
Abstract
In this paper, we consider cognitive relay networks with energy harvesting and cooperative communications, the secondary user (SU) can get energy and idle spectrum by helping primary user (PU) to transmit its information for each slot. In such a scenario, we propose an optimal cooperation strategy in order to maximize the overall networks’ throughput. We compare the results of the optimal cooperation strategy with the other collaboration strategy. The results show that the optimal cooperation strategy is always superior to the other collaboration strategy.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
With the growing environmental concerns and the increasing demand of wireless services, energy efficiency and spectral efficiency are two essential design metrics in wireless communications [1]. Recently, it has been shown that the wireless information and power transfer technology could make one device harvest energy from the environment RF signal, and process the information at the same time [2]. On the other hand, cognitive radio is a promising way to improve spectrum utilization by allowing spectrum sharing. Therefore, combining cognitive radio networks with energy harvesting offers an efficient way in terms of both energy and spectrum [3, 4].
Cognitive radio was proposed to improve the spectrum utilization by allowing SUs to opportunistically exploit the spectrum unused by PUs [5, 6]. In [7], the authors investigate optimization for the cooperative spectrum sensing with an improved energy detector to minimize the total error rate (sum of the probability of false alarm and miss detection). Follow-up works extend the scenario in [7] to imperfect reporting channels [8] and SUs with multiple antennas [9], respectively. Cooperative spectrum sensing based on finite number of primary signal samples is investigated in [10, 11], where the local and global thresholds are optimized in order to minimize the total error rate. In [12–15], the authors investigate transmission policies to guarantee that the energy constrained relay could carry out simultaneously the energy harvesting and information processing in wireless cooperative systems. Our research is inspired by [16]. In [16], the authors have proposed the optimal cooperation protocol in cognitive radio system where the direct link between the PUs is available and the SU’s energy is harvested from ambient radio signal.
In this paper, we consider cognitive relay networks with one pair of primary transceivers and one pair of secondary transceivers, which operate in time-slotted mode. The secondary transmitter is powered exclusively by energy extracted from the primary transmitter’s signal. The main contributions of this paper are summarized as follows:
-
(1)
We characterize a new transactional relationship between the PU and SU. The PU provides sufficient energy and idle spectrum for the SU. In return, the SU can act as a relay node to complete PU’s transmission.
-
(2)
We formulate the problem of the SU’s achievable throughput maximization. In such a scenario, there exist energy transfer (e.g., fraction of dedicated time), cooperative transmission (e.g., allocated power for cooperative relay), and data transmission. To tackle such trade-off, we investigate the optimal cooperation strategy in cognitive relay networks, namely, the optimal action (to spend how much time on energy harvesting and to allocate how much power for cooperative relay).
-
(3)
We derive the expression of the optimal cooperation strategy and illustrate the strategy by numerical computation and simulation analysis. Our numerical results show that the optimal cooperation strategy can maximize the throughput.
The paper is organized as follows. Section 2 sets up the energy harvesting, information transfer, and cooperative communication model. The problems are formulated and analyzed in Sect. 3. Simulations are presented in Sect. 4, followed by conclusions in Sect. 5.
2 System Model
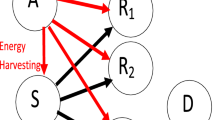
We consider cognitive relay networks with energy harvesting as shown in Fig. 1. The PU has the ownership of a licensed channel. In each timeslot, the PU has a certain amount of data stored in its buffer. Because the direct link between the PUs is not available, the PU must rely on a relay node to use the licensed channel to transmit its data. After PU’s transmission is finished, the PU turns into silence and the licensed channel is vacated. On the contrary, the SU does not have any licensed spectrum and is allowed to transmit its own data only when the licensed channel is unused by the PU in order to avoid collision with the PU. Moreover, the self-powered SU has no fixed power supplies and extracts energy exclusively via energy harvested from the PU’s radio signal. We also assume that the SU’s transmitter follows a save-then-transmit protocol. This is because practically rechargeable energy storage devices cannot charge and discharge simultaneously (which is termed energy half-duplex constraint). In each timeslot, the SU first devotes a fraction (referred to as save-ratio) of time exclusively to energy harvesting, then it uses the harvested energy for data transmission.

Cognitive relay networks with cooperation between PU and SU
In such cognitive relay networks, the PU needs a relay to transmit the data and the SU lacks energy and spectrum. Therefore, we assume that there is a transaction between the PU and SU. The SU can act as a cooperative relay to help the PU finish its certain transmission. In exchange, the PU provides ambient radio signal, which the SU can harvest energy from, and idle spectrum. After all of PU’s data is transmitted, the SU can transmit its own data on the idle channel by consuming the remaining energy. As a result, the PU and the SU can achieve a win-win. Moreover, the PU sever as a power source can make the harvested energy assured.
In order to do so, the SU must consume its harvested energy to help relay the PU’s data. This cooperation can take place in several ways depending on the cooperative protocol being used. In this paper, we assume the cooperative communication between PU and SU follows the decode-and-forward (DF) protocol, which is one of the commonly used protocols. In the DF protocol, the relays first decode the received signal, re-encode it, and then transmit it to the destination. Finally, the destination decodes the data.
In the proposed mode shown in Fig. 2, a timeslot is partitioned into three fractions synchronous for both PU and SU, which can be detailed as follows:

Timeslot structure of cooperation mode
-
(1)
During time interval \( \left( {0,aT} \right] \), the SU harvests energy from ambient signal. The SU’s harvested energy amounts to XaT, where X denotes the SU’s energy harvesting rate (average energy harvested in unit time).
-
(2)
During time interval \( \left( {aT,aT + t_{r} } \right] \), where the cooperative communication duration is given by
the PU and the SU cooperate with each other to complete the PU’s transmission, Q denotes the data amount of PU in each timeslot, r PS denotes signal-to-noise ratio of link between PU transmitter (source) and SU transmitter (relay), and \( \gamma_{SR} \) denotes channel-power-gain-to-noise-power ratio of link between SU transmitter (relay) and PU receiver (destination). Here, we specify that \( t_{r} \le ( 1 { - }a )T \). Because the PU must be able to complete its transmission within one timeslot. After consuming \( wt_{r2} \) of energy for cooperative relay, \( X\alpha T - wt_{r2} \) of energy remains. Following the DF protocol, the PU transmitter (as source) transmits its data to the SU transmitter (as relay) and PU receiver (as destination) in the first part of cooperation interval \( \left( {aT,aT + t_{r1} } \right] \). Then in the second part of cooperation interval \( \left( {aT + t_{r1} ,aT + t_{\text{r}} } \right] \), the SU transmitter relays the PU’s data to the PU receiver. Here, we focus on fully decoding at the SU’s transmitter (i.e., repetition-coded scheme without error).
-
(3)
During time interval \( \left( {aT + t_{r} ,T} \right] \), when PU’s transmission is completed and the licensed channel is vacated, the SU starts to transmit its own data. The PU keeps silent and of energy remains for secondary transmission. We assume that the SU must exhaust all the harvested energy in each timeslot for data transmission. While operating in cooperation mode, in addition to the save-ratio, the SU can decide how much of its harvested energy is allocated to help relay the PU’s data as well. Evidently, with more energy consumed for cooperative relay, the PU’s transmission could be completed earlier such that more opportunities could be available for secondary transmission, whereas less energy is reserved, which inevitably limits the SU’s achievable throughput.
3 Problem Formulation
In this section, problem of the SU’s achievable throughput maximization is formulated. In the proposed mode as shown in Fig. 2, the SU’s achievable throughput in each timeslot is given by
Note that the SU’s achievable throughput in (2) is normalized with 1/T, and \( \gamma_{S} \) denotes channel-power-gain-to-noise-power ratio of link between SU transceiver pair. We aim at jointly optimizing the SU’s save-ratio (a) and allocated power (w) for cooperative relay to maximize SU’s achievable throughput and the problem can be formulated as the following:
The first constraint in (3) refers to the time causality constraint which guarantees that the cooperative communication duration should not exceed the remaining time after energy harvesting. The second one refers to the energy causality constraint which guarantees that the energy consumed for cooperative relay should not exceed the SU’s harvested energy. We ensure the PU’s transmission by the two constraints. The one can guarantee the transmission time and the other one can satisfy the transmission power. We aim at jointly optimizing the SU’s save-ratio (a) and allocated power (w) for cooperative relay to maximize SU’s achievable throughput in (2). The analysis of (3) did turn up that it is a typical convex optimization problem [17], and its Lagrange Equation is given by
We first investigate the convexity of the optimization problem in (2) and then derive the optimal by solving the equation system of Karush–Kuhn–Tucker (KKT) optimality conditions. Thus, the global optimum of (3) exists and the optimal can be derived by comparing all the candidate KKT points.
The KKT optimality condition of (4) is given by
Therefore, we eliminate the complementary slackness conditions and dual variables concerning these cases.
-
(1)
Candidate KKT point 1: \( \lambda_{1} = \lambda_{2} = 0 \): Deriving the optimal and while is equivalent to solving the following equation system:
$$ \left\{ \begin{aligned} \frac{\partial R}{\partial a} = 0 \hfill \\ \frac{\partial R}{\partial w} = 0 \hfill \\ \end{aligned} \right. $$(6)
The candidate KKT point (a 1, w 1) can be expressed as
where
Then the feasibility of (a 1, w 1) can be tested with the constraints in (3).
-
(2)
Candidate KKT point 2: \( \lambda_{2} = 0 \) and \( \lambda_{1} \ge 0 \): In this case, we have
$$ a_{2} = 1 - \frac{Q}{{T\log_{2} \left( {1 + r_{PS} } \right)}} - \frac{Q}{{T\log_{2} \left( {1 + w_{2} \gamma_{SR} } \right)}} $$(9) -
(3)
Candidate KKT point 3: \( \lambda_{1} = 0 \) and \( \lambda_{2} \ge 0 \) : In this case, we have
$$ a_{3} = \frac{{w_{3} Q}}{{XT\,\log_{2} \left( {1 + w_{3} \gamma_{SR} } \right)}} $$(10)
However, we tested (9) and (10) with the constraints in (2), it can be concluded that (a 2, w 2) and (a 3, w 3) are both practically infeasible. The values of R(a 2, w 2) and R(a 3, w 3) are zero, obviously they do not meet with the maximum throughput.
4 Numerical Results
In this section, we illustrate how the optimal strategy depends on the system parameters in cooperation. We respectively evaluate numerically the optimal save-ratio and allocated power for cooperative relay in the proposed mode by setting X = 150, T = 1, r PS = 15 dB, \( \gamma_{SR} \) = \( \gamma_{S} \) = 5 dB/W.
We set Q = 2, \( a \in \left[ {0,0.4} \right] \) and \( w \in \left[ {0,80} \right] \). Simulation results are shown in Fig. 3. In Fig. 3, it can be observed that: the figure of results is convex, and it exists in the peak. We first set an initial value. Then, according to the formula (3), the optimal save-ratio and the optimal allocation power are obtained by the iteration. We mark the optimal point and corresponding throughput by plus sign (+), which coincides with the peak. Therefore, the optimal cooperation strategy can be verified.

The global throughput
Optimal save-ratio in the proposed mode with different system parameters is shown in Fig. 4. In Fig. 4, we can see that the SU’s achievable throughput R decreases as PU’s data amount Q increases, and the optimal save-ratio varies with different Q. When the allocated power for cooperative relay is optimum, the throughput which the optimal save-ratio achieves is always equal or greater than the other save-ratio’s achievable throughput.

The throughput with the optimal allocated power and different save-ratio
Optimal allocated power for cooperative relay in cooperation mode with different system parameters is shown in Fig. 5. In Fig. 5, we can see that the save-ratio is optimum, the optimal allocated power’s achievable throughput is always equal or greater than the others. The difference between them increases as the PU’s data amount Q increases. The reason of the phenomenon is that the influence of the allocated power is not obvious when the value of Q is small.

The normalization throughput with the optimal save-ratio and different allocated power
5 Conclusions
In this paper, we consider cognitive relay networks with one PU and one SU and both of their transmitters operate in time-slotted mode. The SU, which has no fixed power supplies and extracts energy exclusively via energy harvested from ambient radio signal, can optionally cooperate with the PU to help PU’s complete transmission such that enough energy and idle channel can be available for its own transmission. To tackle the trade-off in energy harvesting, cooperative relay, and secondary transmission, we investigate the optimal action to maximize the SU’s achievable throughout and derive the optimal closed-form solutions with numerical analysis. Based on the analytical results, we further propose the optimal cooperation protocol (OCP) to make the optimal cooperation decision. Simulation results demonstrate the effectiveness of the proposed strategy.
References
Hu Z, Chen Z, Liu H, Shao X, Xing G (2013) System design for broadband digital radio broadcasting. IEEE Commun Mag 51(4):58–65
Varshney LR (2008) Transporting information and energy simultaneously. In: Proceedings of the IEEE ISIT
Haykin S (2005) Cognitive radio: brain-empowered wireless communications. IEEE J Sel Areas Commun 23(2):201–220
Zhou X, Zhang R, Ho CK (2012) Wireless information and power transfer: architecture design and rate-energy tradeoff. http://arxiv.org/abs/1205.0618
Ding G, Wu Q, Yao Y, Wang J, Chen Y (2013) Kernel-based learning for statistical signal processing in cognitive radio networks: theoretical foundations, example applications, and future directions. IEEE Signal Process Mag 30(4):126–136
Ding G, Wang J, Wu Q, Zhang L, Zou Y, Yao Y, Chen Y (2014) Robust spectrum sensing with crowd sensors. IEEE Trans Commun 62(9):3129–3143
Singh A, Bhatnagar MR, Mallik RK (2011) Cooperative spectrum sensing with an improved energy detector in cognitive radio network. In: Proceedings of the NCC, pp 1–5
Singh A, Bhatnagar MR, Mallik RK (2011) Optimization of cooperative spectrum sensing with an improved energy detector over imperfect reporting channels. In: Proceedings of the IEEE VTCł Fall, pp 1–5
Singh A, Bhatnagar MR, Mallik RK (2012) Cooperative spectrum sensing in multiple antenna based cognitive radio network using an improved energy detector. IEEE Commun Lett 16(1):64–67
Singh A, Bhatnagar MR, Mallik RK (2012) Threshold optimization of finite sample based cognitive radio network. In: Proceedings of the NCC, pp 1–5
Singh A, Bhatnagar M, Mallik R (2013) Threshold optimization of a finite sample-based cognitive radio network using energy detector. EURASIPJ Wirel Commun Netw 2013(1):165
Chen Z, Wang B, Xia B, Liu H (2013) Wireless information and power transfer in two-way amplify-and-forward relaying channels. http://arxiv.org/abs/1307.7447
Chen Z, Liu H, Wang W (2011) On the optimization of decode-and-forward schemes for two-way asymmetric relaying. In: Proceedings of the IEEE ICC
Liu Y, Mo J, Tao M (2013) QoS-aware transmission policies for OFDM bidirectional decode-and-forward relaying. IEEE Trans Wirel Commun 12(5):2206–2216
Lee S, Huang K, Zhang R (2012) Cognitive energy harvesting and transmission from a network perspective. In: Proceedings of the IEEE ICCS
Yin S, Zhang E, Qu Z, Yin L, Li S (2014) Optimal cooperation strategy in cognitive radio systems with energy harvesting. IEEE Trans Wirel Commun 13(9):4693–4707
Boyd S, Vandenberghe L (2004) Convex optimization. Cambridge University Press, Cambridge, pp 243–249
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Yan, K., Ren, G., Chen, J., Ding, G., Liu, H. (2016). Optimal Cooperation Strategy in Cognitive Relay Networks with Energy Harvesting. In: Liang, Q., Mu, J., Wang, W., Zhang, B. (eds) Proceedings of the 2015 International Conference on Communications, Signal Processing, and Systems. Lecture Notes in Electrical Engineering, vol 386. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-662-49831-6_10
Download citation
DOI: https://doi.org/10.1007/978-3-662-49831-6_10
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-662-49829-3
Online ISBN: 978-3-662-49831-6
eBook Packages: EngineeringEngineering (R0)