
Abstract
The Dempster-Shafter combination rule often get wrong results when dealing with severely conflicting information. The existing typical improvement methods are mostly based on the similarity of attributes such as evidence distance, similarity and information entropy attribute as evidence weight correction evidence itself. Ultimately, the final weights of the evidences are applied to adjust the bodies of the evidences before using the Dempster’s combination rule. The fusion results of these typical methods are not ideal for some complex conflict evidence. In this paper, we propose a new improved method of conflict evidence based on weighted credibility interval. The proposed method considers the credibility degree and the uncertainty measure of the evidences which respectively based on the Sum of Absolute Difference among the propositions and the credibility interval lengths. Then the original evidence is modified with the final weight before using the Dempster’s combination rule. The numerical fusion example has verified that the proposed method is feasible and improved, in which the basic probability assignment (BPAs) to identify the correct target is 99.21%.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Dempster-Shafer evidence theory is an uncertainty reasoning method, which was firstly proposed by Dempster, and had been developed by Shafer. There are many advantages in Dempster’s evidence theory. Firstly, a complete prior probability model is not required. After that, it can effectively deal with uncertain information, which is why it is widely applied in various fields [1, 2]. When combining highly conflicting evidence data, Dempster-Shafter evidence theory [3] often get counter-intuitive results. The improved method mainly divided into two categories, the first type is to revise the Dempster’s combination rule, and the second type is to preprocess the body of evidence. The first kind of research work mainly includes Smets’s method, Dubois and Prade’s rule and Yager’s combination rule [4]. However, the new combination rules tend to destroy the good mathematical properties of the original composition rules. More importantly, they cannot handle counter-intuitive error caused by sensor failure. Many researches tend to preprocess the evidence that to solve the problem of highly contradictory evidence fusion.
The second kind of research work mainly considers the uncertainty measure and the credibility degree, which include Murphy’s average method [5], Deng [6] proposed a method based on weighted average of the masses based on the evidence distance, Zhang’s method [7], Yuan’s method [8] based on vector space and the belief entropy. Xiao [9] proposed a multi-sensor fusion method combining belief divergence and Deng’s entropy, which has a good effect. Most of these improvement methods only consider the similarity between evidences, and rarely consider the influence of evidences themselves. For complex evidence cases, there is still some room for improvement to the final fusion result.
In practical applications, when a sensor obtains information from a signal source, there is no uncertainty in the process of information generation and transmission. While in the aspect of information reception, with the reliability of the sensor, there is uncertainty in the information source obtained by different sensors.
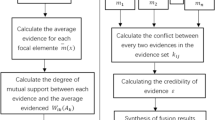
In order to solve this problem, a new uncertainty parameter that is credibility interval lengths, is first proposed to measure the influence of proposition on final weight. Based on that, a new multi-sensor data fusion method is proposed. This method not only considers the credibility of the evidence, but also considers the influence of the uncertainty measure of the evidence on the weight. The credibility interval length of evidence interval [Bel(A), Pl(A)] is used to represent the uncertainty degree of evidence itself. For each evidence, calculate the difference between the basic probability assignment and the proposition assignment under other evidence. Then the Sum of Absolute Difference indicates the support of other evidences, thus make a dent in the conflict degree between the evidences. We calculate two correction parameters based on the credibility interval lengths and the Sum of Absolute Difference among the propositions. Then the original evidence is modified with the final weight before using the Dempster’s combination rule. The flow chart of the proposed method is shown in Fig. 1. To summarize, the primary contributions of this paper are listed as follows:

The flow chart of the proposed method.
-
(1)
We propose a new uncertainty parameter, the length of the interval, to measure the impact of the proposition on the final weight. Based on this, a new multi-sensor data fusion method is proposed.
-
(2)
We validated the effectiveness of the proposed method in two real evidence cases and outperformed the existing excellent fusion methods.
The rest of this paper is organized as follows. In Sect. 2, the theoretical basis and improvement work of this paper are introduced, including a brief introduction to DS evidence theory and a new uncertainty parameter. Based on credibility interval lengths, an improved method for dealing with conflict evidence is proposed. The effectiveness of the proposed method is illustrated in Sect. 3 on two practical cases of target recognition and fault diagnosis. Finally, the conclusions and the next research work are given in Sect. 4.
2 Multi-sensor Data Fusion Based on Weighted Credibility Interval
2.1 Dempster-Shafer Evidence Theory
Dempster-Shafer evidence theory is an uncertainty reasoning method for dealing with uncertain problems. It is able to reason flexibly and has good effects even if there is no complete prior probability, or no knowledge of prior knowledge. And it is widely applied in dealing with uncertain problems. The basic model framework of Dempster-Shafer evidence theory is introduced in Fig. 1.
Definition 1 (Frame of discernment).
In Dempster-Shafer evidence theory, a complete set of mutually exclusive events is defined as a frame of discernment which is described as \( \Theta = \left\{ {\theta_{ 1} ,\theta_{2} , \ldots ,\theta_{n} } \right\} \). Where the set of all subsets in the identification framework is defined as \( 2^{\theta } \).
Definition 2 (Basic Probability Assignment Function).
For a frame of discernment \( \Theta \), the basic probability assignment function is a mapping from \( 2^{\theta } \) to [0, 1], which satisfies the following condition, \( {\text{m}}(\phi ) = 0,\sum\limits_{A \in \Theta } m (A) = 1 \). The basic probability of any proposition A in the set \( 2^{\theta } \) is assigned m(A), indicating the support of the inference model to proposition A.
Definition 3 (Belief function).
For the proposition A which \( A \subseteq \theta \) in the recognition framework, the trust function Bel: \( 2^{\theta } \to [0,1] \), and is defined as,
Where Bel(A) is called the trust degree of proposition A, which indicates the overall credibility of proposition A in all evidences. Meanwhile, the plausibility function is defined as,
Where \( \bar{A} = \theta - A \). Obviously, Pl(A) is greater than or equal to Bel(A). The credibility interval consists of the belief function and the plausible function. And the relationship among them is shown in Fig. 2.

Schematic diagram of the evidence interval.
Define interval [Bel(A), Pl(A)] for the credibility interval, the interval is neither support the proposition A, nor refuse to it. But the credibility interval lengths reflects the relevance difference of proposition A and other propositions. When the length at 0, namely the Bel(A) = Pl(A), evidence theory degenerates into the Bayes reasoning method. The average confidence interval length of each piece of evidence is used to represent the influence of the evidence on the weight.
Definition 4 (Dempster’s combination rule).
Assuming \( {\text{m}}_{1} \) and \( {\text{m}}_{2} \) is two sets of basic probability assignment under the same recognition framework \( \Theta \), and the two sets of basic probability assignment are independent of each other, the combination rule is represented by symbols \( \oplus \), and \( m = m_{1} \oplus m_{2} \), the specific definition is as follows.
Where k is the conflict coefficient, which is defined as the formula (4).
2.2 Improved Method Based on Credibility Interval
Similar to the improvement ideas [5,6,7], the proposed method does not change the Dempster-Shafter combination rule, but focuses on solving the problem that the evidence theory cannot integrate the evidence of serious conflicts effectively. So the evidences of multiple sensors can be better applied to Dempster-Shafter combination rule. The improvement of the proposed method is to propose a weight based on credibility interval to represent the influence of the evidence itself on the final weight. And the propositional Sum of Absolute Difference of evidence is used to represent the similarity between evidence. The final weight is composed of these two modified parameters is used to preprocess the original evidence and weaken the degree of conflict between the evidences. For each body of evidence, we calculate the absolute difference between each proposition and other propositions, and measure the trust degree between evidences with the difference sum. On the other hand, we calculate the propositional credibility interval lengths of evidence. The longer the interval is, the more relevance different it is with other propositions, and the greater the weight is. For the convenience of assignment calculation, the complement set between the regions is used as the direct parameter. The reliability of the evidence itself is measured by the length of the average confidence interval. The final adjustment weight is obtained by modifying the two parameters, and then it is combined with the original evidence to obtain the weighted average evidence. Finally, the final fusion result is obtained by using the Dempster-Shafter evidence combination rule.
Under the frame of discernment \( \Theta \), \( {\text{m}}_{i} (.)(1 \le {\text{i}} \le {\text{n}}) \) is the basic probability assignment of the sensor i. The method based on weighted credibility interval is calculated as follows.
-
Step 1: The evidence interval matrix can be calculated by formula (5), and the range of evidence can be calculated by formula (6). The complement of credibility interval is used as the direct calculation parameter.
$$ EIM_{\text{i}} = [Bel ( .),Pl( .)]. $$(5)$$ ROE_{\text{i}} ( .) = 1 - \left| {Pl( .) - Bel( .)} \right|. $$(6) -
Step 2: The Sum of Absolute Difference between each proposition and the others can be calculated by
$$ Suad_{i} (A) = \sum\limits_{{A \subseteq 2^{\theta } ,i \ne j}} {\left| {m_{i} (A) - m_{j} (A)} \right|} . $$(7) -
Step 3: The average value of each raw on two matrices ROE and Suad, which is denoted as two adjustment parameters.
$$ \tilde{R}{\text{O}}E_{i} = \frac{{ROE_{i} (.)}}{{2^{\theta } }},1 \le i \le n. $$(8)$$ \tilde{S}{\text{uad}}_{i} = \frac{{Suad_{i} (.)}}{{2^{\theta } }},1 \le i \le n. $$(9) -
Step 4: Support for evidence is expressed as Sup which is calculated by multiplying the two parameters obtained in step 3, then squaring, and taking the reciprocal.
$$ \text{Sup}_{i} = \frac{1}{{\left( {\tilde{R}OE_{i} *\tilde{S}uad_{i} } \right)^{2} }},1 \le i \le n. $$(10) -
Step 5: The support of evidence is normalized as the final weight adjustment.
$$ {\text{w}}_{i} = \tilde{S}{\text{up}}_{i} = \frac{{Sup_{i} }}{{\sum\limits_{s = 1}^{n} S up_{s} }},1 \le i \le n. $$(11) -
Step 6: The weighted average evidence can be calculated by
$$ {\text{m}}(\{ .\} ) = \sum {{\text{m}}_{i} } (\{ .\} )*{\text{W}}_{i} $$(12) -
Step 7: The modified evidence is combined n-1 times by Dempster’s combination rule.
$$ {\tilde{\text{m}}}(A) = \oplus_{i = 1}^{n - 1} \left( {m_{w} } \right). $$(13)
Where, \( {\text{m}}_{w} \) is the weighted average evidence calculated in step 6.
3 Examples
In order to verify the improvement of the proposed method on the conflict evidence problem, experiments are carried out through MALTAB simulation, and the experimental results are compared and analyzed with the recent studies.
3.1 Example of Target Recognition
An evidence data from reference [6] is shown in Table 1. This is a multi-sensor based target recognition problem, an object set is defined as \( \Theta = \left\{ {A, \, B, \, C} \right\} \). The evidence information is independently collected by five different types of sensors, whose evidences are processed as basic probability assignments (BBAs).
-
Step 1: The evidence interval matrix can be calculated by formula (5), and the range of evidence can be calculated by formula (6).
$$ EIM = \left( {\begin{array}{*{20}c} {[0.41,0.41]} & {[0.29,0.29]} & {[0.30,0.30]} & {[0.71,0.71]} \\ {[0.00,0.00]} & {[0.90,0.90]} & {[0.10,0.10]} & {[0.10,0.10]} \\ {[0.58,0.93]} & {[0.07,0.07]} & {[0.00,0.35]} & {[0.93,0.93]} \\ {[0.55,0.90]} & {[0.10,0.10]} & {[0.00,0.35]} & {[0.90,0.90]} \\ {[0.60,0.90]} & {[0.10,0.10]} & {[0.00,0.35]} & {[0.90,0.90]} \\ \end{array} } \right) $$$$ ROE = \left[ {\begin{array}{*{20}c} 1 & 1 & 1 & 1 \\ 1 & 1 & 1 & 1 \\ {0.65} & 1 & {0.65} & {0.07} \\ {0.65} & 1 & {0.65} & {0.10} \\ {0.7} & 1 & {0.70} & {0.10} \\ \end{array} } \right] $$ -
Step 2: The Sum of Absolute Difference between each proposition and others can be calculated by formula (7).
$$ S{\text{uad}} = \left[ {\begin{array}{*{20}c} {0.91} & {1.21} & {1.1} & 1 \\ { 2. 1 4} & {3. 0 4} & {0. 50} & 1 \\ { 0. 8} & { 1. 1 1} & {0. 4} & {0.75} \\ { 0. 7 7} & { 1. 0 2} & {0. 4} & { 0. 7 5} \\ { 0. 8 6} & { 1. 0 2} & { 0. 4} & { 0. 7 0} \\ \end{array} } \right] $$ -
Step 3: The adjustment parameters are denoted as \( \tilde{R}OE \) and \( \tilde{S}{\text{uad}} \). It is equal to the average of the two rows of the matrix.
$$ \tilde{R}OE_{1} = 1;\tilde{R}OE_{ 2} = 1;\tilde{R}OE_{ 3} = 0.5925;\tilde{R}OE_{ 4} = 0.6;\tilde{R}OE_{ 5} = 0.625. $$$$ \tilde{S}{\text{uad}}_{1} = 1.055;\tilde{S}{\text{uad}}_{ 2} = 1.67;\tilde{S}{\text{uad}}_{ 3} = 0.765;\tilde{S}{\text{uad}}_{ 4} = 0.735;\tilde{S}{\text{uad}}_{ 5} = 0.745. $$ -
Step 4: Support for evidence is expressed as Sup which is calculated by multiplying the two parameters obtained in step 3, then squaring, and taking the reciprocal.
$$ Sup_{1} { = 0} . 8 9 8 4 ;Sup_{2} = 0.3586;Sup_{3} { = 4} . 8 6 7 4 ;Sup_{4} { = 5} . 1 4 1 9 ;Sup_{5} { = 4} . 6 1 2 4; $$ -
Step 5: The support degree of evidence is normalized as the final weight adjustment.
$$ \tilde{S}up_{1} { = 0} . 8 9 8 4 ;\tilde{S}up_{2} { = 0} . 3 5 8 6 ;\tilde{S}up_{3} { = 4} . 8 6 7 4 ;\tilde{S}up_{4} { = 5} . 1 4 1 9 ;\tilde{S}up_{5} { = 4} . 6 1 2 4; $$ -
Step 6: The weighted average evidence can be calculated as follows.
$$ \begin{array}{*{20}l} {m\left( {\{ A\} } \right) = 0.5534} \hfill \\ {m\left( {\{ B\} } \right) = 0.1196} \hfill \\ {m\left( {\{ C\} } \right) = 0.0192} \hfill \\ {m\left( {\{ A,C\} } \right) = 0.3078} \hfill \\ \end{array} $$ -
Step 7: The modified evidence is combined 4 times by Dempster’s combination rule, and the results of target A is \( {\text{m}}_{f} \left( {\{ A\} } \right) = \left( {\left( {\left( {\left( {\text{m} \oplus \text{m}} \right) \oplus \text{m}} \right) \oplus \text{m}} \right) \oplus \text{m}} \right) \) ({A}) = 0.9023. The same is available, \( {\text{m}}_{f} \left( {\{ B\} } \right) = 0.1201 \), \( {\text{m}}_{f} \left( {\{ A,C\} } \right) = 0.0986 \), The Combination results of different fusion algorithms on the evidence of target recognition shown in Table 2 and Fig. 3.
Table 2. Combination results of different fusion algorithms on the evidence of target recognition Fig. 3. 
The comparison of BBAs generated by different methods in Example 1.

It can be seen that target A can be correctly identified in proposed method from Table 2 and Fig. 3. Dempster’s rule cannot deal with the conflict of evidence 2 and other evidence in this case, and reaches the wrong target C. While Murphy’s method [3], Deng et al.’s method [6], Zhang et al.’s method [7], Yuan et al. [8], Xiao [9] and the proposed method have certain effect on the processing of conflict evidence, identifying the correct target A.
As shown in Fig. 4, the proposed method present superior performance with a higher probability (99.21%) on target A compared with the best results in the comparison method. The numerical fusion example is verified that the proposed method is feasible and improved, of which weighted credibility interval can reduce the conflict of evidence.

Probability of target A being recognized
3.2 Example of Fault Diagnosis
For the problem of fault diagnosis [10, 11], an evidence data from reference [10] as shown in Table 3. This is a multi-sensor based fault diagnosis problem, a object set is defined as \( \Theta = \left\{ {F_{1} ,F_{2} ,F_{3} } \right\} \). The evidence information is independently collected by three independently distributed sensors, whose evidence data are processed as basic probability assignments (BBAs).
-
Step 1: The evidence interval matrix can be calculated by formula (5), and the range of evidence can be calculated by formula (6).
$$ EIM = \left( {\begin{array}{*{20}c} { [ 0. 6 0 , 0. 8 0 ]} & { [ 0. 1 0 , 0. 4 0 ]} & { [ 0. 2 0 , 0. 4 0 ]} & { [ 1 , 1 ]} \\ { [ 0. 0 5 , 0. 1 5 ]} & { [ 0. 8 0 , 0. 9 5 ]} & { [ 0. 8 5 , 0. 9 5 ]} & { [ 1 , 1 ]} \\ { [ 0. 7 0 , 0. 8 0 ]} & { [ 0. 1 0 , 0. 3 0 ]} & { [ 0. 2 0 , 0. 3 0 ]} & { [ 1 , 1 ]} \\ \end{array} } \right) $$$$ ROE = \left[ {\begin{array}{*{20}c} { 0. 8 0} & { 0. 7 0} & { 0. 8 0} & 1\\ { 0. 9 0} & { 0. 8 5} & { 0. 9 0} & 1\\ { 0. 9 0} & { 0. 8 0} & { 0. 9 0} & 1\\ \end{array} } \right] $$ -
Step 2: The Sum of Absolute Difference between each proposition and others can be calculated by formula (7).
$$ S{\text{uad}} = \left[ {\begin{array}{*{20}c} { 0. 6 5} & { 0. 7 0} & { 0. 0 5} & { 0. 2 0} \\ { 1. 2 0} & { 1. 4 0} & { 0. 1 0} & { 0. 1 0} \\ { 0. 7 5} & { 0. 7 0} & { 0. 0 5} & { 0. 1 0} \\ \end{array} } \right] $$ -
Step 3: Two adjustment parameters which is denoted as \( \tilde{R}OE \) and \( \tilde{S}{\text{uad}} \) can be calculated. They are equivalent to the average values of two rows.
$$ \tilde{R}OE_{1} = 0.825;\tilde{R}OE_{ 2} = 0.9125;\tilde{R}OE_{ 3} = 0.9. $$$$ \tilde{S}{\text{uad}}_{1} = 0. 4 ;\tilde{S}{\text{uad}}_{ 2} = 0.7;\tilde{S}{\text{uad}}_{ 3} = 0.4. $$ -
Step 4: Support for evidence is expressed as Sup which is calculated by multiplying the two parameters obtained in step 3, then squaring, and taking the reciprocal.
$$ Sup_{1} = 0. 4 7 4 6 ;Sup_{2} = 0. 1 2 6 7;Sup_{3} = 0. 3 9 8 8 ; $$ -
Step 5: The support calculated in step 4 is used as the dynamic support of evidence. The total support of evidences can be weighted by it and the static support which represent the importance of sensors and the reliability of sensor distribution and importance. \( \tilde{S}{\text{up}}_{i} = Sup_{i} *sw_{i} \). Where the static support parameter is known by the sensor distribution.
$$ sw_{1} = 1.0000;{\text{sw}}_{2} = 0.2040;sw_{3} = 1.0000. $$$$ \tilde{S}{\text{up}}_{1} { = 0} . 4 7 4 6 ;\tilde{S}{\text{up}}_{2} = 0.0258;\tilde{S}{\text{up}}_{3} = 0.3988; $$ -
Step 6: The support of evidence is normalized as the final weights Wi
$$ W_{1} = 0.5278;W_{2} = 0.0287;W_{3} = 0.4435. $$ -
Step 7: The weighted average evidence can be calculated by
$$ {\text{m}}(\{ \cdot \} ) = \sum {{\text{m}}_{i} } (\{ \cdot \} )^{*} Rpe_{i} . $$$$ \begin{aligned} & {\text{m}}(\{ F_{1} \} ) = 0.6285 \\ & {\text{m}}(\{ F_{2} \} ) = 0.1201 \\ & {\text{m}}(\{ F_{1} ,F_{2} \} ) = 0.0986 \\ & {\text{m}}(\{ \Theta \} ) = 0.1528 \\ \end{aligned} $$ -
Step 8: The modified evidence is combined with 2 times by Dempster’s combination rule, and the results of target A is \( {\text{m}}_{f} (\{ F_{1} \} ) = (\text{m} \oplus \text{m}) \oplus \text{m} \, (\{ F_{1} \} ) = 0.9023 \). The same is available, \( {\text{m}}_{f} (\{ F_{2} \} ) = 0.1201 \), \( {\text{m}}_{f} (\{ F_{1} ,F_{2} \} ) = 0.0986 \), \( {\text{m}}_{f} (\{ \Theta \} ) = 0.1528 \). Combination results of different fusion algorithms on the evidence of fault diagnosis are shown in Table 4 and Fig. 5.
Table 4. Combination results of different fusion algorithms on the evidence of fault diagnosis Fig. 5. 
The comparison of BBAs generated by different methods in Example 2.

As shown in Table 4, the fault type \( F_{1} \) can be correctly diagnosed with the proposed method. Fan and Zuo’s method [10], Yuan et al. [11] and Xiao [9] can correctly diagnose fault \( F_{1} \), while the wrong diagnosis results is obtained by Dempster’s method [3]. This suggests that improved methods of weakening the degree of conflict in the original evidence have a good effect in dealing with the problem of evidence of serious conflict. Compared with the comparison method, the method proposed in this paper has a highest probability of diagnostic target support (90.23%), which is because weighted credibility interval and the Sum of Absolute Difference are good measures of the reliability, and the conflict degree between the evidence can be reduced.
As shown in Fig. 6, the proposed method present superior performance with a higher probability (90.23%) on target A compared with the best results in the comparison method. The numerical fusion example is verified that the proposed method is feasible and improved, of which weighted credibility interval can reduce the conflict of evidence. This is because Sum of Absolute Difference can succinctly measure the mutual support between evidences, and credibility interval lengths can effectively measure the reliability of the evidence itself through the distribution of propositions. The proposed method considers both the effect of the two on the final weight to be effective.

Probability of fault \( F_{1} \) being diagnosed
4 Conclusion
The comprehensive consideration of the influence of evidence credibility and evidence uncertainty on weight, this paper proposes a new multi-sensor data fusion method based on the weighted credibility interval. The improvement of the method is to propose the weighted credibility interval to weaken the conflict degree between evidences. Specifically, the Sum of Absolute Difference is used to measure the support between any two evidences. On the other hand, the reliability of the evidence itself is measured by the average credibility interval lengths. The two parameters are weighted to obtain the final adjustment weight, and the weighted average evidence is calculated using the adjustment weight and the original evidence. And then Dempster-Shafter combination rule is used to get the final fusion result. Ultimately, the numerical examples illustrate that the proposed method is more effective and feasible than other related methods to handle the conflicting evidence combination problem under multi-sensor environment. Further research work mainly includes the following two aspects. One is the broader study to compare the generalization of uncertainty information in the interval parameter processing. For example, the distance of evidence [12], the joint performance of information entropy [8, 13] and similarity [14]. Second, the use of more practical and difficult verification cases is also of practical significance.
References
Gravina, R., Alinia, P., Ghasemzadeh, H., Fortino, G.: Multi-sensor fusion in body sensor networks: state-of-the-art and research challenges. Inf. Fusion 35, 68–80 (2017)
Fu, C., Xu, D.-L.: Determining attribute weights to improve solution reliability and its application to selecting leading industries. Ann. Oper. Res. 245, 401–426 (2014)
Dempster, A.P.: Upper and lower probabilities induced by a multivalued mapping. Ann. Math. Stat. 38(2), 325–339 (1967)
Yager, R.R.: On the Dempster-Shafer framework and new combination rules. Inf. Sci. 41(2), 93–137 (1987)
Murphy, C.K.: Combining belief functions when evidence conflicts. Decis. Support Syst. 29(1), 1–9 (2000)
Deng, Y., Shi, W., Zhu, Z., Liu, Q.: Combining belief functions based on distance of evidence. Decis. Support Syst. 38(3), 489–493 (2004)
Zhang, Z., Liu, T., Chen, D., Zhang, W.: Novel algorithm for identifying and fusing conflicting data in wireless sensor networks. Sensors 14(6), 9562–9581 (2014)
Yuan, K., Xiao, F., Fei, L., Kang, B., Deng, Y.: Conflict management based on belief function entropy in sensor fusion. Springerplus 5(1), 638 (2016)
Xiao, F.: Multi-sensor data fusion based on the belief divergence measure of evidences and the belief entropy. Inf. Fusion 46, 23–32 (2019)
Fan, X., Zuo, M.J.: Fault diagnosis of machines based on D-S evidence theory. Part 1: D-S evidence theory and its improvement. Pattern Recognit. Lett. 27(5), 366–376 (2006)
Yuan, K., Xiao, F., Fei, L., Kang, B., Deng, Y.: Modeling sensor reliability in fault diagnosis based on evidence theory. Sensors 16(1), 113 (2016)
Jiang, W., Zhuang, M., Qin, X., Tang, Y.: Conflicting evidence combination based on uncertainty measure and distance of evidence. SpringerPlus 5(1), 12–17 (2016)
Wang, J., Xiao, F., Deng, X., Fei, L., Deng, Y.: Weighted evidence combination based on distance of evidence and entropy function. Int. J. Distrib. Sens. Netw. 12(7), 3218784 (2016)
Fei, L., Wang, H., Chen, L., Deng, Y.: A new vector valued similarity measure for intuitionistic fuzzy sets based on OWA operators. Iran. J. Fuzzy Syst. 15(5), 31–49 (2017)
Acknowledgment
This work was supported by the Nation Natural Science Foundation of China (NSFC) under Grant No. 61462042 and No. 61966018.
Author information
Authors and Affiliations
Corresponding authors
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Ye, J., Xue, S., Jiang, A. (2019). Multi-sensor Data Fusion Based on Weighted Credibility Interval. In: Ning, H. (eds) Cyberspace Data and Intelligence, and Cyber-Living, Syndrome, and Health. CyberDI CyberLife 2019 2019. Communications in Computer and Information Science, vol 1138. Springer, Singapore. https://doi.org/10.1007/978-981-15-1925-3_6
Download citation
DOI: https://doi.org/10.1007/978-981-15-1925-3_6
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-1924-6
Online ISBN: 978-981-15-1925-3
eBook Packages: Computer ScienceComputer Science (R0)