing broken bones, ligament damage, and internal complications. The proposed approach incorporates an ultrasonic sensor with a frequency of approximately 40 kHz, employing an 8-pulse waveform. The sensor transmits a Tx pulse signal to the object, then receives the Rx signal that is reflected back to the sensor, enabling the distance to be measured by calculating the time between the reflector targets and the sensor [5]. To install the system on the ceiling and side panels, an ESP8266-07 Wi-Fi module, which is a small and power-efficient module, is utilized. This module also supports a broad range of ESP8266 clients, APs, and + APs [5]. The microcontroller plays a critical role in the system, as it controls both the sensor and the Wi-Fi module, with Arduino microcontrollers serving as the sending and receiving systems. The proposed system comprises two modules, namely the hardware and software modules. The hardware module stores and processes information from the sensors, while the software module determines case conditions and provides monitoring capabilities.
Moreover, as proposed in [6], the fall detection using Arduino-based system is designed to monitor acceleration values using an MPU 6050 accelerometer component. By comparing the total acceleration values with a threshold value, the system can detect whether the user is standing up or lying down on the ground. For the person standing, the system constantly monitors the acceleration, while when the person is lying on the ground, the buzzer emits an acoustic signal to ensure the initialization of the GSM module and to notify the health centers and family members. If a person loses consciousness during a fall, the microcontroller provides location data from the GPS module and sends it to the appropriate services with an alarm message [6].
In [7], a fall detection system that uses accelerometers and gyroscopes is designed to detect two types of human activities: static and dynamic postures. Static postures include a person sitting, standing, or lying down, while dynamic postures involve movement between static postures. The system includes two tri-axial accelerometers that are placed on the person’s chest and thigh, respectively, in order to recognize their static postures. The system has been shown to have 91% sensitivity and 92% specificity. However, the system is not without its limitations, as it struggles to detect a person jumping on a bed or falling from a wall while in a seated position.
In addition, the method presented in [8] for fall detection is based on kinematics, and it aims to monitor the different positions of an individual during a fall. The system is classified into two categories, namely threshold-based methods (TBM) and machine learning methods (MLM). TBM is less expensive to implement compared to MLM as it utilizes a threshold to distinguish a fall from activities of daily living (ADL), while MLM requires a dataset containing fall and ADL samples. However, the proposed MLM method requires more computations and is more expensive to implement than TBM.
Likewise, two different fall detection methods are discussed in [9] and [10]. The first approach [9] utilizes a tri-axial accelerometer and gyroscope placed at the upper trunk of the human body. The system is activated when the acceleration surpasses a certain threshold and the gyroscope checks the orientation of the subject. False alarms are eliminated by a push button, and the system response is fast and effective. The second approach [10] uses two or more acoustic sensors to detect a fall event based on measured height and loudness. Two additional microphones are used to minimize noise and distance which is kept at 4 m apart. The system achieved 70% accuracy with no false alarms, which can be improved up to 100% with a penalty of 5 false alarms every hour.
With respect to computer vision-based strategies, three different fall detection systems that use different techniques to detect falls have been highlighted in [11, 12], and [13]. A novel approach in fall detection systems is the use of human shape variations for fall detection. This system relies on detecting differences in the human form, utilizing a combination of the best-fit ellipse around the body, histograms of the silhouette projection, and changes in the head's temporal position. These cues enable the detection of various behaviors [11]. On the other hand, [12] proposes an automated monitoring system with face recognition to detect falls in a specific area. It uses webcams to collect data on the person's movement, position, and distance from the camera to determine if a fall has occurred. As for [13], the system uses an omni-directional camera with a separate PC server that captures images in 360 degrees to solve the problem of blind spots. The system has a sensitivity of 78% without personal information and up to 90% with personal information but requires users to provide personal information such as height and BMI, which increases implementation costs.
Sensor fusion-based strategies have proven to be very effective in fall detection. One such approach is the combination of accelerometer, gyroscopes, and acoustic sensors to detect heartbeats [14]. Typically, the device is positioned at the center of the body, and wireless communication is established using the ZigBee protocol. In the event that the battery level is low, the system employs the ZigBee connection to notify the user to charge the battery, and five different algorithms have been developed, the result of which varies between 92 and 97%. By combining the system with accelerometers and gyroscopes, the detection rate increases to 97% [14].
Moreover, in [15], a fall detection system using mobile devices is designed to detect falls and monitor heart rate by mounting a mobile device on the user's waist, which alerts caregivers in case of an emergency. The detection of falls and heart rate in a system is achieved through the use of tri-axis accelerometers and three-channel ECG circuits, respectively. In addition to a simple threshold algorithm, the system employs several supplementary techniques to enhance the accuracy of detection [15]. The response time of the system is faster and more efficient, allowing for timely alerts to be sent to caregivers.
To sum up, falls are a serious concern among the elderly and can lead to severe injuries and even death. Wearables, assistive technologies highlighted in [16], and sensor-based fall detection systems have been developed to prevent falls and alert individuals or authorities when a fall occurs. These systems utilize different technologies such as accelerometers, ultrasonic sensors, and GPS modules to detect falls and can be easily adopted by a large number of users. While these systems have shown promising results, they still have limitations and require further improvements to provide accurate and reliable fall detection. This study intends to address some of the shortcomings by using a sensor fusion approach and enhance the overall system accuracy. The next sections will focus on the developed prototype and its performance analysis.
40.3 Design and Implementation
The proposed fall detection system was designed by assembling software and hardware components into a finished prototype, as depicted in Fig. 40.1. The following sections outline the steps taken to implement the software, hardware, system integration, and final prototype. To aid in understanding human body gestures and various fall postures, Figs. 40.2 and 40.3 are provided.

Design prototype

Human body gestures [5]

Human fall postures [5]
40.3.1 Software Component (Mobile Application or Mobile App)
The fall detection app was developed using the MIT APP INVENTOR 2 software and incorporates sensor fusion techniques (Fig. 40.4). The app integrates data from both the smartphone's in-built accelerometer and a separate ultrasonic sensor module to perform real-time fall detection analysis. Two different approaches were programmed in the app using sensor fusion techniques—one using accelerometer readings and the other using ultrasonic sensor readings. The app uses the combined outputs of both approaches to accurately detect fall situations. The developed system has shown high accuracy in detecting falls, and it can help improve the safety and well-being of at-risk individuals.

App build in MIT APP INVENTOR 2 software
One of the approach is basically using the accelerometer readings and finding the magnitude of the in-built accelerometer sensor readings. In fall detection, the norm of acceleration typically refers to the magnitude of the acceleration vector obtained from an accelerometer sensor. In addition, it represents the overall acceleration magnitude experienced by the user, regardless of its direction. The magnitude has been calculated by acquiring the built-in accelerometer readings from the smartphone, that is, the Ax, Ay, and Az, which are the accelerations in the x, y, and z plane, respectively. Since the acceleration is to be measured in a 3D space, the magnitude of the total acceleration is calculated as follows:
whereby the \(x, y\), and \(z\) are acceleration values in three different directions.
The norm of acceleration is often used as a feature to detect falls. A fall typically results in a sudden increase in the norm of acceleration, which can be detected using appropriate threshold values. Figure 40.5 illustrates the tri-axial orientation through which the accelerometer sensor takes its readings on a smartphone.

Tri-axial orientation of a smartphone
Moreover, it should be noted that the \(|A|\) for each time step was calculated, and for the purpose of measuring the fall, difference between the \(|A|\) is calculated between initial \(|{A}_{i}|\) and the preceding \(|{A}_{p}|\). Thereafter, a threshold was set to discriminate whether a person is standing or falling. The threshold setting is explained in Sect. 40.4. Figure 40.6 shows the proposed design algorithm that has been programmed and deployed.

Design algorithm for the accelerometer-based fall detection
40.3.2 Hardware Component
To create a prototype, an Arduino Mega 2560 processor, an HC-SR04 ultrasonic sensor, and an HC-05 ZS-040 Bluetooth module for Arduino were employed. Figure 40.7 shows the assembled component.

Ultrasonic sensor Arduino-based module
To prototype the proposed system using an HC-SR04 ultrasonic sensor, HC-05 ZS-040 Bluetooth module, and an Arduino Mega 2560, the user must gather necessary materials and connect the ultrasonic sensor and Bluetooth module to the Arduino Mega. The Arduino Mega must then be connected to a computer, and the code must be written to read the distance measured by the HC-SR04 ultrasonic sensor and send it to the HC-05 ZS-040 Bluetooth module. The code is uploaded to the Arduino Mega and paired with a Bluetooth-enabled device, such as a phone. A serial terminal app can then be used to connect to the Bluetooth module and display the distance measured by the HC-SR04 ultrasonic sensor.
The Arduino software program was utilized to calibrate and set up the ultrasonic sensor. When the distance detected by the sensor is 5 cm or less, the Arduino sends a high signal ‘1’ to the smartphone via the Arduino Bluetooth module. Conversely, if the distance is greater than 5 cm, a low signal ‘0’ is transmitted to the phone. Figure 40.8 illustrates the ultrasonic sensor’s fall-detecting mode which was programmed as per the algorithm given below.

Ultrasonic sensor Arduino-based fall-detecting mode
40.3.3 System Integration
The input from both the sensors provide inputs to the app via interfaces; whenever any of the sensors detects a fall scenario, it relays it to the app. The app then sends a SMS to the emergency contact and informs them that the user has fallen after double checking using both the fall detection approaches in a specified interval of time. Thereafter, it proceeds to sending SMS to the emergency contacts as per Fig. 40.10. The whole system can take in both the inputs or either of the sensor readings in case the other one fails. Figure 40.9 presents the developed system while Fig. 40.10 presents the overall algorithm for the fall detection system.

Schematic of the developed system

Overall algorithm for the proposed system
40.3.4 Mobile Application Setup
The user initiates the application and can designate an emergency contact in the event that the “SETTINGS” button becomes inaccessible. With-in the “SETTINGS” section, the user can also specify the amount of time the app should wait before sending an SMS to the designated emergency contact with details of their fall. Furthermore, by clicking on the “About” button, the user may access information about the developer of the application. The diagram shown in Fig. 40.11 presents the main screens of the fall detection system’s user interface.

User interface of the fall detection system
40.4 Implementation Results and Analysis
Activities of daily living (ADL) and fall events were simulated and evaluated alongside one another. The ultrasonic sensor and SVM values were captured and stored, while the accelerometer was utilized to record simulated ADL events like sitting, standing, walking, and resting. Simulated fall event was made, and its \(|A|\) was calculated. Figure 40.12a–e shows the accelerometer readings for the scenarios or states specified in Table 40.1 for the simulated ADLs. Based on five instances for each of the following states, the average values of \(|A|\) are given in Table 40.1 whereby the threshold setting for fall detection is set to 10.

Accelerometer readings for five states specified in Table 40.1
Displayed in the table above is the average of various states taken from five separate cases. A threshold of 10 is utilized to accommodate the user’s varying activities of daily living (ADLs). Based on the above average values of \(|A|\), , only two classes (fall or no-fall) will be evaluated.
40.4.1 Ultrasonic Sensor Performance and Overall System Evaluation
The ultrasonic sensor module reads the values and sends out a high signal ‘1’ if the distance between the module and any object is equal to less than 5 cm (fall), and low signal ‘0’ if the distance is otherwise (no-fall). The ultrasonic sensor output readings are shown in Fig. 40.13.

Ultrasonic sensor outputs
To test the developed system that uses the sensor fusion strategy mentioned earlier, 38 different scenarios were created to determine the likelihood of a fall and no-fall. Table 40.2 presents the probability of true and false positives. Using these metrics (outlined in Table 40.2), the system's accuracy, sensitivity, and specificity were calculated using the classical approach for binary classification.
Following the above values of TP, TN, FP, and FN, the accuracy, sensitivity, and specificity are 87.50%, 89.47%, and 94.74%, respectively.
Worth mentioning is that the fall detection system is not perfect and is prone to errors. It uses an ultrasonic sensor module to detect falls, but as there is only one sensor, it can only detect falls in one particular axis. This limitation is addressed by using the phone's built-in accelerometer sensor to detect falls based on the threshold value of the three-dimensional accelerometer values of the phone. However, the accelerometer-based system may also be prone to errors as it cannot distinguish between a fall and a non-fall event, such as when a user lies down abruptly to rest. The system is relatively basic and requires further development to reach perfection. Nevertheless, despite its limitations, the system is still reliable and sensitive enough to detect falls.
40.5 Conclusion
This paper has presented a real-time fall detection system that utilizes the data from two different sensors for detecting a fall. At the heart of the proposed system is the mobile application developed for Android OS that dictates the decisions for detecting a fall. The system utilizes the in-built accelerometer from the mobile phone to acquire data and calculate the magnitude of the total acceleration (\(|A|\)). On the other hand, the external module has one ultrasonic sensor, which measures the distance of the module from the ground. Both the sensors have already been calibrated and tested to deduce appropriate values of the threshold. For the accelerometer system, the threshold values for \(\left|A\right|\) were set to 10 to ensure that any values greater than 10 would be classified as “fall.” As for the ultrasonic sensor, distance between ground and the module should be above 5 cm. This means that if the calculated distance is less than 5 cm, then it denotes a “fall” scenario. Additionally, it should be noted that the program flowchart has been designed in such a way that the proposed system is functional even if one of the sensors does not work.
Future work will include integration of the GPS location within the application to locate the user easily and accommodate for calling ambulance for quicker action or if the specified emergency contact is out of reach.
References
Dang, T.T., Truong, H., Dang, T.K.: Automatic fall detection using smartphone acceleration sensor. Int. J. Adv. Comput. Sci. Appl. 123–129 (2016)
Habib, M.A., Mohktar, M., Kamaruzzaman, S.B., Kheng, L.S., Pin, T.M., Ibrahim, F.: Smartphone-based solutions for fall detection and prevention: challenges and open issues. www.mdpi.com/journal/sensors. pp. 7182–7208 (2014)
El-Bendary, N., Tan, Q., Pivot, F.C., Lam, A.: Fall detection and prevention for the elderly: a review of trends and challenges. Int. J. Smart Sens. Intell. Syst. 6(3), 1231–1234 (2013)
Dang, T.T., Truong, H., Dang, T.K.: Automatic fall detection using smartphone acceleration sensor. Int. J. Adv. Comput. Sci. Appl. 7(12), 123–129 (2016)
Nadee, C., Chamnongthai, K.: Multi-Sensor system for automatic fall detection. Proc. APSIPA Ann. Summit Conf. 2015, 930–933 (2015)
Vetsandonphong, N.: Arduino Based Fall Detection and Alert System. School Engineering in Malaysia, Malaysia (2016)
Li, Q., Hanson, M., Stankovic, J., Barth, A., Lach, J.: Accurate, fast fall detection using gyroscopes and accelerometer-derived posture information. IEEE Comp. Soc. 138–143 (2009)
Igual, R., Medrano, C., Plaza, I.: Challenges, issues and trends in fall detection systems. Bio-Med. Eng. 1–20 (2013)
Tong, L., Chen, W., Song, Q., Ge, Y.: A research on automatic human fall detection method based on wearable internal force information acquisition system. Int. Conf. Rob. Biometr. 1–5 (2019)
Popescu, M., Li, Y., Skubic, M., Rantz, M.: An acoustic fall detector system that uses sound height information to reduce the false alarm rate. In: 30th Annual International IEEE EMBS Conference, pp. 4628–4631 (2008)
Foroughi, H., Rezvanian, A., Paziraee, A.: Robust falll detection using human shape and multi-class support vector machine. In: Sixth Indian Conference on Computer Vision, Graphics and Image Processing, pp. 413–420 (2008)
Khawandi, S., Daya, B., Chauvet, P.: Implementation of a monitoring system for fall detection in elderly healthcare. Proced. Comp. Sci. 3, 216–220 (2011)
Miaou, S.G., Sung, P.H., Huang, C.Y.: A customized human fall detection system using omni-camera images and personal information. In: Proceedings of the 1st Distributed Diagnosis and Human Healthcare Conference, pp. 39–42 (2006)
Dinh, A., Teng, D., Chen, L., Shi, Y., McCrosky, C., Basran, J., Del BelloHass, V.: Implementation of a physical activity monitoring system for the elderly people with built-in vital sign and fall detection. In: Sixth International Conference on Information Technology, pp. 1226–1231 (2019)
Nguyen, T.-T., Cho, M.-C., Lee, T.-S.: Automatic fall detection using wearable biomedical signal measurement terminal. In: 31st Annual international conference of the IEEE EMBS, pp. 5203–5206 (2009)
Kumar, S.A., Vanualailai, J., Prasad, A.: Assistive technology: autonomous wheelchair in obstacle-ridden environment. PeerJ Comput. Sci. (PeerJ). 7, e725 (2021). https://doi.org/10.7717/peerj-cs.725
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2024 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Kaloumaira, M. et al. (2024). A Real-Time Fall Detection System Using Sensor Fusion. In: Jha, P.K., Tripathi, B., Natarajan, E., Sharma, H. (eds) Proceedings of Congress on Control, Robotics, and Mechatronics. CRM 2023. Smart Innovation, Systems and Technologies, vol 364. Springer, Singapore. https://doi.org/10.1007/978-981-99-5180-2_40
Download citation
DOI: https://doi.org/10.1007/978-981-99-5180-2_40
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-5520-6
Online ISBN: 978-981-99-5180-2
eBook Packages: EngineeringEngineering (R0)