
Abstract
In this paper, we have presented iterative Laplace transform scheme to examine fractional Navier–Stokes equations in cylindrical coordinates with initial conditions. The arbitrary ordered derivatives are described in terms of Caputo. By utilizing only the initial conditions, the analytical expressions are derived in the closed form. The results achieved with the aid of the proposed technique are graphically presented.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The fractional calculus has become a strong mechanism for finding the solutions of many problems pertaining to control engineering, physics, signal processing, mathematical biology, viscoelasticity, electromagnetism, and mathematical physics and other areas of sciences as well as technology. Several methods can be found in the literature to derive the solution of fractional order differential equation such as ADM [12], HAM [14], HPM [5], Homotopy perturbation transform method (HPTM) [9, 10, 19] and fractional Laplace Adomian decomposition method (FLADM) [7], LPM [20], LHAM [21] and so on. The above mentioned techniques provide immediate and easily seen symbolic terms of numerical approximate solutions as well as of analytical solutions to both linear and nonlinear fractional differential equations.
In 2006, Daftardar-Gejji and Jafari introduced the iterative technique for examining numerically to non-linear functional equations [4, 6, 7]. Since then the iterative approach is being used to find the solution of several non-linear differential equations of arbitrary order [1] and viewing fractional BVP [3]. Recently, Jafari et al. has made elegant use of Laplace transform in this iterative method and it became a popular method known as iterative Laplace transform method (ILTM) [8] to examine a system of partial differential equations of fractional order, Fokker–Plank equation [18] as well. In recent, time-fractional Schrödinger equations [15], fractional heat and wave-like equation [16] and fractional Telegraph equations [17] are solved successfully by the use of ILTM.
In the present study, we consider the time-fractional Navier–Stokes equation having initial condition in cylindrical coordinate and are expressed in operator form as
where \( D_{t}^{\alpha } u(r,t) \) indicates the Caputo fractional derivative of order \( \alpha \,, \) \( P = - \frac{\partial p}{\rho \partial z},\,u \) indicates the velocity, \( \rho \) is the pressure, \( v \) is the kinematics viscosity, t is the time and \( \alpha \) is a parameter representing the order of the time–fractional derivatives. In particular for \( \alpha = 1, \) the fractional Navier–Stokes Eq. (1.1) reduces to the standard Navier–Stokes equation.
The main object of this paper, we shall extend the application of Iterative Laplace transform algorithm to derive the solution of the time-fractional Navier–Stokes equations.
2 Some Basic Definitions
In this portion, we list certain basic definitions of fractional calculus along with elegant properties of Laplace transform.
Definition 1
The Caputo derivative of arbitrary order [2] of function \( u(r,t)\, \) is presented as
Here \( D^{m} \equiv \frac{{d^{m} }}{{dt^{m} }} \) and \( J_{t}^{\alpha } \) indicates the Riemann-Liouville integral operator of fractional order \( \alpha > 0 \), presented as [11]
Definition 2
The Laplace transform of \( f(t)\,,\,\,t > 0 \) is expressed as [11, 13]
Definition 3
The Laplace transform of \( D_{t}^{\alpha } u(r,t) \) is presented in following manner [11, 13]
3 Basic Idea of ILTM
To explain the basic idea of iterative Laplace transform approach [8], we take the subsequent fractional non-linear partial differential equation having the prescribed initial conditions can be expressed in the form of an operator as
where \( D_{t}^{\alpha } u(r,t) \) is the Caputo derivative of arbitrary order \( \alpha ,\,\,\;m - 1 < \alpha \le m \), presented by Eq. (2.1), R is a linear operator and may contain rest of fractional derivatives of order less than \( \alpha \), \( N \) indicates a non-linear operator which may contain other derivatives of fractional order less than \( \alpha \; \) and \( g\left( {r,t} \right) \) is a known analytic function.
Applying the Laplace transform on Eq. (3.1), we have
Making use of the differentiation property of the Laplace transform, we find
On taking inverse Laplace transform on Eq. (3.4), we have
Now, applying the iterative method,
As \( R \) is a linear operator, so we have
whereas the non-linear operator N is splitted as
Putting the results given by Eqs. from (3.6) to (3.8) in the Eq. (3.5), we obtain
We have defined the recurrence formulae as
Therefore the \( m \)-term approximate solution of Eqs. (3.1) and (3.2) in series form is given by
4 Solutions of the Time-Fractional Navier–Stokes Equations
In this part, we have made an attempt to solve the time-fractional Navier–Stokes equations by the application of iterative Laplace transform scheme.
Example 1
Consider the subsequent Navier–Stokes equation involving time–fractional derivative written by
Surrounding the initial condition
Taking the Laplace transform of the Eq. (4.1), and making use of the result given by (4.2), we get,
Applying inverse Laplace transform to the Eq. (4.4), we arrive at the subsequent result
Now, making use of the iterative method, substituting the results of the Eqs. from (3.6) to (3.8) in the Eq. (4.5) and making use of the results given by the Eqs. (3.10) to (3.12), we determine the components of the ILTM solution as follows
The other components may be obtained accordingly.
Thus, the closed form solution in the series form is can be obtained as
Special Cases
-
(i)
The result in (4.9) was derived by Momani and Odibat [12] with the aid of the different scheme that is ADM.
-
(ii)
The result in (4.9) deduced by Ragab et al. [14] by the application of HAM.
-
(iii)
A result in (4.9) has an analogy with the result of Ganji et al. [5] has been obtained by using HPM.
-
(iv)
For \( \alpha = 1\,, \) the result in (4.9) reduces to the following simple form
This result was obtained earlier by Kumar et al. [10] by using the method of HPTM.
Example 2
Next, consider the subsequent Navier–Stokes equation concerning to time–fractional derivative given by
with the initial condition
Taking the Laplace transform of the Eq. (4.11), and making use of the result given by (4.12), we have,
Applying inverse Laplace transform to the Eq. (4.14), we get
Now, making use of the iterative method, substituting the results of the Eqs. from (3.6) to (3.8) in the Eq. (4.15) and making use of the results given by the Eqs. (3.10) to (3.12), we determine the components of the ILTM solution as follows
and
and so on. The other components may be obtained accordingly.
Thus, the closed form solution in the series form is can be obtained as
Special Cases
-
(i)
The result in (4.21) was obtained by Ragab et al. [14] using the different method known as HAM.
-
(ii)
The result in (4.21) was given by Ganji et al. [5] using the different technique known as HPM technique.
-
(iii)
The result in (4.21) deduced by Momani and Odibat [12] by the application of ADM.
-
(iv)
For \( \alpha = 1\,\,, \) the result in (4.21) reduces to the following simple form
This result was obtained earlier by Kumar et al. [10] by using the method of HTPM.
5 Numerical Results and Discussions
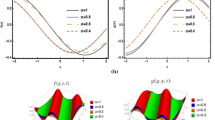
In this part, we present some numerical results for Navier–Stokes equation concerning to time–fractional derivative. Figures 1 and 2 present the ILTM solution of Navier–Stokes equation concerning to time–fractional derivative for α = 1 and 2 respectively. Figure 3 presents the ILTM solution of Navier–Stokes equation concerning to time–fractional derivative with respect to r for distinct values of α.

The surface of solution \( u(r,t), \) when \( \alpha = 1\,,P = 1 \) for Eq. (4.9)

The surface of solution \( u(r,t), \) when \( \alpha = 0.5\,,P = 1 \) for Eq. (4.9)

The nature of the solution \( u(r,t) \) w.r.t. \( r, \) when \( P = 1 \) for diverse values of \( \alpha \; \) for Eq. (4.9)
References
Bhalekar, S., Daftardar-Gejji, V.: Solving evolution equations using a new iterative method. Numer. Methods Part. Differ. Equ. 26(4), 906–916 (2010)
Caputo, M.: Elasticita e Dissipazione. Zani-Chelli, Bologna (1969)
Daftardar-Gejji, V., Bhalekar, S.: Solving fractional boundary value problems with Dirichlet boundary conditions using a new iterative method. Comp. Math. Appli. 59(5), 1801–1809 (2010)
Daftardar-Gejji, V., Jafari, H.: An iterative method for solving non-linear functional equations. J. Math. Anal. Appli. 316(2), 753–763 (2006)
Ganji, Z.Z., Ganji, D.D., Ganji, A., Rostamian, M.: Analytical solution of time-fractional Navier–Stokes equation in polar coordinate by homotopy perturbation method. Numer. Methods Part. Differ. Equ. 26(4), 117–124 (2010)
Jafari, H.: Iterative methods for solving system of fractional differential equations. Ph.D. thesis, Pune University (2006)
Jafari, H., Khalique, C.M., Nazari, M.: Application of the Laplace decomposition method for solving linear and nonlinear fractional diffusion-wave equations. Appl. Math. Lett. 24(11), 1799–1805 (2011)
Jafari, H., Nazari, M., Baleanu, D., Khalique, C. M.: A new approach for solving a system of fractional partial differential equations. Comp. Math. Appli. 66(5), 838–843 (2013)
Khan, Y., Wu, Q.: Homotopy perturbation transform method for nonlinear equations using He’s polynomials. Comp. Math. Appli. 61(8), 1963–1967 (2011)
Kumar, D., Singh, J., Kumar, S.: A fractional model of Navier–Stokes equation arising in unsteady flow of a viscous fluid. J. Assoc. Arab Univ. Basic Appl. Sci. 17, 14–19 (2015)
Miller, K.S., Ross, B.: An introduction to the fractional calculus and fractional differential equations. Wiley, New York, USA (1993)
Momani, S., Odibat, Z.: Analytical solution of a time-fractional Navier–Stokes equation by Adomian decomposition method. Appl. Math. Comput. 177, 488–494 (2006)
Podlubny, I.: Fractional differential equations, vol. 198. Academic Press, New York, USA (1999)
Ragab, A.A., Hemida, K.M., Mohamed, M.S., Abd El Salam, M.A.: Solution of time-fractional Navier–Stokes equation by using homotopy analysis method. Gen. Math. Notes 13(2), 13–21 (2012)
Sharma, S.C., Bairwa, R.K.: Closed form solution of the time-fractional Schrödinger equation via Laplace transform. Int. J. Math. Appli., 3(4-D), 53–62 (2015)
Sharma, S.C., Bairwa, R.K.: Iterative Laplace transform method for solving fractional heat and wave-like equation. Res. J. Math. Stat. Sci. 3(2), 4–9 (2015)
Sharma, S.C., Bairwa, R.K.: A reliable treatment of Iterative Laplace transform method for fractional Telegraph equations. Annal. Pure & Appl. Math. 9(1), 81–89 (2014)
Yan, L.: Numerical solutions of fractional Fokker–Planck equations using iterative Laplace transform method. Abst. Appl. Anal. Art. ID 465160 (2013)
Yavuz, M., Ozdemir, N.: Numerical inverse Laplace homotopy technique for fractional heat equations. Therm. Sci. 22(1), 185–194 (2018)
Yavuz, M., Ozdemir, N., Baskonus, H.M.: Solutions of partial differential equations using the fractional operator involving Mittag-Leffler kernel. Eur. Phys. J. Plus 133(6), 215 (2018)
Yavuz, M., Ozdemir, N.: European vanilla option pricing model of fractional order without singular kernel. Fractal Fract. 2(1), 3 (2018)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Bairwa, R.K., Singh, J. (2019). Analytical Approach to Fractional Navier–Stokes Equations by Iterative Laplace Transform Method. In: Singh, J., Kumar, D., Dutta, H., Baleanu, D., Purohit, S. (eds) Mathematical Modelling, Applied Analysis and Computation. ICMMAAC 2018. Springer Proceedings in Mathematics & Statistics, vol 272. Springer, Singapore. https://doi.org/10.1007/978-981-13-9608-3_12
Download citation
DOI: https://doi.org/10.1007/978-981-13-9608-3_12
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-13-9607-6
Online ISBN: 978-981-13-9608-3
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)