
Abstract
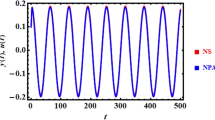
In this paper, a new method for controlling nonlinear mechanical systems is proposed. The methodology developed in this work is based on the use of the Udwadia-Kalaba equations in conjunction with the modern techniques of optimal control. The Udwadia-Kalaba equations represent an effective method for solving forward and inverse dynamics problems in the same analytical framework. On the other hand, the optimal control method is used in this work in combination with the inverse dynamic approach based on the Udwadia-Kalaba equations in order to obtain a nonlinear tracking controller. The mechanical system considered in this paper for performing numerical experiments is a nonlinear oscillator which includes in a generalized form the Van der Pol model for the system damping and the Duffing model for the system stiffness. The numerical results presented in this paper demonstrate the effectiveness of the method developed in this investigation.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
Villecco, F.: On the evaluation of errors in the virtual design of mechanical systems. Machines 6, 36 (2018)
Sena, P., Attianese, P., Pappalardo, M., Villecco, F.: FIDELITY: fuzzy inferential diagnostic engine for on-line support to physicians. In: Proceedings of the 4th International Conference on the Development of Biomedical Engineering in Vietnam, Ho Chi Minh City, Vietnam, 8–10 January 2012, pp. 396–400 (2012)
Ghomshei, M., Villecco, F., Porkhial, S., Pappalardo, M.: Complexity in energy policy: a fuzzy logic methodology. In: Proceedings of the 6th International Conference on Fuzzy Systems and Knowledge Discovery, Tianjin, China, 14–16 August 2009, vol. 7, pp. 128–131. IEEE, Los Alamitos (2009)
Zhai, Y., Liu, L., Lu, W., Li, Y., Yang, S., Villecco, F.: The application of disturbance observer to propulsion control of sub-mini underwater robot. In: Proceedings of the ICCSA 2010 International Conference on Computational Science and Its Applications, Fukuoka, Japan, 23–26 March 2010, pp. 590–598
Sena, P., D’Amore, M., Pappalardo, M., Pellegrino, A., Fiorentino, A., Villecco, F.: Studying the influence of cognitive load on driver’s performances by a fuzzy analysis of lane keeping in a drive simulation. IFAC Proc. 46, 151–156 (2013)
Ghomshei, M., Villecco, F.: Energy metrics and sustainability. In: Proceedings of the International Conference on Computational Science and Its Applications, Seoul, Korea, 29 June–2 July 2009, pp. 693–698 (2009)
Sena, P., Attianese, P., Carbone, F., Pellegrino, A., Pinto, A., Villecco, F.: A fuzzy model to interpret data of drive performances from patients with sleep deprivation. Comput. Math. Methods Med. 2012, 5 (2012). 868410
Zhang, Y., Li, Z., Gao, J., Hong, J., Villecco, F., Li, Y.: A method for designing assembly tolerance networks of mechanical assemblies. Math. Probl. Eng. 2012, 26 (2012). 513958
Villecco, F., Pellegrino, A.: Evaluation of uncertainties in the design process of complex mechanical systems. Entropy 19, 475 (2017)
Pellegrino, A., Villecco, F.: Design optimization of a natural gas substation with intensification of the energy cycle. Math. Probl. Eng. 2010, 10 (2010). 294102
Barbagallo, R., Sequenzia, G., Cammarata, A., Oliveri, S.M., Fatuzzo, G.: Redesign and multibody simulation of a motorcycle rear suspension with eccentric mechanism. Int. J. Int. Des. Man. 12, 517–524 (2018)
Barbagallo, R., Sequenzia, G., Oliveri, S.M., Cammarata, A.: Dynamics of a high-performance motorcycle by an advanced multibody/control co-simulation. Proc. Inst. Mech. Eng. Part K J. Eng. 230, 207–221 (2016)
Oliveri, S.M., Sequenzia, G., Calí, M.: Flexible multibody model of desmodromic timing system. Mech. Based Des. Struct. 37, 15–30 (2009)
Barbagallo, R., Sequenzia, G., Cammarata, A., Oliveri, S.M.: An integrated approach to design an innovative motorcycle rear suspension with eccentric mechanism. Advances on Mechanics, Design Engineering and Manufacturing, pp. 609–619. Springer, Cham (2017)
Calí, M., Oliveri, S.M., Sequenzia, G.: Geometric modeling and modal stress formulation for flexible multi-body dynamic analysis of crankshaft. In: Proceedings of the 25th Conference and Exposition on Structural Dynamics 2007, Orlando, FL, USA, 19–22 February 2007, pp. 1–9 (2007)
Cammarata, A.: A novel method to determine position and orientation errors in clearance-affected overconstrained mechanisms. Mech. Mach. Theory 118, 247–264 (2017)
Cammarata, A., Calió, I., Greco, A., Lacagnina, M., Fichera, G.: Dynamic stiffness model of spherical parallel robots. J. Sound Vib. 384, 312–324 (2016)
Cammarata, A., Lacagnina, M., Sequenzia, G.: Alternative elliptic integral solution to the beam deflection equations for the design of compliant mechanisms. Int. J. Interact. Des. Manuf. (IJIDeM), 1–7 (2018). https://doi.org/10.1007/s12008-018-0512-6
Cammarata, A., Sinatra, R., Maddio, P.D.: A two-step algorithm for the dynamic reduction of flexible mechanisms. In: Mechanism Design for Robotics, pp. 25–32. Springer, Cham (2018)
Muscat, M., Cammarata, A., Maddio, P.D., Sinatra, R.: Design and development of a towfish to monitor marine pollution. Euro-Mediterr. J. Environ. Integr. 3, 11 (2018)
Cammarata, A., Sinatra, R.: On the elastostatics of spherical parallel machines with curved links. In: Recent Advances in Mechanism Design for Robotics, pp. 347–356. Springer, Cham (2015)
Cammarata, A., Lacagnina, M., Sinatra, R.: Dynamic simulations of an airplane-shaped underwater towed vehicle marine. In: Proceedings of the 5th International Conference on Computational Methods in Marine Engineering, Hamburg, Germany, 29–31 May 2013, pp. 830–841, Code 101673 (2013). ISBN 978-849414074-7
Cammarata, A., Angeles, J., Sinatra, R.: Kinetostatic and inertial conditioning of the McGill Schonflies-motion generator. Adv. Mech. Eng. 2, 186203 (2010)
Cammarata, A.: Unified formulation for the stiffness analysis of spatial mechanisms. Mech. Mach. Theory 105, 272–284 (2016)
Cammarata, A.: Optimized design of a large-workspace 2-DOF parallel robot for solar tracking systems. Mech. Mach. Theory 83, 175–186 (2015)
Kirk, D.E.: Optimal Control Theory: An Introduction. Springer, New York (1970)
Lewis, F.L., Vrabie, D., Syrmos, V.L.: Optimal Control. Wiley, Chichester (2012)
Khalil, H.K.: Nonlinear Control. Pearson, New York (2015)
Udwadia, F.E., Kalaba, R.E.: Analytical Dynamics: A New Approach. Cambridge University Press, Cambridge (2007)
Udwadia, F.E., Weber, H.I., Leitmann, G.: Dynamical Systems and Control. CRC Press, Boca Raton (2016)
Udwadia, F.E.: Equations of motion for constrained multibody systems and their control. J. Optim. Theory Appl. 127, 627–638 (2005)
Udwadia, F.E.: Inverse problem of Lagrangian mechanics for classically damped linear multi-degrees-of-freedom systems. J. Appl. Mech. 83(10), 104501 (2016)
Udwadia, F.E.: Optimal tracking control of nonlinear dynamical systems. Proc. R. Soc. Lond. A Math. Phys. Eng. Sci. 464, 2341–2363 (2008)
Udwadia, F.E., Kalaba, R.E.: A new perspective on constrained motion. Proc. Math. Phys. Sci. 1992, 407–410 (1992)
Udwadia, F.E., Kalaba, R.E.: On the foundations of analytical dynamics. Int. J. Non-Linear Mech. 37(6), 1079–1090 (2002)
Udwadia, F.E., Koganti, P.B.: Optimal stable control for nonlinear dynamical systems: an analytical dynamics based approach. Nonlinear Dyn. 82(1–2), 547–562 (2015)
Koganti, P.B., Udwadia, F.E.: Unified approach to modeling and control of rigid multibody systems. J. Guidance Control Dyn. 2016, 2683–2698 (2016)
Koganti, P.B., Udwadia, F.E.: Dynamics and precision control of tumbling multibody systems. J. Guid. Control Dyn. 40(3), 584–602 (2017)
Koganti, P.B., Udwadia, F.E.: Dynamics and precision control of uncertain tumbling multibody systems. J. Guidance Control Dyn. 40(5), 1176–1190 (2017)
Schutte, A., Udwadia, F.: New approach to the modeling of complex multibody dynamical systems. J. Appl. Mech. 78, 021018 (2011)
Cho, H., Wanichanon, T., Udwadia, F.E.: Continuous sliding mode controllers for multi-input multi-output systems. Nonlinear Dyn. 94(4), 2727–2747 (2018)
Mylapilli, H., Udwadia, F.E.: Control of three-dimensional incompressible hyperelastic beams. Nonlinear Dyn. 90(1), 115–135 (2017)
Wanichanon, T., Cho, H., Udwadia, F.: Satellite formation-keeping using the fundamental equation in the presence of uncertainties in the system. In: AIAA SPACE 2011 Conference and Exposition 2011, vol. 7210 (2011)
Wanichanon, T., Udwadia, F.E., Cho, H.: Formation-keeping of uncertain satellites using nonlinear damping control. J. Res. Appl. Mech. Eng. 2(1), 20–33 (2014)
Wanichanon, T., Udwadia, F.E.: Nonlinear damping control for uncertain nonlinear multi-body mechanical systems. J. Res. Appl. Mech. Eng. 2(1), 7–19 (2014)
Udwadia, F.E., Phohomsiri, P.: Generalized LM-inverse of a matrix augmented by a column vector. Appl. Math. Comput. 190(2), 999–1006 (2007)
Udwadia, F.E., Phohomsiri, P.: Recursive formulas for the generalized LM-inverse of a matrix. J. Optim. Theory Appl. 131(1), 1–16 (2006)
Udwadia, F.E., Phohomsiri, P.: Explicit equations of motion for constrained mechanical systems with singular mass matrices and applications to multi-body dynamics. In: Proceedings of the Royal Society of London A: Mathematical, Physical and Engineering Sciences, vol. 462, No. 2071, pp. 2097–2117, July 2006
Udwadia, F.E., Phohomsiri, P.: Recursive determination of the generalized Moore-Penrose M-inverse of a matrix. J. Optim. Theory Appl. 127(3), 639–663 (2005)
Udwadia, F.E., Kalaba, R.E., Phohomsiri, P.: Mechanical systems with nonideal constraints: explicit equations without the use of generalized inverses. J. Appl. Mech. 71(5), 615–621 (2004)
Heydari, A., Balakrishnan, S.N.: Finite-horizon control-constrained nonlinear optimal control using single network adaptive critics. IEEE Trans. Neural Networks Learn. Syst. 24(1), 145–157 (2013)
Lin, Q., Loxton, R., Teo, K.L.: The control parameterization method for nonlinear optimal control: a survey. J. Ind. Manag. Optim. 10(1), 275–309 (2014)
Dierks, T., Jagannathan, S.: Optimal control of affine nonlinear continuous-time systems. In: IEEE American Control Conference (ACC), pp. 1568–1573, June 2010
Xin, M., Pan, H.: Nonlinear optimal control of spacecraft approaching a tumbling target. Aerosp. Sci. Technol. 15(2), 79–89 (2011)
Liu, D., Wei, Q.: Finite-approximation-error-based optimal control approach for discrete-time nonlinear systems. IEEE Trans. Cybern. 43(2), 779–789 (2013)
Wang, D., Liu, D., Wei, Q., Zhao, D., Jin, N.: Optimal control of unknown non affine nonlinear discrete-time systems based on adaptive dynamic programming. Automatica 48(8), 1825–1832 (2012)
Bryson, A.E.: Applied optimal control: optimization, estimation and control. Routledge (2018)
Bryson, A., Ho, Y.C.: Applied Optimal Control: Optimization, Estimation, and Control (Revised Edition). Taylor and Francis, Pennsylvania (1975)
Bryson, A.E.: Optimal control-1950 to 1985. IEEE Control Syst. 16(3), 26–33 (1996)
Weinreb, A., Bryson, A.: Optimal control of systems with hard control bounds. IEEE Trans. Autom. Control 30(11), 1135–1138 (1985)
De Simone, M.C., Rivera, Z.B., Guida, D.: Obstacle avoidance system for unmanned ground vehicles by using ultrasonic sensors. Machines 6, 18 (2018)
De Simone, M.C., Russo, S., Rivera, Z.B., Guida, D.: Multibody model of a UAV in presence of wind fields. In: Proceedings of the 2017 International Conference on Control, Artificial Intelligence, Robotics and Optimization (ICCAIRO), Prague, Czech Republic, 20–22 May 2017, pp. 83–88 (2017)
De Simone, M.C., Guida, D.: Identification and control of a unmanned ground vehicle by using arduino. UPB Sci. Bull. Ser. D 80, 141–154 (2018)
De Simone, M.C., Guida, D.: On the development of a low-cost device for retrofitting tracked vehicles for autonomous navigation. In: Proceedings of the 23rd Conference of the Italian Association of Theoretical and Applied Mechanics, Salerno, Italy, 4–7 September 2017, vol. 4, pp. 71–82 (2017)
De Simone, M.C., Guida, D.: Control design for an under-actuated UAV model. FME Trans. 46, 443–452 (2018)
De Simone, M.C., Guida, D.: Modal coupling in presence of dry friction. Machines 6, 8 (2018)
De Simone, M.C., Rivera, Z.B., Guida, D.: Finite element analysis on squeal-noise in railway applications. FME Trans. 46, 93–100 (2018)
De Simone, M.C., Guida, D.: Object Recognition by Using Neural Networks For Robotics Precision Agriculture Application. Eng. Lett. (2019, in press)
Concilio, A., De Simone, M.C., Rivera, Z.B., Guida, D.: A new semi-active suspension system for racing vehicles. FME Trans. 45, 578–584 (2017)
Quatrano, A., De Simone, M.C., Rivera, Z.B., Guida, D.: Development and implementation of a control system for a retrofitted CNC machine by using Arduino. FME Trans. 45, 565–571 (2017)
Ruggiero, A., Affatato, S., Merola, M., De Simone, M.C.: FEM analysis of metal on UHMWPE total hip prosthesis during normal walking cycle. In: Proceedings of the 23rd Conference of the Italian Association of Theoretical and Applied Mechanics, Salerno, Italy, 4–7 September 2017, vol. 2, pp. 1885–1892 (2017)
Ruggiero, A., De Simone, M.C., Russo, D., Guida, D.: Sound pressure measurement of orchestral instruments in the concert hall of a public school. Int. J. Circuits Syst. Signal Process 10, 75–81 (2016)
De Simone, M.C., Guida, D.: Dry friction influence on structure dynamics. In: Proceedings of the COMPDYN 2015 - 5th ECCOMAS Thematic Conference on Computational Methods in Structural Dynamics and Earthquake Engineering, Crete Island, Greece, pp. 4483–4491 (2015)
Iannone, V., De Simone, M.C., Modelling of a DC gear motor for feed-forward control law design for unmanned ground vehicles. Actuators (2019, Submitted)
Rivera, Z.B., De Simone, M.C., Guida, D.: Modelling of mobile robots in ROS-based environments. Robotics (2019, Submitted)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

Cite this paper
Pappalardo, C.M., Guida, D. (2020). On the Use of the Udwadia-Kalaba Equations for the Nonlinear Control of a Generalized Van Der Pol-Duffing Oscillator. In: Karabegović, I. (eds) New Technologies, Development and Application II. NT 2019. Lecture Notes in Networks and Systems, vol 76. Springer, Cham. https://doi.org/10.1007/978-3-030-18072-0_9
Download citation
DOI: https://doi.org/10.1007/978-3-030-18072-0_9
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-18071-3
Online ISBN: 978-3-030-18072-0
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)