
Abstract
The present work aims to evaluate the response of Duffing oscillator using equivalent linearization. The stiffness and damping forces are proportional to the cube power of the displacement and velocity, respectively. The oscillator is excited by stationary process. The method suggested in this work aims to replace the original nonlinear system with an equivalent linear system by minimizing the difference in the displacement between the nonlinear system and the equivalent linear system in a least square sense using different constraints (e.g., restoring force, potential energy, complementary energy). Numerical results are presented to show the efficiency of the proposed linearization scheme. For this purpose, instantaneous mean square values of the displacement are evaluated and compared with simulation. A close agreement between the simulations and the proposed model is observed which, in turn, shows the efficiency and applicability of the proposed model. A discussion on the use of different constraint conditions and their relative importance is also presented.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Analytical solutions of stochastic nonlinear systems have remained an open area of research due to its inherent difficulties. Caughey [2] developed analytical solutions for linear and nonlinear systems excited by white noise. In this process, they used Markov process theory, and the response was evaluated by solving the corresponding Fokker–Planck–Kolmogorov (FPK) equation. Hammond [9] modeled the response of stochastic linear oscillator using spectral representation of the nonstationary processes. However, these closed-form solutions are limited to certain class of nonlinearities and excitations. Due to these limitations, researchers and engineers developed various approximate solutions for wide range of nonlinearity and excitations. Some of these techniques are equivalent linearization, closure approximations, and perturbation techniques. Among these approximate solutions, equivalent linearization is very popular among the engineers and the scientists for its simplicity and computational efficiency. Due to this reason, it has become a standard tool for stochastic response analysis of nonlinear dynamic systems, wherein the nonlinear system is replaced by a linear system whose parameters are optimized in stochastic least square sense.
Caughey [3] developed this technique for weakly nonlinear systems. Bulsara et al. [1] modeled the response of a cubic nonlinear system driven by Gaussian white noise. They showed that the results obtained by equivalent linearization had good agreement with the experimentally obtained responses. Iyengar [10] derived expression for the second moment of the response of Duffing oscillator excited by broad-banded signal. In this context, a comprehensive guideline on equivalent linearization for a wide range of nonlinear systems and excitations processes can be found in Roberts and Spanos [15]. Wu [17] compared equivalent linearization and Gaussian closure for different classes of nonlinearities (parametrically excited nonlinear systems and hysteretic system). In this study, the author showed that both the techniques provide same response. Similar observations were presented by Noori and Davoodi [12] while modeling stochastic response of nonlinear systems using equivalent linearization. Grigoriu [7, 8] and Proppe [13] used equivalent linearization for different classes of input processes (e.g., Levy white noise, Poisson process). Mickens [11] used this technique along with first-order averaging to solve general nonlinear systems where limit cycles exist. Ricciardi [14] used a modified Gram–Charlier series approximation of the probability density function to develop a non-Gaussian stochastic linearization method of nonlinear structural systems under white noise excitation. However, equivalent linearization used in all these studies used unconstrained stochastic least square optimization. Although the error between the nonlinear system and the equivalent linear system is minimized to obtain the parameters of the system, it does not ensure that the equivalent linear system will have same restoring force and/or other properties of the nonlinear system. In this context, Elishakoff and Zhang [4] and Elishakoff and Bert [5] suggested different criteria for stochastic least square optimization. Elishakoff [6] suggested new approach to evaluate the parameters of the equivalent linear system using force, potential energy, and complementary energy as the linearization criteria. Sobiechowski and Socha [16] developed different linearization criteria and modeled the response of Duffing oscillator under non-Gaussian excitations. However, all these criteria for stochastic linearization were used independently.
With this in view, the present work develops an equivalent linearization scheme for Duffing oscillator which minimizes the difference between the response of nonlinear and the equivalent linear system using constraints on equivalence of force, potential energy, and complementary energy. For this purpose, Lagrange multiplier technique is adopted to evaluate the optimized parameters of the linear system, which are driven by different stationary excitation processes. The results obtained using various constraints are compared with the simulations to prove the accuracy of the proposed linearization scheme. It also helps to identify the relative impact of different constraints on the global response.
2 Problem Formulation
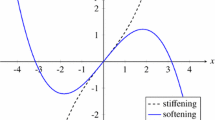
Figure 1 shows the Duffing oscillator used in this study whose governing equation of motion is given by
where \( g(x,\dot{x}) \) is the nonlinear function that describes the energy dissipation and the force associated with the spring and is given by

Duffing oscillator
Parameters \( {\lambda_1} \) and \( {\lambda_2} \) control the extent of nonlinearity, while parameters \( \beta \) and \( {\omega_n} \) are the damping and the natural frequency of the corresponding linear system when \( {\lambda_1} \) and \( {\lambda_2} \) are zero. The nonlinear single degree of freedom system shown in Fig. 1 is replaced by a linear system whose governing equation is given by
In the above equation, \( {\beta_{\rm{eq}}} \) and \( {\omega_{\rm{eq}}} \) are the damping and the natural frequency of the equivalent linear system, which are evaluated by minimizing the error between Eqs. 1 and 3 in stochastic least square sense.
On squaring the error and taking expectation on both sides, one gets
Equation 4 is minimized with respect to the unknowns the parameters \( {\beta_{\rm{eq}}} \) and \( {\omega_{\rm{eq}}} \) The optimum values of these parameters are evaluated by solving the two equations formed by \( \frac{{\partial E[{\varepsilon^2}]}}{{\partial {\beta_{\rm{eq}}}}} = 0 \) and \( \frac{{\partial E[{\varepsilon^2}]}}{{\partial \omega_{\rm{eq}}^2}} = 0 \). By solving these two equations, one can show that
where \( \sigma_{\dot{x}}^2 \) and \( \sigma_x^2 \) are the unknown variance of \( x \) and \( \dot{x} \) , respectively. In absence of the stochastic response of the nonlinear system, these variances are approximately evaluated using the closed-form solution of the equivalent linear system excited by the stationary input. Using this approximation, the variances of displacement and velocity of the equivalent linear system can be evaluated as
In the above equation, \( H(\omega ) \) represents the frequency response function of the equivalent linear system which is given by
The stationary excitation \( f(t) \) is represented by its power spectral density \( {S_{ff}}(\omega ) \). In the present study, two different types of stationary excitations are considered for numerical analysis. The first one is the white noise process whose intensity is given by \( {S_{ff}}(\omega ) = {S_o} \) and the second one is the filtered white noise process as modeled in Kanai–Tajimi spectrum.
In the above equation, η g and ω g represent the parameters of the second-order linear filter. Using Eq. 6 in Eq. 5, one can solve the parameters of the equivalent system for different types of excitations. For the details of this solution procedure, one may refer to Roberts and Spanos [15]. However, this linearization scheme provides the optimal values of the parameters without guaranteeing the equivalence of the spring or damping force, potential energy stored in the two systems, and/or complementary energy in the two systems. With this in view, present study aims to modify the optimization technique by incorporating different constraints. It also aims to study the relative importance of these constraints on the overall performance of the linearization technique.
3 Statistical Linearization Using Constraints
As outlined earlier, Lagrange multiplier technique is adopted to optimize the objective function \( F \) along with constraints. The total Lagrangian is given by
where \( {\gamma_1} \) is the Lagrange multiplier. For this purpose, the objective function \( F \) is modeled as
where \( {\varepsilon_1} \) and \( {\varepsilon_2} \) are the errors in estimating damping and natural frequency as given in Eq. 5 and are given by
To evaluate the optimized parameters, the total Lagrangian in Eq. 9 is differentiated with respect to the unknowns and equated to zero which leads to simultaneous equations involving \( {\beta_{\rm{eq}}} \), \( \omega_{\rm{eq}}^2 \) and \( {\gamma_1} \) which are given by
In the present study, three different constraints are chosen for optimization. These are nonlinear force, potential energy, and complementary energy.
3.1 Constraint 1: Nonlinear Force
The nonlinear forcing function in the Duffing oscillator as shown in Fig. 1 can be modeled as
In the above equation, \( \varphi (x) \) and \( \psi (\dot{x}) \) are nonlinear forces associated with the stiffness and the energy dissipation. Using Eq. 6, the variance of the nonlinear force can be evaluated. In the first example, the variance of the nonlinear forcing function is used as the constraint condition, which is given by
In this context, it may be noticed that the constraint condition described in the above equation has the nonlinear force as a function of \( x \) and \( \dot{x} \) which are the displacement and velocity of the Duffing oscillator, respectively. As these responses are unknown at the beginning, they are approximated with the displacement and velocity response of the equivalent linear system. Using Eq. 12, one can develop simultaneous equations involving three unknowns \( {\beta_{eq}} \), \( \omega_{{eq}}^2 \) and \( {\gamma_1} \) which are given by
In the above equations, a, b, c, and d are the derivatives of \( \sigma_{\dot{x}}^2 \) and \( \sigma_x^2 \) with respect to \( \omega_{\rm{eq}}^2 \) and \( {\beta_{\rm{eq}}} \) . Using Eqs. 15a and 15b, one can remove \( {\gamma_1} \) and develop an equation with unknown parameters \( {\beta_{\rm{eq}}} \) and \( \omega_{\rm{eq}}^2 \). Using this equation along with Eq. 15c, one can solve the optimized unknown parameters in the light of constraint on the nonlinear force. It can be noticed from Eqs. 15a, 15b, and 15c that the reduced equations for \( {\beta_{\rm{eq}}} \), and \( \omega_{\rm{eq}}^2 \) are polynomial function. In the present study, these are solved in Symbolic Math Toolbox in MATLAB.
3.2 Constraint 2: Potential Energy
The potential energy of the Duffing oscillator considered in Fig. 1 is
It can be shown that the energy dissipated by this system is be given by
The variance of the potential energies of the nonlinear system is used as the constraint condition, which is given by
Substitution of expressions of \( P(x) \) and \( D(\dot{x}) \) in Eq. 18 and further simplification lead to a constraint equation for equivalence of potential energy. The numerical procedure outlined for evaluation of optimal parameters using Constraint 1 may be adopted here to obtain \( {\beta_{eq}} \) and \( \omega_{\rm{eq}}^2 \).
3.3 Constraint 3: Complementary Energy
The third constraint equation is obtained from complementary energy criterion. The complementary energy of the nonlinear spring and damper is given by
The difference in the square of the expected values of the complementary energies of the two systems gives the following expression for the third constraint:
After obtaining the constraint condition, the optimal parameters can be obtained by following the procedure mentioned for Constraint 1.
4 Numerical Results
Using the constrained linearization model outlined in the previous section for different cases, numerical analysis is carried out to study the performance of the proposed technique. For this purpose, the parameters of the nonlinear system \( \beta \), \( {\lambda_1} \) and \( {\lambda_2} \) are considered to be 5%, 0.1, and 0.1, respectively. As mentioned in the problem formulation, two different stationary processes are considered here. These are white noises with intensity \( {S_o} = 50{{\rm cm}^2}/{s^3} \) and Kanai–Tajimi spectrum with parameters \( {S_o} \), \( {\eta_g} \) and \( {\omega_g} \) equal to 50 cm2/s3, 0.4, and 10 rad/s, respectively. Using these parameters, numerical study is carried out to find out the optimal parameters of the equivalent linear system which are then used to evaluate the mean square value of the displacement response. Figure 2 shows the mean square value of \( x \) for different values of \( {\omega_n} \) when the system is subjected to white noise excitations. In this context C1, C2, and C3 represent Constraints 1, 2 and 3, respectively. It may be noticed that the mean square value corresponding to C1 and C2 closely match with the simulation results (i.e., Sim). The mean square response corresponding to C3 has a constant mismatch over the entire domain of \( {\omega_n} \). Figure 3 shows the mean square values of nonlinear force (F), potential energy (PE), and complementary energy (CE) for the optimal solution of \( {\beta_{\rm{eq}}} \) and \( {\omega_{\rm{eq}}} \) over different values of \( {\omega_n} \). From this figure, it can be noticed that the nonlinear forces obtained from different constraint conditions closely match with the simulation result. Also it may be noticed that the potential energy corresponding to higher \( {\omega_n} \) closely matches with the simulation result. The mismatch in potential energy in case of higher time period may be due to the assumption of replacing the stochastic response of the nonlinear system with that of the linear system as described in Eq. 20. The complementary energy obtained from three constraint conditions again shows a mismatch with the simulation result which indicates that Lagrange multiplier technique with this constraint does not provide the best feasible solution.

Mean square value of \( x \) for different \( {\omega_n} \) for white noise excitation

Mean square value force, PE, and CE for different \( {\omega_n} \) for white noise excitation
The mean square value of the response for various natural frequencies \( {\omega_n} \) for Kanai–Tajimi excitations is shown in Fig. 4. It can be observed that mean square values pertaining to constraints C1 and C2 match closely with the simulation results over the entire range. Further, for lower time period the mean square values corresponding to all the constraints match with simulation. Figure 5 shows the mean square values of force (F), potential energy (PE), and complementary energy (CE) corresponding to C1, C2, and C3. Similar to white noise excitation, for filtered white noise also the nonlinear force matches closely with the simulation over the entire range of natural frequencies. In case of filtered white noise, the mean square value of potential energy also matches closely with the simulation result. One may notice a slight deviation from the simulation results around 10 rad/s which may be attributed to resonance.

Mean square value of x for different ω n for Kanai–Tajimi excitation

Force mean square value force, PE, and CE for different ω n for Kanai–Tajimi excitation
Figures 6a and 7a show the phase plots of the response of the nonlinear system, while Figs. 6b and 7b show the phase plots of the equivalent linear system for \( {\omega_n} = 25{\rm rad} /s \). For brevity, phase plots are compared for Constraint 2 only. In both the figures, good similarity in results is observed between simulation and the equivalent linear system which shows that the equivalent linear system is able to emulate the random response of the nonlinear system.

Phase plot at ω n = 25 rad/s for broad-banded excitation. (a) The nonlinear system. (b) The equivalent linear system

Phase plot at ω n = 25 rad/s for narrow-banded excitation. (a) The nonlinear system. (b) The equivalent linear system
5 Conclusion
In this chapter, statistical linearization of Duffing oscillator is developed to study the impact of different constraint on the global response. For this purpose, three different constraints are used which are nonlinear force, potential energy, and complementary energy. The mean square value of the response for a wide range of frequencies and different stationary inputs are presented here. From these results, it may be concluded that the constraints on nonlinear force and potential energy closely match with the simulation result which prove their accuracy and efficiency. In this context, it may be mentioned that constraints associated with complementary energy do not provide satisfactory result over a wide range of frequencies. With this in view, it may be concluded that the proposed Gaussian linearization technique for stationary excitation using constraints associated with nonlinear force and potential energy may be adopted for the stochastic response analysis of Duffing oscillator.
References
Bulsara AR, Katja L, Shuler KE, Rod F, Cole WA (1982) Analog computer simulation of a duffing Oscillator and comparison with statistical linearization. Int J Non-Linear Mech 17(4):237–253
Caughey T (1963) Derivation and application of Fokker-Planck equation to discrete dynamics system subjected to white random excitation. J Acoust Soc Am 35:1683–1692
Caughey T (1963) Equivalent linearization techniques. J Acoust Soc Am 35:1706–1711
Elishakoff I, Zhang XT (1992) An appraisal of different stochastic linearization criteria. J Sound Vib 153:370–375
Elishakoff I, Bert CW (1999) Complementary energy criterion in nonlinear stochastic dynamics. In: Melchers RL, Stewart MG (eds) Application of stochastic and probability. A. A. Balkema, Rotterdam, pp 821–825
Elishakoff I (2000) Multiple combinations of the stochastic linearization criteria by the moment approach. J Sound Vib 237(3):550–559
Grigoriu M (1995) Equivalent linearization for Poisson White noise input. Probab Eng Mech 10:45–51
Grigoriu M (2000) Equivalent linearization for systems driven by Levy White noise. Probab Eng Mech 15:185–190
Hammond J (1973) Evolutionary spectra in random vibrations. J R Stat Soc 35:167–188
Iyengar RN (1988) Stochastic response and stability of the Duffing oscillator under narrow band excitation. J Sound Vib 126(2):255–263
Mickens R (2003) A combined equivalent linearization and averaging perturbation method for non-linear oscillator equations. J Sound Vib 264:1195–1200
Noori M, DavoodI H (1990) Comparison between equivalent linearization and Gaussian closure for random vibration analysis of several nonlinear systems. Int J Eng Sci 28(9):897–905
Proppe C (2003) Stochastic linearization of dynamical systems under parametric Poisson White noise excitation. Int J Non-Linear Mech 38:543–555
Ricciardi G (2007) A non-Gaussian stochastic linearization method. Probab Eng Mech 22:1–11
Roberts J, Spanos P (1990) Random vibration and statistical linearization. Wiley, New York
Sobiechowski C, Socha L (2000) Statistical linearization of the duffing oscillator under non-Gaussian external excitation. J Sound Vib 231:19–35
Wu W-F (1987) Comparison of Gaussian closure technique and equivalent linearization method. Probab Eng Mech 2(1):2–8
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer India
About this paper
Cite this paper
Kameshwar, S., Chakraborty, A. (2013). Statistical Linearization of Duffing Oscillator Using Constrained Optimization Technique. In: Chakraborty, S., Bhattacharya, G. (eds) Proceedings of the International Symposium on Engineering under Uncertainty: Safety Assessment and Management (ISEUSAM - 2012). Springer, India. https://doi.org/10.1007/978-81-322-0757-3_43
Download citation
DOI: https://doi.org/10.1007/978-81-322-0757-3_43
Published:
Publisher Name: Springer, India
Print ISBN: 978-81-322-0756-6
Online ISBN: 978-81-322-0757-3
eBook Packages: EngineeringEngineering (R0)