
Abstract
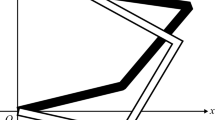
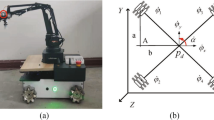
With the superiority of owning more degrees of freedom than ordinary robot manipulators, redundant robot manipulators have gotten much attention in recent years. In order to control the trajectory of the robot end-effector with a desired velocity, it is very popular to apply the inverse kinematics approaches, such as pseudo-inverse scheme. However, calculating the inverse of Jacobian matrix requires a lot of time. Thus base on gradient neural dynamics (GND), an inverse-free scheme is proposed at the joint-velocity level. The scheme is named G1 type as it uses GND once. In addition, two path tracking simulations based on five-link and six-link redundant robot manipulators illustrate the efficiency and the accuracy of the proposed scheme. What is more, the physical realizability of G1 type scheme is also verified by a physical experiment based on the six-link planar redundant robot manipulator hardware system.
Access provided by Autonomous University of Puebla. Download to read the full chapter text
Chapter PDF
Similar content being viewed by others

References
Van, M., Kang, H.-J., Ro, Y.-S.: A robust fault detection and isolation scheme for robot manipulators based on neural networks. In: Huang, D.-S., Gan, Y., Bevilacqua, V., Figueroa, J.C. (eds.) ICIC 2011. LNCS, vol. 6838, pp. 25–32. Springer, Heidelberg (2011)
Lee, S.C., Ahn, H.S.: Multiple manipulator cooperative control using disturbance estimator and consensus algorithm. In: American Control Conference, pp. 4002–4007. IEEE Press, San Francisco (2011)
Kim, C.S., Mo, E.J., Jie, M.S., Hwang, S.C., Lee, K.-W.: Image-based robust control of robot manipulators under jacobian uncertainty. In: Huang, D.-S., Heutte, L., Loog, M. (eds.) ICIC 2007. LNCS, vol. 4681, pp. 502–510. Springer, Heidelberg (2007)
Zhou, J., Kang, H., Ro, Y.: Comparison of the observability Indices for robot calibration considering joint stiffness parameters. In: Huang, D.-S., McGinnity, M., Heutte, L., Zhang, X.-P. (eds.) CCIS 2010, CCIS. vol. 93, pp. 372–380. Springer, Heidelberg (2010)
Liu, Y., Yu, Y., Jiang, C.: The Development of Redundant Robot Manipulators. Machine Design and Research 19(1), 24–27 (2003)
Dubey, R., Luh, J.: Redudant Robot Control for Higher Flexibility. In: IEEE International Conference on Robotics and Automation, pp. 1066–1072. IEEE Press, Raleigh (1987)
Zhang, Y., Wang, J.: A Dual Neural Network for Redundancy Resolution of Kinematically Redundant Manipulators Subject to Joint Limits and Joint Velocity Limits. IEEE Transactions on Neural Networks 13(3), 658–667 (2003)
Bianco, C., Ghilardelli, F.: Real-Time Planner in the Operational Space for the Automatic Handling of Kinematic Constraints. IEEE Transactions on Automation Science and Engineering 11(3), 730–739 (2014)
Moreno, J., Kelly, R.: Manipulator velocity field control with dynamic friction compensation. In: 42nd IEEE Conference on Decision and Control, pp. 3834–3839. IEEE Press, Hawaii (2003)
Cheng, L., Hou, Z., Tan, M.: Adaptive Neural Network Tracking Control for Manipulators with Uncertain Kinematics, Dynamics and Actuator Model. Automatica 45(10), 2312–2318 (2009)
Cheah, C., Kawamura, S., Arimoto, S.: Stability of Hybrid Position and Force Control for Robotic Manipulator with Kinematics and Dynamics Uncertainties. Automatica 39(5), 847–855 (2003)
Cheng, L., Hou, Z., Tan, M., Lin, Y., Zhang, W.: Neural-Network-Based Adaptive Leader-Following Control for Multiagent Systems with Uncertainties. IEEE Transactions on Neural Network 21(8), 1351–1358 (2010)
Tarokh, M., Kim, M.: Inverse Kinematics of 7-DOF Robots and Limbs by Decomposition and Approximation. IEEE Transactions on Robotics 23(3), 595–600 (2007)
Falco, P., Natale, C.: On the Stability of Closed-Loop Inverse Kinematics Algorithms for Redundant Robots. IEEE Transactions on Robotics 27(3), 780–784 (2011)
Tchon, K.: Optimal Extended Jacobian Inverse Kinematics Algorithms for Robotic Manipulators. IEEE Transactions on Robotics 24(6), 1440–1445 (2008)
Jin, L., Zhang, Y.: G2-Type SRMPC Scheme for Synchronous Manipulation of Two Redundant Robot Arms. IEEE Transactions on Cybernetics 45(2), 153–164 (2015)
Zhang, Y., Yi, C., Guo, D., Zheng, J.: Comparison on Zhang Neural Dynamics and Gradient-Based Neural Dynamics for Online Solution of Nonlinear Time-Varying Equation. Neural Computing and Applications 20(1), 1–7 (2011)
Zhang, Y.-N., Yi, C., Ma, W.: Comparison on gradient-based neural dynamics and zhang neural dynamics for online solution of nonlinear equations. In: Kang, L., Cai, Z., Yan, X., Liu, Y. (eds.) ISICA 2008. LNCS, vol. 5370, pp. 269–279. Springer, Heidelberg (2008)
Bowling, M., Veloso, M.: Convergence of gradient dynamics with a variable learning rate. In: 18th International Conference on Machine Learning, pp. 27–34. Morgan Kaufmann, Williamstown (2001)
Ma, X., Elia, N.: A distributed continuous-time gradient dynamics approach for the active power loss minimizations. In: 51th Annual Allerton Conference, pp. 100–106. IEEE Press, Illinois (2013)
Taylor, P., Day, T.: Evolutionary Stability under the Replicator and the Gradient Dynamics. Evolutionary Ecology 11(5), 579–590 (1997)
Zhang, Y., Li, Z., Guo, D., Ke, Z., Peng, C.: Discrete-Time ZD, GD and NI for Solving Nonlinear Time-Varying Equations. Numerical Algrithms 64, 721–740 (2013)
Zhang, Y., Luo, F., Yin, Y., Liu, J., Yu, X.: Singularity-conquering ZG controller for output tracking of a class of nonlinear systems. In: 32nd Chinese Control Conference, pp. 477–482. IEEE Press, Xi’an (2013)
Zhang, Y., Yin, Y., Wu, H., Guo, D.: Dynamics and gradient dynamics with tracking-control application. In: 5th International Symposium on Computational Intelligence and Design, pp. 235–238. IEEE Press, Hangzhou (2013)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer International Publishing Switzerland
About this paper
Cite this paper
Zhang, Y., He, L., Ma, J., Wang, Y., Tan, H. (2015). Inverse-Free Scheme of G1 Type to Velocity-Level Inverse Kinematics of Redundant Robot Manipulators. In: Hu, X., Xia, Y., Zhang, Y., Zhao, D. (eds) Advances in Neural Networks – ISNN 2015. ISNN 2015. Lecture Notes in Computer Science(), vol 9377. Springer, Cham. https://doi.org/10.1007/978-3-319-25393-0_12
Download citation
DOI: https://doi.org/10.1007/978-3-319-25393-0_12
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-25392-3
Online ISBN: 978-3-319-25393-0
eBook Packages: Computer ScienceComputer Science (R0)