
Abstract
A method to extract macromodels for RF MEMS switches is proposed. The macromodels include both the coupled structural-electric behavior of the switch as well as its RF behavior. The device with distributed parameters is subject to several analyses from which the parameters of the macromodel are extracted, by model reduction. From the coupled structural-electrostatic analysis the parametric capacitance and the effective stiffness coefficients of the switch are extracted. From the RF characteristics in the up stable state, the transmission line parameters are extracted. Finally, all parameters are combined in a Spice circuit model, which is controlled by the MEMS actuation voltage and is excited with the RF signal. The procedure is applied to a capacitive switch. Relative modeling errors with respect to the non-reduced model, considered as reference, of less than 3 % for the RF characteristics and less than 1 % for the mechanical characteristics are obtained.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others
1 Introduction
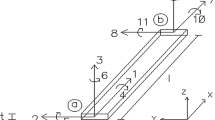
RF MEMS switches are devices containing electrostatic actuated movable parts with two stable states (up and down), used to allow or block the propagation of RF signals in various applications. They are based on micromachining technologies, being more suitable than solid electronic switching devices [1]. A typical capacitive RF switch contains an elastic bridge over a coplanar waveguide line (Fig. 1). The capacitance between the grounded bridge and the signal line, isolated with a dielectric layer is strongly dependent on the bridge position.

Typical capacitive RF switch of bridge type. Left—the movable part (membrane, or bridge) is placed transversely with respect to a coplanar wave guide RF signal line. Middle—the switch has two stable states: up and down. Right—the switch is used in an RF circuit, being able to allow the signal to pass (if it is in the up state), or block it (in down state)
The design of this device focuses not only on the RF performances (S parameters at the RF ports) in its stable states, but also on other relevant quantities (pull-in/out voltages at the actuation terminals, commutation time between the stable states) related to its switching from one stable state to the other. The investigation of the latter aspects needs multiphysics simulations since several physical effects (mechanical motion, air damping, electrostatic actuation) come together. Even since the early development of these devices, the computational challenges identified are the multiphysics modeling, required for the estimation of the switching properties, and the nonlinear macromodeling or the nonlinear order reduction, which is very important for the designers who need dynamical device level models. The effective macromodels should be accurate enough and have few degrees of freedom, and they have to be correlated to design parameters such as dimensions and material properties, with the aim of being embedded in system-level models [2]. The multiphysics modeling is still a difficult challenge [3]. A common approach for design is to use separate macromodels for the physical domains involved, depending on the investigated properties. The RF macromodels, consist of short sections of transmission lines (TLs) and R, L, C elements, and they are used to model the S-parameters of the switch in its stable states. The values of the capacitance are different for the down and up states. They are computed with simple formulas based on an uniform electrostatic field assumption as in [4], whereas R and L are computed from down-state simulations with an EM field solver and fitting of the obtained S parameters.
Circuit macromodels are also proposed for the multiphysics domain, as in [5], where large signal dynamic circuit simulation models for MEMS devices using controlled current sources are proposed and implemented in APLAC. The importance of device models at global level is that they can be combined and integrated into existing design environments [6]. Aspects related to the mixed-domain electromechanical and electromagnetic simulation of RF-MEMS devices and network are reported in [7]. The author develops and use lumped component models for elementary components such as the flexible beams and the rigid plates. The elements are implemented in the VerilogA programming language, within the Cadence IC development environment, the simulations being completed in Spectre. This strategy is discussed also in [8] where macromodels are derived using a hierarchical modeling approach that use the generalized Kirchhoff network theory. Combined techniques that derive both lumped and distributed components are used to obtain a fully coupled model described in a hardware description language. A MEMS component model library is offered by this team at http://rfmems.sourceforge.net/.
The goal of this paper is to obtain a combined macromodel, that includes both the multiphysics behavior and the RF behavior of the switch. For this, the device with distributed parameters is subject to several analyses from which the parameters of the macromodel are extracted, by model reduction. Finally, all parameters are combined in a Spice circuit model. The test used is the capacitive bridge-type switch proposed by Qian (Fig. 1) and its detailed description can be found in [9].
2 Multiphysics Macromodel
In order to change the stable state of the switch (e.g., from up to down), an electric voltage has to be applied between the central line and the membrane. The electric force that appears moves the mobile part until the mechanical contact is achieved; when the voltage is zeroed, the system moves back to the initial position due to the elastic forces in the membrane. During the movement, there is also a damping force due to the relative moment of the mobile plate with respect to the gas that surrounds it. It is obvious that the movement is non-uniform: the velocity is not constant, the acceleration is non-zero, so when writing equilibrium equations in a reference system attached to the mobile plate, an inertial force has to be considered. The most simple reduced order model appropriate for this coupled structural-electrostatic-fluid formulation corresponds to the equation of motion of a mobile plate of a parallel plate capacitor, suspended by a spring, when an actuation voltage is applied between its plates [1]:
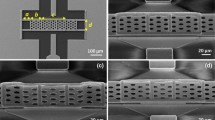
where m is the effective mass, b is the effective damping coefficient, k is the linear elasticity constant, k s is the nonlinear elasticity (spring) constant, F ES is the electrostatic force, which depends on the applied voltage u and the displacement of the membrane z. If the applied actuation voltage is not high enough, the electrostatic force might be not high enough to ensure the contact, but only to change the gap between the armatures. If the actuation voltage is higher than a certain value called pull-in voltage V pi then the mobile part collapses on the fixed part. The pull-in voltage is an important characteristic of a switch and therefore, it has to be caught by a multiphysics macromodel. When solving a set of static multiphysics coupled simulations, corresponding to increasing values of the applied actuation voltage, an instability occurs when the pull-in voltage is reached. Figure 2 shows the computational domain of a 2D model for the Qian switch [9] and the Dirichlet boundary conditions used by the multiphysics formulation.

2D Multiphysics domain: up—drawing at scale; down left—drawing not at scale, showing the geometric parameters: beam length L m = 280 μm; beam height H m = 0. 4 μm; dielectric thickness T d = 0. 1 μm; height of the RF signal line H cpw = 0. 4 μm; height of the RF signal line H gr = 4 μm; \(W_{\mathrm{cpw}} = W_{\mathrm{cpw1}} = 120\,\upmu\) m. For some postprocessing, the beam width W m = 280 μm is needed; down right—computational multiphysics domain and boundary/interface conditions
In order to extract the lumped effective parameters k and k s , it is enough that a set of static coupled (structural-electrostatic) finite element analysis simulations for several applied voltages u = V 0, be carried out for the model described above. Equation (1) written for the static case suggests the following extraction algorithm for the effective elastic coefficients:
-
1.
Do coupled static numerical simulations (e.g. FEM) for increasing values of the actuation voltage u. Record position z(u) and electrostatic energy W ES(u);
-
2.
Compute the dependence of the switch capacitance \(C(z) = 2W_{\mathrm{ES}}/u^{2}\), where u = u(z), on the membrane displacement. Approximate the dependence 1∕C(z) with a first order least square approximation c 1 z + c 2. The result of this step is shown in Fig. 3—left.
-
3.
Compute the dependence of the electrostatic force F ES(z) on the displacement by using the generalized force theorem \(F_{\mathrm{ES}}(z) = (u^{2}/2)\mathrm{d}\,C(z)/\mathrm{d}z\). Since the simulations at step 1 were static, this electrostatic force is equal to the elastic force that acts on the membrane.
-
4.
Do a cubic least square approximation of the dependence found at step 3 in order to find k and k s . A less accurate model can be obtained if the least square approximation is of order 1, meaning that k s is neglected. The result of this step is shown in Fig. 3—right.

Extraction of effective elastic coefficients from the multiphysics simulation: left—rational approximation of the capacitance; right—various possible approximations: linear or cubic least square; analytical evaluation of the elasticity coefficient is valid only for very small displacements
The SPICE circuit that synthesizes Eq. (1) in which the damping term is not considered is shown in Fig. 4. The actuation voltage is modeled by the independent voltage source V1. The behavioral current source B1 models the electrostatic force. The behavioral current source B2 models the elastic force. The current flowing through the mass capacitor is the inertial force. All the important mechanical and electric characteristics—displacement z(t), velocity v(t), capacitance C(z) and its derivative with respect to the displacement dC∕dz are voltages in this schematic. Scaled values have been used.

Equivalent SPICE multiphysics macromodel. The “currents” flowing through this model are forces. The displacement in μm is the voltage at node nd_sVal and is used by the source B2 to provide the elastic force. The velocity in μm/ms is the voltage at node nd_vVal. The capacitance of the switch is the voltage at node nd_CapVal. The derivative of the capacitance with respect to the gap is the voltage at node nd_derC and is used by B1 to provide the electrostatic force
The set of static simulations of this circuit are shown in Fig. 5 and reveal a relative error of the pull-in voltage with respect to its value from the FEM multiphysics model, of 3.55 % if a linear approximation of the elastic force is used, and a relative error of 0.82 % if a cubic approximation of the elastic force is used. The cubic approximation is not only very accurate for the pull in voltage, but also for all the dependence z(u).

Static simulations: FEM vs. SPICE equivalent macromodel
3 Mixed RF-Multiphysics Macromodel
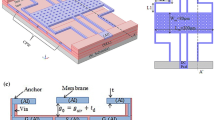
To allow the coupling with the rest of the RF circuit, the macromodel of the switch has to include both a model for the RF signal lines and a model for the switch itself. The signal lines are best described by transmission lines (TL) models, whereas for the switching part lumped components are used (Fig. 6). Thus, the resulting RF macromodel includes both distributed and lumped parameters. The transmission lines placed on both sides are considered identical, of length l, complex impedance Z c and complex propagation constant γ.

Typical RF macromodel. The switch model is represented by an admittance Y is synthesized by using lumped R, L, C series connected components
In order to extract the line parameters of the TLs, an EM full-wave simulation of the switch in the up position has been done, as described in [10]. Electromagnetic circuit element (EMCE) boundary conditions were applied to surfaces on the boundary of the domain that correspond to the RF terminals, and the mathematical model thus obtained was numerically discretized with the finite integration technique. From the frequency simulation of this numerical model the impedance transfer matrix Z is obtained. On the other hand, the analysis of the schematic in Fig. 6 in which TLs relationships are used leads to the following analytical expressions for the transfer impedance components:
From the multiphysics simulation discussed in the previous section, the dependence on z of the switch capacitance C was extracted. Assuming for the moment that we neglect R and L, the admittance needed in the formulas above is Y = jωC and it follows that the line parameters can be deduced quite straightforward from the formulas above. Values for the line parameters are obtained for every frequency, and an average value was computed for the frequency range of interest (Fig. 7).

EM simulation vs. mixed macromodel RF simulation: left—return loss (S 11 signal pass), right—insertion loss (S 21, signal pass)
The mixed macromodel is obtained by replacing the switch capacitance in the RF schematic by a model that connects it with the multiphysics macromodel, as in Fig. 8. A fixed capacitance has been added in parallel with the parametric one. It corresponds to the electric field lines that close through the substrate, and it has been computed by a separate electrostatic problem for the substrate. The validation of the model built so far is done by comparing the RF results (S parameters, where \(\mathbf{S} = (\mathbf{Z} - Z_{0}\mathbf{I})(\mathbf{Z} + Z_{0}\mathbf{I})^{-1}\), Z 0 being a reference impedance, according to http://eceweb1.rutgers.edu/~orfanidi/ewa/ch14.pdf) of the mixed schematic with the results from the EM simulation (Fig. 7). A relative error of 2.5 % in Frobenius norm is obtained.

Mixed macromodel: the RF part, the switch model is a current source controlled by the capacitance value that is taken from the multiphysics part (voltage at node n_CapVal in the multiphysics part of the schematic)
4 Conclusions
A mixed macromodel of a RF-MEMS switch, with few degrees of freedom, was extracted from several analyses of the device with distributed parameters. All parameters are combined in a single Spice circuit model, which is controlled by the MEMS actuation voltage and is excited with the RF signal. A relative error less than 3 % in the S parameters and less than 1 % in the pull-in voltage is obtained, which is very satisfactory given the low order imposed for the reduced model. Our future studies will continue, the next step being to improve the multiphysics part, by including damping and contact phenomena, in order that the macromodel be able to carry out RF simulations up to the down position as well as transient simulations needed for the extraction of switching time and pull-out voltage.
References
Rebeiz, G.M.: RF MEMS: Theory, Design, and Technology. Wiley, New York (2003)
Senturia, S.D., Aluru, N., White, J.: Simulating the behavior of MEMS devices: computational methods and needs. IEEE Comput. Sci. Eng. 16(10), 30–43 (1997)
Hannot, S.: Modeling strategies for electro–mechanical microsystems with uncertainty quantification. Ph.D. Thesis, Delft University of Technology (2010)
Muldavin, J., Rebeiz, G.: High-isolation CPW MEMS shunt switches—part 1: modeling. IEEE Trans. Microw. Theory Tech. 48(6), 1045–1052 (2000)
Veijola, T.: Nonlinear circuit simulation of MEMS components: controlled current source approach. In: ECCTD’01 - European Conference on Circuit Theory and Design, August 28–31, 2001, Espoo, Finland, vol. III, pp. 377–380 (2001)
Shafique, M., Virk, K., Menon, A., Madsen, J.: System-level modeling and simulation of MEMS-based sensors. In: 9th International Multitopic Conference, IEEE INMIC 2005, pp. 1–6 (2005)
Iannacci, J.: Mixed-Domain Fast Simulation of RF and Microwave MEMS-based Complex Networks within Standard IC Development Frameworks (2001). www.intechopen.com
Niessner, M., Schrag, G., Wachutka, G., Iannacci, J.: Modeling and fast simulation of RF-MEMS switches within standard IC design frameworks. In: International Conference on Simulation of Semiconductor Processes and Devices (SISPAD), 2010, pp. 317–320 (2010)
Qian, J.Y., Li, G.P., De Flaviis, F.: A parametric model of low-loss RF MEMS capacitive switches. Asia-Pacific Microwave Conference, APMC 2001, Taipei, Taiwan (2001)
Ioan, D., Ciuprina, G.: Reduced order models of on-chip passive components and interconnects, workbench and test structures. In: Schilders, W.H.A., van der Vorst, H.A., Rommes, J. (eds.) Model Order Reduction: Theory, Research Aspects and Applications, vol. 13, pp. 447–467. Springer, Heidelberg (2008)
Acknowledgements
The financial support of the Romanian Government program PN-II-PT-PCCA-2011-3, no. 5/2012 and of the Sectoral Operational Programme HRD 2007–2013 of the Ministry of European Funds through POSDRU/159/1.5/S/132395 is acknowledged.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing Switzerland
About this paper
Cite this paper
Ciuprina, G. et al. (2016). Mixed Domain Macromodels for RF MEMS Capacitive Switches. In: Bartel, A., Clemens, M., Günther, M., ter Maten, E. (eds) Scientific Computing in Electrical Engineering. Mathematics in Industry(), vol 23. Springer, Cham. https://doi.org/10.1007/978-3-319-30399-4_4
Download citation
DOI: https://doi.org/10.1007/978-3-319-30399-4_4
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-30398-7
Online ISBN: 978-3-319-30399-4
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)