
Abstract
A probabilistic flutter analysis of geometrically coupled cantilever wing is carried out using first-order perturbation approach by considering bending and torsional rigidities as Gaussian random variables. The unsteadiness in the aerodynamic flow is modeled using Theodorsen’s thin airfoil theory. The probabilistic response of the wing is obtained in terms of mean, standard deviation, and coefficient of variation (COV) of real and imaginary parts of the eigenvalues at various free stream velocities. The perturbation results are also compared with Monte Carlo simulations. It is observed that the probabilistic response obtained from the perturbation approach is very accurate up to 7% COV in bending rigidity but in the case of torsional rigidity, it starts losing accuracy after 3%.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others
Keywords
1 Introduction
In the design of aircraft, one of the critical failure phenomena, which happens in the aeroelastic system due to the fact that power pumped by aerodynamic flow is not completely able to be dissipated by the dissipative mechanism of the aeroelastic system, and the structure fails catastrophically due to diverging large amplitude vibrations. The flow velocity at which there is power balance, is called flutter velocity. In general, the material properties of the structure is not unique, and it depends on various factors such as method of manufacturing, method of testing and test conditions, human errors in calculation, etc. So the material properties must be modeled as stochastic parameters in order to get more realistic results.
Pettit [1] showed the importance and challenges of uncertainty quantification in aeroelasticity and potential future application of uncertainty-based aircraft design over the conventional factor of safety-based design. Kurdi et al. [2] considered the box type of Goland wing with spars and ribs, and their thickness and area were considered as Gaussian random variables. For probabilistic response analysis, a Monte Carlo Simulation (MCS) approach was used where free vibration and flutter analyses were conducted using MSC-Nastran and ZONA 6 module of ZAERO, respectively. Khodaparast et al. [3] used Nastran-based doublet lattice method for aerodynamic modeling to carry out both probabilistic and non-probabilistic flutter analysis of aircraft wing. The wing with spar, ribs, upper and lower skins, and their thickness and area were considered as random variables. For probabilistic analysis, perturbation method and for non-probabilistic analysis, interval and fuzzy logic were used to determine the bounds on the flutter mode. Borello et al. [4] considered both isotropic and composite wing with structural uncertainties for flutter analysis, and the reliability analysis was carried out using various approaches such as First-Order Reliability Method (FORM), Second-Order Reliability Method (SORM), Response Surface Method (RSM), and compared with MCS. Cheng and Xiao [5] proposed a hybrid method based on RSM, Finite Element Method (FEM), and MCS to carry the probabilistic free vibration and flutter analysis of suspension bridge. Castravete and Ibrahim [6] investigated the effect of stiffness uncertainties on flutter of a cantilever wing using MCS and first-order perturbation technique in time domain.
From the literature, it is observed that most of the work reported on probabilistic flutter analysis has been done using commercial software. In the present work, probabilistic flutter analysis of a cantilever wing is carried out using physics-based approach in the frequency domain by considering both bending and torsional rigidity as independent Gaussian random variables. The impetus of the present work is on modeling two-dimensional Theodorson’s unsteady aerodynamics [7] in a strip theory approximation containing frequency-dependent terms. In the present first-order perturbation approach, the frequency-dependent aerodynamic terms are also modeled as random variables and their effect on the probabilistic flutter characteristics of the wing is studied.
2 Mathematical Modeling
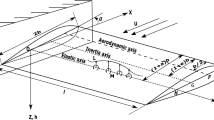
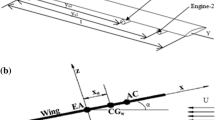
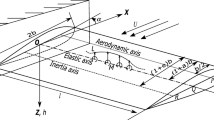
The Goland wing is a metallic wing [8] and its schematic diagram is shown in Fig. 1. In the figure, points F, G, and H are the aerodynamic center, center of mass, and location of elastic axis at the section, respectively. The dimensionless parameters a and e \((-1\le a\le 1\) and \(-1 \le e \le 1)\) determine the location of elastic axis and inertia axis, respectively, at the section.

Schematic representation of cantilever wing (Goland wing)
The kinetic energy (T) of the wing is defined as
where \(I_{p}\), m, b, and \(x_{\alpha }(=e-a)\) are the mass moment of inertia per unit length about elastic axis, mass per unit length of the wing, semi chord of the wing, and dimensionless static unbalance respectively. The \((\dot{})\) over h and \(\alpha \) denotes the time derivatives of heave h(y, t) and pitch displacement \(\alpha (y,t)\), respectively.
The potential energy (V) of the wing is expressed as
The virtual external work done \((\delta {W_{ext}})\) by the system is given as
where L and \(M=(M_{1/4} + L(0.5+a)b)\) are the lift and moment per unit length, respectively.
Using Hamilton’s principle, the governing equations of motion of aeroelastic system can be obtained as
According to thin airfoil theory [7], the lift and moment per unit span at the aerodynamic center can be represented as
where U is the free stream velocity and C(k) appeared in Eq. 6 is the complex function called Theodorsen’s function in which \(k(=b\omega /U\), \(\omega \) is the frequency of aeroelastic system) is the reduced frequency. Theodorsen’s function is represented for numerical computation as [12]:
The weak form of Eqs. 4 and 5 can be obtained after substituting the expressions of L and M from Eqs. 6 and 7. The elemental Finite Element (FE) equations can be written as
In Eqs. 9 and 10, \(\{w_{e}\}\) and \(\{\alpha _{e}\}\) are elemental bending and torsional degrees-of-freedom, respectively, and \(\{F_{i}\}\) and \(\{\tau _{i}\}\) are the internal load vectors, respectively. The terms appearing in Eq. 9 can be written as
and the terms in Eq. 10 can be written as
where \(N_{w}\) and \(N_{\alpha }\) are the bending and torsional shape functions, and \((')\) represents the derivative with respect to y. Now assembling the elemental form of Eqs. 9 and 10, we get the assembled form of FE equation as
In Eq. 13, the displacement vector \(\{q\}\) contains all bending and torsional degrees-of-freedom. \([M_s]\), \([M_a]\), \(U[C_{a}]\), \([K_{b}]\), and \([K_{t}]\) are the structural inertia, aerodynamic inertia, aerodynamic damping, bending stiffness, and torsional stiffness matrices, respectively, and \(UC(k)[C_{a\omega }]\) and \(U^2C(k)[K_{a\omega }]\) are frequency-dependent damping and stiffness matrices respectively. Let \(\{q\}\) be represented by harmonic function \(\{q\}=\{\bar{q}\}e^{\lambda {t}}\), where \(\lambda = -\zeta \omega + i \omega \) and in other form \(\lambda = \lambda _{R} + i \lambda _{I}\), and substituting it in Eq. 13 gives the following expression as
The above equation can be solved using state-space approach as an eigenvalue problem.
3 Stochastic Modeling
The stochastic modeling of the geometrically coupled cantilever wing is based on first-order perturbation approach. In this approach, the random variables are expanded using Taylor’s series as
where \(\beta _{o}\) is the mean of random variables and r denotes independent random parameters. The derivatives of the random variables are evaluated at the mean value of the random variables. In the present problem, both bending rigidity and torsional rigidity are considered as Gaussian random variables. The random bending stiffness, torsional stiffness, eigenvalue, eigenvector, and frequency-dependent Theodorsen’s function expanded via Taylor’s series truncated to first order term can be written as
Now substituting terms from Eq. 16 to Eq. 14 and separating zeroth-order and first-order terms:
Zeroth order:
First order:
Now multiplying Eq. 18 by adjoint eigenvector or left eigenvector transpose \(\{\bar{X}_{adj}\}^{T}\) [9,10,11], we get the following equation as:
The eigenvector derivative coefficient matrix in Eq. 19 becomes zero. Equation 19 can be rewritten as
Substituting complex form of eigenvalue \((\lambda =\lambda _{R} + i \lambda _{I})\) in Eq. 20 and solving for real and imaginary part of eigenvalue derivatives as
where terms \(\xi \), \(\varphi \), \(\gamma \), \(\psi \), \(\eta \) and \(\phi \) can be obtained from the expression given below:
The variance of the real part and imaginary part can be obtained as
where variance of \(\lambda _{I}\) also represents variance of frequency \((\omega )\).
4 Results and Discussion
First, the mean flutter analysis of the wing is performed using zeroth-order equation based on pk method using the mean data given in Table 1. Figure 2 shows the variation of mean damping \((\lambda _{R}^{o})\) and frequency \((\lambda _{I}^{o})\) of the wing at various free stream velocity U. From the figure, the mean flutter velocity is found to be 137.38 m/s, which matches well with those given in [12].

Variation of real and imaginary part of mean eigenvalue with free stream velocity (U)
The probabilistic flutter analysis of cantilever wing is performed by treating EI and GJ as stochastically independent Gaussian random variables with 5% COV in EI and GJ. The mean and Standard Deviation (SD) of the first two eigenvalues obtained using first-order perturbation approach and MCS are shown in Tables 2 and 3, respectively. From the tables, it is observed that the mean and SD of eigenvalues obtained using the perturbation approach matches well with MCS at various free stream velocities which validate the present first-order perturbation approach for probabilistic analysis. From the tables, it is also observed that there is an increasing trend of SD of damping (real part) for second eigenmode (flutter mode) with increasing velocity, which indicates that eigenmodes are sensitive to probabilistic variations which can have an influence on the design of aircraft with proper flutter margin. Comparing the SD of the real part for both mode 1 and mode 2, the standard deviation of mode 2 is greater than mode 1 corresponding to a particular velocity for the variation in bending rigidity and mode 1 in the case of variation in torsional rigidity. This means that uncertainty in bending rigidity affects the real part of mode 2 whereas torsional uncertainty affects the real part of mode 1.

COV of real and imaginary part of eigenvalues of various modes for different COV of bending rigidity at U = 125 m/s a \(\lambda _{R}\) of mode 1, b \(\lambda _{I}\) of mode 1, c \(\lambda _{R}\) of mode 2, and d \(\lambda _{I}\) of mode 2
Figure 3 shows the variations in the real and imaginary part of eigenvalues for different COV of EI at velocity 125 m/s and a very good agreement with MCS is observed. The COV follows a linear relationship for most of the cases except for \(\lambda _{R}\) of the first mode, which starts significantly deviating after 7% COV of EI.
Figure 4 shows the variation in the real and imaginary part of eigenvalues at a free stream velocity of 125 m/s for different COV of GJ. From the figure, it can be observed that the COV of \(\lambda _{R}\) of mode 1, mode 2, and \(\lambda _{I}\) of mode 1 are accurate up to 3% of COV of GJ, and \(\lambda _{I}\) of mode 2 is accurate for all value of COV of GJ. A linear relationship between COV of eigenvalues up to 3% COV of GJ can be also observed.
Figure 5 shows the COV of real and imaginary part of eigenvalues at various free stream velocities due to variation in EI and GJ. From the figure, it can be observed that the COV of \(\lambda _{R}\) for mode 2 has very high value near to flutter velocity due to variation in EI and GJ. It is also observed that the COV of \(\lambda _{I}\) due to bending rigidity uncertainty is low for mode 2 in comparison with torsional rigidity uncertainty. This may be due to the fact that eigenvalues are more sensitive due to variation in torsional rigidity near to flutter velocity. Since mode 2 is the flutter mode, we further investigate the probability density function (pdf) of second mode at various velocities.

COV of real and imaginary part of eigenvalues of various modes for different COV of torsional rigidity at U = 125 m/s a \(\lambda _{R}\) of mode 1, b \(\lambda _{I}\) of mode 1, c \(\lambda _{R}\) of mode 2, and d \(\lambda _{I}\) of mode 2

COV of real and imaginary part of eigenvalues at various free stream velocities due to a COV of EI = 0.05, b COV of GJ = 0.05

pdfs of real and imaginary part of eigenvalue of mode 2 for COV of EI = 0.05 a \(\lambda _{R}\) at U = 125 m/s, b \(\lambda _{I}\) at U = 125 m/s, c \(\lambda _{R}\) at U = 137 m/s, and d \(\lambda _{I}\) at U = 137 m/s

pdfs of real and imaginary part of eigenvalue of mode 2 for COV of GJ = 0.05 a \(\lambda _{R}\) at U = 125 m/s, b \(\lambda _{I}\) at U = 125 m/s, c \(\lambda _{R}\) at U = 137 m/s, and d \(\lambda _{I}\) at U = 137 m/s
Figure 6 shows the pdf of real and imaginary part of eigenvalues for COV of EI (= 0.05) at 125 m/s and 137 m/s obtained from MCS with 10,000 simulations. From the figure, it is observed that the pdf of \(\lambda _{R}\) of mode 2 at velocity 137 m/s is slightly skewed than at velocity 125 m/s. It is also observed that \(\lambda _{I}\) of mode 2 at velocity 137 m/s shows a wider band than at velocity 125 m/s.
Figure 7 shows the pdf of real and imaginary part of eigenvalues for COV of \(\textit{GJ}(=0.05)\) at 125 m/s and 137 m/s obtained from MCS with 10,000 simulations. From the figure, it is observed that the pdf of \(\lambda _{R}\) of mode 2 at velocity 137 m/s shows a wider band than at velocity 125 m/s. The pdf of \(\lambda _{R}\) at velocity 137 m/s indicates that there is a chance of occurrence of flutter due to uncertainties in the bending and torsional rigidities as seen in Figs. 6c and 7c (+ ve region under pdf of \(\lambda _{R}\)). The figures also indicate that chances of occurrence of flutter is high in the case of variation in GJ as compared to EI due to large positive area under pdf of \(\lambda _{R}\) of mode 2.
5 Conclusions
The probabilistic flutter analysis of geometrically coupled cantilever wing has been carried out using first order perturbation approach considering bending rigidity and torsional rigidity as Gaussian random variables. The probabilistic response of the wing has been obtained in terms of mean and SD of the real and imaginary part of eigenvalues for different COV of random variables at a particular velocity using the perturbation approach. The results are compared with MCS and found to be in very good agreement for variation in EI for all COV considered. In the case of the variation in GJ, the results show accuracy up to 3% COV in GJ beyond which it loses its accuracy, which limits the applicability of perturbation approach. From the results obtained, we can conclude that the COV of \(\lambda _{R}\) of the flutter mode near the flutter velocity starts increasing, and theoretically becomes infinite at the flutter velocity. The pdf of \(\lambda _{R}\) for flutter mode shows that there are chances of occurrence of flutter at lower velocities in the presence of uncertainties. Hence, consideration of uncertainties is very important in the design of the aircraft for proper flutter margin.
References
Pettit CL (2004) Uncertainty quantification in aeroelasticity: recent results and research challenges. J Aircraft 41(5):1217–1229. https://doi.org/10.2514/1.3961
Kurdi M, Lindsley N, Beran P (2007) Uncertainty quantification of the Goland\(^{+}\) wing’s flutter boundary. In: AIAA atmospheric flight mechanics and exhibit, hilton head, South Carolina, 20–23 August 2007. https://doi.org/10.2514/6.2007-6309
Khodaparast H, Mottershead J, Badcock K (2010) Propagation of structural uncertainty to linear aeroelastic stability. Comput Struct 88(3-4):223–236. https://doi.org/10.1016/j.compstruc.2009.10.005
Borello F, Cestino E, Frulla G (2010) Structural uncertainty effect on classical wing flutter characteristics. J Aerospace Eng 23(4):327–338. https://doi.org/10.1061/(ASCE)AS.1943-5525.0000049
Cheng J, Xiao RC (2005) Probabilistic free vibration and flutter analyses of suspension bridges. Eng Struct 27(10):1509–1518. https://doi.org/10.1016/j.engstruct.2005.03.016
Castravete SC, Ibrahim RA (2008) Effect of stiffness uncertainties on the flutter of a cantilever wing. AIAA J 46(4):925–935. https://doi.org/10.2514/1.31692
Theodorsen T (1935) General theory of aerodynamic instability and the mechanism of flutter. Tech. Rep, NACA, p 496
Goland M, Buffalo N (1945) The flutter of a uniform cantilever wing. J Appl Mech-T ASME 12(4):A197–A208
Nelson RB (1976) Simplified calculation of eigenvector derivatives. AIAA J 14(9):1201–1205. https://doi.org/10.2514/3.7211
Ji-ming L, Wei W (1987) First-order perturbation solution to the complex eigenvalues. Appl Math Mech 8(6):509–514. https://doi.org/10.1007/BF02017399
Adhikari S (1999) Rates of change of eigenvalues and eigenvectors in damped dynamic system. AIAA J 37(11):1452–1458. https://doi.org/10.2514/2.622
Irani S, Sazesh S (2013) A new flutter speed analysis method using stochastic approach. J Fluid Struct 40:105–114. https://doi.org/10.1016/j.jfluidstructs.2013.03.018
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Kumar, S., Onkar, A.K., Manjuprasad, M. (2021). Probabilistic Flutter Analysis of a Cantilever Wing. In: Dutta, S., Inan, E., Dwivedy, S.K. (eds) Advances in Structural Vibration. Lecture Notes in Mechanical Engineering. Springer, Singapore. https://doi.org/10.1007/978-981-15-5862-7_12
Download citation
DOI: https://doi.org/10.1007/978-981-15-5862-7_12
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-5861-0
Online ISBN: 978-981-15-5862-7
eBook Packages: EngineeringEngineering (R0)