
Abstract
The present chapter investigates the moment-independent sensitivity analysis for hybrid sandwich structures (having cylindrical shell geometry) subjected to low-velocity impact. These hybrid structures are extensively used in lightweight applications where thermal exposure/resistance is of prime importance. Here, the FG facesheet is placed at the upper layer of core whereas laminated composite facesheet is kept at lower layer so that the structure can sustain high-temperature exposure at reduced weight because of laminated composite facesheet at the inner layer of the core. The probabilistic study is performed for the transient impact response of the structure which in turn utilized to assess the sensitiveness of the parameters. The computational efficiency is achieved by implementing polynomial chaos expansion (PCE) metamodel in conjunction with Monte Carlo simulation (MCS). The results illustrate the parameters which significantly affect the transient impact response of the structure.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
- Sensitivity analysis
- Cylindrical shell
- Hybrid sandwich structure
- Polynomial chaos expansion
- Low-velocity impact
- Monte Carlo simulation
- Probabilistic analysis
- Transient response
1 Introduction
Sandwich structures are advance structures mainly consisting of two facesheets (i.e. upper and lower facesheet) and middle core. The facesheets are generally made up of thin laminated composites having high strength. These facesheets are responsible for providing high strength and stiffness to structures, while the middle core is constructed of low-density material responsible for low weight of the structure. Because of these exclusive properties, they have wide range of applications like in aerospace, civil construction, marine and automobile industries. Apart from high structural strength and low weight, these structures are highly recommended for optimal design, which is nowadays most desirable feature. But these structures have some shortcomings like low temperature and corrosion resistance because of which delamination occurs. So for minimizing these shortcomings, the laminated composite facesheet can be replaced by the functionally graded facesheet (FGF). Functionally graded (FG) materials are inhomogeneous advance composite materials, generally metal and ceramic mixture. The construction is in such a way that one surface will be metal rich providing high strength and stiffness while the other surface will be ceramic rich providing high temperature and corrosion resistance [20] and throughout the thickness these metals and ceramics are distributed following various laws like power law, exponent law and sigmoid law. The final properties obtained in these FGMs are totally different from the parent materials [46]. By combining the sandwich structure with the FG structure, the outcome structure known as hybrid sandwich FG structure is obtained. These are new and improved structures having exclusive properties such as high temperature resistant, corrosion resistant, low weighted and at the same time not compromising with the strength and stiffness. In real life, various kinds of uncertainty such as manufacturing, geometric, material, operational and environmental exist. During manufacturing of these hybrid structures, some kinds of unavoidable uncertainties like (uncertainty in material property) are always present. So, designing and analysing these hybrid structures is quite difficult than that of conventional materials, because the variation of materials and geometrical properties of conventional materials from the nominal value is little or well known. But for safe and economical design of these hybrid FG-sandwich structures, it is very necessary to consider these uncertainties [10, 11, 16, 64,65,66]. Probabilistic approaches for predicting uncertainty-based dynamic responses in case of complex structures like composite plates and shells have gained extreme attention from the researchers [9, 17, 51, 52]. Uncertainty in the field of dynamic stability of composites was studied [15, 26,27,28,29,30,31]. Furthermore, study on composites considering various service conditions and analysing uncertainty effect was done [12, 54]; after that, the cut-out effect was studied [14]. Various works considering sandwich structure have gained immense popularity [13, 26, 28, 35, 37, 39,40,41, 48,49,50, 53]. However, the work in the field of hybrid is yet to be covered.
2 Background
The pioneering work on FGM [58] is conducted by Japanese scientist (1984) promoting it as thermal barrier coating. A large number of research work have been carried out on FGM [22,23,24, 43, 44] subsequently. Due to vast application range of FGM, it is very important to perform the static and dynamic analysis. A plenty of research has been conducted to determine the impact analysis of FGM, sandwich and composites. For attaining more superior properties, FGM core was introduced in sandwich structures which eliminated the chance of deformation. Because of the wide range of application of these structures, it is necessary to investigate the static and dynamic behaviour of these hybrid FG-sandwich structures for attaining a reliable structure. For achieving accuracy, a proper and accurate computational method should be adopted. For performing static and dynamic analysis of these hybrid FG-sandwich structures, various computational models have been developed by various researchers. The different plate theories are employed for static response of the FG-sandwich plate exposed to sinusoidal load [68]. Furthermore, for natural frequency analysis and for buckling load analysis on a simply supported hybrid FG-sandwich plate, sinusoidal shear deformation plate theory was used [69]. Application of thermo-mechanical load on sandwich structure whose core may or may not be made up of FG materials was studied [8]. Later unified shear deformation theory was developed which was used for analysing thermo-elastic bending in case of FG-sandwich plate [70]. A free vibration analysis using Ritz method for a simply supported hybrid FG-sandwich plate having rectangular geometry was studied [42]. A static analysis using three dimensional solutions for hybrid sandwich structure having FG core was proposed [32]. The result shows that by using FG material for core, the discontinuity of the in-plane normal stress across the facesheet and core interface is minimized and also there is a reduction in the magnitude of stresses in the facesheets and deflection of the panel. Later on, use of advanced equivalent single layer and layer-wise models having expansion up to fourth order was done for static analysis of these hybrid structures [4]. According to the result, it is observed that advance computational methods are essentially required for analysing these hybrid FG-sandwich structures and it was also confirmed that these hybrid FG-sandwich structures are better than the conventional sandwich structures or conventional FGM structures. Under the influence of mechanical and thermal loads, the bending analysis on hybrid FG-sandwich plates was also studied [71, 72]. Later on, refined shear displacement models were used for carrying out the deflection and stress analysis in case of these hybrid FG-sandwich plate structures [47]. This shear displacement model showed consistent parabolic variation of shear stress in transverse direction without considering shear correction factor. The effect of thickness in functionally graded structures having various geometries like plates and shells using Carrera’s unified formulation was studied [5]. After that, variable refined theories were used for analysing the thermo-elastic bending of hybrid FG-sandwich structures, taking into account parabolic variation of shear stress throughout the thickness [1]. Thereafter, a hyperbolic shear deformation theory was introduced for analysing buckling and natural frequency considering the effect of transverse shear deformation in case of these hybrid FG-sandwich plate structures [18]. Later on, a model of order-n was developed for carrying out natural frequency analysis for these hybrid FG-sandwich plates [67]. However, a suitable refined plate theory was used for carrying out vibration analysis of these FG-based sandwich plates [21]. A plenty of work related to static, buckling and natural frequency analysis of these hybrid FG-sandwich plates were performed using shear deformation theory of higher order [55,56,57]. An improved higher-order plate theory was introduced for free vibration of hybrid plates having FG facesheets so as to increase the endurance limit in case of facing varying thermal condition [33].
In recent years, various researches related to the analysis of impact on bare functionally graded structures and similarly on bare sandwich structures have been performed. A dynamic investigation of FG-based aluminium and foam core having varying density throughout the thickness, when subjected to impact loading, was found to have high energy absorption capacity [75]. Later on, a study was conducted for analysing the energy absorption capacity of FG-based polymer foams and it was observed that FG foams show superior properties related to uniform energy absorptions but this was limited to low impact load [7]. A study related to low-velocity impact, considering sandwich beam having multilayer, was conducted analytically, experimentally and numerically. It was observed that with the decrease in number of layers of facesheet and increase in the core strength, there is an increase in load carrying and energy absorption capacity of these sandwich structures [73, 74, 76]. A comparative study of low-velocity impact behaviour of simple sandwich structure and of FG-core-based sandwich was conducted, and it was observed that FG core causes maximum contact force and maximum strain compared to simple sandwich structure [19]. Similarly, the low-velocity impact behaviour of sandwich structure with three-layer grading in core was conducted and it was observed that the grading in core increases the performance of structure [77]. In addition to it, some more studies were conducted for finding the efficient way for increasing the impact performance and for minimizing the damage caused by these impact loads [2]. From the earlier discussions, it can be concluded that a lot of works show that by adding FGM core to the sandwich structure, its performance becomes superior but some contradictory findings are also present in some of the literatures. For example, a study was conducted on FG core-based sandwich panel and it showed that these FG-based sandwiches had inferior performance as compared to those of ungraded cores [25].
It is observed that the impact behaviour of hybrid FG-sandwich structures has not been completely illustrated. Furthermore, instead of grading core, studies can also be conducted by replacing the facesheet material with FG materials. It is also observed that most of the work follows deterministic approach; very little study is conducted using uncertainty approach. These uncertainty approach should be taken into account while dealing with practical problems so as to minimizing the chances of structure failure making it reliable and safe.
3 Governing Equations
In the current chapter, the hybrid FG-sandwich cylindrical shell is subjected to low-velocity impact loads as shown in Fig. 1.

a Hybrid FG-sandwich cylindrical shell structure and b impact loading (normal and oblique) on hybrid FG-sandwich plate
In this chapter, \(\overrightarrow {V} _{a}\) is the volume fraction of an element of materials ‘a’, whereas the function indicating material properties of hybrid FG-sandwich structure ‘\(f_{{{\text{impact}}}}\)’ can be represented as
where \(f_{a}\) represents the material property of an element of materials ‘a’. The temperature-dependent material properties of hybrid FG-sandwich structure were proposed [63] and can be expressed as
where \(f_{0}\), \(f_{ - 1}\), \(f_{1}\), \(f_{2}\) and f3 are coefficients of temperature and T represents the temperature in Kelvin.
In hybrid FG-sandwich structures, it is observed that there is a material property variation [45] throughout the depth which is smooth and continuous. These variations can be given by various laws. In this chapter, the effective material property is obtained by using power law as shown below
where \(E^{{}}\) represents the elastic modulus, \(\mu^{{}}\) represents Poisson’s ratio and \(\rho^{{}}\) represents the mass density, while ‘C’ shows top surface (ceramic rich) and ‘M’ shows the bottom surface (metal rich) of FG facesheet. ‘t’ denotes the thickness and x = (t/2), while ‘n’ indicates the power law index. The dynamic equilibrium equation is represented as
where \((\psi )\) represents degree of stochasticity and \(\left\{ \delta \right\}\) represents the displacement, whereas \([M(\psi )]\) represents the mass matrix and \([K(\psi )]\) represents the stiffness matrix.
In the present case, i.e. low-velocity impact condition, the external force \(\left[{F}_{\mathrm{impact}}\right]\) can be expressed as
In the present case, as the impact is rigid then the equation can transformed as
where \({m}_{\mathrm{impact}}\) represents the mass of the impactor while \({\stackrel{..}{a}}_{\mathrm{impact}}\) represents the impact due to acceleration. In this chapter, the contact law given by Hertzian is used for determining the force exerted by impactor (here spherical geometry is considered). Thus, the contact force (\({F}_{\mathrm{contact}}\)) can be shown as [6]
where after modification, the contact stiffness is represented by \({K}_{M}\) and the maximum indentation is represented by \({\boldsymbol{\alpha }}_{\mathrm{max}.}\) [60]. \(\alpha\) is the local indentation and \(\chi\) is a constant which is dependent on the structure of target and impactor. The constant d can be shown as
where \({r}_{\mathrm{impactor}}\) and \({r}_{\mathrm{shell}}\) represent the radius of curvature of the impactor and the cylindrical shell. The local indentation (\(\alpha (t)\)) can be shown as
where \({d}_{\mathrm{impactor}}\) represents the displacement because of impactor, \(\delta\) represents the displacement where impact \(\left({x}_{c},{y}_{c}\right)\) takes place in the z-direction, while \(\theta\) represents the impact angle and \(\varphi\) represents the twist angle. Globally, the force component can be expressed as
In the present chapter, Newmark’s integration method is considered for calculating time-dependent equations [3]. The governing equation (Eq. 14) indicates that transient properties are exhibited by the structure under impact loading,
where \(F_{{{\text{impact}}}}^{t + \Delta t} = M_{\left( i \right)} \left( {c_{0} w_{i}^{t} + c_{1} \dot{w}_{i}^{t} + c_{2} \ddot{w}_{i}^{t} } \right) - F_{{{\text{contact}}}}^{t}\).
The above equation is an ordinary differential equation (ODE) with constant coefficients, with a time interval of \(\Delta t\) which is discrete in nature. At time interval \(t+\Delta t\), we get
where \([K]\) and \([\stackrel{-}{K}]\) are active stiffness matrices for impactor and cylindrical shell, respectively. It can be further expressed as Eqs. (18) and (19)
where \(\left( {\overline{\overline{{\Psi }}} } \right)\) represents the stochasticity present in the function.
The velocity of the impactor and cylindrical shell can be expressed as
The acceleration of the impactor and cylindrical shell can be expressed as
The initial boundary condition is expressed as
The constants can be formulated as follows
The value of A is taken as 0.5 and B as 0.25. For the FE modelling, an isoparametric element which is quadratic in nature is considered with eight nodes. For every node, there are three translational and two rotational degrees of freedom. The shape function \(\overline{S} _{i}\) for the same can be determined as
where \(\varsigma\) and \(\varphi\) signify the local natural coordinates of the element. Here, \({\varsigma }_{i}\)= +1 for nodes 2, 3 and 6, \({\varsigma }_{i}\)= −1 for nodes 1, 4 and 8, \({\varphi }_{i}\)= +1 for nodes 3, 4 and 7 and \({\varphi }_{i}\)= −1 for nodes 1, 2 and 5. The efficiency of the shape function is determined by Eq. (30)
The coordinates (x, y) of any particular point for the eight-noded element are
The relation between the nodal degree of freedom and displacement with respect to the coordinates (\(\varsigma ,\varphi\)) can be derived as
The relation between the shape functions in terms of the Jacobian matrix ([J]) is given as
where
In this chapter, the framework for the stochastic low-velocity impact analysis is depicted in Fig. 2. Initially, the input parameters are identified like Young’s modulus, shear modulus, Poisson’s ratio, density, etc., to incorporate in the model to be designed. After that, a finite element method (FEM)-based approach is implemented to estimate the deterministic output. The next step is to evaluate the input and output data which are used to fit in the metamodel or surrogate model. In the present study, polynomial chaos expansion (PCE) is used as a metamodel and its predictability is verified by portraying percentage error and scatter plot with respect to Monte Carlo simulation (MCS).

Flow chart for probabilistic analysis of transient low-velocity impact response
4 Polynomial Chaos Expansion (PCE)
The uncertainty of each input parameter in the random variable approach is modelled by describing a probability density function (PDF) (refer to Fig. 3, fx(a)). The aim of UQ is then to obtain the statistical moments of the random input response as presented in this section. In its least complex structure, the PCE of a stochastic response [62] \(f\left( {\mathop{a}\limits^{\rightharpoonup} \left( {\mathop{\zeta }\limits^{\rightharpoonup} } \right)} \right)\) depends on the randomness of the input variables

Flow chart for moment-independent sensitivity analysis using PCE surrogate model
where bn is the PCE coefficients, \(\varphi_{n}\) is the multidimensional orthogonal polynomials which form the orthonormal basis in Hilbert space and \(\mathop{\zeta }\limits^{\rightharpoonup} = \left\{ {\zeta_{1} ,\zeta_{2} , \ldots ,\zeta_{d} } \right\}\) shows the basic random variable vector. On the basis of PDF of random input variables, selection of multidimensional orthogonal polynomials in Eq. 35 is performed using the Askey scheme. After extending the random response, the next step is to determine the expansion coefficients, \(b_{n}\). On obtaining the PCE coefficient, random response statistical moments can easily be obtained as shown below:
The accompanying advances are engaged with getting PCE coefficients as per the following:
-
a.
Random responses and random input parameters are expressed with the help of Eq. (35) by the selection of chaos order, m. For random input variables having a moment \(\chi_{f1}\). The PCE can be shown as:
$$\sum\limits_{n = 0}^{p} {b_{n} \varphi_{n} \left( {\mathop{\zeta }\limits^{\rightharpoonup} } \right)} = f\left( {\sum\limits_{j = 0}^{t} {\chi_{f1} \varphi_{1} \left( {\zeta_{1} } \right)} , \ldots ,\sum\limits_{j = 0}^{t} {\chi_{fd} \varphi_{1} \left( {\zeta_{d} } \right)} } \right)$$(37) -
b.
On differentiating both sides of Eq. (37) w.r.t. basis random variables, \(\zeta_{1}\) by using multi-indices \(j^{(n)} = \left( {j_{1}^{(n)} ,j_{2}^{(n)} , \ldots ,j_{d}^{(n)} } \right)\) which depicts the differentiation order of the response w.r.t. basis random input variables. On summing up these multi-indices, all the potential estimation of chaos order greater than zero and less than its maximum order, n can be portrayed. On differentiating a linear system Ax = b where matrix A represents analytical sensitivities, the unknown PC coefficients are stored in x and the sensitivities of the higher order of the responses are stored in b.
-
c.
From step b, the linear system obtained can be evaluated both sides at \(\zeta_{1}\) = \(\zeta_{1}^{*}\), where \(\zeta_{1}^{*}\) represents any random value taken from the standard domain.
-
d.
Using the finite difference method, sensitivities of the higher order of the responses can be obtained.
-
e.
To obtain PCE coefficients, put the sensitivities got in step d.
5 Results and Discussion
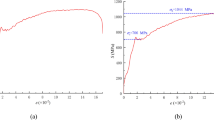
In the present chapter, hybrid functionally graded (FG)-sandwich is considered of cylindrical shell geometry having Rx = R and Ry = ∞ where, Rx and Ry are radii of curvature in x- and y-direction, respectively (refer to Fig. 1a). The present hybrid structure consists of three layers. First layer is the FG-based upper facesheet, and this FG-based facesheet constitutes metal and ceramic mixture (here, considered materials are aluminium as metal and zirconia as ceramic) [61]. Then, the second layer is the core made up of low-density foam material and the last layer is the laminated facesheet [59] (refer to Table 1). The deterministic FE code is validated with respect to the available scientific literature [34] (refer to Fig. 4). For finding the relative effect of individual material properties like Young’s modulus (E), shear modulus (G), Poisson’s ratio (µ) and mass density (ρ), moment-independent sensitivity analysis is carried out in conjunction with polynomial chaos expansion (PCE) surrogate model. The probabilistic analysis for the impact analysis is obtained using PCE approach (the model is constructed using different sample sizes) and is compared with the results obtained from direct MCS. In the present study, the various sample sizes considered for carrying PCE are 64, 128 and 256 while for direct MCS, sample size considered is 10,000. Figure 5 shows the scatter plot, while Fig. 6 shows the percentage errors for the maximum contact force, maximum plate displacement and maximum impactor displacement in case of low-velocity impact for cylindrical shell geometry obtained using PCE. From these two figures, it can be clearly observed that for sample size of 256, better results are obtained as the percentage error value is least in case of 256 sample size compared to sample size of 64 and 128. So, for carrying out further sensitivity analysis, sample size of 256 will be considered. Figure 7 shows the sensitivity plot of various random input material properties for hybrid functionally graded sandwich cylindrical shell. It is observed that mass density (\(\rho\)) is the most sensitive parameter followed by shear modulus (G23) and the remaining parameters like Young’s modulus (E1, E2), shear modulus (G12), Poisson’s ratio (\(\nu\)) and ply orientation angle (\(\theta\)) have insignificant influence on global response of the structure. Furthermore, it can be observed that these material properties are varying throughout the thickness of the shell and in most cases, the upper FG-based facesheet is the most sensitive compared to the middle core and bottom laminated facesheet.

Time versus contact force plot for functionally graded beam (made up of Si3N4 and SS) having both ends clamped [length (Lo) = 135 mm, thickness (t) = 10 mm, width (b) = 15 mm, time step (∆t1) = 1.0 μ s, impactor mass (mi) = 0.01 kg, impactor radius (ri) = 12.7 mm, impactor velocity = 1.0 m/s]

Scatter plots for the original FE model and the metamodel having non-identical sample size for a maximum contact force, b maximum plate displacement and c maximum impactor displacement

PDF plots of the percentage error of metamodel having non-identical sample size for a maximum contact force, b maximum plate displacement and c maximum impactor displacement

SI of various material properties for a maximum contact force, b maximum plate displacement and c maximum impactor displacement
6 Conclusion
In the present chapter, moment-independent sensitivity analysis is carried out for hybrid functionally graded (FG) sandwich structures having cylindrical shell geometry subjected to impact loading. For appropriate quality control, it is of prime importance to know the relative effect or importance of various input parameters on the overall dynamic response of the FGM shell and to fulfil the purpose moment-independent sensitivity analysis is carried out. Polynomial chaos expansion (PCE)-based surrogate model is used for carrying out the present sensitivity analysis. The surrogate model is applied to acquire computational proficiency without compromising the precision of the results. The present study is carried out on aiming the sensitivity analysis of material and geometrical properties of hybrid FG-sandwich shell for impact responses (mainly peak value of contact force, maximum displacement in the plate and maximum displacement due to impactor). The results illustrate the most significant parameters which affect the impact responses. The present approach is comprehensive which can be further extended for any structural design.
References
Ahmed Houari MS, Benyoucef S, Mechab I, Tounsi A, AddaBedia EA (2011) Two-variable refined plate theory for thermoelastic bending analysis of functionally graded sandwich plates. J Therm Stresses 34(4):315–334
Baba BO (2017) Curved sandwich composites with layer-wise graded cores under impact loads. Compos Struct 159:1–11
Bathe KJ (1990) Finite element procedures in engineering analysis. PHI, Google Scholar, New Delhi
Brischetto S (2009) Classical and mixed advanced models for sandwich plates embedding functionally graded cores. J Mech Mater Struct 4(1):13–33
Carrera E, Brischetto S, Cinefra M, Soave M (2011) Effects of thickness stretching in functionally graded plates and shells. Compos B Eng 42(2):123–133
Chen Y, Hou S, Fu K, Han X, Ye L (2017) Low-velocity impact response of composite sandwich structures: modelling and experiment. Compos Struct 168:322–334
Cui L, Kiernan S, Gilchrist MD (2009) Designing the energy absorption capacity of functionally graded foam materials. Mater Sci Eng, A 507(1–2):215–225
Das M, Barut A, Madenci E, Ambur DR (2006) A triangular plate element for thermoelastic analysis of sandwich panels with a functionally graded core. Int J Numer Methods Eng 68(9):940–966
Dey S, Mukhopadhyay T, Adhikari S (2017) Metamodel based high-fidelity stochastic analysis of composite laminates: a concise review with critical comparative assessment. Compos Struct 171:227–250
Dey S, Mukhopadhyay T, Khodaparast HH, Adhikari S (2015) Stochastic natural frequency of composite conical shells. Acta Mech 226(8):2537–2553
Dey S, Mukhopadhyay T, Khodaparast HH, Adhikari S (2016) A response surface modelling approach for resonance driven reliability based optimization of composite shells. Period Poly Civ Eng 60(1):103–111
Dey S, Mukhopadhyay T, Khodaparast HH, Kerfriden P, Adhikari S (2015) Rotational and ply-level uncertainty in response of composite shallow conical shells. Compos Struct 131:594–605
Dey S, Mukhopadhyay T, Naskar S, Dey TK, Chalak HD, Adhikari S (2019) Probabilistic characterisation for dynamics and stability of laminated soft core sandwich plates. J Sandwich Struct Mater 21(1):366–397
Dey S, Mukhopadhyay T, Sahu SK, Adhikari S (2016) Effect of cutout on stochastic natural frequency of composite curved panels. Compos B Eng 105:188–202
Dey S, Mukhopadhyay T, Sahu SK, Adhikari S (2018) Stochastic dynamic stability analysis of composite curved panels subjected to non-uniform partial edge loading. Eur J Mech A/Solids 67:108–122
Dey S, Mukhopadhyay T, Spickenheuer A, Adhikari S, Heinrich G (2016) Bottom up surrogate based approach for stochastic frequency response analysis of laminated composite plates. Compos Struct 140:712–727
Dey S, Mukhopadhyay T, Spickenheuer A, Gohs U, Adhikari S (2016) Uncertainty quantification in natural frequency of composite plates-an artificial neural network based approach. Adv Compos Lett 25(2):096369351602500203
El Meiche N, Tounsi A, Ziane N, Mechab I (2011) A new hyperbolic shear deformation theory for buckling and vibration of functionally graded sandwich plate. Int J Mech Sci 53(4):237–247
Etemadi E, Khatibi AA, Takaffoli M (2009) 3D finite element simulation of sandwich panels with a functionally graded core subjected to low velocity impact. Compos Struct 89(1):28–34
Gupta A, Talha M (2015) Recent development in modeling and analysis of functionally graded materials and structures. Prog Aerosp Sci 79:1–14
Hadji L, Atmane HA, Tounsi A, Mechab I, Bedia EA (2011) Free vibration of functionally graded sandwich plates using four-variable refined plate theory. Appl Math Mech 32(7):925–942
Han X, Liu GR (2002) Effects of SH waves in a functionally graded plate. Mech Res Commun 29(5):327–338
Han X, Liu GR, Lam KY, Ohyoshi T (2000) A quadratic layer element for analyzing stress waves in FGMs and its application in material characterization. J Sound Vib 236(2):307–321
Han X, Liu GR, Xi ZC, Lam KY (2001) Transient waves in a functionally graded cylinder. Int J Solids Struct 38(17):3021–3037
Jing L, Yang F, Zhao L (2017) Perforation resistance of sandwich panels with layered gradient metallic foam cores. Compos Struct 171:217–226
Karsh PK, Kumar RR, Dey S (2019) Stochastic impact responses analysis of functionally graded plates. J Brazil Soc Mech Sci Eng 41(11):501
Karsh PK, Mukhopadhyay T, Chakraborty S, Naskar S, Dey S (2019) A hybrid stochastic sensitivity analysis for low-frequency vibration and low-velocity impact of functionally graded plates. Compos B Eng 176:107221
Karsh PK, Mukhopadhyay T, Dey S (2019) Stochastic low-velocity impact on functionally graded plates: probabilistic and non-probabilistic uncertainty quantification. Compos B Eng 15(159):461–480
Karsh PK, Mukhopadhyay T, Dey S (2018) Spatial vulnerability analysis for the first ply failure strength of composite laminates including effect of delamination. Compos Struct 15(184):554–567
Karsh PK, Mukhopadhyay T, Dey S (2018) Stochastic dynamic analysis of twisted functionally graded plates. Compos B Eng 15(147):259–278
Karsh PK, Kumar RR, Dey S (2019) Radial basis function based stochastic natural frequencies anaysis of functionally graded plates. Int J Comput Methods
Kashtalyan M, Menshykova M (2009) Three-dimensional elasticity solution for sandwich panels with a functionally graded core. Compos Struct 87(1):36–43
Khalili SMR, Mohammadi Y (2012) Free vibration analysis of sandwich plates with functionally graded face sheets and temperature-dependent material properties: a new approach. Eur J Mech A/Solids 35:61–74
Kiani Y, Sadighi M, Salami SJ, Eslami MR (2013) Low velocity impact response of thick FGM beams with general boundary conditions in thermal field. Compos Struct 104:293–303
Kumar RR, Mukhopadhyay T, Naskar S, Pandey KM, Dey S (2019) Stochastic low-velocity impact analysis of sandwich plates including the effects of obliqueness and twist. Thin-Wall Struct 145:106411
Kumar RR, Mukhopadhyay T, Pandey KM, Dey S (2019) Stochastic buckling analysis of sandwich plates: the importance of higher order modes. Int J Mech Sci 152:630–643
Kumar RR, Pandey KM, Dey S (2020) Stochastic free vibration analysis of sandwich plates: a radial basis function approach, in reliability, safety and hazard assessment for risk-based technologies. Springer, Singapore, pp 449–458
Kumar RR, Vaishali, Pandey KM, Dey S (2020) Effect of skewness on random frequency responses of sandwich plates. In: Singh B., Roy A., Maiti D. (eds) Recent advances in theoretical, applied, computational and experimental mechanics. Lecture notes in mechanical engineering. Springer, Singapore. https://doi.org/10.1007/978-981-15-1189-9_2
Kumar RR, Karsh PK, Vaishali, Pandey KM, Dey S (2019) Stochastic natural frequency analysis of skewed sandwich plates. Eng Comput
Kumar RR, Mukhopadhya T, Pandey KM, Dey S, (2020a) Prediction capability of polynomial neural network for uncertain buckling behavior of sandwich plates, In: Handbook of probabilistic models. Butterworth-Heinemann, pp 131–140
Kumar RR, Pandey KM, Dey S (2020) Effect of skewness on random frequency responses of sandwich plates. In: Recent advances in theoretical, applied, computational and experimental mechanics. Springer, Singapore, pp 13–20
Li Q, Iu VP, Kou KP (2008) Three-dimensional vibration analysis of functionally graded material sandwich plates. J Sound Vib 311(1–2):498–515
Liu GR, Dai KY, Han X, Ohyoshi T (2003) Dispersion of waves and characteristic wave surfaces in functionally graded piezoelectric plates. J Sound Vib 268(1):131–147
Liu GR, Han X, Lam KY (1999) Stress waves in functionally gradient materials and its use for material characterization. Compos B Eng 30(4):383–394
Loy CT, Lam KY, Reddy JN (1999) Vibration of functionally graded cylindrical shells. Int J Mech Sci 41(3):309–324
Mahamood RM, Akinlabi ET (2015) Laser metal deposition of functionally graded Ti6Al4V/TiC. Mater Des 84:402–410
Merdaci S, Tounsi A, Houari MSA, Mechab I, Hebali H, Benyoucef S (2011) Two new refined shear displacement models for functionally graded sandwich plates. Arch Appl Mech 81(11):1507–1522
Mukhopadhyay T, Adhikari S (2016a) Equivalent in-plane elastic properties of irregular honeycombs: an analytical approach. Int J Solids Struct 91:169–184
Mukhopadhyay T, Adhikari S (2016b) Effective in-plane elastic properties of auxetic honeycombs with spatial irregularity. Mech Mater 95:204–222
Mukhopadhyay T, Adhikari S (2016c) Free-vibration analysis of sandwich panels with randomly irregular honeycomb core. J Eng Mech 142(11):06016008
Mukhopadhyay T, Chakraborty S, Dey S, Adhikari S, Chowdhury R (2017) A critical assessment of Kriging model variants for high-fidelity uncertainty quantification in dynamics of composite shells. Arch Comput Methods Eng 24(3):495–518
Mukhopadhyay T, Naskar S, Dey S, Adhikari S (2016) On quantifying the effect of noise in surrogate based stochastic free vibration analysis of laminated composite shallow shells. Compos Struct 140:798–805
Mukhopadhyay T, Adhikari S, Batou A (2017) Frequency domain homogenization for the viscoelastic properties of spatially correlated quasi-periodic lattices. Int J Mech Sci
Naskar S, Mukhopadhyay T, Sriramula S, Adhikari S (2017) Stochastic natural frequency analysis of damaged thin-walled laminated composite beams with uncertainty in micromechanical properties. Compos Struct 160:312–334
Neves AMA, Ferreira AJ, Carrera E, Cinefra M, Jorge RMN, Soares CMM (2012) Static analysis of functionally graded sandwich plates according to a hyperbolic theory considering Zig-Zag and warping effects. Adv Eng Softw 52:30–43
Neves AMA, Ferreira AJM, Carrera E, Roque CMC, Cinefra M, Jorge RMN, Soares CMM (2012) A quasi-3D sinusoidal shear deformation theory for the static and free vibration analysis of functionally graded plates. Compos B Eng 43(2):711–725
Neves AMA, Ferreira AJM, Carrera E,Cinefra M, Jorge RMN, Soares CMM (2012) Buckling analysis of sandwich plates with functionally graded skins using a new quasi3D hyperbolic sine shear deformation theory and collocation with radial basis functions. ZAMM J Appl Math Mech ZeitschriftfürAngewandteMathematik und Mechanik 92(9):749–766
Reddy JN, Wang CM, Kitipornchai S (1999) Axisymmetric bending of functionally graded circular and annular plates. Eur J Mech A/Solids 18(2):185–199
Rizov V, Shipsha A, Zenkert D (2005) Indentation study of foam core sandwich composite panels. Compos Struct 69(1):95–102
Shariyat M, Nasab FF (2014) Low-velocity impact analysis of the hierarchical viscoelastic FGM plates, using an explicit shear-bending decomposition theory and the new DQ method. Compos Struct 113:63–73
Singh H, Hazarika BC, Dey S (2017) Low velocity impact responses of functionally graded plates. Procedia Eng 173:264–270
Thapa M, Mulani SB, Walters RW (2019) Stochastic multi-scale modeling of carbon fiber reinforced composites with polynomial chaos. Compos Struct 213:82–97
Touloukian YS (ed) (1967) Thermophysical properties of high temperature solid materials, vol 1. Macmillan
Vaishali, Mukhopadhyay T, Karsh PK, Basu B, Dey S (2020) Machine learning based stochastic dynamic analysis of functionally graded shells. Compos Struct 237:111870
Vaishali, Dey S (2021) Support vector model based thermal uncertainty on stochastic natural frequency of functionally graded cylindrical shells. In: Saha S.K., Mukherjee M. (eds) Recent advances in computational mechanics and simulations. Lecture notes in civil engineering, vol 103. Springer, Singapore. https://doi.org/10.1007/978-981-15-8138-0_50
Vaishali, Mukhopadhyay T, Kumar RR, Dey S (2020) Probing the multi-physical probabilistic dynamics of a novel functional class of hybrid composite shells. Compos Struct 113294
Xiang S, Jin YX, Bi ZY, Jiang SX, Yang MS (2011) A n-order shear deformation theory for free vibration of functionally graded and composite sandwich plates. Compos Struct 93(11):2826–2832
Zenkour AM (2005a) A comprehensive analysis of functionally graded sandwich plates: Part 1—deflection and stresses. Int J Solids Struct 42(18–19):5224–5242
Zenkour AM (2005b) A comprehensive analysis of functionally graded sandwich plates: Part 2—Buckling and free vibration. Int J Solids Struct 42(18–19):5243–5258
Zenkour AM, Alghamdi NA (2008) Thermoelastic bending analysis of functionally graded sandwich plates. J Mater Sci 43(8):2574–2589
Zenkour AM, Alghamdi NA (2010a) Bending analysis of functionally graded sandwich plates under the effect of mechanical and thermal loads. Mech Adv Mater Struct 17(6):419–432
Zenkour AM, Alghamdi NA (2010b) Thermomechanical bending response of functionally graded nonsymmetric sandwich plates. J Sandwich Struct Mater 12(1):7–46
Zhang J, Qin Q, Xiang C, Wang TJ (2016) Dynamic response of slender multilayer sandwich beams with metal foam cores subjected to low-velocity impact. Compos Struct 153:614–623
Zhang J, Ye Y, Qin Q (2018) Large deflections of multilayer sandwich beams with metal foam cores under transverse loading. Acta Mech 229(9):3585–3599
Zhang X, Zhang H (2013) Optimal design of functionally graded foam material under impact loading. Int J Mech Sci 68:199–211
Zhang J, Qin Q, Chen S, Yang Y, Ye Y, Xiang C, Wang TJ (2018) Low-velocity impact of multilayer sandwich beams with metal foam cores: analytical, experimental, and numerical investigations. J Sandwich Struct Mater 1099636218759827
Zhou J, Guan ZW, Cantwell WJ (2013) The impact response of graded foam sandwich structures. Compos Struct 97:370–377
Acknowledgements
The first author would like to acknowledge the financial support received from Ministry of Human Resource and Development (MHRD), Government of India, during this research work.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this chapter

Cite this chapter
Vaishali, Kumar, R.R., Dey, S. (2021). Dynamic Sensitivity Analysis of Random Impact Behaviour of Hybrid Cylindrical Shells. In: Sahoo, S. (eds) Recent Advances in Layered Materials and Structures. Materials Horizons: From Nature to Nanomaterials. Springer, Singapore. https://doi.org/10.1007/978-981-33-4550-8_11
Download citation
DOI: https://doi.org/10.1007/978-981-33-4550-8_11
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-33-4549-2
Online ISBN: 978-981-33-4550-8
eBook Packages: Chemistry and Materials ScienceChemistry and Material Science (R0)