
Abstract
In the paper authors present a concept and a modelling method of the static and dynamic loads of human body’s parts: bones and muscles during movement. Currently the problem of human body modelling is very important for many domains of our “better life” programs e.g.: an automotive—to find the best solution for human protection during accidents, sport—to find the most efficient and least tiring movements, to the health protection or extend the active life of the elderly. The human body is not a rigid multi-body system, but elastic, flexible and varying according to time. It consists of semi-stiff bones, elastic muscles and tendons. Other parts like stomach or liver are hanging on elastic wires and move relatively to each other during the whole acceleration process etc. All those elements can be broken or fatigued under some load. So the model of human body is not linear and shouldn’t be modelled by linear equation sets. Authors present the concept of human body modelling based on three types element chain. One type are “bones” that are coupled in joints and conduct loads to the support surface; the elastic tendons that keep the joints and propel bones rotation in joints, and muscles that generate forces for stabilization system or for propelling the bones. In paper the simplified model of human body built in MATLAB/Simulink software is presented. Some results of simulation e.g. load of a knee during squat or landing after jump are compared with real test results.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
A problem of human body modelling is getting more and more popular, because we pay more attention to health, body comfort and work effort. In our longer life we expect some problems with our skeleton like pain in neck, backbone or knees. It is a result of an injury that we had in youth. These injuries some times are the effect of accidents or the result of wrong movement during normal activities or sport. We try to avoid injuries by creating the passive and active safety systems in vehicles, creating more ergonomic furniture, better clothes—especially footwear.
To find the real risk of serious injury we develop tests and measurements—for validation of equipment. On the other hand we develop modelling methods. One of the methods used for evaluation of the effect of vehicle crash are phantoms (physical model) build with special materials that have similar structure to skin, muscle, fat and bones. This physical model is put on the driver’s and passenger’s seats and the crash test is carried out. After that the artificial body parts are examined. Those phantoms are very expensive and very often one-use-only, so these tests are very costly. When we could build a computer model of the vehicle’s construction and provide some dynamics simulation we would like to have a similar model for a human body.
Other domain where modelling of the body behaviour is very important is the safety of work or sport. During jogging on rigid surface our heels and knees are exposed on shocks which can be absorbed by sport shoes.
We can reduce those forces by improving the knowledge about our body and by developing good habits and right pattern of our muscle work.
Our body is still an attractive subject for research not only for medics. The technology that compensates disabilities appears to be more and more realistic (Fig. 1).

Photo (Tomasz Mirosław, Milipol 2015 Paris)
An active prosthesis of human leg.
Our body is composed of bones joined with joints or cartilage, muscles and tendons. All of them are flexible and have possibilities of energy absorption and dissipation on the other hand can be damaged or destroyed during the lifecycle. Currently we can treat our joints, muscles and tendons, with some medicines or in the worst case we can replace them with artificial implants or prosthesis. The analyses of forces acting in a human biological joint or in an artificial implants composed into natural system can help us to better design or use these implants.
2 Model of a Human Body
For many years scientists have built human body models using the theory of multibody modelling [1,2,3,4]. As the first approach and simplified model of movement system we can assume that our skeleton is made of rigid elements with joints which enable the relative movement between them. The movement is effected by muscles which generate the propelling torques.
Depending on the main purpose of modelling we can find more or less precise reflection of human bones in model [5,6,7]. In Fig. 2 the simplified model of movement system dedicated for basic movement (like standing, walking, running) analyses is presented. This model consist of: head, neck, shoulders, arms, forearms, joined part of backbone, pelvic bone, femurs and calves, and 2 toes for foot (big toe and rest). This model is called 17 segment models. Each part of this model has their mass, inertia, dimensions (presented in Fig. 3).

The model of human body motion system. The simplified model of human skeleton [18]

Mass and forces, inertia moment and torques, joints types of human body system model
This model is good enough for kinematic analyses during typical movement like walking. An example of moment analyses with mass centre trajectory is presented in Fig. 4.

The walking model with 17 segment human body model
This model can be described with forces in joints that can be calculated based on geometry processing methods GP [8]. When we assume that propelling torques are generated in joints we can implement this model to computer software in an easy to process form i.e. the Kroneker product is used to build the synthetic matrix equation.
Those approach is quite effective as it is proved by D. Grzelczyk and others (2018) [9] where Authors used the methodology of rigid body system modelling to solve very important problem of the human bone brake risk estimation during a “broomstick” human forward fall”, which especially consider elder people.
But in our body the moment comes from muscle forces or from gravity. Joints do not generate any torques. The muscles with tendons can generate forces and accumulate the potential energy and the muscle can dissipate it. But in more precise analyses we can find in our body bone and tendon bow-like structure for shock absorption and short term energy accumulation. Some bones are prepared to work as safety system—like a fuse, which can be broken when the load is too high.
In a typical model we assume that bones of the skeleton are propelled by muscles controlled by brain.
The model of a muscle and whole simplified movement system of skeleton with muscles is presented in Fig. 5 (based on [10, 11]).

a Model of human muscle that consists of three passive elements: a series elastic element corresponding to tendon and connective tissue, parallel elastic element and damper. b The model skeleton with muscles
When we introduce muscles flexible elements the other method of analyses is recommended. The modelling with flexible elements like ACNF should be more efficient in reference to human body [8].
The joints that connect bones are different. Almost all joints between different bones have different structure optimized to specific movement and load [12,13,14,15,16]. Usually for moment analyses we can differ them according to their degrees of freedom, but for other analyses for instance of load resistance we have to take into account much more construction details, that will be presented in further part of this paper.
The motion system is not a rigid system. The flexible part can be modelled by adding the parallel system of flexible elements which represent the muscles with tendons. It is the next simplification. Of course such a model reflects the energy accumulation function of muscles.
Although the bones are still rigid. But as it was mentioned above, one of the interesting problems is to estimate the forces in joints during dynamic process [9]. This forces can cause the rapid damage of joint when it overcomes the critical limit value or can cumulate the small damages when the load is too big.
For few years authors used the model developed for exoskeleton cooperation with human body. The method and model of human lower limbs was described in authors other paper [17].
In that paper the bones are modelled as the flexible body with geometrical size, mass, inertia and elastic ends (Fig. 6). Those are combined into multi-body system of bones joined with invisible tendons into the limb (Fig. 7). Forces affecting bones come from displacement of flexible ends.

A model of human bone with rigid body and flexible (resilient/spring ball) ends

Model of leg-as the bones joined with contact of flexible ends
Those methods were prepared to be implemented with MATLAB/Simulink software.
The example of 2D (two dimension) bone model is presented in Fig. 8. It consists of two terminals A and B (modelled in the same way) and mass centre. The body block have inputs for forces represented by components in horizontal and vertical reference systems) for two terminals A and B: FBXR (terminal B component X reaction force), FBYR (terminal B component Y reaction force) and external forces: FBXE and FBYE, analogous FAXR, FAYR, FAXE, FAYE for terminal A. The input Mext—represents the external torque for body rotation—which can represent the torque produced by muscles. Additionally the start position of mass centre X0 and Y0 with start angle ALFA and distances of terminals from the mass centre DLA and DLB are given. The outputs are: coordinated of real position terminal BX, CY, AX, AY and mass centre CX and CY and real angle. Additionally two outputs of MA and MB, representing torques generated in terminals, are present for tests.

The bone SIMULINK/MATLAB model. In reference to Fig. 6
The structure of terminal model is presented in Fig. 9. This model consists of terminal position calculator marked as DBXY. The effect of calculation is given to outputs EY and EX. Forces from inputs Fx, FXr and Fy, FYr are summed and given together with real angle to XY2SN transformation block, where XY components are converted to SN component. The orthogonal force component is used for torque calculation. These forces and torques are sent to mass centre model.

The bone terminal model
Model of mass centre is presented in Fig. 8. In this block the weight force appear and is transformed into SN components basing on actual rotation angle. These forces are summed with forces coming from terminal and, after dividing by mass value, appear the acceleration in axles N and S. This acceleration is converted to XY coordinate and integrated for real speed and XY position. The real speed is reversely converted to SN coordinates for damping force calculations. The CX and Y position is estimated in reference to Y0, X0—the start position.
In this block the torque is calculated as the sum of torques coming from both terminals and from the outside. This torque accelerates the rotation proportionally to inversion of body inertia moment. After its double integration we get real angle of body bending. So the model is geometrically oriented multimode system model, but the movement of element depend on interaction with joined bodies (Figs. 10 and 11).

The terminal position calculator

The mass centre block internal structure
The structure of joint is presented in Fig. 12. It consist of two blocks: Torque and reaction force generator. Their structure is shown in Figs. 13 and 14. The forces and torques are calculated in reference to displacement or bending flexible elements. So the forces are generated where displacement appears, not as the free vector. In the torque generator the input gamma is the value of the angle between bodies when torque of torsion is equal to zero. Each force and torque are multiplied by “−1” to give the action and reaction forces which are sent to both cooperating bodies. As we can see these structure are very simple and adjustable by setting various gains coefficients (Fig. 15).

Structure of joint model

Structure of reaction force generator

Generator of reaction torque

Block of ground reaction
3 Model Verification
The experiment with falling body (jump) down on the ground was chosen as the example of the model verification. It seems to be important because of potential to kinetic energy conversion and the dynamic changes of the system structure from free to open one. A damping and elasticity coefficient was set to constant value. In Fig. 16 the result for different values of coefficients is presented.

Examples of simulation results
The diagram of movement of the free end and mass centre of highest body is shown in Fig. 16. We can see that after landing this body is bending and rising. In Fig. 17 (right side) we can see the trajectory of mass centres of lower and middle part of the system. They are moved almost in a straight line.

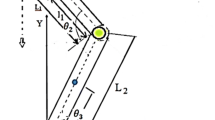
Forces acting on a knee joint
But for more reliable analyses we should take account the structure of joint. The most often damaged joint is the knee. Probably each of us experienced pain in it or for sure know someone who have or had knee injury. Fortunately the joint is much more complicated in its structure than hinge joint. Proposed spring ball-terminated ball model is more adequate for knee joint simulation than typical one axle hinge joint. The rolling heads of joined bones change the contact point and tangential forces acting with knee bent angle. The normal force creating the rotation torque goes though ligaments of the knee and muscles. The torque depends not only on muscles forces but on the angle of rotation and moving rotation point as it is shown in Fig. 17.
4 Conclusions
This model of limb, seems to be easily understandable and worked properly, so it has been the base for further development of modelling focused on forces acting in the heads of bones, muscles and tandems. These simulation results seems to be interesting and model can show the forces which appear in joints.
References
Pons, J.L.: Wearable Robots: Biomechatronic Exoskeletons, CSIC, Madrid, Spain. Wiley (2008)
Dollar, A., Her, H.: Lower extremity exoskeletons and active orthoses: challenges and state-of-the-art. IEEE Trans. Robot. 24(1), 144–158 (2008)
Zoss, A., Kazerooni, H., Chu, A.: Biomechanical design of the Berkeley Lower Extremity Exoskeleton (BLEEX). IEEE/ASME Trans. Mechatron. 11(2), 128–138 (2006)
Bortole, M., Venkatakrishman, A., Hill, A.V.: First and Last Experiments on Muscle Mechanics. Cambridge University Press, Cambridge (1970)
Ghan, J., Kazerooni, H.: System identification for the Berkeley Lower Extremity Exoskeleton (BLEEX). In: Proceedings of the International Conference on Robotics and Automation, Orlando, Florida (2006)
Low, K., Yin, Y.: An integrated lower exoskeleton system towards design of a portable active orthotic device. Int. J. Robot. Autom. 22(1), 32 (2007)
Pillai, M., Kazerooni, H., Hurwich, A.: Design of a semi-active knee-ankle prosthesis. In: IEEE International Conference on Robotics and Automation. Shanghai, China (2011)
Mikkola, A., Shabana, A., Sanchez-Rebollo, A., Jimenez-Octavio, C.: Comparison between ANCF and B-spline surfaces. Multibody Syst. Dyn. 30(2), 119–138 (2013)
Grzelczyk, D., Biesiacki, P., Mrozowski, J., Awrejcewicz, J.: Dynamic simulation of a novel “broomstick” human forward fall model and finite element analysis of the radius under the impact force during fall. J. Theor. Appl. Mech. 56(1), 239–253 (2018) (Warsaw)
Valiente, A.: Design of a quasi-passive parallel leg exoskeleton to augment load carrying for walking. Master’s thesis, Department of Mechanical Engineering, Massachusetts Institute Technology, Cambridge (2005)
Sawicki, G.S., Khan, N.S.: A simple model to estimate plantar flexor muscle-tendon mechanics and energetics during walking with elastic ankle exoskeletons. TBME 2015
Kumar, V.: Modeling, analysis and simulation of multibody systems with contact and friction, Peng Song (2002)
Otter, M., Elmqvist, H., Cellier, F.E.: Modeling of multibody system with the object-oriented modeling language dymola. Nonlinear Dyn. 9(1), 91–112 (1996)
Liu, Y., Schmiedeler, J., Wensing, P., Orin, D.: A 3D Dual-SLIP model of human walking over a range of speeds. http://biomechanics.osu.edu/dynamic-walking/AbstractsFolder/Liu_2015_DW.pdf
Bertholdt, M., Kapper, J., Schmodt, S., Schnorr, C.: A study of parts based object class direction using complete graphs. Int. J. Comput. Vis. (2010)
Zahariev, E.: Computer system for kinematic and dynamic analysis synthesis of rigid and flexible multibody systems. PAMM 8(1), 10163–10164 (2008)
Miroslaw, T.: The method of modeling of human skeletons multi-body system. In: Awrejcewicz, J. (eds.) Dynamical Systems: Modelling. DSTA 2015. Springer Proceedings in Mathematics & Statistics, vol. 181. Springer, Cham (2016)
Acknowledgements
This method was developed and model was built in reference to Polish Exoskeleton NCBIR project No. DOBR/0037/R/R/ID1/2012/03.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG, part of Springer Nature
About this paper

{kind=link}
Cite this paper
Mirosław, T., Zawadzki, A. (2018). Non-linear Modelling of Human Body Dynamic. In: Awrejcewicz, J. (eds) Dynamical Systems in Applications. DSTA 2017. Springer Proceedings in Mathematics & Statistics, vol 249. Springer, Cham. https://doi.org/10.1007/978-3-319-96601-4_23
Download citation
DOI: https://doi.org/10.1007/978-3-319-96601-4_23
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-96600-7
Online ISBN: 978-3-319-96601-4
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)