
Abstract
In this paper, stabilization in accelerated time with continuous state feedback control is considered for mechanical systems. A general approach to construct Lyapunov functions that can be used to show rapidly exponential stability of the feedback controlled systems is developed. Furthermore, the continuous feedback control does not lead to chattering phenomena in the presence of measurement noise. The rapidly exponentially stabilization scheme given here generalizes this prior research to multiple degree-of-freedom mechanical comparison is carried out through numerical simulations on two classical nonlinear systems that are representative of a broad class of mechanical systems.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Rapidly exponential stability of nonlinear systems has the advantage of providing a guarantee on the accelerated time it takes for the nonlinear system to converge to a equilibrium. Actually, under some suitable conditions, the existence of a Lyapunov function with properties is equivalent to stability in the sense of Lyapunov, asymptotic stability, or exponential stability of state equilibrium point [1, 2]. Furthermore, once a Lyapunov function was constructed, a domain of attraction could be estimated. However, the estimate region is very conservative. Recently, Lyapunov methods have been studied a further surge of interest in the nonlinear systems field through powerful tools for obtaining them as sum of squares and here, we will mention the following works, for instance, [3,4,5,6]. In [7,8,9], Sontag and Artestein proposed control Lyapunov function for nonlinear control systems respectively. Without loss of generality, if there exists a control law such that the derivative of Lyapunov function is negative definite, then the state of nonlinear control systems converge to zero. However, when we use the control Lyapunov approach to analyze the stability of nonlinear systems, the controller must be constructed before. In order to satisfy the property of negative definite for control Lyapunov function, the inequalities should holds. Nevertheless, this will lead to a small attractive region. In order to enlarge the domain of attraction, this motivates our present study.
This work deals with design of rapidly exponential stabilizing control techniques for nonlinear mechanical systems with control input. In this paper, a new Lyapunov uniform framework for rapidly exponential stabilization of fully actuated mechanical systems is developed. The Lyapunov function is constructed as a quadratic function with an accelerated parameter. The motivation of this function is that when the value of Lyapunov function is zero vector, the generalized states converge to the desired states in accelerated time. According to the continuous feedback control law for generalized forces, the vectors converge to the zero vectors in accelerated time. Therefore, the states of nonlinear mechanical systems converge to the equilibrium in accelerated time duration.
This paper is organized as follows: Sect. 2 gives the main result on rapidly exponentially stabilization of nonlinear mechanical systems using a continuous Lyapunov function. Section 3 states two numerical simulation results for inverted pendulum on a cart and two link planar manipulator. The results illustrate the stability of this rapidly exponentially continuous feedback stabilization technique in comparison to finite time and asymptotically stabilizing continuous feedback techniques. Finally, Sect. 4 develops a summary of the main conclusions of this paper and future works.
2 Rapidly Exponentially Stabilization of Nonlinear Mechanical Systems
In this paper, we will consider the nonlinear mechanical systems as follows:
where \(M\left( q \right)\) is a positive definite inertia matrix, and \(C\left( {q,\dot{q}} \right)\) is the time derivative of the inertia matrix, and \(G\left( q \right)\) is a gravity matrix, and \(F\left( {q,\dot{q}} \right)\) is the non-conservative forces.
In this section, a new constructive approach to obtain rapidly exponentially stabilization techniques is developed for nonlinear mechanical systems. There are two steps for this method. First, a novel continuous function of the states is constructed that ensure that when the continuous function converges to zero, the state of nonlinear mechanical systems converges to zero as well. Second, a new continuous Lyapunov function is constructed to guarantee the rapidly exponentially stability of the nonlinear mechanical systems. The two subsections are described as following in details.
2.1 Rapidly Exponentially Stabilization of Nonlinear Mechanical Systems
In the first step of the rapidly exponentially stabilization process, a novel function is developed that ensures the generalized coordinate vectors of nonlinear mechanical systems converge to zero. Furthermore, assume that the desired equilibrium to be stabilized is the origin, namely, the generalized coordinate vector. Now, we will construct a function with some properties as follows.
Proposition 1
Let \(l(q,v):Q \times R^{n} { \to }R^{n}\) be a function that has the following properties:
\(l\left( {q,v} \right)\) is linear in \(v = \dot{q},l\left( {q,v} \right)\) is continuous in q,
\(l\left( {q,v} \right) = \left( {0,0} \right) \Rightarrow q\left( t \right) = 0,\) for \(t \to \infty\).
These properties guarantee that the state of nonlinear mechanical systems \((q,v) \in Q \times R^{n}\) converge to zero in accelerated time when \(l\left( {q,v} \right) = \left( {0,0} \right)\).
According to the nonlinear mechanical systems, we can construct a novel function as follows
Due to the Eq. (1), we have an important Lemma 1 as follows.
Lemma 1
If \(l\left( {q,v} \right)\) is defined by (1) where \(v = \dot{q}\) , then \(l\left( {q,v} \right)\) satisfies the properties in Proposition 1.
Proof
In order to prove the Lemma 1, we will consider the following candidate Lyapunov function \(V\left( q \right) = \frac{1}{2}q^{T} q\).
In order to evaluate on the submanifold \(l\left( {q,v} \right) = \left( {0,0} \right)\), where \(l\left( {q,v} \right)\) is given by Eq. (1), we will adopt the time derivative of candidate Lyapunov function. Therefore, we have
where constant \(C \in \left( {0,\infty } \right)\). From the inequality (2), we can see that \(\dot{V}\left( q \right) = \frac{1}{2}q^{T} q = \frac{1}{2}\left\| q \right\|^{2}\).
The second step of the constructive approach is shown in the following Sect. 2.2. According to a new Lyapunov function, we obtain a rapidly exponentially stabilization technique for nonlinear mechanical systems.
2.2 Rapidly Exponentially Stabilization of Nonlinear Mechanical Systems with Input Forces
In the second step of this rapidly exponentially stabilization approach is considered for nonlinear mechanical systems with input forces. Without loss of generality, a novel vector of generalized input forces is obtained for nonlinear mechanical systems. Furthermore, we will construct a new Lyapunov function with positive definite property. Moreover, the Lyapunov function satisfies the properties listed in Proposition 1. Now, the Lyapunov function is constructed as follows
According to the above candidate Lyapunov function, we can use it to obtain the rapidly exponentially stabilization technique.
Theorem 1
Consider the nonlinear mechanical systems with the following continuous feedback control law given by
where \(\gamma > 0,\kappa > 0,\varepsilon \in \left( {0,1} \right)\) , Moreover, \(l\left( {q,v} \right)\) is defined by Eq. (1), then the nonlinear mechanical systems is rapidly exponential stable.
Proof
In order to prove the Theorem 1, we will consider the following candidate Lyapunov function \(\upsilon \left( {q,v} \right) = \frac{1}{2}l\left( {q,v} \right)^{T} l\left( {q,v} \right)\). Due to evaluate on the submanifold \(l\left( {q,v} \right) = \left( {0,0} \right)\), we will take the time derivative of candidate Lyapunov function (3). Thereby, we obtain
Hence, \(\dot{\upsilon }\left( {q,v} \right) = - \gamma V \le - CV,C \in \left( {0,\infty } \right)\).
3 Numerical Simulation Results
In this section, we will report some numerical results obtained from the inverted pendulum on a cart and two link planar manipulator model [10]. The results show that the continuous feedback controller of this paper is feasible and effective.
3.1 Inverted Pendulum on a Cart
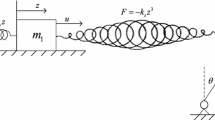
In this subsection, an inverted pendulum on a cart nonlinear mechanical system is considered. In general, this system has two degrees of freedom. The mathematical model is described as follows:
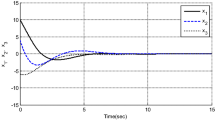
where \(m_{c}\) and \(m_{p}\) are the mass of the cart and the pendulum respectively. I represents the center of mass of pendulum inertia, and d is a distance between the center of mass and the pendulum pivot, and g is gravity acceleration. \(f_{c} \left( t \right)\) and \(\tau_{c} \left( t \right)\) are non-conservative forces. The parameters are the same with literature [10], in this paper, we will omit it. In Fig. 1, the horizontal displacement of the cart converges to zero in about 6 s using the finite time stable scheme, whereas it takes the asymptotic stable about 9 s to converge to zero.

Displacement of the cart
From Fig. 1, we can see that the rapidly exponentially stable control law is better than the asymptotic stable control law and finite time control law at the beginning. That is to say, the rapidly exponentially stabilization is suit to real time control systems. From Fig. 2, it is easy can be seen that the time for the finite time stable controller shows that the rotational displacement of the pendulum converges to zero after about 6 s. Whereas the rapidly exponentially controller shows that the rotational displacement of the pendulum converges to zero after about 5 s and the asymptotic controller need about 9 s. Figure 3 shows that the velocity of the cart over the time. From the figure, we can see that the rapidly exponentially stable controller is better than the others. Figure 4 shows that the rate of change of the rotational displacement.

Rotational displacement of the pendulum

Velocity of the cart

Rate of change of the rotational displacement
3.2 Two Link Planar Manipulator System
In this subsection, a two-link planar manipulator system of nonlinear mechanical system is considered. The mathematical model is described as follows:
\(M\left( q \right)\ddot{q} + C\left( {q,\dot{q}} \right)\dot{q} + G\left( q \right) = F\left( {q,\dot{q}} \right)\).
The nonlinear model is of the form given by the following equations
This nonlinear model assumes that the non-conservative forces acting on the system are the control input torques. Figure 5 shows that the link 1 rotation angle versus time. From the Fig. 5, we can see that the rapidly exponentially stable controller is better than the other controllers. It is shows that the continuous feedback controller of this paper is fit to the real time control systems. Figure 6 shows that the link 2 rotation angle versus time. From Fig. 6, we can see that the state of nonlinear mechanical systems converge to equilibrium about 9 s.

Link 1 rotation angle

Link 2 rotation angle
However, at the beginning, the rapidly exponentially controller is better than the others. Figure 7 represents angular velocity of link 1 and Fig. 8 shows that angular velocity of link 2. From Figs. 7 and 8, we can see that the states of mechanical systems converge to equilibrium at 8 s.

Angular velocity of link 1

Angular velocity of link 2
4 Conclusion and Future Work
In this paper, a novel approach of continuous feedback control law is developed for nonlinear mechanical systems. According to the vector value function, some properties are satisfied that ensure when this vector value function converges to zero, the state of nonlinear mechanical systems converges to the desired state in accelerated time. Therefore, due to the vector value function, a new Lyapunov function is constructed for nonlinear mechanical systems. Moreover, a continuous feedback control law is used to obtain rapidly exponential stability in accelerated time. Numerical results are illustrated on two classical nonlinear mechanical systems, for instance, an inverted pendulum on a cart and a planar two-link manipulator. Furthermore, comparisons with asymptotic stability and finite time stability for both examples show that the rapidly exponentially stabilization scheme has superior convergence rate while requiring lower control effort. Future work will generalize such rapidly exponentially stabilizing control schemes to multi-body systems.
References
Khalil HK (2002) Nonlinear systems, 3rd edn. Prentice-Hall, Upper Saddle River
Sontag ED (1998) Mathematical control theory: deterministic finite dimensional systems, vol 6. Springer, New York
Tan W, Packard A (2008) Stability region analysis using polynomial and composite polynomial Lyapunov functions and sum-of-squares programming. IEEE Trans Autom Control 53(2):565–571
Wang Z, Liu X, Liu K, Li S, Wang H (2016) Backstepping-based Lyapunov function construction using approximate dynamic programming and sum of square techniques. IEEE Trans Cybern 99. doi:10.1109/TCYB.2016.2574747
Guelton K, Manamanni N, Duong CC, Koumba-Emianiwe DL (2013) Sum-of-squares stability analysis of Takagi-Sugeno systems based on multiple polynomial Lyapunov functions. Int J Fuzzy Syst 15(1):1–8
Topcu U, Packard A, Seiler P (2008) Local stability analysis using simulations and sum-of-squares programming. Automatica 44(10):2669–2675
Liberzon D, Sontag ED, Wang Y (2002) Universal construction of feedback laws achieving ISS and integral-ISS disturbance attenuation. Syst Control Lett 46:111–127
Sontag E (1989) A ‘universal’ construction of Artstein’s theorem on nonlinear stabilization. Syst Control Lett 13:117–123
Artstein Z (1983) Stabilization with relaxed controls. Nonlinear Anal Theory Methods Appl 7(11):1163–1173
Sanyal Amit K, Bohn Jan (2015) Finite-time stabilisation of simple mechanical systems using continuous feedback. Int J Control 88(4):783–791
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer Nature Singapore Pte Ltd.
About this paper
Cite this paper
Shi, T., Sun, Z. (2018). A Novel Continuous Feedback Control for Rapidly Exponentially Stabilisation of Mechanical Systems. In: Deng, Z. (eds) Proceedings of 2017 Chinese Intelligent Automation Conference. CIAC 2017. Lecture Notes in Electrical Engineering, vol 458. Springer, Singapore. https://doi.org/10.1007/978-981-10-6445-6_7
Download citation
DOI: https://doi.org/10.1007/978-981-10-6445-6_7
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-6444-9
Online ISBN: 978-981-10-6445-6
eBook Packages: EngineeringEngineering (R0)