
Abstract
In this study, the problem of inverse matrix projective synchronization (IMPS) between different dimensional fractional order chaotic systems is investigated. Based on fractional order Lyapunov approach and stability theory of fractional order linear systems, new complex schemes are proposed to achieve inverse matrix projective synchronization (IMPS) between n-dimension and m-dimension fractional order chaotic systems. To validate the theoretical results and to verify the effectiveness of the proposed schemes, numerical applications and computer simulations are used.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others


Keywords
- Fractional chaos
- Inverse matrix projective synchronization
- Fractional-order Lyapunov approach
- Different dimensional systems
1 Introduction
Fractional calculus, as generalization of integer order integration and differentiation to its non-integer (fractional) order counterpart, has proved to be valuable tool in the modeling of many physical phenomena [1,2,3,4,5] and engineering problems [6,7,8,9,10,11,12,13]. Fractional derivatives provide an excellent instrument for the description of memory and hereditary properties of various materials and processes [14, 15]. The main reason for using integer-order models was the absence of solution methods for fractional differential equations [16, 17]. The advantages or the real objects of the fractional order systems are that we have more degrees of freedom in the model and that a “memory” is included in the model [18]. One of the very important areas of application of fractional calculus is the chaos theory [19, 20].
Chaos is a very interesting nonlinear phenomenon which has been intensively studied [21,22,23,24,25,26]. It is found to be useful or has great application potential in many fields such as secure communication [27], data encryption [28], financial systems [29] and biomedical engineering [30]. The research efforts have been devoted to chaos control [31,32,33] and chaos synchronization [34,35,36,37,38,39,40] problems in nonlinear science because of its extensive applications [41,42,43,44,45,46,47,48,49,50,51,52,53,54,55,56,57].
Recently, studying fractional order systems has become an active research area. The chaotic dynamics of fractional order systems began to attract much attention in recent years. It has been shown that the fractional order systems can also behave chaotically, such as the fractional order Chua’s system [58], the fractional order Lorenz system [59], the fractional order Chen system [60, 61], the fractional order Rössler system [62], the fractional-order Arneodo’s system [63], the fractional order Lü system [64], the fractional-order Genesio-Tesi system [65], the fractional order modified Duffing system [66], the fractional-order financial system [67], the fractional order Newton–Leipnik system [68], the fractional order Lotka-Volterra system [69] and the fractional order Liu system [70]. Moreover, recent studies show that chaotic fractional order systems can also be synchronized [71,72,73,74,75,76,77,78]. Many scientists who are interested in this field have struggled to achieve the synchronization of fractional–order chaotic systems, mainly due to its potential applications in secure communication and cryptography [79,80,81].
A wide variety of methods and techniques have been used to study the synchronization of the fractional–order chaotic such as sliding mode controller [82,83,84], active and adaptive control methods [85,86,87], feedback control method [88, 89], linear and nonlinear control methods [90, 91], scalar signal technique [92, 93]. Many types of synchronization for the fractional-order chaotic systems have been presented [94,95,96,97,98,99,100,101,102,103,104,105,106,107,108,109,110,111,112,113,114,115,116,117,118,119,120,121,122,123,124,125,126,127]. Among all types of synchronization, projective synchronization (PS) has been extensively considered. In PS, slave system variables are scaled replicas of the master system variables. A variation of projective synchronization is the so-called matrix projective synchronization (MPS) (or full state hybrid projective synchronization) [128,129,130]. Also, matrix projective synchronization (MPS) between fractional order chaotic systems has been studied [131,132,133,134]. In this type of synchronization the single scaling parameter originally introduced in [135] is replaced by a diagonal scaling matrix [136, 137] or by a full scaling matrix [138]. Recently, an interesting scheme has been introduced [139], in which each master slave system state achieves synchronization with any arbitrary linear combination of slave system states. Since master system states and slave system states are inverted with respect to the MPS, the proposed scheme is called inverse matrix projective synchronization (IMPS). Obviously, the problem of inverse matrix projective synchronization (IMPS) is an attractive idea and more difficult than the problem of matrix projective synchronization (MPS). The complexity of the IMPS scheme can have important effect in applications.
Based on these considerations, this study presents new control schemes for the problem of IMPS in fractional-order chaotic dynamical systems. Based on Laplace transform and fractional Lyapunov stability theory, the study first analyzes a new IMPS scheme between \(n-\)dimensional commensurate fractional-order master system and \(m-\)dimensional commensurate fractional-order slave system. Successively, by using some properties of fractional derivatives and stability theory of fractional-order linear systems, IMPS is proved between \(n-\)dimensional incommensurate fractional-order master system and \(m-\)dimensional commensurate fractional-order slave system. Finally, several numerical examples are illustrated, with the aim to show the effectiveness of the approaches developed herein.
This study is organized as follow. In Sect. 2, some basic concepts of fractional-order systems are introduced. In Sect. 3, the master and the slave systems are described to formulate the problem of IMPS. In Sect. 4, two control schemes are proposed which enables IMPS to be achieved for commensurate master system and incommensurate master system cases, respectively. In Sect. 5, simulation results are performed to verify the effectiveness and feasibility of the proposed schemes. Finally, concluding remarks end the study.
2 Basic Concepts
In this section, we present some basic concepts of fractional derivatives and stability of fractional systems which are helpful in the proving analysis of the proposed approaches.
2.1 Caputo Fractional Derivative
The idea of fractional integrals and derivatives has been known since the development of the regular calculus, with the first reference probably being associated with Leibniz in 1695. There are several definitions of fractional derivatives [140]. The Caputo derivative [141] is a time domain computation method. In real applications, the Caputo derivative is more popular since the un-homogenous initial conditions are permitted if such conditions are necessary. Furthermore, these initial values are prone to measure since they all have idiographic meanings [142]. The Caputo derivative definition is given by
where \(0<p\le 1,\) \(m = [p]\), i.e., m is the first integer which is not less than \(p, f^{m}\) is the m-order derivative in the usual sense, and \(J^{q}\) \(\left( q > 0 \right) \) is the q-order Reimann-Liouville integral operator with expression:
where \(\varGamma \) denotes Gamma function.
Some basic properties and Lemmas of fractional derivatives and integrals used in this study are listed as follows.
Property 1
For \(p=n\) , where n is an integer, the operation \(D_{t}^{p}\) gives the same result as classical integer order n . Particularly, when \(p=1\) , the operation \(D_{t}^{p}\) is the same as the ordinary derivative, i.e., \( D_{t}^{1}f\left( t\right) =\frac{df\left( t\right) }{dt}\) ; when \( p=0 \) , the operation \(D_{t}^{p}f\left( t\right) \) is the identity operation: \(D_{t}^{0}f\left( t\right) =f\left( t\right) \).
Property 2
Fractional differentiation (fractional integration) is linear operation:
Property 3
The fractional differential operator \(D_{t}^{p}\) is left-inverse (and not right-inverse) to the fractional integral operator \(J^{p}\) , i.e.
Lemma 1
[143] The Laplace transform of the Caputo fractional derivative rule reads
Particularly, when \(0<p\le 1\), we have
Lemma 2
[144] The Laplace transform of the Riemann-Liouville fractional integral rule satisfies
Lemma 3
[103] Suppose f(t) has a continuous kth derivative on [0, t] \((k\in N,\) \(t>0)\), and let \(p,q>0\) be such that there exists some \( \ell \in N\) with \(\ell \le k\) and p, \(p+q\in [\ell -1,\ell ]\). Then
Remark 1
Note that the condition requiring the existence of the number \(\ell \) with the above restrictions in the property is essential. In this work, we consider the case that \(0<p,\) \(q\le 1,\) and \(0<p+q\le 1\). Apparently, under such conditions this property holds.
2.2 Stability of Linear Fractional Systems
Consider the following linear fractional system
where \(p_{i}\) is a rational number between 0 and 1 and \(D_{t}^{p_{i}}\) is the Caputo fractional derivative of order \(p_{i}\), for \(i=1,2,...,n\). Assume that \(p_{i}=\frac{\alpha _{i}}{\beta _{i}}\), \(\left( \alpha _{i},\beta _{i}\right) =1,\) \(\alpha _{i},\beta _{i}\in \mathbb {N}\), for \(i=1,2,...,n\). Let d be the least common multiple of the denominators \(\beta _{i}\)’s of \(p_{i}\)’s.
Lemma 4
[145] If \(p_{i}\)’s are different rational numbers between 0 and 1, then the system (9) is asymptotically stable if all roots \( \lambda \) of the equation
satisfy \(\left| \arg \left( \lambda \right) \right| >\frac{\pi }{2d} , \) where \(A=\left( a_{ij}\right) _{n\times n}\).
2.3 Fractional Lyapunov Method
Definition 1
A continuous function \(\gamma \) is said to belong to class-K if it is strictly increasing and \(\gamma \left( 0\right) =0\).
Theorem 1
[146] Let \(X=0\) be an equilibrium point for the following fractional order system
where \(0<p\le 1\). Assume that there exists a Lyapunov function \(V\left( X\left( t\right) \right) \) and class-K functions \(\gamma _{i}\) \(\left( i=1,2,3\right) \) satisfying
Then the system (11) is asymptotically stable.
Theorem 2
[147] If there exists a positive definite Lyapunov function \( V\left( X\left( t\right) \right) \) such that \(D_{t}^{p}V\left( X\left( t\right) \right) <0\), for all \(t>0\), then the trivial solution of system (11) is asymptotically stable.
In the following, a new lemma for the Caputo fractional derivative is presented.
Lemma 5
[148] \(\forall X(t)\in \mathbf {R}^{n},\) \(\forall p\in \big ] 0,1\big ] \) and \(\forall t>0\)
3 System Description and Problem Formulation
We consider the following fractional chaotic system as the master system
where \(X\left( t\right) =\left( x_{1}\left( t\right) ,x_{2}\left( t\right) ,...,x_{n}\left( t\right) \right) ^{T}\) is the state vector of the master system (15), \(A=\left( a_{ij}\right) _{n\times n}\) is a constant matrix, \(f=\left( f_{i}\right) _{1\le i\le n}\) is a nonlinear function, \(D_{t}^{p}=\left[ D_{t}^{p_{1}},\right. \left. D_{t}^{p_{2}},...,D_{t}^{p_{n}}\right] \) is the Caputo fractional derivative and \(p_{i},\) \(i=1,2,...,n,\) are rational numbers between 0 and 1.
Also, consider the slave system as
where \(Y(t)=\left( y_{1}\left( t\right) , y_{2}\left( t\right) ,...,y_{m}\left( t\right) \right) ^{T}\) is the state vector of the slave system (16), \(g=\left( g_{i}\right) _{1\le i\le m}\), \(D_{t}^{q}\) is the Caputo fractional derivative of order q, where q is a rational number between 0 and 1 and \(U=\left( u_{i}\right) _{1\le i\le m}\) is a vector controller to be designed.
Before proceeding to the definition of inverse matrix projective synchronization (IMPS) for the coupled fractional chaotic systems (15) and (16), the definition of matrix projective synchronization (MPS) is provided.
Definition 2
The n-dimensional master system X(t) and the m-dimensional slave system Y(t) are said to be matrix projective synchronization (MPS), if there exists a controller \(U=\left( u_{i}\right) _{1\le i\le m}\) and a given constant matrix \(\varLambda =\left( \varLambda _{ij}\right) _{m\times n}\), such that the synchronization error
satisfies that \(\lim \) \(_{t\longrightarrow +\infty }\left\| e\left( t\right) \right\| =0.\)
Definition 3
The n-dimensional master system X(t) and the m-dimensional slave system Y(t) are said to be inverse matrix projective synchronization (IMPS), if there exists a controller \(U=\left( u_{i}\right) _{1\le i\le m}\) and a given constant matrix \(M=\left( M_{ij}\right) _{n\times m}\), such that the synchronization error
satisfies that \(\lim \) \(_{t\longrightarrow +\infty }\left\| e\left( t\right) \right\| =0.\)
Remark 2
The problem of inverse matrix projective synchronization in chaotic discrete-time systems have been studied and carried out, for example, in Ref. [149].
4 Fractional IMPS Schemes
In this section, we discuss two schemes of IMPS between the master system (15) and the slave system (16): The first scheme is proposed when the master system is commensurate system and the second one is constructed when the master system is incommensurate system. In this study, we assume that \(n<m\).
4.1 Case 1
In this case, we assume that \(p_{1}=p_{2}=...=p_{n}=p\) and \(q<p\). The error system of IMPS, in scalar form, between the master system (15) and the slave system (16) is defined by
Suppose that the controllers \(u_{i},\ i=1,2,...,m,\) can be designed in the following form
where \(v_{i},\) \(1\le i\le m,\) are new controllers to be determined later.
By substituting Eq. (20) into Eq. (16), we can rewrite the slave system as
Now, applying the Laplace transform to (21) and letting
we obtain,
multiplying both the left-hand and right-hand sides of (23) by \( s^{p-q},\) and again applying the inverse Laplace transform to the result, we obtain
Now, the Caputo fractional derivative for order p of the error system (19) can be derived as
Furthermore, the error system (25) can be written as
where \(\left( c_{ij}\right) \in \mathbf {R}^{n\times n}\) are control constants and
Rewriting the error system (26) in the compact form
where \(e\left( t\right) =\left( e_{1}\left( t\right) , e_{2}\left( t\right) ,...,e_{n}\left( t\right) \right) ^{T}\), \(C=\left( c_{ij}\right) _{n\times n} \) is a control matrix to be selected later, \(R=\left( R_{1},R_{2},...,R_{n}\right) ^{T}\) and \(V=\left( v_{1},v_{2},...,v_{n},v_{n+1},...,v_{m}\right) ^{T}\).
Theorem 3
If the control matrix \(C\in \mathbf {R}^{n\times n}\) is chosen such that \( P=A-C\) is a negative definite matrix, then the master system (15) and the slave system (16) are globally inverse matrix projective synchronized under the following control law
and
where \(\hat{M}^{-1}\) is the inverse matrix of \(\hat{M}=\left( M_{ij}\right) _{n\times n}.\)
Proof
By using (30), the error system (28) can be writtes as
where \(\hat{M}=\left( M_{ij}\right) _{n\times n}\). Applying the control law given in Eqs. (29) to (31) yields the resulting error dynamics as follows
If a Lyapunov function candidate is chosen as
then the time Caputo fractional derivative of order p of V along the trajectory of the system (32) is as follows
and by using Lemma 5 in Eq. (34) we get
Thus, from Theorem 2, it is immediate that is the zero solution of the system (32) is globally asymptotically stable and therefore, systems (15) and (16) are globally inverse matrix projective synchronized.
4.2 Case 2
Now, in this case, we assume that \(p_{1}\ne p_{2}\ne \ldots \ne p_{n}\) and \( q<p_{i}\) for \(i=1,2,...,n.\) The vector controller \(U=\left( u_{i}\right) _{1\le i\le m}\) can be designed a
where \(v_{i},\) \(i=1,...,n,\) are new controllers. By substituting Eq. (35) into Eq. (16), we can rewrite the slave system as
and
By applying the Caputo fractional derivative of order \(p_{i}-q\) to both the left and right sides of Eq. (36) and by using Lemma (3), we obtain
In this case, the error system between the master system (15) and the slave system (16) can be derived as
Furthermore, the error system (39) can be written as
where
Rewriting the error system (41) in the compact form
where \(D_{t}^{p}{=}\left[ D_{t}^{p_{1}},D_{t}^{p_{2}},...,D_{t}^{p_{n}}\right] ,\) \(e\left( t\right) {=}\left[ e_{1}\left( t\right) , e_{2}\left( t\right) ,...,e_{n}\left( t\right) \right] ^{T},\) \(T=\left( T_{1},T_{2},...,T_{n}\right) ^{T}\) and \(V=\left( v_{1},v_{2},...,v_{n}\right) ^{T}\).
To achieve IMPS between the master system (15) and the slave system (16), we assume that \(M_{ii}\ne 0,\) \(i=1,2,...,n.\) Hence, we have the following result.
Theorem 4
There exists a feedback gain matrix \(L\in \mathbf {R}^{n\times n}\) to realize inverse matrix projective synchronization between the master system (15) and the slave system (16) under the following control law
Proof
Applying the control law given in Eq. (43) to Eq. (42), the error system can be described as
The feedback gain matrix L is chosen such that all roots \(\lambda \), of
satisfy \(\left| \arg \left( \lambda \right) \right| >\frac{\pi }{2d} , \) where d is the least common multiple of the denominators of \(p_{i},\) \( i=1,2,...,n\). According to Lemma 4, we conclude that the zero solution of the error system (44) is globally asymptotically stable and therefore, systems (15) and (16) are IMPS synchronized.
5 Numerical Examples
In this section, two numerical examples are used to show the effectiveness of the derived results.
5.1 Example 1
In this example, we consider the commensurate fractional order Lorenz system as the master system and the controlled hyperchaotic fractional order, proposed by Zhou et al. [151], as the slave system.
The master system is defined as
where \(x_{1},x_{2}\) and \(x_{3}\) are states. For example, chaotic attractors are found in [150], when \((\alpha , \beta , \gamma )=(10,\frac{8}{3} ,28)\) and \(p=0.993.\) Different chaotic attractors of the fractional order Lorenz system (46) are shown in Figs. 1 and 2.

Phase portraits of the master system (46) in 2-D

Phase portraits of the master system (46) in 3-D
Compare system (46) with system (15), one can have
The slave system is described by
where \(y_{1},y_{2},y_{3},y_{4}\) are states and \(u_{i},\) \(i=1,2,3,4,\) are synchronization controllers. The uncontrolled fractional hyperchaotic system (47) (i.e. the system (47) with \(u_{1}=u_{2}=u_{3}=u_{4}=0\)) exhibits hyperchaotic behavior when \(q=0.95\). Attractors in 2-D and 3-D of the uncontrolled fractional hyperchaotic system (47) are shown in Figs. 3 and 4.

Phase portraits of the slave system (47) in 2-D

Phase portraits of the slave system (47) in 3-D
In this example, the error system of IMPS between the master system (46) and the slave system (47) is defined as
where
So,
According to Theorem 3, there exists a control matrix \(C\in \mathbf {R} ^{3\times 3}\) so that systems (46) and (47) realize the IMPS. For example, the control matrix C can be chosen as
It is easy to show that \(A-C\) is a negative definite matrix. Then the control functions are designed as
Hence, the IMPS between the master system (46) and the slave system (47) is achieved. The error system can be described as follows
For the purpose of numerical simulation, fractional Euler integration method has been used. In addition, simulation time \(Tm=120\,\mathrm{s}\) and time step \(h=0.005s\) have been employed. The initial values of the master system and the slave system are \([x_{1}(0),x_{2}(0),x_{3}(0)]=[3,4,5]\) and \( [y_{1}(0),y_{2}(0),y_{3}(0),y_{4}(0)]=[-1,1.5,-1,-2],\) respectively, and the initial states of the error system are \( [e_{1}(0),e_{2}(0),e_{3}(0)]=[13,12.5,20]\). Figure 5 displays the time evolution of the errors of IMPS between the master system (46) and the slave system (47).

5.2 Example 2
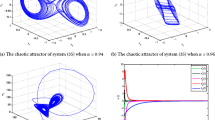
In this example, we assumed that the incommensurate fractional order Liu system is the master system and the incommensurate fractional order hyperchaotic Liu system [153] is the slave system. The master system is defined as
where \(x_{1},x_{2}\) and \(x_{3}\) are states. For example, chaotic attractors are found in [152], when \(\left( p_{1},p_{2},p_{3}\right) =\left( 0.93,0.94,0.95\right) \) and \(\left( a,b,c\right) =\left( 10,40,2.5\right) \). The Liu chaotic attractors are shown in Figs. 6 and 7.

Phase portraits of the master system (52) in 2-D

Phase portraits of the master system (52) in 3-D
Compare system (52) with system (15), one can have
The slave system is given by
where \(y_{1},y_{2},y_{3},y_{4}\) are states and \(u_{i},\) \(i=1,2,3,4,\) are synchronization controllers. The fractional order hyperchaotic Liu system (i.e. the system (53) with \(u_{1}=u_{2}=u_{3}=u_{4}=0\)) exhibits hyperchaotic behavior when \(q=0.9\) [153]. Attractors in 2-D and 3-D of the fractional hyperchaotic Liu system are shown in Figs. 8 and 9.

Phase portraits of the slave system (53) in 2-D

Phase portraits of the slave system (53) in 3-D
In this example, the error system of IMPS between the master system (52) and the slave system (53) is defined as
where
So,
According to Theorem 4, there exists a feedbak gain matrix \(L\in \mathbf {R} ^{3\times 3}\) so that systems (52) and (53) realize the IMPS. For example, the feedbak gain matrix L can be selected as
and the control functions are constructed as follows
The roots of \(det\left( \text {diag}\left( \lambda ^{d0.93},\lambda ^{d0.94},\lambda ^{d0.95}\right) +L-A\right) =0,\) where d is the least common multiple of the denominators of the numbers 0.93, 0.94 and 0.95, can be written as follows

It is easy to see that \(\arg \left( \lambda _{i}\right) >\frac{\pi }{2d},\) \( i=1,2,3,\) and therefore, the IMPS between systems (52) and (53) is achieved.
The error system can be described as follows
For the purpose of numerical simulation, fractional Euler integration method has been used. In addition, simulation time \(Tm=120\,\mathrm{s}\) and time step \(h=0.005s\) have been employed. The initial values of the master system and the slave system are \([x_{1}(0), x_{2}(0), x_{3}(0)]=[0,3,9]\) and \( [y_{1}(0),y_{2}(0),y_{3}(0),y_{4}(0)]=[2,-1,1,1],\) respectively, and the initial states of the error system are \( [e_{1}(0),e_{2}(0),e_{3}(0)]=[-11,-7,3]\). Figure 10 displays the time evolution of the errors of IMPS between the master system (52) and the slave system (53).
6 Conclusions
In this study, two new complex schemes of the inverse matrix projective synchronization (IMPS) were proposed between a master system of dimension n and a slave system of dimension m. Namely, by exploiting the fractional Lyapunov technique and stability theory of fractional-order linear system, the IMPS is rigorously proved to be achievable including the two cases: commensurate and incommensurate master systems. Finally, the effectiveness of the method has been illustrated by synchronizing a three-dimensional commensurate fractional Lorenz system with four-dimensional commensurate hyperchaotic fractional Zhou-Wei-Cheng system, and a three-dimensional incommensurate fractional order Liu system with four-dimensional commensurate fractional order hyperchaotic Liu system
The proposed approach presents some useful features:
-
(i)
it enables chaotic (hyperchaotic) fractional system with different dimension to be synchronized;
-
(ii)
it is rigorous, being based on theorems;
-
(iii)
it can be applied to a wide class of chaotic (hyperchaotic) fractional systems;
-
(iv)
due to the complexity of the proposed scheme, the fractional IMPS may enhance security in communication and chaotic encryption schemes.
References
Jumarie, G. (1992). A Fokker-Planck equation of fractional order with respect to time. Journal of Mathematical Physics, 33, 3536–3541.
Metzler, R., Glockle, W. G., & Nonnenmacher, T. F. (1994). Fractional model equation for anomalous diffusion. Physica A, 211, 13–24.
Mainardi, F. (1997). Fractional calculus: some basic problems in continuum and statistical mechanics. In A. Carpinteri & F. Mainardi (Eds.), Fractals and Fractional Calculus in Continuum Mechanics. Springer.
Hilfer, R. (2000). Applications of fractional calculus in physics. World Scientific.
Parada, F. J. V., Tapia, J. A. O., & Ramirez, J. A. (2007). Effective medium equations for fractional Fick’s law in porous media. Physica A, 373, 339–353.
Koeller, R. C. (1984). Application of fractional calculus to the theory of viscoelasticity. Journal of Applied Mechanics, 51, 299–307.
Axtell, M., & Bise, E. M. (1990). Fractional calculus applications in control systems. In Proceedings of the IEEE National Aerospace and Electronics Conference New York (pp. 563–566).
Dorčák, L. (1994). Numerical models for the simulation of the fractional-order control systems, UEF-04-94., Institute of Experimental Physics Košice, Slovakia: The Academy of Sciences.
Pires, E. J. S., Machado, J. A. T., & de Moura, P. B. (2003). Fractional order dynamics in a GA planner. Signal Process, 83, 2377–2386.
Magin, R. L. (2006). Fractional calculus in bioengineering. Begell House Publishers.
Tseng, C. C. (2007). Design of FIR and IIR fractional order Simpson digital integrators. Signal Process, 87, 1045–1057.
da Graca, M. M., Duarte, F. B. M., & Machado, J. A. T. (2008). Fractional dynamics in the trajectory control of redundant manipulators. Communications in Nonlinear Science and Numerical Simulation, 13, 1836–1844.
Hedrih, K. S., & Stanojevic, V. N. (2010). A model of gear transmission: fractional order system dynamics. Mathematical Problems in Engineering, 1–23.
Nakagava, N., & Sorimachi, K. (1992). Basic characteristic of a fractance device. IEICE Transactions on Fundamentals of Electronics, 75, 1814–1818.
Westerlund, S. (2002). Dead Matter Has Memory!. Causal Consulting.
Oldham, K. B., & Spanier, J. (1974). The fractional calculus. Academic.
Miller, K. S., & Ross, B. (1993). An Introduction to the fractional calculus and fractional differential equations. Wiley.
Petráš, I. (2008). A note on the fractional-order Chua’s system. Chaos, Solitons & Fractals, 38, 140–147.
West, B. J., Bologna, M., & Grigolini, P. (2002). Physics of fractal operators. Springer.
Zaslavsky, G.M. (2005). Hamiltonian chaos and fractional dynamics. Oxford University Press.
Azar, A. T., & Vaidyanathan, S. (2015). Chaos modeling and control systems design, studies in computational intelligence (vol. 581). Germany: Springer.
Azar, A. T., & Vaidyanathan, S. (2016). Advances in chaos theory and intelligent control. Studies in Fuzziness and Soft Computing (vol. 337). Germany: Springer. ISBN 978-3-319-30338-3.
Azar, A. T., & Vaidyanathan, S. (2015). Computational intelligence applications in modeling and control. Studies in Computational Intelligence (vol. 575). Germany: Springer. ISBN 978-3-319-11016-5.
Azar, A. T., & Vaidyanathan, S. (2015). Handbook of research on advanced intelligent control engineering and automation. Advances in Computational Intelligence and Robotics (ACIR) Book Series, IGI Global, USA. ISBN 9781466672482.
Zhu, Q., & Azar, A. T. (2015). Complex system modelling and control through intelligent soft computations. Studies in Fuzziness and Soft Computing (vol. 319). Germany: Springer. ISBN 978-3-319-12882-5.
Azar, A. T., & Zhu, Q. (2015). Advances and applications in sliding mode control systems. Studies in Computational Intelligence (vol. 576). Germany: Springer. ISBN 978-3-319-11172-8.
Filali, R. L., Benrejeb, M., & Borne, P. (2014). On observer-based secure communication design using discrete-time hyperchaotic systems. Communications in Nonlinear Science and Numerical Simulation, 19, 1424–1432.
Sheikhan, M., Shahnazi, M., & Garoucy, S. (2013). Hyperchaos synchronization using PSO-optimized RBF-based controllers to improve security of communication systems. Neural Computing & Applications, 22(5), 835–846.
Fernando, J. (2011). Applying the theory of chaos and a complex model of health to establish relations among financial indicators. Procedia Computer Science, 3, 982–986.
Zsolt, B. (1997). Chaos theory and power spectrum analysis in computerized cardiotocography. European Journal of Obstetrics & Gynecology and Reproductive Biology, 71(2), 163–168.
Chen, G., & Dong, X. (1989). From chaos to order. World Scientific.
Ott, E., Grebogi, C., & Yorke, J. A. (1990). Controling chaos. Physical Review Letters, 64, 1196–1199.
Boccalettis, C., Grebogi, Y. C., LAI, M. H., & Maza, D. (2000). The control of chaos: theory and application. Physics Reports, 329, 103–197.
Yamada, T., & Fujisaka, H. (1983). Stability theory of synchroized motion in coupled-oscillator systems. Progress of Theoretical Physics, 70, 1240–1248.
Pecora, L. M., & Carroll, T. L. (1990). Synchronization in chaotic systems. Physical Review Letters, 64, 821–827.
Carroll, T. L., & Pecora, L. M. (1991). Synchronizing a chaotic systems. IEEE Transactions on Circuits and Systems, 38, 453–456.
Pikovsky, A., Rosenblum, M., & Kurths, J. (2001). Synchronization an universal concept in nonlinear sciences. Cambridge university press.
Boccaletti, S., Kurths, J., Osipov, G., Valladares, D. L., & Zhou, C. S. (2002). The synchronization of chaotic systems. Physics Reports, 366, 1–101.
Aziz-Alaoui, M. A. (2006). Synchronization of chaos. Encyclopedia of Mathematical Physics, 5, 213–226.
Luo, A. (2009). A theory for synchronization of dynamical systems. Communications in Nonlinear Science and Numerical Simulation, 14, 1901–1951.
Vaidyanathan, S., Sampath, S., & Azar, A. T. (2015). Global chaos synchronisation of identical chaotic systems via novel sliding mode control method and its application to Zhu system. International Journal of Modelling, Identification and Control (IJMIC), 23(1), 92–100.
Vaidyanathan, S., Azar, A. T., Rajagopal, K., & Alexander, P. (2015). Design and SPICE implementation of a 12-term novel hyperchaotic system and its synchronization via active control, (2015). International Journal of Modelling. Identification and Control (IJMIC), 23(3), 267–277.
Vaidyanathan, S., & Azar, A. T. (2016). Takagi-sugeno fuzzy logic controller for liu-chen four-scroll chaotic system. International Journal of Intelligent Engineering Informatics, 4(2), 135–150.
Ouannas, A., Azar, A. T., & Abu-Saris, R. (2016). A new type of hybrid synchronization between arbitrary hyperchaotic maps. International Journal of Machine Learning and Cybernetics. doi:10.1007/s13042-016-0566-3.
Vaidyanathan, S., Azar, A. T. (2015). Anti-Synchronization of identical chaotic systems using sliding mode control and an application to vaidyanathan-madhavan chaotic systems. In A. T. Azar & Q. Zhu (Eds.), Advances and applications in sliding mode control systems. Studies in Computational Intelligence book Series (vol. 576, pp. 527–547), GmbH Berlin/Heidelberg: Springer. doi:10.1007/978-3-319-11173-5_19.
Vaidyanathan, S., & Azar, A. T. (2015). Hybrid synchronization of identical chaotic systems using sliding mode control and an application to vaidyanathan chaotic systems. In A. T. Azar & Q. Zhu, (Eds.), Advances and applications in sliding mode control systems. Studies in Computational Intelligence book Series, (vol. 576, pp. 549–569), GmbH Berlin/Heidelberg: Springer. doi:10.1007/978-3-319-11173-5_20.
Vaidyanathan, S., & Azar, A. T. (2015). analysis, control and synchronization of a Nine-Term 3-D novel chaotic system. In A. T. Azar & S. Vaidyanathan (Eds.), Chaos Modeling and Control Systems Design, Studies in Computational Intelligence (vol. 581, pp. 3–17), GmbH Berlin/Heidelberg: Springer. doi:10.1007/978-3-319-13132-0_1.
Vaidyanathan, S., & Azar, A. T. (2015). Analysis and control of a 4-D novel hyperchaotic system. In A. T. Azar & S. Vaidyanathan (Eds.), Chaos modeling and control systems design, Studies in Computational Intelligence (vol. 581, pp. 19–38), GmbH Berlin/Heidelberg: Springer. dpoi:10.1007/978-3-319-13132-0_2.
Vaidyanathan, S., Idowu, B. A., & Azar, A. T. (2015). Backstepping controller design for the global chaos synchronization of sprott’s jerk systems. In A. T. Azar & S. Vaidyanathan (Eds.), chaos modeling and control systems design, Studies in Computational Intelligence, (vol. 581, pp. 39–58), GmbH Berlin/Heidelberg: Springer. doi:10.1007/978-3-319-13132-0_3.
Boulkroune, A., Bouzeriba, A., Bouden, T., & Azar, A. T. (2016). Fuzzy adaptive synchronization of uncertain fractional-order chaotic systems. In A. T Azar & S. Vaidyanathan (Eds.), Advances in chaos theory and intelligent control. Studies in Fuzziness and Soft Computing (vol. 337). Germany: Springer.
Boulkroune, A., Hamel, S., & Azar, A. T. (2016). Fuzzy control-based function synchronization of unknown chaotic systems with dead-zone input. Advances in chaos theory and intelligent control. Studies in Fuzziness and Soft Computing (vol. 337), Germany: Springer.
Vaidyanathan, S., & Azar, A. T. (2016). Dynamic analysis, adaptive feedback control and synchronization of an Eight-Term 3-D novel chaotic system with three quadratic nonlinearities. Advances in chaos theory and intelligent control. Studies in Fuzziness and Soft Computing (vol. 337). Germany: Springer.
Vaidyanathan, S., & Azar, A. T. (2016). Qualitative study and adaptive control of a novel 4-D hyperchaotic system with three quadratic nonlinearities. Advances in chaos theory and intelligent control. Studies in Fuzziness and Soft Computing (vol. 337). Germany: Springer.
Vaidyanathan, S., & Azar, A. T. (2016). A novel 4-D four-wing chaotic system with four quadratic nonlinearities and its synchronization via adaptive control method. Advances in chaos theory and intelligent control. Studies in Fuzziness and Soft Computing (vol. 337). Germany: Springer.
Vaidyanathan, S., & Azar, A. T. (2016). Adaptive control and synchronization of halvorsen circulant chaotic systems. Advances in chaos theory and intelligent control. Studies in Fuzziness and Soft Computing (vol. 337). Germany: Springer.
Vaidyanathan, S., & Azar, A. T. (2016). Adaptive backstepping control and synchronization of a novel 3-D jerk system with an exponential nonlinearity. Advances in chaos theory and intelligent control. Studies in Fuzziness and Soft Computing (vol. 337). Germany: Springer.
Vaidyanathan, S., & Azar, A. T. (2016). Generalized projective synchronization of a novel hyperchaotic Four-Wing system via adaptive control method. Advances in chaos theory and intelligent control. Studies in Fuzziness and Soft Computing. (vol. 337). Germany: Springer.
Hartley, T., Lorenzo, C., & Qammer, H. (1995). Chaos in a fractional order Chua’s system. IEEE Transactions on Circuits and Systems I Fundamental Theory and Applications, 42, 485–490.
Grigorenko, I., & Grigorenko, E. (2003). Chaotic dynamics of the fractional Lorenz system. Physical Review Letters, 91, 034101.
Li, C., & Chen, G. (2004). Chaos in the fractional order Chen system and its control. Chaos Solitons Fractals, 22, 549–554.
Lu, J. G., & Chen, G. (2006). A note on the fractional-order Chen system. Chaos Solitons Fractals, 27, 685–688.
Li, C., & Chen, G. (2004). Chaos and hyperchaos in fractional order R össler equations. Physica A, 341, 55–61.
Lu, J. G. (2005). Chaotic dynamics and synchronization of fractional-order Arneodo’s systems. Chaos Solitons Fractals, 26, 1125–1133.
Deng, W. H., & Li, C. P. (2005). Chaos synchronization of the fractional Lü system. Physica A, 353, 61–72.
Guo, L. J. (2005). Chaotic dynamics and synchronization of fractional-order Genesio-Tesi systems. Chinese Physics, 14, 1517–1521.
Ge, Z. M., & Ou, C. Y. (2007). Chaos in a fractional order modified Duffing system. Chaos Solitons Fractals, 34, 262–291.
Chen, W. C. (2008). Nonlinear dynamic and chaos in a fractional-order financial system. Chaos Solitons Fractals, 36, 1305–1314.
Sheu, L. J., Chen, H. K., Chen, J. H., Tam, L. M., Chen, W. C., Lin, K. T., et al. (2008). Chaos in the Newton-Leipnik system with fractional order. Chaos Solitons Fractals, 36, 98–103.
Ahmed, E., El-Sayed, A. M. A., & El-Saka, H. A. A. (2007). Equilibrium points, stability and numerical solutions of fractional-order predator-prey and rabies models. Journal of Mathematical Analysis and Applications, 325, 542–553.
Gejji, V. D., & Bhalekar, S. (2010). Chaos in fractional order Liu system. Computers & Mathematics with Applications, 59, 1117–1127.
Li, C., & Zhou, T. (2005). Synchronization in fractional-order differential systems. Physica D, 212, 111–125.
Wang, J., Xiong, X., & Zhang, Y. (2006). Extending synchronization scheme to chaotic fractional-order Chen systems. Physica A, 370, 279–285.
Li, C. P., Deng, W. H., & Xu, D. (2006). Chaos synchronization of the Chua system with a fractional order. Physica A, 360, 171–185.
Peng, G. (2007). Synchronization of fractional order chaotic systems. Physics Letters A, 363, 426–432.
Yan, J., & Li, C. (2007). On chaos synchronization of fractional differential equations. Chaos Solitons Fractals, 32, 725–735.
Li, C., & Yan, J. (2007). The synchronization of three fractional differential systems. Chaos Solitons Fractals, 32, 751–757.
Zhou, S., Li, H., Zhu, Z., & Li, C. (2008). Chaos control and synchronization in a fractional neuron network system. Chaos Solitons Fractals, 36, 973–984.
Zhu, H., Zhou, S., & Zhang, J. (2009). Chaos and synchronization of the fractional-order Chua’s system. Chaos Solitons Fractals, 39, 1595–1603.
Wu, X., Wang, H., & Lu, H. (2012). Modified generalized projective synchronization of a new fractional-order hyperchaotic system and its application to secure communication. Nonlinear Analysis: Real World Applications, 13(2012), 1441–1450.
Liang, H., Wang, Z., Yue, Z., & Lu, R. (2012). Generalized synchronization and control for incommensurate fractional unified chaotic system and applications in secure communication. Kybernetika, 48, 190–205.
Muthukumar, P., & Balasubramaniam, P. (2013). Feedback synchronization of the fractional order reverse butterfly-shaped chaotic system and its application to digital cryptography. Nonlinear Dynamics, 1169–1181.
Chen, L., Wu, R., He, Y., & Chai, Y. (2015). Adaptive sliding-mode control for fractional-order uncertain linear systems with nonlinear disturbances. Nonlinear Dynamics, 80, 51–58.
Liu, L., Ding, W., Liu, C., Ji, H., & Cao, C. (2014). Hyperchaos synchronization of fractional-order arbitrary dimensional dynamical systems via modified sliding mode control. Nonlinear Dynamics, 76, 2059–2071.
Zhang, L., & Yan, Y. (2014). Robust synchronization of two different uncertain fractional-order chaotic systems via adaptive sliding mode control. Nonlinear Dynamics, 76, 1761–1767.
Srivastava, M., Ansari, S. P., Agrawal, S. K., Das, S., & Leung, A. Y. T. (2014). Anti-synchronization between identical and non-identical fractional-order chaotic systems using active control method. Nonlinear Dynamics, 76, 905–914.
Agrawal, S. K., & Das, S. (2013). A modified adaptive control method for synchronization of some fractional chaotic systems with unknown parameters. Nonlinear Dynamics, 73, 907–919.
Zhou, P., & Bai, R. (2015). The adaptive synchronization of fractional-order chaotic system with fractional-order 1 \(<\) q \(<\) 2 via linear parameter update law. Nonlinear Dynamics, 80, 753–765.
Odibat, Z. (2010). Adaptive feedback control and synchronization of non-identical chaotic fractional order systems. Nonlinear Dynamics, 60, 479–487.
Yuan, W. X., & Mei, S. J. (2009). Synchronization of the fractional order hyperchaos Lorenz systems with activation feedback control. Communications in Nonlinear Science and Numerical Simulation, 14, 3351–3357.
Odibat, Z. M., Corson, N., Aziz-Alaoui, M. A., & Bertelle, C. (2010). Synchronization of chaotic fractional-order systems via linear control. International Journal of Bifurcation and Chaos, 20, 81–97.
Chen, X. R., & Liu, C. X. (2012). Chaos synchronization of fractional order unified chaotic system via nonlinear control. International Journal of Modern Physics B, 25, 407–415.
Cafagna, D., & Grassi, G. (2012). Observer-based projective synchronization of fractional systems via a scalar signal: application to hyperchaotic Rössler systems. Nonlinear Dynamics, 68, 117–128.
Peng, G., & Jiang, Y. (2008). Generalized projective synchronization of a class of fractional-order chaotic systems via a scalar transmitted signal. Physics Letters A, 372, 3963–3970.
Odibat, Z. M. (2012). A note on phase synchronization in coupled chaotic fractional order systems. Nonlinear Analysis: Real World Applications, 13, 779–789.
Chen, F., Xia, L., & Li, C. G. (2012). Wavelet phase synchronization of fractional-order chaotic systems. Chinese Physics Letters, 29, 6–070501.
Razminiaa, A., & Baleanu, D. (2013). Complete synchronization of commensurate fractional order chaotic systems using sliding mode control. Mechatronics, 23, 873–879.
Pan, L., Zhou, W., Fang, J., & Li, D. (2010). Synchronization and anti-synchronization of new uncertain fractional-order modified unified chaotic systems. Communications in Nonlinear Science and Numerical Simulation, 15, 3754–3762.
Liu, F. C., Li, J. Y., & Zang, X. F. (2011). Anti-synchronization of different hyperchaotic systems based on adaptive active control and fractional sliding mode control. Acta Physica Sinica, 60, 030504.
Al-sawalha, M. M., Alomari, A. K., Goh, S. M., & Nooran, M. S. M. (2011). Active anti-synchronization of two identical and different fractional-order chaotic systems. International Journal of Nonlinear Science, 11, 267–274.
Li, C. G. (2006). Projective synchronization in fractional order chaotic systems and its control. Progress of Theoretical Physics, 115, 661–666.
Shao, S. Q., Gao, X., & Liu, X. W. (2007). Projective synchronization in coupled fractional order chaotic Rössler system and its control. Chinese Physics, 16, 2612–2615.
Wang, X. Y., & He, Y. J. (2008). Projective synchronization of fractional order chaotic system based on linear separation. Physics Letters A, 372, 435–441.
Si, G., Sun, Z., Zhang, Y., & Chen, W. (2012). Projective synchronization of different fractional-order chaotic systems with non-identical orders. Nonlinear Analysis: Real World Applications, 13, 1761–1771.
Agrawal, S. K., & Das, S. (2014). Projective synchronization between different fractional-order hyperchaotic systems with uncertain parameters using proposed modified adaptive projective synchronization technique. Mathematical Methods in the Applied Sciences, 37, 2164–2176.
Chang, C. M., & Chen, H. K. (2010). Chaos and hybrid projective synchronization of commensurate and incommensurate fractional-order Chen-Lee systems. Nonlinear Dynamics, 62, 851–858.
Wang, S., Yu, Y. G., & Diao, M. (2010). Hybrid projective synchronization of chaotic fractional order systems with different dimensions. Physica A, 389, 4981–4988.
Zhou, P., & Zhu, W. (2011). Function projective synchronization for fractional-order chaotic systems. Nonlinear Analysis: Real World Applications, 12, 811–816.
Zhou, P., & Cao, Y. X. (2010). Function projective synchronization between fractional-order chaotic systems and integer-order chaotic systems. Chinese Physics B, 19, 100507.
Xi, H., Li, Y., & Huang, X. (2015). Adaptive function projective combination synchronization of three different fractional-order chaotic systems. Optik, 126, 5346–5349.
Peng, G. J., Jiang, Y. L., & Chen, F. (2008). Generalized projective synchronization of fractional order chaotic systems. Physica A, 387, 3738–3746.
Shao, S. Q. (2009). Controlling general projective synchronization of fractional order Rössler systems. Chaos Solitons Fractals, 39, 1572–1577.
Wu, X. J., & Lu, Y. (2009). Generalized projective synchronization of the fractional-order Chen hyperchaotic system. Nonlinear Dynamics, 57, 25–35.
Zhou, P., Kuang, F., & Cheng, Y. M. (2010). Generalized projective synchronization for fractional order chaotic systems. The Chinese Journal of Physics, 48, 49–56.
Deng, W. H. (2007). Generalized synchronization in fractional order systems. Physical Review E, 75, 056201.
Zhou, P., Cheng, X. F., & Zhang, N. Y. (2008). Generalized synchronization between different fractional-order chaotic systems. Communications in Theoretical Physics, 50, 931–934.
Zhang, X. D., Zhao, P. D., & Li, A. H. (2010). Construction of a new fractional chaotic system and generalized synchronization. Communications in Theoretical Physics, 53, 1105–1110.
Jun, W. M., & Yuan, W. X. (2011). Generalized synchronization of fractional order chaotic systems. International Journal of Modern Physics B, 25, 1283–1292.
Wu, X. J., Lai, D. R., & Lu, H. T. (2012). Generalized synchronization of the fractional-order chaos in weighted complex dynamical networks with nonidentical nodes. Nonlinear Dynamics, 69, 667–683.
Xiao, W., Fu, J., Liu, Z., & Wan, W. (2012). Generalized synchronization of typical fractional order chaos system. Journal of Computer, 7, 1519–1526.
Martínez-Guerra, R., & Mata-Machuca, J. L. (2014). Fractional generalized synchronization in a class of nonlinear fractional order systems. Nonlinear Dynamics, 77, 1237–1244.
Yi, C., Liping, C., Ranchao, W., & Juan, D. (2013). Q-S synchronization of the fractional-order unified system. Pramana, 80, 449–461.
Mathiyalagan, K., Park, J. H., & Sakthivel, R. (2015). Exponential synchronization for fractional-order chaotic systems with mixed uncertainties. Complexity, 21, 114–125.
Aghababa, M. P. (2012). Finite-time chaos control and synchronization of fractional-order nonautonomous chaotic (hyperchaotic) systems using fractional nonsingular terminal sliding mode technique. Nonlinear Dynamics, 69, 247–261.
Li, D., Zhang, X. P., Hu, Y. T., & Yang, Y. Y. (2015). Adaptive impulsive synchronization of fractional order chaotic system with uncertain and unknown parameters. Neurocomputing, 167, 165–171.
Xi, H., Yu, S., Zhang, R., & Xu, L. (2014). Adaptive impulsive synchronization for a class of fractional-order chaotic and hyperchaotic systems. Optik, 125, 2036–2040.
Ouannas, A., Al-sawalha, M. M., & Ziar, T. (2016). Fractional chaos synchronization schemes for different dimensional systems with non-Identical fractional-orders via two scaling matrices. Optik, 127, 8410–8418.
Ouannas, A., Azar, A. T., & Vaidyanathan, S. (2016). A robust method for new fractional hybrid chaos synchronization. Mathematical Methods in the Applied Sciences, 1–9.
Hu, M., Xu, Z., Zhang, R., & Hu, A. (2007). Adaptive full state hybrid projective synchronization of chaotic systems with the same and different order. Physics Letters A, 365, 315–327.
Zhang, Q., & Lu, J. (2008). Full state hybrid lag projective synchronization in chaotic (hyperchaotic) systems. Physics Letters A, 372, 1416–1421.
Hu, M., Xu, Z., Zhang, R., & Hu, A. (2007). Parameters identification and adaptive full state hybrid projective synchronization of chaotic (hyperchaotic) systems. Physics Letters A, 361, 231–237.
Tang, Y., Fang, J. A., & Chen, L. (2010). Lag full state hybrid projective synchronization in different fractional-order chaotic systems. International Journal of Modern Physics B, 24, 6129–61411.
Feng, H., Yang, Y., & Yang, S. P. (2013). A new method for full state hybrid projective synchronization of different fractional order chaotic systems. Applied Mechanics and Materials, 385–38, 919–922.
Razminia, A. (2013). Full state hybrid projective synchronization of a novel incommensurate fractional order hyperchaotic system using adaptive mechanism. Indian Journal of Physics, 87, 161–167.
Zhang, L., & Liu, T. (2016). Full state hybrid projective synchronization of variable-order fractional chaotic/hyperchaotic systems with nonlinear external disturbances and unknown parameters. The Journal of Nonlinear Science and Applications, 9, 1064–1076.
Manieri, R., & Rehacek, J. (1999). Projective synchronization in three-dimensional chaotic systems. Physical Review Letters, 82, 3042–3045.
Hu, M., Xu, Z., Zhang, R., & Hu, A. (2008). Full state hybrid projective synchronization in continuous-time chaotic (hyperchaotic) systems. Communications in Nonlinear Science and Numerical Simulation, 13, 456–464.
Hu, M., Xu, Z., Zhang, R., & Hu, A. (2008). Full state hybrid projective synchronization of a general class of chaotic maps. Communications in Nonlinear Science and Numerical Simulation, 13, 782–789.
Grassi, G. (2012). Arbitrary full-state hybrid projective synchronization for chaotic discrete-time systems via a scalar signal. Chinese Physics B, 21, 060504.
Ouannas, A., & Abu-Saris, R. (2016). On matrix projective synchronization and inverse matrix projective synchronization for different and identical dimensional discrete-time chaotic systems. Journal of Control Science and Engineering, 1–7.
Gorenflo, R., & Mainardi, F. (1997). Fractional calculus: Integral and differential equations of fractional order. In A. Carpinteri & F. Mainardi (Eds.), The book Fractals and fractional calculus, New York.
Caputo, M. (1967). Linear models of dissipation whose \(Q\) is almost frequency independent-II. Geophysical Journal of the Royal Astronomical Society, 13, 529–539.
Samko, S. G., Klibas, A. A., & Marichev, O. I. (1993). Fractional integrals and derivatives: theory and applications. Gordan and Breach.
Podlubny, I. (1999). Fractional differential equations. Academic Press.
Heymans, N., & Podlubny, I. (2006). Physical interpretation of initial conditions for fractional differential equations with Riemann-Liouville fractional derivatives. Rheologica Acta, 45, 765–772.
Matignon, D. (1996). Stability results of fractional differential equations with applications to control processing. In: IMACS, IEEE-SMC, Lille, France.
Li, Y., Chen, Y., & Podlubny, I. (2010). Stability of fractional-order nonlinear dynamic systems: Lyapunov direct method and generalized Mittag Leffler stability. Computers & Mathematics with Applications, 59, 21–1810.
Chen, D., Zhang, R., Liu, X., & Ma, X. (2014). Fractional order Lyapunov stability theorem and its applications in synchronization of complex dynamical networks. Communications in Nonlinear Science and Numerical Simulation, 19, 4105–4121.
Aguila-Camacho, N., Duarte-Mermoud, M. A., & Gallegos, J. A. (2014). Lyapunov functions for fractional order systems. Communications in Nonlinear Science and Numerical Simulation, 19, 2951–2957.
Ouannas, A., & Mahmoud, E. (2014). Inverse matrix projective synchro-nization for discrete chaotic systems with different dimensions. Intelligence and Electronic Systems, 3, 188–192.
Wang, X.-Y., & Zhang, H. (2013). Bivariate module-phase synchronization of a fractional-order lorenz system in diFFerent dimensions. Journal of Computational and Nonlinear Dynamics, 8, 031017.
Zhou, P., Wei, L. J., & Cheng, X. F. (2009). A novel fractional-order hyperchaotic system and its synchronization. Chinese Physics B, 18, 2674.
Liu, C., Liu, T., Liu, L., & Liu, K. (2004). A new chaotic attractor. Chaos Solitons Fractals, 22, 1031–1038.
Han, Q., Liu, C. X., Sun, L., & Zhu, D. R. (2013). A fractional order hyperchaotic system derived from a Liu system and its circuit realization. Chinese Physics B, 22, 6–020502.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this chapter
Cite this chapter
Ouannas, A., Azar, A.T., Ziar, T., Vaidyanathan, S. (2017). On New Fractional Inverse Matrix Projective Synchronization Schemes. In: Azar, A., Vaidyanathan, S., Ouannas, A. (eds) Fractional Order Control and Synchronization of Chaotic Systems. Studies in Computational Intelligence, vol 688. Springer, Cham. https://doi.org/10.1007/978-3-319-50249-6_17
Download citation
DOI: https://doi.org/10.1007/978-3-319-50249-6_17
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-50248-9
Online ISBN: 978-3-319-50249-6
eBook Packages: EngineeringEngineering (R0)