
Abstract
Based on the nonlinear model of vehicle planetary transmission, the dynamic optimization model is established. This work use a combined objective function, internal and external load sharing coefficients and peak-to-peak mesh forces of second stage planetary are taken as objectives. The structure parameters of transmission shafts are considered as design variables. Finite Element Analysis (FEA) is carried out to obtain the bending and torsional stiffness, and the maximal Von-Mises stress constraint. Innovatively, we propose and introduce the nonlinear characteristic constraint aim at increasing the reliability of optimization. The Isight-Matlab-Ansys co-simulation method is applied to build the optimization platform. Finally, the optimization moel of vehicle planetary transmission is solved by Genetic Algorithm (GA).
F2012-J02-007
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others
Keywords
1 Introduction
With the rapid development of high-speed and heavy-load vehicle transmission, the traditional static design method could not meet the design requirements of transmission, therefore, dynamic optimal design methodology is more and more prevalence.
1986, Houser [1] stated that the next step for the optimization design of gear should introduce the dynamic characteristics. In 1988, Japanese scholar Umezawa [2] provided a curve of helical gear vibration characteristics in order to design low vibration and low noise gears. In 1992, Cai [3] analyzed the static optimization of nonlinear dynamic model. The same year, Wang [4] took the dynamic performance of gear pair as objective, after optimization the dynamic load and the vibration was much smaller than the initial design in a wide range of speeds. Fonseca [5] used genetic algorithms to optimize the static transmission error, which is one of the earliest literatures that introduced genetic algorithm into the gear optimization. LUO [6] used the method of gray relation to change multi-objective optimization to a single objective optimization. Li [7] considered the bearing capacity, volume and stability of operation as objectives, then optimized the gear transmission with self adaptive genetic algorithm. Padmanabhan [8] considered the power, efficiency, volume, center distance as objectives, and then he used genetic algorithms to optimize the gear pair. Finally, the finite element analysis (FEA) was used to carry on further study of tooth bending stress. Recently, Faggioni [9] presented a global optimization method focused on gear vibration reduction by means of profile modifications. The optimization method considered different regimes and torque levels. He also pointed out that the static optimal design of the gear transmission system probability made the dynamic performance of gear transmission even worse. But the nonlinear dynamic characteristic and the bending-torsional coupled stress of shaft was not considered in previous studies.
This paper proposed a nonlinear model of vehicle planetary transmission. Based on the dynamic performance of transmission, the dynamic optimization model was built. This paper introduced the nonlinear characteristic constraint and the bending-torsional coupled Von-mises stress as constraint, innovatively. Then, the co-simulation method is used to build optimization platform. Finally, the dynamic optimization model is solved by genetic algorithm.
2 Nonlinear Model of Vehicle Planetary Transmission
Physical model of vehicle planetary transmission (Fig. 1).

Physical model of vehicle transmission
There are two forward gears and one reverse gear in this vehicle transmission. The two forward gears correspond to the first and third clutch engagement, while the reverse gear corresponding to the second clutch engagement. In this paper, we only consider the dynamic performance of first gear. As the engagement of the third clutch, the second planetary is under load while the other with no-load.
Nonlinear dynamic behavior of planetary transmission takes the backlash, time-varying mesh stiffness, installation error and tooth error into consideration [10–12]. The time-varying mesh stiffness is periodic and is expanded in Fourier series form with the gear meshing frequency ω, in order to assure the accuracy, M = 9 (Eq. (1).
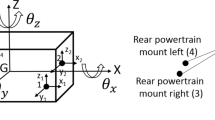
Equations (2)–(5) are the nonlinear equations of planetary, where, i = 1, 2, N = 4, j = 1, 2, 3, 4. In the equations, J are moment of inertias, R are pitch diameters, eM are eccentric distances, ω are rotational speeds, m are masses, x and y are bending displacements, θ are torsional displacements, γ and ψ are initial phase angles. α is pressure angle. The index s, r, c represent the sun, ring, carrier, planet. The index i and j represent the stage of planetary, the number of planet gear. The index x, y represent the direction of bending displacement.
The equations of motion for the sun gears are
where, Fc and Fk are damping force and bending forces of sun gear, Tc and Tk are relative torques and damping forces between nearby lumped masses. Fsipij is external mesh forces, Fripij is internal mesh forces.
The equations of motion for the carrier are
where, Fxcirj , Fycirj and Tcirj are interaction forces of 2nd carrier and 1st ring. Fxci and Fyci are bearing forces, To is block torque. Fxpij and Fypij are bearing forces of planet.
The equations of motion for the ring gears are
where, Fxri and Fyri are bearing forces of x, y direction, Tb is brake torque.
The equations of motion for the planet gear j are
For these planet gears, the inertia forces are much more complicated than the other parts due to the planet gears are attached to the carrier. The equations of other lumped mass model are not present here.
3 Optimization Model
This section describes about the objective functions, design variables and constraints of dynamic optimization model.
3.1 Objective Functions
The effect of dynamic performance caused by first stage planetary not play a crucial role for the second gear, so we take the internal and external load sharing coefficients and the peak-to-peak meshing forces of second stage planetary as objectives. The objectives are as follows.
where, \( F^{\text{m}}_{{{\text{r}}2{\text{p}}2j}} \) are the mean internal mesh forces of second stage planetary, respectively. \( F^{\text{m}}_{{{\text{r}}2{\text{p}}2j}} \) are the mean external mesh forces of second stage planetary, respectively.
where, j = 1, 2, 3, 4, represent the external peak-to-peak mesh forces of second stage planetary.
There are ten different objectives considered in this work. These objectives can be classified into two groups, f1 and f2 are load sharing coefficients, f3 to f10 are peak-to-peak mesh forces. Since the parameters of each group are on different scales, these factors are to be normalized to the same scale [13]. The normalized objective function is obtained as follows:
where, COF is combined objective function. N(f k ) represent normalized objective. W k represent weight factor, all equal to 0.1. S k represent normalization factor, for load sharing coefficient S k = 1, for peak-to-peak mesh forces S k = 10,000.
3.2 Design Variables
According to the engineering design requirements, the inner diameters of shaft, the gear parameters and layout of planetary are determined. So there are nine parameters can be taken as design variables, the five outer diameters of shaft, R i , i = 1, 2, 3, 4, 5, and the layout of bearing 1, 3 and bevel gear L j , j = 1, 2, 3. The optimization model contains eight independent design variables.
3.3 Design Constraints
Basically, there are three types of constraints: the boundary constraints, the static performance constraints and the dynamic performance constraints. In order to increase the reliability of optimization result, the nonlinear characteristic constraint is proposed in this work.
3.3.1 Boundary Constraints
Boundary constraints, mainly refer to the lower bound (LB) and the upper bound (UB) of the design variables.
According to the actual parameters variation ranges, the boundary constraints are show in Table 1.
3.3.2 Static Constraints
The tooth breakage and surface failures are the most likely failures of transmission gears. To safeguard the tooth against the breakage and surface failure, the gear should have adequate bending strength and contact strength. The bending fatigue stresses and crushing fatigue stresses of external meshing are considered.
The bending stress (σF) and contact stress (σH) are adopted from [14]
where, Ft is transmitted tangential load at operating pitch diameter, b is contacting face width, d1 is pinion pitch diameter, u is gear teeth/pinion teeth, mn is normal module. The other parameters are mostly correction factors.
The allowable value of bending stress [σF] and contact stress [σH] are 525 and 1650 MPa, respectively.
3.3.3 Dynamic Constraints
Bearing is one of the most important parts in vehicle transmission. In order to avoid the fatigue failure of the bearing, the bearing forces should be lesser then the allowable value.
where, F i is maximal bearing force, [F i ] is allowable value of bearing. The allowable value of three bearings are 59500, 82500 and 58500 N, respectively.
For bending-torsional coupled transmission shaft, the maximum Von-Mises stress should be considered. FEA method is used to model the shaft at different parameters and calculate the dynamic Von-Mises stress at different time steps. Because of the difficulty to determine all the forces acting on the shaft, the displacements of every lumped mass on shaft are extracted as boundary conditions of FEA.
where, σmax is maximal dynamic stress, [σ] is allowable value equal to 350 MPa.
3.3.4 Nonlinear Characteristic Constraint
The nonlinear dynamic model take time-varying mesh stiffness, backlash and tooth errors into consideration, so it’s inevitable to appear chaotic motion for some design variables. In order to avoid chaotic motion, we introduce the nonlinear characteristic constraints. Lyapunov exponent provides one of the most useful test for the presence of chaos [15]. As long as the largest lyapunov exponent (LEmax) is greater than 0, the system appears chaotic motion. It is reasonable that the largest lyapunov exponent is taken as nonlinear characteristic constraint. Here, the method of computing the LEmax proposed by Benettin is used [16].
4 Results and Discussion
The nonlinear dynamic equations of vehicle transmission was solved using the fourth order Runge–Kutta method with input torque and speed of vehicle transmission are 2,000 Nm and 7,000 r/min, respectively. The time series data corresponding to the first 5,000 revolutions of the two gears were deliberately excluded from the dynamic analysis to ensure that the analyzed data related to steady-state conditions [17]. Isight-Matlab-Ansys co-simulation is used to build optimization platform. The optimization flow shows in Fig. 2.

Optimization flow of co-simulation method
Due to non-analytic of objective functions, the traditional gradient-based optimization method is no longer applicable. So we use modern optimization methods—Binary Coded based Genetic Algorithm (GA) with one-point crossover to optimize the system [18]. The values of Genetic Algorithm operators are shown in Table 2. There are 200 individuals participate in iteration. The Isight automatic determines the parameters of design variables. In order to reduced the mapping error of binary encoding and decoding, the size of gene is set as 20.
The optimal result occurs at step 140. The optimum values of objective function and design variables corresponding to the minimum COF value are shown in Tables 3 and 4. From Table 3, we can conclude that the optimal parameter of L2, L3, R1, R2, R5 are remain the same, while the L1, R3, R4 are reduced. Figure 3 shows the finite element model of shaft with initial parameters and optimal parameters.

Finite element model of transmission shaft, a Initial design. b Optimal design
From Fig. 4, we can obtain that all the objectives of optimal design are lesser then the initial design more or less exceptt the external peak-to-peak meshing forces f3, for the sake of naturally conflicting of multi-objective optimization problems (MOP). The reduction rates of peak-to-peak mesh forces shows in the forth column of Table 4. It can be seen that the objective f5 reduces about 10 %, while f3 increases about 2 %. The two load sharing coefficients objectives are both less than the initial values about 0.0004, which means that the dynamic characteristic of sharing caused by dynamic load appears to be easing.

Histogram of peak-to-peak mesh forces before and after optimization
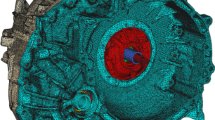
Figure 5 shows that as the iteration step goes the design parameters generate by GA seems more and more suitable to satisfy the Von-Mises stress constraint. Dynamic stress analysis was conducted for the transmission shaft before and after design through FEA. Through Fig. 6 we can reach that the Von-mises stress of shaft clearly reduced lower than 300 Mpa at some peaks after optimization. The maximal Von-mises stress of shaft before and after optimizations are 335 and 333 MPa, which are both less than the allowable value 350 MPa. From Fig. 7, we can realize that the maximal Von-mises stress on the shaft appears between the two sun gears.

Maxmal Von-mises stress of shaft

Dynamic stress of initial and optimal design within the last 2,000 steps

Von-mises stress of shaft at last calculation step, a Initial design. b Optimal design
Figure 8 shows there are only 21 group of parameters lead to the chaotic motion of transmission, while the others including the optimal design appear non-chaotic motion. With the nonlinear characteristic constraint, the chaotic solutions have been effectively removed. The largest Lyapunov exponent of transmission under initial design and optimal design are −8.1E−5 and −9.0e−5 respectively, which means dynamic motion of initial and optimal design are both non-chaotic.

Largest Lyapunov exponent during optimization
5 Conclusion
A dynamic optimization model, based on the nonlinear dynamic of vehicle planetary transmission, has been built in order to improve the dynamic performance. Parameters of shaft were considered as design variables. In order to improve the reliability of transmission shaft, the finite element method (FEA) is used calculated the maximal dynamic stress constraint. The bending and torsional displacements of lumped masses on shaft were extracted as boundary conditions of FEA. Innovatively, by introducing the nonlinear characteristic constraint, chaos solutions has been effectively removed.
Isight-Matlab-Ansys co-simulation method was used to build the optimization platform. Binary coding Genetic Algorithm was utilized in this work. The optimization model and method proposed in this work are both suitable for the other vehicle transmission.
After optimization, most of the objectives of optimal design were lesser then the initial design more or less. The largest Lyapunov exponent of optimal design transmission was less than zero, which means the dynamic performance of vehicle transmission can predict. The dynamic stress of shaft clearly reduced at some peaks before and after optimization, but the maximal stress was not significantly reduces. Finally, the optimization results not only avoid the chaotic behaviour, but also improve the dynamic performance of vehicle transmission and extending the system life.
References
Tavakoli MS, Houser DR (1986) Optimum profile modifications for the minimization of static transmission errors of spur gears. J Mech Transmissions Autom Des 108:86–95
Umezawa K (1988) Estimation of vibration of power transmission helical gears by means of performance diagrams on vibration. JSME Int J 31:598–605
Cai Y, Hayashi T (1992) The optimum modification of tooth profile for a pair of spur gears to make its rotational vibration equal to zero. ASME proceedings of power transmission and gearing conference (43–2):453–460
Wang T (1992) An optimal design for gears with dynamic performance as an objective function. J Huazhou University (20–5):13–18
Fonseca DJ (2005) A genetic algorithm approach to minimize transmission error of automotive spur gears sets. Appl Artif Intell 19–2:53–179
Luo Y, Liao D (2009) High dimensional multi-objective grey optimization of planetary gears type AA with hybrid discrete variables. International conference on computational intelligence and natural computing
Li R, Chang T, Wang J, Wei X (2008) Multi-objective optimization design of gear reducer based on adaptive genetic algorithm. IEEE 229–233
Padmanabhan S, Ganesan S, Chandrasekaran M (2010) Gear pair design optimization by genetic algorithm and FEA. IEEE 301–307
Faggioni M (2011) Dynamic optimization of spur gears. Mech Mach Theo 46:544–557
Guo Y, Parker RG (2010) Dynamic modeling and analysis of a spur planetary gear involving tooth wedging and bearing clearance nonlinearity. Eur J Mech A/Solids 29:1022e–1033
Kahraman A, Singh R (1991) Interactions between time-varying mesh stiffness and clearance non-linearities in a geared system. J Sound Vib 146:135–156
KahramanA, Blankenship GW (1994) Planet mesh phasing in epicyclic gear sets. International gearing conference Newcastle 99–104
Saravanan R, Sachithanandam M (2001) Genetic algorithm for multivariable surface grinding process optimization using a multi-objective function model. Int J Adv Manuf Technol 17:330–338
Dudley DW (1983) Handbook of practical gear design, McGraw-Hill Book Co, New York
Wolf A, Swift JB, Swinney HL, Vastano JA (1985) Determining Lyapunov exponents from a time series. Physica 16D:285–331
Benettin G, Galgani L, Giorgilli A, Strelcyn J-M (1980) Lyapunov characteristic exponents for smooth dynamical systems and for Hamiltonian systems; a method for computing all of them. Meccanica 15:9
Cai-Wan Chang-Jian, Chang Shiuh-Ming (2011) Bifurcation and chaos analysis of spur gear pair with and without nonlinear suspension. Nonlinear Anal: Real World App 12:979–989
Deb K (2001) Multi-objective optimization using evolutionary algorithms. Wiley, Chichester
Acknowledgments
This work was partially supported by Natural Science Foundation of China (50905018,51075033). The authors would like to express gratitude to its financial support.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Xiang, C., Wang, C., Liu, H., Cai, Z. (2013). Dynamic Optimization of Vehicle Planetary Transmission Based on GA and FEA. In: Proceedings of the FISITA 2012 World Automotive Congress. Lecture Notes in Electrical Engineering, vol 201. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-33832-8_10
Download citation
DOI: https://doi.org/10.1007/978-3-642-33832-8_10
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-33831-1
Online ISBN: 978-3-642-33832-8
eBook Packages: EngineeringEngineering (R0)