
Abstract
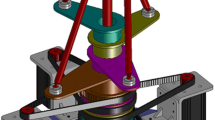
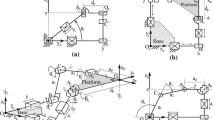
A new 2-UPS-PU parallel manipulator with one translational and two rotational degrees of freedom (DOF) has been proposed in this paper, which has the advantages of high rotational capability and high load carrying capacity, etc. The mobility of the robot is analyzed. The inverse and forward kinematics problems are solved. The velocity and force Jacobian of the new parallel manipulator are given. An effective method for computing this manipulator’s workspace is proposed. The workspace is represented in an ingenious selected cylindrical coordinate system. An optimal dimensional synthesis method is presented to optimize all the parameters of this manipulator for a prescribed workspace with the excellent mechanical performance.
Access provided by Autonomous University of Puebla. Download to read the full chapter text
Chapter PDF
Similar content being viewed by others

References
Huang, Z., Kong, L.F., Fang, Y.F.: Theory on Parallel Robotics and Control. Machinery Industry Press, Beijing (1997) (in Chinese)
Merlet, J.-P.: Still a long way to go on the road for parallel mechanisms. In: R. ASME DETC Conference, Montréal (2002)
Huang, T., Wang, J.S., Whitehouse, D.J.: Closed form solution to the position workspace of Stewart parallel manipulators. J. Science in China, Series E: Technological Sciences 41, 394–403 (1998)
Merlet, J.-P.: Designing a parallel manipulator for a specific workspace. J. International Journal of Robotics Research 16, 545–556 (1997)
Boudreau, R., Gosselin, C.M.: The synthesis of planar parallel manipulators with a genetic algorithm. J. ASME J. Mech. 121, 533–537 (1999)
Kosinska, A., Galicki, M., Kedzior, K.: Design and optimization of parameters of Delta-4 parallel manipulator for a given workspace. J. Robot. Syst. 20, 539–548 (2003)
Snyman, J.A., Hay, A.M.: Optimal synthesis for a continuous prescribed dexterity interval of 3-DOF parallel planar manipulator for different prescribed output workspaces. In: Proceeding of CK 2005, 12th International Workshop on Computational Kinematics Cassino (2005)
Laribi, M.A., Romdhane, L., Zeghloul, S.: Analysis and dimensional synthesis of the DELTA robot for a prescribed workspace. J. Mechanism and Machine Theory 42, 859–870 (2007)
Masory, O., Wang, J.: Workspace evaluation of Stewart platforms. J. ASME, Design Engineering Division 45, 337–345 (1992)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2008 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Zhao, Y., Tang, Y., Zhao, Y. (2008). Dimensional Synthesis and Analysis of the 2-UPS-PU Parallel Manipulator. In: Xiong, C., Huang, Y., Xiong, Y., Liu, H. (eds) Intelligent Robotics and Applications. ICIRA 2008. Lecture Notes in Computer Science(), vol 5314. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-540-88513-9_16
Download citation
DOI: https://doi.org/10.1007/978-3-540-88513-9_16
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-540-88512-2
Online ISBN: 978-3-540-88513-9
eBook Packages: Computer ScienceComputer Science (R0)