
Abstract
In this chapter, brief history and current status of soft actuators made of various materials driven by different stimuli are described with typical references as milestones of the progress. The soft actuators originated from unique characteristics of cross-linked polymer gels for understanding their physical and chemical properties of dimensional changes and phase transitions induced by various environmental stimuli such as pH, salt, solvent, heat, light, and electric field. The ‘explosion’ of research and development of soft actuators in the 1990s extended over a variety of materials such as conductive polymers, elastomers, carbon nanotubes, and biomaterials, which had driven further progress in soft actuators not only from the fundamental viewpoint of basic science and materials chemistry and physics but also from the engineering viewpoint for the practical applications to light-weight, low-cost, no-noise, less-pollution, and high-efficiency micro- and macro-artificial muscles and soft robotic systems.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
1 Introduction
Soft actuators made of synthetic or natural materials, capable of converting chemical or physical energy into mechanical work in response to various environmental stimuli such as pH, salt, solvent, heat, humidity, electric or magnetic field, and light, have attracted considerable attention for biomimetic or bioinspired systems which underlie the motility of all living organisms. Differing from conventional mechanical transducers such as electric motors, combustion engines, and hydraulic pumps in which the motion is generated via changes of relative positions between their components, the soft actuators exhibit flexible motion through shape or volume changes due to accumulation and integration of microscopic conformational changes at the molecular level into a macroscopic large deformation of the actuator materials.
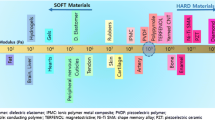
A variety of soft actuators has so far been developed not only from the fundamental viewpoint of basic science and materials chemistry and physics, but also from the engineering viewpoint for the practical applications to light-weight, low-cost, no-noise, less-pollution, and high-efficiency micro- and macro-artificial muscles and soft robotic systems [1–12]. The soft actuators may be classified according to the material and stimuli as listed in Fig. 1.1, in which typical references are cited chronologically as milestones of the progress in research and development of soft actuators:

List of typical soft actuators using various materials driven by different stimuli
-
(a)
gel (pH, salt, solvent, heat, light, electric and magnetic fields)
-
(b)
conductive polymer (CP) (electric field and humidity)
-
(c)
elastomer (electric field and light)
-
(d)
carbon nanotube (CNT) (electric field etc.)
-
(e)
biomaterial (ATP etc.)
2 Gel Actuators
2.1 pH-Responsive Gels
In 1949 Katchalsky and Kuhn [86–88] reported that water-swollen gels such as poly(acrylic acid) (PAA) crosslinked with glycerin or poly(vinyl alcohol) (PVA) via esterification can convert chemical energy directly into mechanical work under isometric conditions. The PAA gel exhibited reversible contraction and expansion in length by ca. 20 % repeatedly in response to alternate addition of acid and base. The principle was based on the reversible ionization of polyelectrolyte bearing carboxylic acid groups caused by pH changes, in which the dimensional changes of the gel was dependent on the degree of crosslinking.
2.2 Salt-Responsive Gels
Katchalsky et al. developed chemomechanical engines working on chemical melting and crystallization of crosslinked collagen fibers by treating with solutions of salts such as LiBr, KSCN, or Urea [83]. The mechanochemical engine generated high power-to-weight ratio of 30 mW/g (collagen) which was close to that of skeletal muscles (50 mW/g). Furthermore, Sussman and Katchalsky built chemomechanical turbines [84] and thermodynamic study of mechanochemical availability was theoretically investigated [85]. The power density and efficiency of energy conversion of the mechanochemical turbine attained as high as 0.79 J/g and 40 %, respectively.
2.3 Solvent-Responsive Gels
Tanaka discovered that hydrolyzed poly(acrylamide) (PAAm) gels immersed in acetone-water mixtures underwent a discontinuous volume collapse as large as 350-fold when the acetone concentration increased and reached a critical value [74]. According to the Flory–Huggins theory, the drastic volume change is accounted for by the osmotic pressure of protons dissociated from the carboxylic acid groups formed by hydrolysis of the PAAm network. Suzuki devised a solvent-responsive ‘gel-arm’ made of poly(vinylalcohol)-poly(acrylic acid)-poly(allylamine) (PVA-PAA-PAlAm) rubberlike elastic gel films by means of a repeated freezing (at −50 °C) and thawing (at room temperature) processes [76]. The cryoSEM image clearly shows that the resulting gel has a porous structure, which favors fast diffusion of solvent between inside and outside the gel. The PVA-PAA-PAlAm gel film showed rapid contraction and expansion (30 % under free loading and 10 % under 0.2 MPa) by altering the solvent between acetone and water, where the power density attained as high as 0.1 W/g that was close to the value of skeletal muscles.
2.4 Thermo-Responsive Gels
Osada developed chemomechanical systems based on a polymer association between poly(methacrylic acid) (PMMA) and poly(ethylene glycol) (PEG) through hydrogen bonding [77]. The PMMA membrane in the PEG solution contracted by more than 40 % under isotonic conditions with increasing the temperature from 20 to 30 °C, where contractile stress generated in the membrane was 4–6 kg/cm2 under isometric conditions.
Poly(N-isopropylacrylamide) (PNIPAM), a typical thermo-responsive polymer with a lower critical solution temperature (LCST) in water at 32 °C, has been paid considerable attention not only from thermodynamic and kinetic of phase transition [75] but also for the promising applications in actuators, sensors, drug delivery systems, and cell cultures. Okano et al. found that a crosslinked PNIPAM gel bearing comb-like grafted side chains made of the PNIPAM exhibited fast deswelling compared to the conventional PNIPAM homopolymer gel [79], mechanism of which was based on a much greater aggregation force operating within the grafted side chains where the trapped water was rapidly squeezed out from the gel. Hirasa synthesized thermo-responsive poly(vinyl methyl ether) (PVME) gel crosslinked by γ-ray irradiation, which also showed a LCST in water at 37 °C [76]. The PVME gel fibers with a spongy-like porous structure prepared above the LCST exhibited quick and reversible swelling and shrinking where the fiber diameter changed from 400 nm at 20 °C to 200 nm at 40 °C.
Yoshida introduced the Belousov-Zhabotinsky (BZ) reactions in a thermo-responsive PNIPAM copolymer gel [81]. The ‘BZ gel’ shows mechanical oscillation induced by the chemical oscillation due to the periodic redox changes of Ru complex in the BZ reaction, where the phase transition temperature of the gel shifts from 33 °C at Ru2+ in the reduced stare (orange) to 36 °C at Ru3+ in the oxidized state (green) owing to the change in the hydrophilic/hydrophobic nature of polymer chains.
2.5 Electro-Responsive Gels
Electrically induced dimensional changes of gels was observed by Hamlen et al. in 1965 using a PVA-PAA fiber containing finely dispersed platinum powders [54]. When a negative voltage is applied, the fiber expands since the solution becomes alkaline due to evolution of hydrogen, while the fiber shrinks under positive voltages because the solution becomes acidic. Later, Grodzinski showed that collagen membrane immersed in an electrolyte solution deformed in the presence of an external electric field [55, 56]. The mechanism resulted from field-induced changes in inter-membrane salt concentration which in turn modify the internal double layer repulsive forces between the charged fibrils. DeRossi reported that a PVA-PAA membrane underwent shape changes by applying DC voltage, which was attributed to the change in ionization state of the membrane induced by electrochemical reactions near the electrodes [58, 69].
Since the first discovery of phase transitions in polymer gels by Tanaka in 1977 [73, 74, 78, 82], a variety of stimuli-responsive gels was widely and deeply studied from both fundamental and practical aspects (Fig. 1.1). He also demonstrated that the phase transition was also induced by the application of an electric field across the gel [68]. The electric forces on the charged sites of the network produce a stress gradient along the electric field lines in the gel, where there exists a critical stress below which the gel is swollen and above which the gel collapses. On the other hand, Osada and Hasebe found a crosslinked hydrogel inserted between a pair of electrodes underwent contraction by releasing water droplets in air [57]. When an external electric field is applied across the gel, the macro- and micro-ions receive electrical forces in the opposite direction. However, the macro-ions are stationary since they are chemically fixed to the polymer network, while the counter ions are mobile, capable of migrating along the electric field to the electrode.
From 1986 to 1991 the project “Development of Biomimetic Energy-Transducing Devices” was performed through Special Coordination Funds of Science and Technology Agency of the Japanese Government (Fig. 1.2) aimed at clarifying the mechanism of biomolecular machinery systems and designing the biomimetic energy-transducing devices. The project yielded many advanced gel actuators such as electro-responsive ‘gel-fish’ and ‘robot-hand’ made of PVA-PAA gels [61, 70, 71] (Toyota Central R&D Labs., Inc.). Okuzaki and Osada succeeded in fabricating a novel polymer gel actuator, namely ‘gel-looper’, with electrically driven worm-like motility [59]. The mechanism is based on an electrokinetic molecular assembly reaction of cationic surfactant molecules on the negatively charged hydrogel, which brings about a contraction of the gel surface due to hydrophobic aggregation of alkyl chains of the surfactant molecules. It was found that the gel-looper walked at a constant velocity of 25 cm/min in water by repeating bending and stretching under an alternating voltage.

Brochure of research project “Development of Biomimetic Energy-Transducing Devices” by Science and Technology Agency of the Japanese Government
Oguro and Asaka independently developed ionic polymer-metal composite (IPMC) actuators utilizing a nafion membrane whose surfaces were chemically plated with gold or platinum [60, 64] (Fig. 1.3). The IPMC bent toward the anode by applying an electric field, the mechanism of which was associated with the difference of swelling degree at both sides caused by an electrophoretic transport of protons carrying with water molecules. The IPMC actuators are flexible and suitable for downsizing capable of driving at low voltages (0.5–3 V), which provides medical applications such as micro-active catheters and guide wires. However, most of them operate in an electrolyte solution or in a swollen state. Recently, Asaka et al. developed tri-layer actuators utilizing a fluorinated polymer membrane containing ionic liquid as an active layer sandwiched between two bucky-gel layers consisting of single-walled carbon nanotubes dispersed in the ionic liquid as electrodes [65, 67]. The bucky-gel actuator shows reversible bending more than 8,000 cycles at 30 Hz in air, which is associated with the electrophoretic polarization of ionic liquid in the active layer.

Electro-responsive bending of ionic polymer-metal composite (IPMC)
Hirai first reported that dielectric gels made of PVA swollen in dimethyl sulfoxide exhibited rapid contraction of 8 % within 0.1 s under an electric field of 250 V/mm [62, 72]. Furthermore, plasticized poly(vinyl chloride) (PVC) gels showed amoeba-like pseudopodial deformations and applied to an electro-active artificial pupil. It was found that a displacement of 470 μm in the radial direction, corresponding to 100 % of the thickness of the pupil, was achieved within 6 s under 400 V [66].
2.6 Photo-Responsive Gels
Photo-responsive gels were investigated by designing polymers tethering photo-sensitive chromophores, such as azobenzene (cis–trans isomerization) [48], spirobenzopyrane (ring opening and closing) [49], N,N-dimethylamino groups (photo-ionization) [50], triphenylmethane leucocyanide groups (photo-ionization) [51] in the side or main chains. The mechanism of photo-responsive soft actuators was based on changes in polarity, free volume, phydrophilicity/hydrophobicity, having advantages such as fast response, remote operation, easy to downsize, and high efficiency. Suzuki and Tanaka reported the phase transition of gels induced by visible light, where the transition mechanism was due to the direct heating of the network polymers by light [52]. On the other hand, Misawa et al. showed a laser-induced volume phase transition of gels, in which the radiation force generated by a focused laser beam induced reversible shrinkage in polymer gels [53]. This can be explained in terms of the direct influence on the balance between repulsive intermolecular forces to expand the polymer network (electrostatic or hydrophobic repulsion) and attractive forces to shrink it (hydrogen bonding or van der Waals interactions).
2.7 Magneto-Responsive Gels
The magnetic field is also available for remote operation of soft actuators. Hirai fabricated PVA gels incorporating with magnetic fluids where strain of the magnetic gel was proportional to the square of the magnetic field [45]. On the other hand, Zrinyi developed ‘ferrogels’ made of crosslinked PVA hydrogels filled with magnetic particles (Fe3O4) with an average size of 10–12 μm and unidirectional magnetoelastic behavior was studied [47]. The elongation of ferrogel can be described by the Hook law where the modulus of the gel is not influenced by the presence of inhomogeneous external magnetic field. Recently, Mitsumata and coworkers demonstrated that the magnetic gels made of κ-carrageenan containing barium ferrite as ferromagnetic particles showed giant storage modulus reduction (~107 Pa) before and after magnetization [46], which might be associated with that the magnetic particles wound rotate or move under the magnetic fields due to the demagnetizing effect.
3 Conductive Polymer Actuators
3.1 Electro-Responsive Conductive Polymers
Conductive polymers (CP), such as polypyrrole, polythiophene, polyaniline, and their derivatives, show dimensional changes resulting from electrochemical doping, characterized by transportation of solvated ions between the interior of the polymer matrix and the surrounding electrolyte solution, electrostatic repulsion, and/or structural distortion through oxidation of π-conjugated polymers (Fig. 1.4) [3, 4, 6, 9, 10]. When the dopant ions are too large to dedope from the polymer matrix, the reduction of conductive polymers results in an expansion due to the intercalation of small cations from the electrolyte solution into the polymer matrix to compensate their charges.

Electrochemical volume changes of polypyrrole film based on reversible doping and dedoping
In 1990 Baughman first evaluated CPs as electromechanical actuators for the direct conversion of electrical energy to mechanical energy, in which large dimensional changes upon electrochemical doping and dedoping provided the mechanical response for proposed extensional and fibrous actuators, fluid flow controlling devices using unimorph or bimorph actuators, micromechanical tweezers with paired bimorph actuators, and Bourdon tube actuators [3]. Otero [41], Pei, and Inganäs [39, 40] demonstrated that bilayers consisting of an electro-active conjugated polymer such as polypyrrole and non-conductive flexible film exhibited bending in an electrolyte solution due to the reversible volume changes caused by doping and dedoping of the polypyrrole layer. Kaneto and MacDiarmid fabricated polyaniline actuators driven by proton-mediated redox reaction between two states of leuco-emeraldine salt and emeraldine salt. They demonstrated that ‘backbone-type’ actuator responded to the frequency of higher than 44 Hz, while ‘shell-type’ actuator operated in air [35, 36].
Smela and coworkers fabricated polypyrrole micro-actuators utilizing a micro-electro-mechanical system (MEMS) technique. The micro-cubes 300 μm on a side with hinges made of micro-actuators based on polypyrrole-gold bilayers showed rapid opening-closing within 1 s [34]. Furthermore, micro-robotic arms with the polypyrrole-gold bilayers succeeded in manipulating a glass bead with 100 μm in diameter.
Kaneto et al. reported that electrochemically synthesized polypyrrole films showed high strain and stress of 12.4 % and 22 MPa, respectively, which was applied to diaphragm pumps and tactile displays [38, 42]. The speed of contraction (13.8 %/s) [44] is slower compared to a real muscle (300 %/s) because diffusion of dopant ions in the conductive polymer matrix is the rate-determining step. Most of the CPs exhibit dimensional changes in an electrolyte solution or in a swollen state, while a few reports have been investigated on solid-state polymers in a redox gas atmosphere or that employ polyelectrolyte gel and ionic liquid [37].
3.2 Humidity-Responsive Conductive Polymers
In 1996 Okuzaki first observed that electrochemically synthesized polypyrrole films underwent rapid bending due to water vapor sorption [32], and developed polymer motors, capable of transducing chemical free energy change of sorption directly into continuous rotation [12]. Furthermore, films made of polypyrrole [29, 33] and poly(3,4-ethylenedioxythiophene)/poly(4-styrenesulfonate) (PEDOT/PSS) [30] underwent contraction in air under application of an electric field, which was explained by desorption of water vapor caused by Joule heating. The contractile strain and stress generated in the PEDOT/PSS films attained 2.5 % and 17 MPa at 50 %RH, respectively, where work capacity was 174 kJ/m3. Recently, Ma and Langer (MIT) developed humidity-responsive polymer films made of polypyrrole as a rigid matrix and polyol-borate as a dynamic network, which exhibited rapid and continuous locomotion due to the sorption of water vapor [31]. A film generator assembled with a piezoelectric element outputs alternating electricity at ~0.3 Hz, with a peak voltage of ~1.0 V.
4 Elastomer Actuators
4.1 Electro-Responsive Elastomers
Dielectric elastomers (DEs) are voltage-responsive polymers, in which high efficiency and durability are expected because of a low electric current suppressing from electrochemical degradation and thermal decomposition. Hirai et al. investigated electrostrictive properties of polyurethane elastomers with various components in hard and soft segments [25]. When an electric field was applied through both electrodes, the polyurethane elastomer contracted, where the strain was proportional to the square of the electric field in a range of ±200 V/m. The DE actuators utilizing silicone or acrylic rubbers with carbon or silver grease as compliant electrodes were reported by Pelrine et al. (SRI International) [22–24], where a large deformation of the DE (>100 %) under an electric field could be explained by the Maxwell stress (Fig. 1.5). Although the DE actuators have advantages such as simple structure and a variety of elastomeric materials, they have drawbacks such as high driving voltages (>1,000 V), few flexible and stretchable electrodes compliant to the large deformation of the DE actuators, and prestrains applied prior to operate the DE actuators. Aimed at decreasing the driving voltage and/or increase the electrostriction of the DE actuators, composites with inorganic fillers having higher dielectric constants and blends with plasticizers to lower Young’s modulus are commonly investigated [11].

Electro-responsive dimensional changes of dielectric elastomer caused by Maxwell stress
Zhang et al. reported high and fast strains of up to 4 % within an electric field of 150 MV/m achieved by electrostriction in an electron-irradiated poly(vinylidene fluoride-trifluoroethylene) copolymer exhibiting typical relaxor ferroelectric behavior [26]. The expanding and contracting of polar regions under an electric fields, coupled with a large difference in the lattice strain between the polar and nonpolar phases, generate an ultra high strain response. On the other hand, Lehmann and coworkers developed ferroelectric liquid crystalline elastomers (FLCEs) [27, 28]. Ultrathin (<100 nm) FLCE films exhibit 4 % strain at only 1.5 MV/m, which is obtained by combing the properties of ferroelectric liquid crystals with those of a polymer network.
4.2 Photo-Responsive Elastomers
Ikeda et al. demonstrated that liquid crystalline films, prepared by thermal polymerization of liquid crystal monomer and diacrylate crosslinker both of which had azobenzene moieties, were precisely bent along the any chosen direction by using linearly polarized light [20]. The mechanism is based on the microscopic changes in size and ordering in the liquid crystalline domains caused by trans–cis isomerization of the azobenzene moieties aligned along the direction of light polarization. Furthermore, Yamada and Mamiya et al. fabricated a light-driven plastic motor using liquid crystalline elastomers where the light energy is converted directly into mechanical rotation [21].
5 Carbon Nanotube Actuators
In 1999 Baughman and coworkers reported novel electeromechanical actuators based on sheets of single-walled carbon nanotubes (CNTs), the mechanism of which was based on the quantum chemical-based expansion due to electrochemical double-layer charging [17]. The CNT actuator shows the strain and stress of >0.2 % and 0.75 MPa, respectively, for more than 140,000 cycles between ±0.5 V at 1 Hz and still works at >1 kHz. Aimed at improving electrically powered artificial muscles, CNT aerogel actuators, having giant elongations (220 %) and elongation rate (3.7 × 104 % s−1) at 5 kV, are developed operating at temperatures from 80 to 1,900 K [18]. The mechanism of the CNT aerogel actuator is associated with the giant Poisson’s ratios (~15), where ballooning in the width direction is due to periodic corrugation in the same direction during nanotube sheet cycling. Recently, guest-filled, twist-spun CNT yarns are developed as electrolyte-free muscles that provide fast, high-force, large-stroke torsional and tensile actuation [19]. More than 106 torsional and tensile actuation cycles are demonstrated, wherein a muscle spins a rotator at an average speed of 11,500 rpm or delivers 3 % tensile contraction at 1,200 cycles/min that can be powered by not only heat, electric field, and light but also absorption of hydrogen.
6 Bio-Actuators
One of the promising candidates of future materials for soft actuator is bio-actuators. Montemagno et al. fabricated bio-actuators consisting of an engineered substrate, an F1-adenosine triphosphate synthase (F1-ATPase) biomolecular motor, and fabricated nanopropellers [15]. It was found that rotation of the nanopropellers was initiated with 2 mM adenosine triphosphate (ATP). Kakugo et al. developed an ATP fueled bio-actuator, namely ‘gel machines’, constructed from chemically crosslinked actins and myosins [13]. The chemically crosslinked actin filaments (F-actin) move along a chemically crosslinked myosin fibrous gel with a velocity as high as that of native F-actin, by coupling to ATP hydrolysis.
Morishima and Kitamori et al. proposed a concept to use intrinsic cellular mechanical functions where cultured cardiomyocytes can be used in microchip prototype devices as intrinsically pulsatile microactuators converting biochemical energy into mechanical energy to drive both solid microstructures and fluid in a microchip [16]. Xi and Montemagno fabricated novel bio-actuators through self-assembly of muscle cells into bundles on MEMS devices [14]. A microdevice had two ‘legs’ extending from the body and walked at the maximum speed of 38 μm/s by repeated bending and stretching synchronized with pulsating motion of the bundles of muscle cells self-assembled on the beam of the microdevice.
References
Katchalsky A, Zwick M (1955) Mechanochemistry and ion exchange. J Polym Sci 16:221–234
Osada Y (1987) Conversion of chemical into mechanical energy by synthetic polymers (chemomechanical systems). In: Olive S, Henrici-Olive G (eds) Advance in Polymer Science, 82. Springer, Berlin/Heiderberg, pp 1–46
Baughman RH, Shacklette LW, Elsenbaumer RL, Plichta E, Becht C (1990) Conducting polymer electromechanical actuators. In: Bredas JL, Chance RR (eds) Conjugated polymeric materials: opportunities in electronics, optoelectronics, and molecular electronics. Kluwer Academic, The Netherlands, pp 559–582
Baughman RH, Shacklette LW, Elsenbaumer RL, Plichta EJ, Becht C (1991) Micro electromechanical actuators based on conducting polymers. In: Lazarev PI (ed) Molecular electronics. Kluwer Academic, The Netherlands, pp 267–289
DeRossi D, Kajiwara K, Osada Y, Yamauchi A (eds) (1991) Polymer gels: fundamentals and biomedical applications. Plenum, New York/London
Otero TF, Rodríguez J (1993) Electrochemomechanical and electrochemopositioning devices: artificial muscles. In: Aldissi M (ed) Intrinsically conducting polymers: an emerging technology. Kluwer Academic, The Netherlands, pp 179–190
Osada Y, Gong JP (1998) Soft and wet materials: polymer gels. Adv Mater 10:827–836
Bar-Cohen Y (ed) (2001) Electroactive polymer (EAP) actuators as artificial muscles, reality, potential and challenges. SPIE, Bellingham
Smela E (2003) Conjugated polymer actuators for biomedical applications. Adv Mater 15:481–494
Madden JDW, Vandesteeg NA, Anquetil PA, Madden PGA, Takshi A, Pytel RZ, Lafontaine SR, Wieringa PA, Hunter IW (2004) Artificial muscle technology: physical principles and naval prospects. IEEE J Ocean Eng 29:706–728
Brochu P, Pei Q (2010) Advances in dielectric elastomers for actuators and artificial muscles. Macromol Rapid Commun 31:10–36
Okuzaki H, Kuwabara T, Funasaka K, Saido T (2013) Humidity-sensitive polypyrrole films for electro-active polymer actuators. Adv Funct Mater 23:4400–4407
Kakugo A, Sugimoto S, Gong JP, Osada Y (2002) Gel machines constructed from chemically cross-linked actins and myosins. Adv Mater 14:1124–1126
Xi J, Schmidt JJ, Montemagno CD (2005) Self-assembled microdevices driven by muscle. Nat Mater 4:180–184
Soong RK, Bachand GD, Neves HP, Olkhovets AG, Craighead HG, Montemagno CD (2000) Powering an inorganic nanodevice with a biomolecular motor. Science 290:1555–1558
Morishima K, Tanaka Y, Sato K, Ebara M, Shimizu T, Yamato M, Kikuchi A, Okano T, Kitamori T (2003) Bio actuated microsystem using cultured cardiomyocytes. In: Proceedings of the micro total analysis systems. Squaw Valley, CA, USA, pp 1125–1128
Baughman RH, Cui C, Zakhidov AA, Iqbal Z, Barisci JN, Spinks GM, Wallace GG, Mazzoldi A, DeRossi D, Rinzler AG, Jaschinski O, Roth S, Kertesz M (1999) Carbon nanotube actuators. Science 284:1340–1344
Aliev AA, Oh J, Kozlov E, Kunznetsov AA, Fang S, Fonseca AF, Ovalle R, Lima MD, Haque H, Gartstein YN, Zhang M, Zakhidov AA, Baughman RH (2009) Giant-stroke, superelastic carbon nanotube aerogel muscles. Science 323:1575–1578
Lima MD, Li N, Andrade MJ, Fang S, Oh J, Spinks GM, Kozlov ME, Haines CS, Suh D, Foroughi J, Kim J, Chen Y, Ware T, Shin MK, Machado LD, Fonseca AF, Madden JDW, Voit WE, Galvao DS, Baughman RH (2012) Electrically, chemically, and potonically powered torsional and tensile actuation of hybrid carbon nanotube yarn muscles. Science 338:928–932
Yu Y, Nakano M, Ikeda T (2003) Directed bending of a polymer film by light. Nature 425:145
Yamada M, Kondo M, Mamiya J, Yu Y, Kinoshita M, Barrett CJ, Ikeda T (2008) Photomobile polymer materials: towards light-driven plastic motors. Angew Chem Int Ed 47:4986–4988
Pelrine RE, Kornbluh RD, Joseph JP (1998) Electrostriction of polymer dielectrics with compliant electrodes as a means of actuation. Sens Actuators A 64:7–85
Pelrine R, Kornbluh R, Pei Q, Joseph J (2000) High-speed electrically actuated elastomers with strain greater than 100 %. Science 287:836–839
Pelrine R, Kornbluh R, Kofod G (2000) High-strain actuator materials based on dielectric elastomers. Adv Mater 12:1223–1225
Hirai T, Sadatoh H, Ueda T, Kasazaki T, Kurita Y, Hirai M, Hayashi S (1996) Polyurethane-elastomer-actuator. Die Angew Makromol Chem 240:221–229
Zhang QM, Bharti V, Zhao X (1998) Giant electrostriction and relaxor ferroelectric behavior in electron-irradiated poly(vinylidene fluoride-trifluoroethylene) copolymer. Science 280:2101–2104
Lehmann W, Hartmann L, Kremer F, Stein P, Finkelmann H (1999) Direct and inverse electromechanical effect in ferroelectric liquid crystalline elastomers. J Appl Phys 86:1647–1652
Lehmann W, Skupin H, Tolksdorf C, Gebhard E, Zentel R, Kruger P, Losche M, Kremer F (2001) Giant lateral electrostriction in ferroelectric liquid-crystalline elastomers. Nature 410:447–450
Okuzaki H, Kunugi T (1998) Electrically induced contraction of polypyrrole film in ambient air. J Polym Sci Polym Phys 36:1591–1594
Okuzaki H, Suzuki H, Ito T (2009) Electromechanical properties of poly(3,4-ethylenedioxythiophene)/poly(4-styrene sulfonate) films. J Phys Chem B 113:11378–11383
Ma M, Guo L, Anderson DG, Langer R (2013) Bio-inspired polymer composite actuator and generator driven by water gradients. Science 339:186–189
Okuzaki H, Kunugi T (1996) Adsorption-induced bending of polypyrrole films and its application to a chemomechanical rotor. J Polym Sci Polym Phys 34:1747–1749
Okuzaki H, Funasaka K (2000) Electromechanical properties of a humido-sensitive conducting polymer film. Macromolecules 33:8307–8311
Smela E, Inganäs O, Lundström I (1995) Controlled folding of micrometer-sized structures. Science 268:735–1738
Kaneto K, Kaneko M, Min Y, MacDiarmid AG (1995) “Artificial muscles”: electrochemical actuators using polyaniline films. Synth Met 71:2211–2212
Takashima W, Kaneko M, Kaneto K, MacDiarmid AG (1995) The electrochemical actuator using electrochemically-deposited poly-aniline film. Synth Met 71:2265–2266
Lu W, Fadeev AG, Qi B, Smela E, Mattes BR, Geoffrey JD, Spinks M, Mazurkiewicz J, Zhou D, Wallace GG, MacFarlane DR, Forsyth SA, Forsyth M (2002) Use of ionic liquids for π-conjugated polymer electrochemical devices. Science 297:983–987
Hara S, Zama T, Takashima W, Kaneto K (2004) TFSI-doped polypyrrole actuator with 26 % strain. J Mater Chem 14:1516–1517
Pei Q, Inganäs O (1992) Electrochemical application of the bending beam method. 1. Mass transport and volume changes in polypyrrole during redox. J Phys Chem 96:10507–10514
Pei Q, Inganäs O (1992) Conjugated polymers and the bending cantilever method: electrical muscles and smart devices. Adv Mater 4:277–278
Otero TF, Angulo E, Rodriguez J, Santamaria C (1992) Electrochemomechanical properties from a bilayer: polypyrrole/non-conducting and flexible material - artificial muscle. J Electroanal Chem 341:369–375
Hara S, Zama T, Sewa S, Takashima W, Kaneto K (2003) Highly stretchable and powerful polypyrrole linear actuators. Chem Lett 32:576–577
Spinks GM, Mottaghitalab V, Bahrami-Samani M, Whitten PG, Wallace GG (2006) Carbon-nanotube-reinforced polyaniline fibers for high-strength artificial muscles. Adv Mater 18:637–640
Zama T, Tanaka N, Takashima W, Kaneto K (2006) Fast and large stretching bis(trifluoromethanesulfonyl)imide-doped polypyrrole actuators and their applications to small devices. Polym J 38:669–677
Hirai T (1995) Actuator materials from polymer gels. Polymer gels responding to electric and magnetic field. J Mater Sci Soc Jpn 32:59–63
Mitsumata T, Nagata A, Sakai K, Takimoto J (2005) Giant complex modulus reduction of κ-carrageenan magnetic gels. Macromol Rapid Commun 26:1538–1541
Zrinyi M, Barsi L, Buki A (1996) Deformation of ferrogels induced by nonuniform magnetic fields. J Chem Phys 104:8750–8756
Agolini F, Gay FP (1970) Synthesis and properties of azoaromatic polymers. Macromolecules 3:349–351
Smets G, De Blauwe F (1974) Chemical reactions in solid polymeric systems. Photomechanical phenomena. Pure Appl Chem 39:225–238
Aviram A (1978) Mechanophotochemistry. Macromolecules 11:1275–1280
Irie M, Kunwatchakun D (1986) Photoresponsive polymers. 8 reversible photostimulated dilation of polyacrylamide gels having triphenylmethane leuco derivatives. Macromolecules 19:2476–2480
Suzuki A, Tanaka T (1990) Phase transition in polymer gels induced by visible light. Nature 346:345–347
Juodkazis S, Mukai N, Wakaki R, Yamaguchi A, Matsuo S, Misawa H (2000) Reversible phase transitions in polymer gels induced by ratiation forces. Nature 408:178–181
Hamlen RP, Kent CE, Shafer SN (1965) Electolytically activated contractile polymer. Nature 206:1149–1150
Yannas IV, Grodzinski AJ (1973) Electromechanical energy conversion with collagen fibers in an aqueous medium. J Mechanochem Cell Mobilily 2:113–125
Grodzinski AJ, Shoenfeld NA (1977) Tensile forces induced in collagen by means of electromechanochemical transductive coupling. Polymer 18:435–443
Osada Y, Hasebe M (1985) Electrically activated mechanochemical devices using polyelectrolyte gels. Chem Lett 14:1285–1288
DeRossi D, Parrini P, Chiarelli P, Buzzigoli G (1985) Electrically induced contractile phenomena in charged polymer networks: preliminary study on the feasibility of musclelike structures. Trans Am Soc Artif Intern Organs 31:60–65
Osada Y, Okuzaki H, Hori H (1992) A polymer gel with electrically driven motility. Nature 355:242–244
Oguro K, Kawami Y, Takenaka H (1992) Bending of an ion-conducting polymer film-electrode composite by an electric stimulus at low voltage. J Micromachine Soc 5:27–30
Shiga T, Hirose Y, Okada A, Kurauchi T (1992) Bending of poly(vinyl alcohol)-poly(sodium acrylate) composite hydrogel in electric fields. J Appl Polym Sci 44:249–253
Hirai T, Nemoto H, Hirai M, Hayashi S (1994) Electrostriction of highly swollen polymer gel: possible application for gel actuator. J Appl Polym Sci 53:79–84
Kishi R, Suzuki Y, Ichijo H, Hirasa O (1994) Electrical deformation of thermotropic liquid-crystalline polymer gels. Chem Lett 23:2257–2260
Asaka K, Oguro K, Nishimura Y, Mizuhara M, Takenaka H (1995) Bending of polyelectrolyte membrane-platinum composites by electric stimuli I. Response characteristics to various waveforms. Polym J 27:436–440
Fukushima T, Asaka K, Kosaka A, Aida T (2005) Fully plastic actuator through layer-by-layer casting with ionic-liquid-based bucky gel. Angew Chem Int Ed 44:2410–2413
Hirai T, Ogiwara T, Fujii K, Ueki T, Kinoshita K, Takasaki M (2009) Electrically active artificial pupli showing amoeba-like pseudopodial deformation. Adv Mater 21:2886–2888
Mukai K, Asaka K, Sugino T, Kiyohara K, Takeuchi I, Terasawa N, Futaba DN, Hata K, Fukushima T, Aida T (2009) Highly conductive sheets from millimeter-long single-walled carbon nanotubes and ionic liquids: application to fast-moving, low-voltage electromechanical actuators operable in air. Adv Mater 21:1582–1585
Tanaka T, Nishio I, Sun ST, Nishio SU (1982) Collapse of gels in an electric field. Science 218:467–469
DeRossi D, Chiarelli P, Buzzigoli G, Domenichi C, Lazzeri L (1986) Contractile behavior of electrically activated mechanochemical polymer actuators. Trans Am Soc Artif Intern Organs 32:157–162
Shiga T, Kurauchi T (1990) Deformation of polyelectrolyte gels under the influence of electric field. J Appl Polym Sci 39:2305–2320
Shiga T, Hirose Y, Okada A, Kurauchi T (1993) Bending of ionic polymer gel caused by swelling under sinusoidally varying electric fields. J Appl Polym Sci 47:113–119
Hirai T, Nemoto H, Suzuki T, Hayashi S, Hirai M (1993) Actuation of poly(vinyl alcohol) gel by electric field. J Intell Mater Syst Struct 4:277–279
Tanaka T, Ishiwata S, Ishimoto C (1977) Critical behavior of density fluctuations in gels. Phys Rev Lett 38:771–774
Tanaka T, Fillmore DJ, Sun ST, Nishio I, Swislow G, Shah A (1980) Phase transitions in ionic gels. Phys Rev Lett 45:1636–1639
Tanaka T, Sato E, Hirokawa Y, Hirotsu S, Peetermans J (1985) Critical kinetics of volume phase transition of gels. Phys Rev Lett 55:2455–2458
Suzuki M, Hirasa O (1993) An approach to artificial muscle using polymer gels formed by micro-phase separation. Adv Polym Sci 110:242–261
Osada Y, Saito Y (1975) Mechanochemical energy conversion in a polymer membrane by thermo-reversible polymer-polymer interactions. Makromolekulare Chem 176:2761–2764
Tanaka T (1978) Collapse of gels and the criticalendpoint. Phys Rev Lett 40:820–823
Yoshida R, Uchida K, Kaneko Y, Sakai K, Kikuchi A, Sakurai Y, Okano T (1995) Comb-type grafted hydrogels with rapid deswelling response to temperature changes. Nature 374:240–242
Osada Y, Matsuda A (1995) Shape memory in hydrogels. Nature 376:219
Yoshida R, Takahashi T, Yamaguchi T, Ichijo H (1996) Self-oscillating gel. J Am Chem Soc 118:5134–5135
Tanaka T, Fillmore DJ (1979) Kinetics of swelling of gels. J Chem Phys 70:1214–1218
Steinberg IZ, Oplatka A, Katchalsky A (1966) Mechanochemical engines. Nature 210:568–571
Sussman MV, Katchalsky A (1970) Mechanochemical turbine: a new power cycle. Science 167:45–47
Sussman MV (1975) Mechanochemical availability. Nature 256:195–198
Kuhn W, Hargitay B, Katchalsky A, Eisenberg H (1950) Reversible dilation and contraction by changing the stage of ionization of high-polymer acid networks. Nature 165:514–516
Katchalsky A (1949) Rapid swelling and deswelling of reversible gels of polymeric acids by ionization. Experimentia 5:319–320
Kuhn W (1949) Reversible dehnung und kontraktion bei anderung der ionisation eines netzwerks polyvalenter fadenmolekulionen. Experimentia 5:318–319
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer Japan
About this chapter
Cite this chapter
Okuzaki, H. (2014). Progress and Current Status of Materials and Properties of Soft Actuators. In: Asaka, K., Okuzaki, H. (eds) Soft Actuators. Springer, Tokyo. https://doi.org/10.1007/978-4-431-54767-9_1
Download citation
DOI: https://doi.org/10.1007/978-4-431-54767-9_1
Published:
Publisher Name: Springer, Tokyo
Print ISBN: 978-4-431-54766-2
Online ISBN: 978-4-431-54767-9
eBook Packages: Chemistry and Materials ScienceChemistry and Material Science (R0)