
Abstract
Voltage control is an important phenomenon in the ever-escalating power system. It is presumed that the voltages at various buses are within their tolerable limits. The elements of transmission line absorb the reactive power. The loads are mostly inductive which influence the voltage profile at buses. The paper examines the voltage profile at various loading conditions and suggests the ways to improve it. The paper studies the requirement of reactive power in a power system.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
With the expansion of power system in terms of capacity addition and increasing load demand, the researchers have shifted their focus more on voltage stability issues. In the developed countries, where smart grid has been in operation, the concept of power quality is given the utmost importance. The energy charges to be paid by the consumers are the measure of voltage stability and power quality. This has posed several challenges for the utilities to keep the power quality as per the predefined standards before connecting it onto the point of common coupling. Poor voltage regulation in suburban and rural areas of consumers is the consequence of growing power demand and limited capacity addition. Most of the costly equipments either in residential apartments and industrial areas are required to be switched off in the event of poor voltage regulation and voltage flicker. Such problems have scaled up recently due to the inclusion of nonlinear loads. The phenomenon such as voltage stability and voltage collapse needs a closed monitoring and corrective actions before it escalates. The proper planning and operation of power system is thus the sole responsibility of power system analysts. This has initiated the interests of a large number of scientists and engineers to solve the voltage stability problem and improve the power quality by restructuring the generation, transmission, and distribution of electric power systems. The voltage stability problem has been identified by the dynamic behavior of the power system. On the other hand, the load changes are the reasons behind the voltage collapse. The other driving force is reactive power generation in alternators. The computational procedures [1] (Load flow) find applications during the initial planning stages of voltage stability endangered power system or during the development phases of various countermeasures. The maintenance of adequate system voltage profiles in the event of small, medium, and large disturbances has been a matter of major concern [2]. Load flow analysis and transient stability analysis are used as a tool to determine the voltage security.
2 Power System Model
A power system model is generally nonlinear and is described by algebraic and differential equations [3].
where X = (δ, ω, E ′ d , E ′ q , E fd, V R , R f , V and θ at load bus); Y = (I d , I q , V, θ); P = (P L/Q L).
A change in parameters of Eqs. (1) and (2) brings the corresponding change in X and the eigen values. Near an equilibrium point, \( \dot{X} \) becomes zero. Thus,
Linearising Eqs. (1) and (2) at \( \left( {X\left( {P_{o} } \right)\text{,} Y\left( {P_{o} } \right)} \right) \) as follows:
If det \( \left( {\frac{{\partial G_{i} }}{{\partial X_{j} }}} \right) \) is not zero, then \( \Delta \dot{X} = A\Delta X \), where \( A = \left[ {\frac{{\partial F_{i} }}{{\partial X_{j} }} - \frac{{\partial F_{i} }}{{\partial Y_{j} }}\frac{{\partial G_{i} }}{{\partial Y_{j} }}^{ - 1} \frac{{\partial G_{i} }}{{\partial X_{j} }}} \right] \)
3 Voltage Stability
A static voltage stability analysis refers to the solutions obtained in Gauss–Seidel or Newton–Raphson method of power flow. However, the dynamic voltage stability is assessed by modeling the power system incorporating all mechanisms such as swing, flux, excitation, generator load model, etc. At PV bus, P and V are specified whereas Q and δ are unspecified. Here, Q and δ are updated using GS method. It includes the following steps:
Step 1: \( Q_{i} = - {\text{Im}}\left\{ {V_{i}^{ * } \mathop \sum \limits_{k = 1}^{n} Y_{ik} V_{k} } \right\} \)
Step 2: The revised value of δ is obtained from Step 1. Thus, \( \delta_{i}^{{\left( {r + 1} \right)}} = V_{i}^{{\left( {r + 1} \right)}} \)
This gives a range of reactive generation, i.e., Q min to Q max, If Q i is not within this limit that particular i th bus is then treated as “PQ” bus. In dynamic voltage stability analysis, the machine currents prior to disturbance are calculated [4]. \( E_{i\left( 0 \right)}^{{\prime }} = E_{ti} + r_{ai} I_{ti} + jx_{di}^{'} I_{ti} , \) where \( E_{i\left( 0 \right)}^{{\prime }} = e_{i\left( 0 \right)}^{{\prime }} + jf_{i\left( 0 \right)}^{{\prime }} \) and \( \delta_{i\left( 0 \right)} = { \tan }^{ - 1} \frac{{f_{i\left( 0 \right)}^{{\prime }} }}{{e_{i\left( 0 \right)}^{{\prime }} }} \); \( e_{{i\left( {t + \Delta t} \right)}}^{{{\prime }\left( 1 \right)}} = \left| {E_{i}^{{\prime }} } \right|\cos \delta_{{i\left( {t + \Delta t} \right)}}^{ \left( 1 \right)} \) and \( f_{{i\left( {t + \Delta t} \right)}}^{{{\prime }\left( 1 \right)}} = \left| {E_{i}^{{\prime }} } \right|\sin \delta_{{i\left( {t + \Delta t} \right)}}^{ \left( 1 \right)} \).
4 Numerical Investigation
A preliminary numerical investigation was performed on π model of a radial line of length 250 km, 400 kV, three phase.
Test Data [5]
Line length = 250; Frequency in Hz = 50; r = 0.014 Ω/ph/km; L = 0.95 mH/Ph/km;C = 0.01 μF/Ph/km; Conductance g = 0 S/ph/km. Receiving end (L-L) voltage kV = 400 ∠0°; P r = 600 MW; Q r = 450 MVAR.
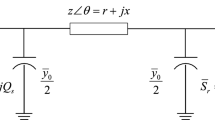
4.1 Equivalent π Model
Z′ = 3.43193 + j 73.8878 ohms; Y′ = 1.82042e−007 + j 0.000789256 mho; Zc = 308.305 + j−7.22715 Ω; alpha l = 0.00567619 neper; beta l = 0.242143 rad = 13.8737°; A = 0.97084 + j 0.0013611; B = 3.4319 + j 73.888; C = −3.5773e−007 + j 0.00077775; D = 0.97084 + j 0.0013611.
4.2 Line Performance for a Given Load
Vr = 400 kV ∠0° (Line); Pr = 600 MW; Qr = 450 Mvar; Ir = 1082.53 A ∠−36.8699°; cos ϕ r = 0.8 lag; Vs = 488.585 kV (Line) ∠12.7122°; Is = 954.232 A ∠−28.1227°; cos ϕs = 0.756597 lag; Ps = 610.969 MW; Qs = 528.024 Mvar; PL = 10.969 MW; QL = 78.024 Mvar; %VR = 25.8146%; η = 98.2047%.
4.3 Line Performance for a Given Source
Vs = 420 kV ∠0° (Line); Ps = 450 MW; Qs = 300 Mvar; Is = 743.452 A ∠0° −33.6901°; cos ϕs = 0.83205 lag; Vr = 359.457 kV ∠−12.229° (Line); Ir = 841.028 A ∠−44.3699°; cos ϕ r = 0.846746 lag; Pr = 443.375 MW; Qr = 278.565 Mvar; PL = 6.625 MW; QL = 21.435 Mvar; %VR = 20.3521%; η = 98.5278%.
4.4 Line Performance for Specified Load Impedance of 250 + j * 0 Ohms Per Phase
Vr = 400 kV ∠0°(Line); Ir = 923.76 A ∠0°; cos ϕ r = 1; Pr = 640 MW; Qr = 0 Mvar; Vs = 411.346 kV ∠16.781°(Line); Is = 914.802 A ∠11.4034°; cos ϕs = 0.995598 lag; Ps = 648.902 MW; Qs = 61.089 Mvar; PL = 8.902 MW QL = 61.089 Mvar; %VR = 5.92495%; η = 98.6282%.
4.5 Line Performance at no Load and Determination of Shunt Compensation
Vs = 400 kV ∠0°(Line); Vr = 412.013 kV ∠−0.00140194°(Line); Is = 185.008 A ∠89.946°; cos ϕs = 0.00094199 lead; V R = 400 kV; Shunt reactance = 2534.03 Ω; rating = 63.1405 Mvar.
4.6 Line SC at Load
Vs = 400 kV ∠0°(Line); Ir = 3122.18 A ∠−87.3406°; Is = 3031.15 A ∠−87.2603°.
4.7 For Shunt Capacitive Compensation
V S = 400 kV; V R = 400 ∠0° kV; P r = 600 MW; Q R = 450 MVAR.
Vs = 400 kV ∠16.2325° (Line); Vr = 400 kV ∠0° (Line); P load = 600 MW; Q load = 450 Mvar; Load current = 1082.53 A ∠−36.8699°; cos ϕ1 = 0.8 lag; Required shunt capacitor: 319.327 Ω, 8.30679 μF, 501.054 Mvar; Shunt capacitor current = 723.209 A ∠90°; Pr = 600.000 MW; Qr = −51.054 Mvar; Ir = 869.155 A ∠4.86354°; ϕ r = 0.996399 lead; Is = 877.648 A ∠16.709°; cos ϕs = 0.999965 lead; Ps = 608.031 MW; Qs = −5.057 Mvar; PL = 8.031 MW; QL = 45.997 Mvar; %VR = 3.00326%; η = 98.6792%.
4.8 Series Compensator
Vr = 400 kV ∠0° (Line); Pr = 600 MW; Qr = 450 Mvar; %comp = 50%; Required series capacitor: 36.9439 Ω, 71.8003 μF, 39.2281 Mvar; Subsynchronous resonant frequency = 35.3553 Hz; Ir = 1082.53 A ∠−36.8699°; PFr = 0.8 lag; Vs = 443.946 kV ∠6.73932° (Line); Is = 969.205 A at −28.1955° cos ϕ = 0.819804 lag; Ps = 610.965 MW; Qs = 426.767 Mvar; PL = 10.965 MW; QL = −23.233 Mvar; %VR = 12.6283%; η = 98.2053%.
4.9 Compensation Requirements
V S = 400 kV; V R = 400 ∠0° kV; Pload = 600 MW; Qload = 450 Mvar; Load current = 1082.53 A ∠−36.8699°; cos ϕ = 0.8 lag; Shunt capacitor: 329.45 Ω, 8.05154 μF, 485.658 Mvar; Capacitor current = 700.986 A ∠90°; Series capacitor: 36.9439 Ω, 71.8003 μF, 28.4606 Mvar; Subsynchronous resonant frequency = 35.3553 Hz; Pr = 600 MW; Qr = −35.6575 Mvar; Ir = 867.553 A ∠3.40104°; cos ϕ r = 0.998239 lead; Is = 884.446 A ∠152633°; cos ϕ s = 0.992165 lead; Ps = 607.961 MW; Qs = −76.557 Mvar; PL = 7.961 MW; QL = −40.899 Mvar; %VR = 1.47935%; η = 98.6906% (Figs. 1, 2, 3 and 4).

Voltage profile of an unloaded line

Receiving end power circle diagram

Voltage profile

Loadability curve
5 Discussion and Conclusion
For a given receiving end quantities at lagging power factor loads, P S and Q S are always higher than that of the receiving ends. This implies that the additional required reactive power is supplied by the generators. There are active power losses in the transmission section which can be minimized with the proper sizing of conductors. The angular difference between V S and V R depends upon the transmission line reactance and the load power factor. If the voltage profile worsens due to some of the reasons, the determination of shunt compensation helps to restore and maintain the voltage within its tolerable limits. For an unloaded line, the receiving end voltage is found more as compared with the sending end voltage due to line charging capacitance. Or in other words, it can be said that on no load, the capacitive reactance dominates the inductive reactance. If the line is short circuited at the receiving end, the current reaches abruptly a very high value and lags behind the voltage approximately by 90°. A series capacitor compensation may be employed to bring down the transfer reactance between the buses. This helps in enhancing the static transmission capacity. The recommended percentage of series compensation is limited to 25–30% as it would be uneconomical to go beyond 30% due to economical constraints. The compensation may be provided with various configurations (series and parallel) of capacitors and inductors for the purpose of voltage control and maintain the power quality. There has been a tremendous advancement in this field with the Flexible AC Transmission System (FACTS) controllers. The voltage stability and power quality problems have been greatly resolved with FACTS controllers.
6 Future Work
Based on the preliminary numerical investigations as presented in Sect. 4 of this paper, the work can be extended to fabricate a scale model of IEEE 9 bus system in institute laboratory. The transmission model of π configurations would be developed for a balanced three-phase system [6]. With loads connected at bus 5, 6, and 8 and generations at 1, 2, and 3, the experimental and numerical results obtained with Gauss–Seidel Method [7, 8, 9] will be compared for small variations in loads at various buses. The voltages at various buses are required to be within the tolerable limits [10, 11, 12]. If it violates, the appropriate compensations with RC loads would be applied to compensate for voltages (Figs. 5 and 6).

R-L load

R-C load
References
Nagsarkar TK, Sukhija MS (2007) Power system analysis. First Edition, Oxford University Press, New Delhi
Van Cutsem T, Hacquemart Y, Marquet JN, Pruvot P (Aug 1995) A comprehensive analysis of mid term voltage stability. IEEE Trans Power Syst 10(3)
Lee B, Ajjarapu V (Nov 1995) A piecewise global small disturbance voltage stability analysis of structure preserving power system models. IEEE Trans Power Syst 10(4)
Nimje AA, Panigrahi CK (Dec 27–29, 2009) Transient stability analysis using modified Euler’s iterative technique. Third international conference on power systems (ICPS), Kharagpur, India
Saadat H (2006) Power system analysis. Tata McGraw-Hill Publishing Company Limited, New Delhi, Eighth Edition
Terzioglu R, Cavus TF (Sept 2013) Probablistic load flow analysis of the 9 bus WSCC system. Int J Sci Res Publ 3(9):ISSN 2250–3153
Mienski R, Pawelek R, Wasiak I (March 2004) Shunt compensation for power quality improvement using a STATCOM controller: modelling and simulation. IEE Proc Gener Transm Distrib 151(2):274–280
Tamrakar I, Shilpakar LB, Fernandes BG, Nilsen R (2007) Voltage and frequency control of parallel operated synchronous generator and induction generator with STATCOM in micro hydro scheme. IET Gener Transm Distrib 1(5):743–750
Padiyar KR (2007) FACTS controller in power transmission and distribution. First Edition, New Age International Publishers, New Delhi
Hingorani NG, Gyugyi L (2001) Understanding FACTS. IEEE power engineering society, Sponsor, IEEE Press, Standard Publishers Distributors, Delhi
Overbye TJ (May 1993) Use of energy methods for online assessment of power system voltage security. IEEE Trans Power Syst 8(2)
Kirby B, Hirst E (Dec 1997) Ancillary service details: voltage control, an approach to corrective control of voltage instability using simulation and sensitivity. Oak, Ridge National Laboratory (Energy Division) sponsored by National Regulatory Research Institute Columbus, Ohio
Acknowledgements
The authors are grateful to the management of the Guru Nanak Institute of Engineering & Technology, Nagpur for providing necessary support and infrastructure to work.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Nimje, A.A., Sawarkar, P.R., Kumbhare, P.P. (2018). Voltage Stability Analysis for Planning and Operation of Power System. In: Mishra, A., Basu, A., Tyagi, V. (eds) Silicon Photonics & High Performance Computing. Advances in Intelligent Systems and Computing, vol 718. Springer, Singapore. https://doi.org/10.1007/978-981-10-7656-5_3
Download citation
DOI: https://doi.org/10.1007/978-981-10-7656-5_3
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-7655-8
Online ISBN: 978-981-10-7656-5
eBook Packages: EngineeringEngineering (R0)