
Abstract
This paper presents a new testing technique developed for the simulation of high-speed dynamically lifted vessels. The complexity of the testing technique arises out of the need to test relatively small models in the towing tank in comparison with tests for normal displacement vessels. In order to simulate high Froude numbers much in excess of the threshold limit of 0.8 for planing, there are several challenges in designing the experiment. The challenges presented are due to small size model, necessity for giving the freedom to trim significantly and sink or emerge with reference to the static water level, lack of knowledge of the location of the point of trim, weight control of the model and delicate measurement system for the drag. Finally yet importantly, there is the caution that in the event of longitudinal plane instability there can be sometimes catastrophic damage and loss of transducers and even the model itself. The object of towing tank test for dynamically lifted crafts is to not only assess the drag and therefore power requirement, but also equally importantly verify that the hull form lifts clean at the transition-planing region, the bow wave formation and spray are not excessive, and there is no instability such as porpoising. Model tests also demonstrate the influence of loading, effect of centre of gravity location and the effect of chine lines and spray rails. Hence, model tests with dynamically lifting crafts are vital for verifying or improving the performance of the hull. This paper presents the development of a unique test set-up developed here to prepare and handle small-scale rapid-prototyped, precision models of high-speed planing hull forms. The new features incorporate an important counter-balancing mechanism, a sliding trim position control, vertical displacement guide system with delicate load cell-based data acquisition system. The newly developed system has been demonstrated in successfully simulating high speeds in the range of 25–30 knots with faithful capture of the entire kinematics, which include the trim, emergence and the wave pattern. This paper also presents some of the CFD simulation results for comparisons with the scenario recorded in the towing tank during experiments.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Hydrodynamic model tests are reliably used for assessing hull designs, especially for the high-speed planing crafts due to the complex and dynamic flow associated. High Froude number \((Fn = V/\sqrt {Lg} \succ 1.0)\) is characteristic to planing crafts and the vessel speed is large in relation to its length. Because of the nature of high dynamic lift, it is typical to associate a volumetric Froude number to non-dimensionalize the speed of the planing craft. The running trim of the vessel varies with speed due to the shift in location of centre of pressure relative to the centre of gravity. The planing craft performance is highly sensitive to the loading conditions, weight and the location of centre of gravity.
The present work describes the new experimental test set-up designed and fabricated for high-speed planing crafts in the towing tank facility at Department of Ocean Engineering, IIT Madras. The specialized set-up is used for small models (300–800 mm) at high speeds (up to 5 m/s) to measure resistance and running attitude. The development of the test set-up is described below.
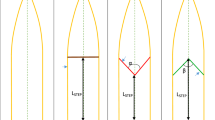
Figure 1 shows different distinctive features of the planing hull forms. Many of these features determine the dynamic characteristics and therefore they need to be evaluated through tank tests. Some planing crafts are susceptible to dynamic instabilities in calm water due to the hull form, position of centre of gravity, speed and deadrise angle. The test set-up is used to predict the inception of porpoising and a feasible solution is found by investigating various remedies. Based on the test results, for stable operation at high speeds the critical parameters such as position and length of spray rails, loading conditions are prescribed along with the estimation of required engine power. In this context, three of the hulls, (namely Valeth, SHM and Timblo hulls) with varying dimensions and design features such as tunnels, spray rails are presented in the results section.

Geometric features of hard chine planing hull form
Day and Hagg [1] provided cable towed experiments of systematic test results concerning the porpoising stability limits of planing craft. Fridsma [2] conducted experiment for a series of hulls with different deadrise angle in Davidsons laboratory. The standard free to heave and trim resistance carriage was used based on the assumption that the thrust line is parallel to the smooth water surface. Thornhill et al. [3] investigated on porpoising instability phenomena for high-speed hulls. The model was fitted to the towing carriage by a gimbal and yaw restraint. The towing force was transmitted through a linear bearing to a load cell and the through a universal joint (free to pitch and roll) to the model. Kim et al. [4] studied on design of high-speed vessels for the improvement of resistance by three different hull forms of constant displacement. A new gimbal is developed so that the model ship is towed in inclined thrust direction when the model ship is trimmed while running and an anti-yaw guide is installed around bow of a model in order to prevent the yaw motion.
The brief literature review presented here shows on case-to-case basis; different researchers have developed customized methodologies to perform controlled tests on dynamically supported vessels.
2 Experiment Set-up
Three different planing hull forms are considered here to highlight the design development and performance of controlled tests in steady high-speed conditions. The hull forms and the principle dimensions are given below. Models were fabricated to high accuracy using rapid prototyping to standards prescribed by the ITTC recommended procedures 7.5-01-01-01 (Figure 2 and Table 1).

Body plans of three planing hulls
The towing tank at IIT Madras (Member ITTC) is 82.0 long 3.2 m wide and 2.6 m deep, with selectable speed up to 5 m/s equipped with precision speed control and high-speed data acquisition system. Based on the Froude scaling, the towing tank tests are performed using scaled models as per the ITTC recommended procedures 7.5-01-01-01.
A specialized resistance test set-up is designed and fabricated for high-speed planing crafts. The model is fixed to the set-up such that it is free to take its natural trim and heave attitude while the carriage tows the model along the centreline without any drift or sway. The test set-up consists of a precision linear guide system for friction free sinkage or emergence of the model, a pivot mechanism with block bearings for pitching of the model, a load cell for resistance measurement and a counterweight, connected to the guide rod, through a pulley to balance the excess weight of the components.
The dynamic force of the towed model is measured using a beam-type load cell. In this case, the thrust line is measured parallel to the free surface. During the experiment, the real-time force plot is displayed on the computer for monitoring and remedial measures (Figs. 3 and 4).

Experimental test set-up

Exploded view of the pivot mechanism
3 Extrapolation Method
The recorded data of the measured force for each run is processed to obtain the average tow force value by selecting the data window for the constant speed duration from the time series plot corresponding to the particular speed. The dynamic wetted surface area is manually calculated from the video recorded above water showing the flow pattern and running attitude of the hull. The resistance of model measured at each speed is scaled to evaluate the prototype value based on Froude’s method of extrapolation using ITTC 78 prediction method. The form factor (1 + k) = 1 is assumed according to ITTC recommendations 7.5-02-05-01 for high-speed marine vehicles.
4 Results
The non-dimensional resistance RT/Δ value, dynamic waterline length and wetted surface area for the three different hulls are shown in Figs. 5, 6, 7 and 8.

Typical characteristic of resistance in the case of different planing hulls. Note the characteristic hump in resistance at the transition-planing speed

Reduction of waterline length in increasing dynamic condition for different planing hulls

Running trim as a function of speed

Diminishing wetted surface area as a function of speed. The area may stabilize at very high speeds
5 Numerical Simulations
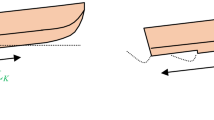
A commercial RANSE package STAR CCM+ is used for the simulation of planing vessels in calm water condition. The qualitative results in terms of wave pattern and the porpoising motions are presented here. In order to capture the flow phenomenon, the domain boundaries within which the computation grid is modelled is extended to 2L (where L is length of the ship) in front of the bow, 5L behind the transom and 2L above the deck, below the keel and to the side of the hull. These dimensions are consistent with the minimum recommendations given in ITTC 7.5-03-02-03. Due to the centre-line symmetry of the ship as well as the flow, only half the hull is included in the domain. The analysis process considers the dynamic emergence and running trim based on 6-DOF motions. Wave pattern for the three different hulls at pre-planing and planing speed is compared with the CFD results. Figure 9 shows breaking of the bow wave for pre-planing speed 8.0 knots simulated in experiment and CFD for the Valeth hull. Figure 10 shows the full planing speed 25.0 knots, the formation of rooster-tail wave pattern is seen in the figures. Figure 11 shows the wave pattern at 10.0 knots for SHM vessel. Figure 12 shows the 25.0 knots speed and the wave pattern at the aft with double rooster tails merged further downstream; this pattern is due to the twin propeller tunnels. Similarly, Figs. 13 and 14 shows the pre-planing and planing speeds for Timblo hull.

Experiment and simulation free surface wave pattern of VALETH hull at pre-planing speed

Experiment and simulation free surface wave pattern of VALETH hull at planing speed

Experiment and simulation free surface wave pattern of SHM vessel at pre-planing speed

Experiment and simulation free surface wave pattern of SHM vessel at design speed

Experiment and simulation of TIMBLO vessel at pre-planing speed

Experiment and simulation of TIMBLO vessel at planing speed
6 Simulation of Porpoising Phenomenon
Porpoising is an unstable coupled heave and pitch motions with diverging amplitudes in calm water. This dynamically unstable phenomenon is due to small perturbations of water, location of centre of gravity, deadrise angle and length of the beam. Figures 15, 16 and 17 show the porpoising motions of the TIMBLO vessel at 25.0 knots. Time series plots of sinkage and trim as obtained from CFD simulations are shown below in Fig. 16.

Snapshot showing porpoising motions of TIMBLO vessel at planing speed 25 knots

Unstable heave and pitch motions for TIMBLO at 25 knots

Snapshot of TIMBLO vessel at planing speed 25 knots
7 Conclusion
The paper reports in detail the development of an important test set-up for running tests on high-speed dynamically lifting vessels. This is a path-breaking development and exemplifies the use of a modest sized towing tank to realistically simulate measure and quantify the performance of high-speed planing hulls. Froude numbers in the range of up to four have been achieved with the test set-up. The development successfully demonstrates that with modern technology of model manufacture and sensitive electronic sensors for force measurements, miniaturization is a realizable goal. The tool combines effectively with CFD simulations to validate the dynamics and kinematics of high-speed planing hulls.
References
Day JP, Hagg RJ (1952) Planing boat porpoising. Thesis submitted to web institute of Naval Architecture, Glen Gove, N.Y
Fridsma G (1969) A systematic study of the rough-water performance of planing boats (No. 1275). Stevens Institute of Technology, Hoboken, NJ, Davidson Lab
Thornhill E, Veitch B, Bose N (2000) Dynamic instability of a high-speed planing boat model. Mar Technol SNAME News 37(3):146
Kim DJ, Kim SY, You YJ, Rhee KP, Kim SH, Kim YG (2013) Design of high-speed planing hulls for the improvement of resistance and seakeeping performance. Int. J. Naval Archit Ocean Eng 5(1):161–177
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Rakesh, N.N.V., Rao, P.L., Subramanian, V.A. (2019). High-Speed Simulation in Towing Tank for Dynamic Lifting Vessels. In: Murali, K., Sriram, V., Samad, A., Saha, N. (eds) Proceedings of the Fourth International Conference in Ocean Engineering (ICOE2018). Lecture Notes in Civil Engineering, vol 22. Springer, Singapore. https://doi.org/10.1007/978-981-13-3119-0_5
Download citation
DOI: https://doi.org/10.1007/978-981-13-3119-0_5
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-13-3118-3
Online ISBN: 978-981-13-3119-0
eBook Packages: EngineeringEngineering (R0)