
Abstract
Dielectric elastomers (DEs) are one of the leading electroactive polymer (EAPs) technologies used for actuation application. These elastomers possess the benefits of large strain and stresses, easy processability, fast speed, recovery, efficiency long life, and reliability. Due to their inherently low dielectric constant, nanofillers are introduced into these elastomers to raise their dielectric constant for increased energy storage and large strain. Enhancement in dielectric constant is largely influenced by the surface functionalization of the nanofiller and structural design of the nanocomposites. In this chapter, we will review the recent developments regarding, the fabrication, characterization, and applications of dielectric elastomer-based nanocomposites.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
8.1 Introduction
Dielectric elastomers (DEs) are multi-functional, incompressible, stretchable, highly extensible, and soft poly-active polymer structures [1, 2]. DEs act basically on a transduction mechanism. Being electromechanical transducers, DEs can convert electrical energy to mechanical energy; however, they act as reversible transducers, converting mechanical energy into electrical one as well. Dielectric elastomer actuators (DEAs), undergoing this reversible operation, are said to be working in electromagnetic transduction-based generator mode [3, 4]. No doubt, DEs are seen to compete for actuators being used in many latest systems such as loudspeakers, cars, washing machines, and computers. DEAs are also named ‘artificial muscles’ [1, 5] and can be employed in the formation of soft robots [1, 6]. Large actuation strain, high specific energy density, low density, and low modulation make DEs superior over conventional actuation technologies such as electrostrictive, shape memory, piezoelectric, and magnetostrictive materials [4]. Over a decade ago, it was discovered that dielectric elastomers show about 100% strain by the influence of an electric field [1, 7]. As sensors, they are employed to monitor pressure and strain [1, 8,9,10]. Along with this special characteristic, DE also exhibits low cost, low operation noise, lightweight, fast response, etc.; leading to its application in different fields as a transducer [10, 11]. Thus, DEs find vast applications in the fields of soft robotics [12,13,14], energy harvesting [15, 16], artificial muscles [17, 18], haptic interfaces [19,20,21], and tunable lenses [22, 23].
8.2 Working Mechanism of Dielectric Elastomer
The charged particles present in matter move with an applied voltage. As compared to a conductor, charged particles show movements over small distances in dielectric materials; where two coupled processes, i.e., polarization and deformation can be observed. All dielectric materials are electroactive, i.e., in an electric field, they change shape or size [10].
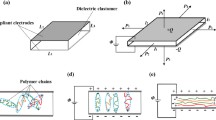
The basic structure of DEA comprises a soft elastomer membrane sandwiched between two compliant electrodes. When a voltage is applied to the electrodes, an electric field is generated. The presence of electrostatic force and induced Maxwell stress causes a decrease in thickness and expansion in the area of the membrane, as reported by Rontgen in 1880 [2]. The pre-strain behavior of DEs plays an important role; (i) thinning of the film occurs in the width direction (ii) creation of large electric field strength by applying a low voltage (iii) orientation of pre-strained elastomer in such directions which improve its resistance toward electric voltage [24]. Actuation mechanisms in DEAs are reported by the SRI International group when they used polyimide and silicone rubber layers to synthesize a bending actuator in 1998 [25] and showed 100% actuation strain in a DEA prepared using a pre-stretched acrylic elastomer [26]. This discovery gathered the attention of researchers to use DEAs in artificial muscle technology [27, 28].
When observed more closely, it was found that when a power source via a conducting wire is connected to the electrodes, a partial leakage of electric current from the conducting wire can be noted, adding charges to the electrodes partially. The presence of opposite charges on both electrodes creates polarizability in the dielectric material. The forces of attraction between these opposite charges expand the membrane but cause a decrease in its thickness; in this way, DE acts as an actuator. However, when the DE membrane is pre-stretched and pre-charged and then undergoes relaxation in the circuit, the voltage between the electrodes is boosted, and the DE acts as a generator [29, 30]. For the best understanding of DEs, refer to Fig. 8.1 [28].

8.2.1 DE Materials
To achieve better efficiency of DEAs, dielectric elastomers with high electrical breakdown strength, low viscosity, low modulus, and high dielectric constant must be used. Employment of several materials with such properties has been reported by researchers; including fluoroelastomers [31], styrene-ethylene-butylene-styrene [32], natural rubber [33], polyurethanes (PUs) [34], silicones [35], and acrylates [8]. Out of these, the last three materials are the most promising ones [36].
-
a.
Polyurethane
Owing to the presence of polar urethane groups, the higher dielectric constant value (up to 7) of polyurethane (Pus) enables them to work in DEAs at a low electric field. On the contrary, polarity in the groups also leads to a lower breakdown strength [36, 37].
-
b.
Silicones
For the synthesis of DEAs, the most widely used silicone is polydimethylsiloxane (PDMS); which has a low viscosity loss, high conversion efficiency, long life span, fast response rate, weak intermolecular forces, longer bond lengths of the basic unit, i.e., Si–O, and higher flexibility [36, 37].
-
c.
Acrylates
Low price, better adhesive properties, and good performance of commercially available adhesive tapes (VHB 4905/4910) make them excellent candidates to be used in DEAs. Pre-stretched acrylate materials show exceptionally high breakdown strength. However, acrylate-based DEAs have poor adaptability as compared to silicone rubber-based DEAs [8, 36].
8.2.2 Electrodes Used in DE-Based Devices
The functionality of DE-based machines is also affected by the electrodes being used in the formulation of DEAs. The use of stable, highly conductive, strongly adhesive, and good compliancy electrodes results in better working of DEAs. Carbon nanotubes (CNTs), carbon grease, graphite, and carbon powder are the most commonly available choices used for electrodes for this purpose [38,39,40]. Being cheap, easily accessible, and highly compatible, carbon grease is widely used, but it dries out after a long time. Graphite and carbon black are thin and easily applicable to the membrane’s surface, so more suitable to be used in multi-layers stacked DEAs. There is also a drawback in using these electrodes; when a high strain is applied, the contact between the powders is lost, reducing the conductivity values. The high transparency and conductivity of silver nanowires, self-healing, and optical transparency of ionic conductors make them applicable as electrodes in DEAs which are then employed in optical devices [41, 42].
8.2.3 Deformation of Dielectric Elastomer
A thin membrane is unstable and undergoes different morphological patterns such as buckling, crumpling, and wrinkling. If it is compressed by applying strain on boundaries, it undergoes buckling. If uniaxial tensile strength is applied to the membrane, it undergoes wrinkling. Wrinkling and buckling can be seen when the membrane undergoes non-uniform shrinkage. If we stretch the membrane over a liquid drop, symmetrical breakage can be observed leading to crumpling or wrinkling. In the case of DE, where a thin membrane of elastomer is sandwiched between two compliant electrodes; when the applied voltage reaches a particular value, the membrane exhibit instabilities [43].
As DE interconverts electrical and mechanical energies, polymer and electrodes must contract and stretch together [3]. For a considerable deformation of DE, electrodes made up of softer objects with a relatively lower mechanical stiffness, such as carbon grease should be used. By applying a voltage, charged particles begin to flow from one electrode of a transducer to the other. The presence of opposite charges on both electrodes causes the structure to expand in the plane and compress in thickness, leading to deformation in the DE [1, 10].
8.2.4 Configurations of Dielectric Elastomers
Based on the working mechanism of DEs, they are employed to create different configurations of DEAs such as zipping [44], multilayer stacked [45], rolled [46], balloon [47], cone-shaped [48], folded [49], hinge [50], rotary [51], bending [52], and planar [53].
The simplest DEA structure is single-layered. However, deformation in uni-layered structures is too small to be utilized, so multi-layered stacking of DEs can be done to increase the deformation effect in them [54]. As reported by Kovacs and co-workers, increasing the number of DE layers causes difficulty in the synthesis of DEA. This problem was solved by the introduction of an automated process to fabricate DEA with reproducible properties [55]. Fiber-stiffened multi-layered stacked DE sheets can be used to produce a rolled DEA. DE membrane inflated into a balloon can achieve a high area strain and thus can be used in trigger actuators and volume fluid pumps. Rossiter and co-workers [56] presented a cone-shaped DEA; the applied voltage reduces the tension and causes expansion of the DE membrane and it is deformed in the direction of bias force. A double-conical DEA configuration was also formulated by Wang et al. [36]. In the form of an active hinge, DEA was prepared, where a pre-stretched DE membrane is attached on both sides of a hinge support structure [50]. On applying voltage on one side, the hinge structure rotates to the opposite side due to the reduction in the stress of the membrane. Although DEs are nowadays in limelight to be used in the development of soft robots, however, a rigid framework is not much favorable. So, self-organized dielectric elastomer minimum-energy structures (DEMES) are introduced by Kofod et al. [57], where DE is attached to a thin framework of a flexible polymer, releasing a low amount of energy while regaining their original position.
8.2.5 State of Equilibrium in DE
Four different variables affect the state of equilibrium in a DE-based transducer: voltage, force, charge, and displacement. Two of these states are dependent on the properties of the DE, while the other two can be varied according to the requirements. For example, in an electromechanical system of DE, transducer, force, and voltage are variable, and it takes time to gain a state of equilibrium according to its capability of charge polarization and kinematic deformation. The whole process is called ‘relaxation’. The time required to achieve this new state of deformation is said to be viscoelastic relaxation time. The process of relaxation can also be explained in terms of the entangled polymer chains responding to the force applied to DE. In elastomers, a polymer network is formed, where flexible polymer chains are interconnected; they may coil or twist or entangle with each other. Applying a force to DE can cause sliding or localized slipping of these entangled chains, resulting in the relaxation of the elastomer. In response to voltage, polarity is created in the elastomers; the molecular dipoles re-orient themselves, causing dielectric relaxation in DE material. This process involves rotation and localized translation of molecules [29, 31, 58].
When a power source is connected to the dielectric material, current leakage takes place, i.e., transport of ions, electrons, or both causes a small current to flow through the material. The density of this current leakage depends upon the applied field; it increases with the increasing applied field [58, 59].
8.2.6 Theories for Dielectric Elastomer-Based Actuators
The shrinkage in the size of the elastomer by applying a voltage across its electrodes is the result of Maxwell stress (interaction between quasistatic electric charges). The Maxwellian formula is derived based on a basic model of materials, assuming: (i) electrode materials have an infinity value of conductivity and zero elastic modulus, (ii) there is ignorable current leakage and dielectric loss, (iii) the elastomer used is perfectly elastic and exhibit very low loss modulus, (iv) the polymer used is isotropic, (v) both elastomer and electrodes are incompressible, and (vi) elastomer shows a constant value of elastic modulus [59, 60].
The application of DEs in actuators is limited by the low dielectric permittivity of the elastomer being used in the actuator. So, Maxwell stress can be improved by increasing its permittivity values [61].
8.3 Applications of Dielectric Elastomers
8.3.1 Actuators
High flexibility and capability to show large deformations allow DEs to be employed in the formulation of actuators such as tapered drivers, diamond drivers, folding drivers, and cylindrical drivers [36]. A bionic robot is made by Li et al. [12] using acrylic (3 M VHB) as the dielectric elastomer. The two flexible electrodes used are (i) surrounding water and (ii) conductive ion gel. Water drawing was achieved by using mechanical sections of DE material. Silicone rubber is used as a water-impermeable encapsulant. Another kind of DEA was fabricated by Jun et al. [62] to control surface wettability. VHB 4905 was the DE material used; carbon black was used as the flexible electrode. Electromechanical instability (EMI) phenomenon was employed in making this actuator. Wrinkling was observed in DE after relaxation time. Deformation of the material can be controlled by changing voltage and thus wettability can be adjusted accordingly [60].
8.3.2 Generators
Dielectric elastomers are known to interconvert electrical and mechanical energy; hence, they can also be used to generate electricity. Energies from different sources such as blowing wind, waves of an ocean, walking of humans, and flowing eaters can be harvested using DEs [36, 63]. A generator to harvest energy from the motion of human bodies that can run low-consumption systems was formulated by Jean-Mistral and co-workers [64]. Energy from the human body, being cost-free, stable, and green energy, is advantageous over the other forms of energy. A heel generator consisting of a multi-layered DE membrane was developed by Stanford Institute (SRI) in the United States; this generator uses the effect of a heel to generate electric power. 0.8 J energy can be generated per step while walking. Its better illustration is given in Fig. 8.2 [63].

Kornbluh et al. [66] formulated a wave energy harvesting device that can be actuated by water wave fluctuations; DE units employed in this device are disc-shaped, floating on the sea and converting wave energy into electricity.
8.3.3 Sensors
DEs-based sensors find their applications in the field of biomedicine, helping in the detection of prosthetic pressure, thus improving its comfort level [67]. DEs-based pressure sensors, bending sensors, and tension sensors have been developed by New Zealand Stretch Sense Company [36].
8.3.4 Soft Robots
Gripping objects of different types, sizes, and shapes is one of the biggest challenges in the formulation of soft robots; this problem is being resolved by the use of DEAs. Light weighted and greater capability to deform can be achieved by self-organization of the flat state of DEMES into an out-of-plane complex structure. DEMES-based tulip-shaped soft gripper; based on a push–pull configuration; that opens to hold an object when subjected to an electric field was fabricated [68]. A multi-segmented gripper is also formulated by Araromi and co-workers; the multiple segments allow the gripper to envelop objects of different shapes and sizes [69]. Moreover, Shian et al. showed that the integration of stiff fibers can induce bending and wrapping, providing aid in gripping objects [70]. DE balloons can also be utilized as a hydraulic source in the making of grippers in soft robots.
The first biomimetic walking robot was prepared by Eckerle and co-workers [8]; DEA used in this robot named FLEX has six legs with two degrees of freedom at each leg. However, the walking speed of this robot was too slow. Spring roll actuators were used to make a six-legged robot. Inspired by crawling natural creatures, crawling robots have also been made along with legged robots [71]. Electronic components are integrated into the feet of these robots, whose actions move them stably in forward and backward directions [72]. A tethered robot that can climb a wall is also made [73]. In the soft crawling robot formulated by Li et al. [74], oriented plastic fibers in the form of a bundle are attached at both ends of the actuators; these bundles provide a fraction to the robot. Later on, the artificial nervous system was also integrated into a caterpillar-like crawling soft robot [75].
Hopping robots, jumping robots, flying robots, swimming robots, and humanoid robots are also being designed using DEAs.
8.4 Dielectric Elastomer-Based Nano Composites
No doubt, dielectric polymer materials are wonderful materials because of their ease in processibilities and high flexibilities but their use is limited because of low dielectric constant value and low thermal stabilities. No single component possesses the multidimensional properties required for functional materials employed in the recent day’s technology. Nanoparticles, ceramics, Mxene, and carbon-based materials (carbon nanotubes, graphene oxide, reduced graphene oxide, etc.) are famous for their excellent electrical, mechanical, and thermal properties and are incorporated as filler in polymer matrix for the synthesis of polymer nanocomposites, a system, with excellent multidimensional features. Such dielectric elastomer-based nanocomposites (DENC) have extensive applications because of excellent conductivity and remarkable dielectric constant values with ultra-low tangent loss and high flexibility on the addition of a minor quantity of fillers.
8.4.1 Fabrication of Dielectric Elastomer-Based Nanocomposites
Synthesis and designing of DENC because of their extensive applications have been the subject of a great number of research works reported in the last two decades. Solution mixing method, melt blending method, in situ polymerization, and injection molding are often used because of their unique features and advantages.
-
a.
Solution mixing method
The solution mixing method is one of the simple, cost-effective, and less time-consuming methods. In this approach, two main components of the composites (filler and matrix) are mixed or dispersed in the same or two miscible solvents in two separate containers followed by their mixing with the help of some external force like sonication, mechanical mixing, etc. For the preparation of dielectric polymer composites, in most cases, the solvent selection is based on the ability of the dissolving polymer matrix to disperse fillers and its non-reactive nature, and ease in removal of the solvent after the formation of the composites. This method is one of the commonly used methods since no sophisticated instruments or apparatus is required for this. The solution mixing method is not recommended for polymers that do have not good solubility in a solvent with low boiling points. In that case, the removal of the solvent becomes tedious. Usually, ultrasonication is considered a very effective tool for the good dispersion of MWCNTs and graphene-related materials in water and other common organic solvents. It helps in breaking the agglomerates into separate entities. It is reported that extensive or powerful sonication sometimes leaves adverse effects which could result in a lowering of the aspect ratio of fillers like multi-walled carbon nanotubes. Synthesis of the polymer composites is not possible for polymers that are not well soluble in solvents with low boiling points. The solution mixing method can be used with slight modification to have better results depending upon circumstances. AmronsakChankul and co-workers [76] prepared Zn+2/ZnO-based polydiacetylene composites [Zn+2/ZnO/PDA)] through the solution mixing method with a slight alteration. After mixing all the precursors, they kept the mixture for incubation at room temperature for different time intervals ranging from 0.5 to 24 h and from 4 to 70 °C overnight. After incubation, each sample was irradiated by UV light to evaporate the solvent. They studied the effect of incubation temperature and time on the size of the prepared nanocomposites.
-
b.
Melt blending method
It is also a mixing method as discussed in the previous section. In this method, the filler is forced to mix with the help of some external force in the already melted polymer, or a mixture of fillers and polymer matrix is fed into the heating chamber for melting. Melt blending is a solvent-free method and an environment-friendly one. This method is considered one of the best methods for polymers that have solubility issues and low melting points. The melt blending method is strongly recommended for large-scale synthesis of the composites. On the other hand, this method is not considered as economical one as the solution mixing method. The use of this method is not suitable for the micro-level synthesis of the composites. A major limitation of this method is the synthesis of the composite of thermoset polymer as a matrix. At different places in the literature, it is observed that the melt bending method was used with slight modification for the synthesis of DENC with desired features. The melting process is carried out in a sealed environment at ultra-low pressure followed by quenching in ice-cold water. Such melt blending method is also known as the melt quenching method [77]. In the recent years, the use of two immiscible polymers as a matrix to obtain carbon-related materials based on DENC with improved and unique dielectric properties is becoming a hot trend [78,79,80]. The mechanism behind the achievement of high dielectric constant and low tangent loss is the controlled migration of the MWCNTs in the interface of the immiscible polymers. For this purpose, various combinations of immiscible polymers like polystyrene-polymethylmethacrylate, polyvinylidene fluoride-poly acetic acid, etc., can be used to control the migration of fillers across the interface of their unfavorable and favorable polymers. For the synthesis of DECN using two immiscible polymers, the melt blending method is considered the most convenient approach.
-
c.
In situ polymerization method
In situ polymerization method for the synthesis of the dielectric polymer composites is the best choice for polymers with high melting points and have solubility issues in commonly used low boiling point solvents [81]. In this mode of preparation of composites, polymerization of the polymer matrix has been carried out in the presence of the filler. This method is very commonly used because of its excellent outcome in terms of highly uniform dispersion of the filler in the matrix. It is one of the economical methods like the solution mixing method for the preparation of composites as no sophisticated instrumentation is required. When a series of composites are needed to be prepared with different concentrations of fillers, to study the effect of the contents of filler, this method is not considered as reliable as the solution mixing method and melt blending method. Polymerization is very much sensitive to the experimental conditions as far as the molecular weight and structure of the polymer are concerned. Any difference in molecular weight and structure of polymer for different composites with different filler contents may influence the features of composites which leads to a wrong conclusion regarding the study of the effect of filler contents. This method is also not considered the best available choice when a composite of two immiscible polymers is required to be prepared.
-
d.
Injection molding method
The injection molding method is considered one of the best methods to prepare DENC in any shape using a mold of a particular shape. The basic strategy of this method is analogous to the melt mixing method. A polymer containing the filler is heated above its melting point and the filler gets dispersed in this molten form with less viscosity. Finally, this melt is injected mechanically into a mold, where it gets cool down to give composites of the desired shape. The injection molding method is the most commonly used one for the industrial-scale production of composites. This method is only limited to thermoplastic polymer for the synthesis of the composites. Through control of the alignment of MWCNTs in composites prepared by injection molding method, tuning the dielectric properties of composites is a very reliable approach [82]. The injection molding method can be used in a versatile way and with the combination of the other techniques to have desired results in polymer composites. Physical foaming combined with the injection molding method for the synthesis of the composite will facilitate the generation of interesting microstructures which are desired to have required features in the composites [83]. A brief data of the synthesis method of the DENC with their claimed values of dielectric constant and dielectric loss is given in Table 8.1.
8.4.2 Types of Fillers Used
Different kinds of fillers are being used in the formulation of DENC, mainly divided into two types:
-
a.
Ceramics
-
b.
Conductive fillers
The above-mentioned fillers are of great importance, due to an effective polarization formed between filler layers and polymer matrix [92, 93].
-
a.
Ceramics
Extremely high permittivity values of ceramics such as BaTiO3 [35, 94] and TiO2 [35, 95] as compared to the polymer matrix, in which they are incorporated, make them an excellent candidate to be used in DENC. The incorporation of ceramics in DE composites improves their electrical properties to a great extent. The requirement of a relatively greater amount of filler in this case endangers the value of breakdown voltage and flexibility of the composite, making it less flexible. On the other hand, conductive fillers are more appealing to be used in DENC as the product composite is easily processible and exhibits high flexibility. Moreover, these fillers are required in a lesser amount as compared to ceramic-based composites. Although, the use of conductive fillers results in a huge increase in the dissipation of electrical and mechanical energy; affecting the stability and lifetime of the composites in which they are used [59].
-
b.
Conductive fillers
The mostly employed conductive fillers include carbon black [96], carbon nanotubes [97], graphene [59], metal nanoparticles [98], etc. It is observed that metal nanoparticles used as fillers are less effective as compared to carbon-based nanofillers; based on the fact that polymer matrix has more affinity with carbon-based nanofillers.
Recently, 1D (one-dimensional) and 2D (two-dimensional) carbon-based nanofillers have grabbed much attention from researchers since they fabricate composites with high dielectric permittivity. These fillers form a percolative network through the polymer matrix and thus improve the electric properties of the composites drastically. The percolation threshold value for the composite is greatly affected by the geometric factors of filler particles and their affinity with the matrix at the interface. Graphene nanosheets (2D) have a unique structure, i.e., a highly stable planar honeycomb made by single-atom thick sp2 C-atoms imparting remarkable electron mobility, a very high surface area, excellent electrical conductivity, and the sheets can easily contact with each other as compared to CNTs, thereby graphene nanosheets are known to have a lower percolation threshold value [99]. A relatively lower breakdown strength, high dielectric loss, and vast mechanical hysteresis caused due to the leakage of current between the conductive channels of graphene sheets formed in the polymer matrix are the main drawbacks to using graphenes, chemically different graphene-related materials such as graphene oxide and reduced graphene oxide for the fabrication of graphene/DEA composites. Thus, the synthesis of a stable and improved graphene-based DENC is one of the most notable fields that is being increasingly reported over time.
The actuation behavior of the graphene-based polymer composite can be improved by seeking a solution to the above-mentioned problems, e.g., functionalization of graphene components or limiting the dielectric loss by decorating them with an insulating layer, hence, improving the compatibility between the conductive fillers and matrix components [59].
8.4.3 Factors Affecting the Functionalization of Composite
-
a.
Route used to synthesize the filler
The synthesis technique used to fabricate fillers (e.g., graphene nanosheets) has a dramatic influence on the properties of the final product; top-down and bottom-up being the most-preferable ones [100, 101]. On the other hand, bottom-up technique, synthesis on SiC surface [102], and mechanical exfoliation [103] are not suitable methods to synthesize graphene which is to be used in composites due to high cost and partial scalability [104]. Low yield, comparatively lower yield, and high cost of graphene nanosheets synthesized through chemical vapor deposition of hydrocarbons are not much recommended for this purpose [105]. Owing to the low-cost processability and high scalability of the liquid phase, exfoliation is a better suitable process [104]. Despite the lower quality of graphene obtained through the reduction of graphene oxide (GO), controlled costs and higher yield make this route a good choice for the production of graphene nanosheets which are to be incorporated into composites [106]. Hence, the most effective routes to be used for the synthesis of commercial graphene nanosheets are liquid phase exfoliation and reduction of GO.
-
b.
Functionalization of the filler
Modification of the fillers being employed, e.g., uniform dispersion or deagglomeration, surface modification, ways to enhance the strength of matrix-filler interaction, synthesis of core–shell structures, use of complex fillers, etc., plays an important role in the functioning of the composite [107, 108]. Several chemicals (covalent) [109] and physical (non-covalent) [110] techniques have been employed to achieve these functionalized fillers. Covalent functionalization includes the organization of π-cloud for the conversion of sp2 carbon network into sp3 hybridized carbon [111]. On the other hand, non-covalent functionalization includes the use of electrostatic forces, Van der Waals forces, π-π interactions, physisorption, etc.; resulting in the formation of electron–hole puddles and causing changes in the doping density [112]. Preferably, functionalization methods mentioned later (non-covalent) are capable to stop the leakage of current, thus increasing the dielectric permittivity and allowing controllable energy dissipation. Hence, non-covalent modification is more favorable to synthesizing highly efficient nanofillers incorporated composites [113].
-
c.
Content of filler in the composite
Increasing the carbon to oxygen ratio of the filler results in a better elastic modulus and improved dielectric permittivity. The growth rate of elastic modulus is lower as compared to dielectric permittivity. However, higher contents of filler cause a decrease in electrical breakdown strength [59].
-
d.
Interactions between matrix and filler
The electromechanical properties and microstructure of a composite are greatly affected by interactions between matrix and filler particles. For instance, coating of hydrophilic, less toxic, and stable TiO2 on hydrophobic reduced graphene oxide (rGO) improves its surface wettability, (TiO2 acts as an insulator controlling the current leakage inside the composite) causing better interactions between the filler and matrix, resulting in greater storage capability and loss modulus as compared to neat polymers [25, 59].
-
e.
Use of complex filler
As reported, increasing the intensity of the electric field reduces the thickness of the composite. However, a composite in which complex filler is incorporated exhibits a much better actuation behavior. This was observed in an experiment performed, where the actuation behavior of PU/rGO and PU/1G-1 T was compared. The composite with a complex filler showed many results better than the other one [114].
8.4.4 Design and Structure of the Composite
As far as the efficiency and sensitivity of the composites are concerned, the structure and design of the composites are equally important as the selection of matrix and fillers is vital. A lot of studies have been focused on the designing of composites with a specific structure that significantly regulates the efficiency of the composites. Agglomeration of the filler is one of the serious issues which limit the homogenous dispersion of the filler in the matrix. Development of the elastomeric composites is often accomplished with cross-linking phenomena to obtain desired features in the composites. The vulcanization strategy, basically a high-temperature chemical cross-linking method, is commonly used to obtain the cross-linking network in the composite [78, 82, 83, 115]. Electron beam radiation is also considered the best choice for the development of a cross-linking network to have highly uniform dispersion of the filler in the matrix. Cross-linking development by irradiation of electron beam is accompanied at ambient temperature which may lead toward cross-linking without thermal degradation in the polymer matrix and with highly homogenous dispersion of the filler [115]. Filler orientation in DENC is one of the vital factors which influence the dielectric permittivity values. It has been observed that the mean orientation angle demonstrates the resultant dielectric features of the electroactive composites. Theoretical models have been purposed to correlate the experimental data on dielectric properties and numerical results obtained through proposed models and good agreement has been found between them [116]. Selective localization of the filler in the matrix influences morphology which intern demonstrates the rheology and dielectric properties of the composites. Selective localization of the functional filler in the polymer matrix is achieved by the addition of another immiscible polymer as filler. It may result in multiple times improvements in the features of the composites. The addition of 3 wt% of GO in polyurethane-based polylactic acid results in about a 400% increase in the value of dielectric constant as compared to that of polyurethane-based polylactic acid composites without GO [26]. Similarly, the use of the third component as an additive to increase non-covalent interaction between the filler and matrix is also proved very effective and it results in an improvement in the dielectric constant values of ternary composites [117]. In such polymer composites, uniform dispersion of the fillers is obtained, because the third component helps in getting the maximum features of the filler in the composite. The addition of the filler in terms of masterbatch is also a very common strategy for preparing dielectric nanocomposites. Usually, the filler is added in high concentration in a material called carrier materials and this resultant stuff is known as a masterbatch. Finally, this masterbatch is added to the main matrix. The compatibility of the carrier materials with the filler and main matrix is taken into consideration while selecting the carrier material. Composites prepared with this method result high dielectric constant with ultra-low tangent value [118]. The addition of a surfactant along the filler in the polymer matrix is one of the commonly used strategies for the synthesis of composites with enhanced homogenous dispersion. Control of agglomeration by using surfactants like DBSA, APTES, and CTAB helps fillers in imparting maximum features to the polymer composites [24, 119]. Surfactant makes a spread network in the polymer matrix or gets attached to the surface of the nanofillers and prevents or reduces the chances of interaction filler and thus controls the agglomeration of the nanofiller. Uniform dispersion of the filler in the nanocomposites helps in attaining significant improvement in dielectric constant values. Multilayer polymer composites are well known because of their structure which allows tuning of the features by slight modification in it. Dielectric constant and other electrical properties can be tuned in a very broad range just by increasing the number of layers or thickness of the layer of the same combination of filler and matrix, and the preparation method of the composites. Layer assembly is not only helpful in achieving quantitatively good results in DENC but it is also considered a facile approach to attain out of the plane deformation. In many cases, shape reconfiguration is essential in the working of soft robots [34, 120].
8.4.5 Applications
-
a.
Tunable lenses
Lifelike robots have a very important feature, i.e., eyes that can act exactly like a human eye, that can respond quickly and precisely by tuning the focal length [121, 122]. The eye is connected to the ciliary body with the help of a ligament, i.e., fibrous tissue ring attached at its equator. The relaxation and contraction processes of the ciliary body help in the tuning of the lens. Although most of the robots have digital camera-based eyes that move the components mechanically, thus tuning the focus, this process takes a lot of energy. Several soft actuators are employed to overcome this drawback; which tune the focal length by controlling the liquid droplet curvature; including stimuli-response [22], electromagnetic wave [23], electro-wetting[123], dielectrophoretic forces [17], electrochemistry [124], etc. The pre-stretching of a lens is carried out before using it in the robots. A Maxwell stress is created in the actuating system by inducing an electric field; a shorter focal length is created by the lens if its height increases and diameter decreases, causing it to squeeze. The lens gets back to its actual dimensions, exhibiting a greater focal length and the dielectric elastomer actuator re-attains its shape when the applied voltage is turned off. Unfortunately, only a few DE materials including VHB 4910 and silicone are known to fabricate lenses exhibiting high performance. It has been reported by researchers that DE with incorporated dielectric fillers [94] or DE blended with polymers [28] exhibit better electromechanical properties. Recently, a new model has been proposed, that consists of a hybrid structure where a ring made of DENC acts as an actuator and is connected to the lens made of a sphere made up of elastomer [125].
-
b.
Artificial muscles
Some materials undergo deformations in their structures when subjected to an external stimulus (pressure, electricity, light, humidity, heat, etc.); these materials are often referred to as ‘artificial muscles’. They find their applications in different interdisciplinary fields [126,127,128]. Energy density, response time, output force, energy conversion efficiency, actuated strain, and fatigue life are the key features of an artificial muscle [129, 130]. Many types of artificial muscles exhibiting unique properties and advantages have been reported so far, such as natural muscles [131] and humidity/solvent actuation yarn [132, 133]. At some points, artificial muscles are capable to perform even better than naturally occurring human muscles. Recently, the deformable electrode is used by Shea’s group to formulate a stretchable EHD pump; this electrode consists of a dielectric elastomer/carbon black composite which is embedded with a tube made up of monolithic elastomer. Extraordinary mechanical outputs are obtained from this pump, assuring a high mechanical strength. It is reported to be used to create a self-contained fluidic muscle by integration with an elastomeric chamber; eliminating the use of the external compressing system for reversible bending actuation [129]. Miriyev et al. also fabricated a soft actuating composite by combining a polymer matrix like PDMS (poly(dimethylsiloxane) elastomer) with a phase-changing material like ethanol [134]. The deformation of such a composite to maximum volume is done by transitioning the liquid phase of ethanol to the gas phase upon heating.
Embedding magnetic particles into an elastomer matrix is an appealing route to develop soft magnetic actuators. For instance, a cylindrical glass rod was wrapped by a soft magnetic composite by Hu and co-workers [135]; the composite was magnetized by the application of a strong and uniform magnetic field. The uniform external magnetic field interacted with a spatially varying field of magnetic composites; enabling the soft robot to change its shape by generating internal torque. This special method can be applied to fabricate robots out of artificial muscles that enable them to jump, crawl, walk, roll, transport objects, etc.
-
c.
Smart skin
Taking inspiration from nature, i.e., natural skin, researchers are making attempts to create smart electronic skins that can practice LMC (learning-mimicking-creating) cycle; being quite helpful in health monitoring technologies, robotics, prosthetics, etc. The discovery of mechanoreceptors naturally integrated into human skin has opened up a gateway to smart flexible electronics. The tactile sensation of human skin is mimicked by the sensors used inside the smart skin that can detect and respond to haptic stimuli. The idea to create unique features in smart skin such as changing color or shape has been taken from mussels, chameleons, octopuses, etc. Internal organs of the body are also designed in such a way as to derive the LMC cycle along with the external organs. Synaptic, implantable sensors, artificial neurons, energy harvesters, etc., are the major biocompatible electronic devices being used in smart skin [136].
Dielectric elastomer composites are widely employed for the fabrication of smart skin devices. Generally, pre-cured elastomer and conductive filler suspension are blended to form a composite. However, the conductive paths formed inside the matrix should be dispersed homogeneously to avoid variations in the conductivity from one location to another [137]. Several other methods such as the direct incorporation of a conductive network in the elastomer matrix are also being employed in the making of smart skin [138]. A carbonized plain weave cotton fabric was taken by Zhang et al.; it was then encapsulated in an elastomer matrix; resulting in the formulation of a strain sensor [139]; stretchability and sensitivity of such a sensor can be customized according to the requirements. High gauge factors were also attained by an anisotropic conductive material while controlling its flexibility to respond to pressing, bending, and twisting [140].
Implantable devices need bioresorbable batteries for the effective management of energy sources; whose working depends upon mechanical compliance, desorption rates, device dimensions, etc. [141]. The biochemical energy produced by internal body organs such as cardiac movements or breathing is scavenged by the energy devices used. A BD-TENG (biodegradable triboelectric nanogenerator) has been fabricated that can power inter-digit electrodes on which orientation of nerve cell growth was carried out; the BD-TENG consisted of electrode layers, encapsulation structure (biodegradable), and friction layers [142]. An energy harvester was implanted in a smart skin device that can record breathing and heartbeat by Ma et al. [143]. However, large hysteresis and low response time are the main challenges being faced in the field of smart skin sensors.
-
d.
Biomedical applications
Neurostimulation, cardiac pacing, tissue regeneration, therapeutic delivery, biochemical sensing, physiological monitoring, drug delivery, etc., are some of the most common applications of implantable biomedical devices (IMDs) [144,145,146,147]. Some of the main drawbacks being faced while using IMDs are the removal of the device when its life ends, and the risk of infection [144, 148]. To overcome these problems, devices have been formulated that can be degraded in different environments safely, named ‘biodegradable electronics’, or the devices which dissolve automatically in the biofluids without causing toxicity, thus named ‘bioresorbable electronics’ [73, 149]. These electronics can reduce the risks that can be caused by the removal surgery of conventional devices, and increase the human life span by up to three years [150]. IMDs consist of four elements; conductor, semi-conductor, encapsulant, and dielectric. The elastic components in IMDs provide comparatively better integration with the tissues, in which the device is implanted. Sim et al. synthesized a bioelectronic patch, where ion gel (dielectric), polydimethylsiloxane (PDMS) (encapsulant), and PDMS composite (semi-conductor) were interconnected; this patch provides electric simulation by harvesting energy from heartbeat [151]. Similarly, Schiavone and co-workers developed e-dura, an IMD where the electrode was coated with a PDMS composite and PDMS was used as encapsulate; which can apply stimulations to vertebral column electrically [152].
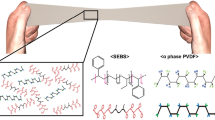
Ling Yu and co-workers proposed the synthesis of an artificial material, where polycaprolactone (3D skeletons) was incorporated into a dielectric elastomer; the as-prepared composite whose contractions and relaxations were similar to that of heart muscles (Fig. 8.3 [153]).

Copyright © 2022 Yun Ling et al.
Schematic diagram of the right ventricular myocardium with undulated, preferentially oriented cardiac muscle fibers, showing anisotropic mechanical and electrical properties. Arrows indicate anatomically defined circumferential and longitudinal axes [153]. Adapted with permission from ref. [153]. Open access under a CC BY 4.0 license.
-
e.
Micro-air vehicle
Naturally occurring flyers commonly show maneuvering and hovering flights. Birds fly in a vertical plane by flapping their wings, and they can change pitch angle at a very small amount. On the other hand, insects fly by flapping their wings in the horizontal plane, they can change pitch angle at a very large amount [154]. Muscles are distributed evenly in the bird’s wings causing active wing actuation, however, the wings of insects have no muscles and their actuation is controlled by the thorax (passive wing actuation). Former is a relatively more complex form of actuation [155]. Muscles used in passive wing actuation are divided into two categories; neuro-controlled signals synchronize the actuation process (synchronous flight muscles) and neuro-controlled signals do not synchronize the actuation process (asynchronous flight muscles) [156]. Based on these muscles, a passive flight is classified as direct (each wing can be directly controlled by the muscle) or indirect flight (simultaneous flapping of wings does not allow the muscle to control individual wings) [155]. Thus, indirect flight mechanism can be employed to create flapping wings artificially [157].
Smart material actuators (SMAs) such as IPMC actuators, SMA actuators, DE actuators, and piezoelectric actuators have a great potential to design flapping-wing mechanism-based devices as they provide high scalability, high damage tolerance, multi-functioning, compactness, high integrability, and high customization facility [158]. Lau et al. combined a rolled DEA with a cross-ply laminate of carbon fiber-reinforced polymer (CFRP ) to verify the feasibility of the insect wing mechanism [159]. Dielectric elastomer devices have been reported to be employed in the fabrication of micro-air vehicles [59, 157].
8.5 Conclusion
Highly stretchable, multi-functional, extensible, incompressible, poly-active, and soft dielectric elastomers have gained the attention of researchers as promising candidates to be used in vast fields of energy harvesters, haptic interfaces, soft robots, artificial muscles, and tunable lenses as generators, actuators, and sensors. They are being incorporated into polymer matrices to form a superior material that exhibits exceptional dielectric constant values coupled with excellent conductivity, and lower values of dielectric loss. Different kinds of fillers (such as ceramics and conductive fillers) can also be added to the DE-based polymer composites, thus improving their electrical properties, lifetime, and stability. Dielectric/polymer composites are being used mainly in artificial muscles, biomedical devices, soft robots, smart skin, micro-air vehicles, etc.
Despite all the achievements made in the field of dielectric nanocomposites based on elastomers, researches are facing different challenges including the need for a detailed understanding of mechanisms related to the dielectric behavior of nanocomposites, synthesis of cost-effective and scalable elastomer-based polymer composites at large scale, development of models for life-prediction and performance evaluation of dielectric materials, etc. Thus, further research for improvements in these highly applicable materials is being focused on by scientists.
References
Ciarella L, Richter A, Henke E-FM (2021) Digital electronics using dielectric elastomer structures as transistors. Appl Phys Lett 119:261901. https://doi.org/10.1063/5.0074821
Röntgen WC (1880) Ueber die durch Electricität bewirkten Form- und Volumenänderungen von dielectrischen Körpern. Ann Phys 247:771–786. https://doi.org/10.1002/andp.18802471304
Pelrine R (2008) Electromechanical transduction effects in dielectric elastomers: actuation, sensing, stiffness modulation and electric energy generation. In: Dielectric elastomers as electromechanical transducers, pp 1–12
Lu T, Ma C, Wang T (2020) Mechanics of dielectric elastomer structures: a review. Extreme Mech Lett 38:100752
Bar-Cohen Y (2002) Electroactive polymers as artificial muscles: a review. J Spacecr Rocket 39(6):822–827
Gupta U, Qin L, Wang Y, Godaba H, Zhu J (2019) Soft robots based on dielectric elastomer actuators: a review. Smart Mat Struct 28(10):103002
Pelrine R, Kornbluh R, Pei Q, Joseph J (2000) High-speed electrically actuated elastomers with strain greater than 100%. Science 287(5454):836–839
Kofod G, Kornbluh RD, Pelrine R, Sommer-Larsen P (2001) Actuation response of polyacrylate dielectric elastomers. In: Smart structures and materials 2001: electroactive polymer actuators and devices. SPIE, pp 141–147
O’Brien B, Gisby T, Anderson IA (2014) Stretch sensors for human body motion 9056:905618. https://doi.org/10.1117/12.2046143
Suo Z (2010) Theory of dielectric elastomers. Acta Mech Solida Sin 23:549–578. https://doi.org/10.1016/S0894-9166(11)60004-9
Carpi F (2010) Electromechanically active polymers. Polym Int 59(3):277–278
Li T, Li G, Liang Y, Cheng T, Dai J, Yang X, Liu B, Zeng Z, Huang Z, Luo Y, Xie T, Yang W (2017) Fast-moving soft electronic fish. Sci Adv 3:e1602045. https://doi.org/10.1126/sciadv.1602045
Gu G, Zou J, Zhao R, Zhao X, Zhu X (2018) Soft wall-climbing robots. Sci Robot 3(25):eaat2874
Christianson C, Goldberg NN, Deheyn DD, Cai S, Tolley MT (2018) Translucent soft robots driven by frameless fluid electrode dielectric elastomer actuators. Sci Robot 3(17):eaat1893
Huang J, Shian S, Suo Z, Clarke DR (2013) Maximizing the energy density of dielectric elastomer generators using equi-biaxial loading. Adv Funct Mater 23:5056–5061. https://doi.org/10.1002/adfm.201300402
Ellingford C, Zhang R, Wemyss AM, Zhang Y, Brown OB, Zhou H, Wan C et al (2020) Self-healing dielectric elastomers for damage-tolerant actuation and energy harvesting. ACS Appl Mater Interfaces 12(6):7595–7604
Ren H, Xianyu H, Xu S, Wu S-T (2008) Adaptive dielectric liquid lens. Opt Express 16:14954–14960. https://doi.org/10.1364/OE.16.014954
Chen Y, Zhao H, Mao J, Chirarattananon P, Helbling EF, Hyun NSP, Wood RJ et al (2019) Controlled flight of a microrobot powered by soft artificial muscles. Nature 575(7782):324–329
Gao Y, Fang X, Tran D, Ju K, Qian B, Li J, Dielectric elastomer actuators based on stretchable and self-healable hydrogel electrodes. R Soc Open Sci 6:182145. https://doi.org/10.1098/rsos.182145
Ji X, Liu X, Cacucciolo V, Civet Y, El Haitami A, Cantin S, Perriard Y, Shea H (2021) Untethered feel-through haptics using 18-µm thick dielectric elastomer actuators. Adv Funct Mater 31:2006639. https://doi.org/10.1002/adfm.202006639
Ho TYK, Nirmal A, Kulkarni MR, Accoto D, Mathews N (2022) Soft actuator materials for electrically driven haptic interfaces. Adv Intell Syst 4(2):2100061
Carpi F, Frediani G, Turco S, De Rossi D (2011) Bioinspired tunable lens with muscle-like electroactive elastomers. Adv Funct Mater 21:4152–4158. https://doi.org/10.1002/adfm.201101253
Pieroni M, Lagomarsini C, Rossi DD, Carpi F (2016) Electrically tunable soft solid lens inspired by reptile and bird accommodation. Bioinspir Biomim 11:065003. https://doi.org/10.1088/1748-3190/11/6/065003
Bashir F, Hussain T, Mujahid A, Shehzad K, Raza MA, Zahid M, Athar MM (2018) Tailoring electrical and thermal properties of polymethyl methacrylate-carbon nanotubes composites through polyaniline and dodecyl benzene sulphonic acid impregnation. Polym Compos 39:E1052–E1059. https://doi.org/10.1002/pc.24485
Dahl M, Liu Y, Yin Y (2014) Composite titanium dioxide nanomaterials. Chem Rev 114:9853–9889. https://doi.org/10.1021/cr400634p
Azadi F, Khonakdar HA, Jafari SH, Arjmand M, Wagenknecht U, Ruckdäschel H, Altstädt V (2022) The effect of tailoring morphology on rheology and dielectric properties of poly (lactic acid)/thermoplastic polyurethane/graphene oxide nanocomposites. Mater Today Commun 33:104497. https://doi.org/10.1016/j.mtcomm.2022.104497
Duduta M, Hajiesmaili E, Zhao H, Wood RJ, Clarke DR (2019) Realizing the potential of dielectric elastomer artificial muscles. Proc Natl Acad Sci 116:2476–2481. https://doi.org/10.1073/pnas.1815053116
Qiu Y, Zhang E, Plamthottam R, Pei Q (2019) Dielectric elastomer artificial muscle: materials innovations and device explorations. Acc Chem Res 52:316–325. https://doi.org/10.1021/acs.accounts.8b00516
Fan P, Zhu Z, Hu Q (2022) Investigation on free relaxation process influencing energy harvesting performance of dielectric elastomer generators in intermittent motion. Sens Actuators Phys 347:113944. https://doi.org/10.1016/j.sna.2022.113944
Gupta U, Qin L, Wang Y, Godaba H, Zhu J (2019) Soft robots based on dielectric elastomer actuators: a review. Smart Mater Struct 28:103002. https://doi.org/10.1088/1361-665X/ab3a77
Zhao X, Li C, Qi R, Guo H, Peng G (2022) Study on relaxation behavior of all-polymer PVDF-based films containing dielectric fluoroelastomer. Polymer 252:124933. https://doi.org/10.1016/j.polymer.2022.124933
Zhu J, Zhang L, Zhao Y, Yin L-J, Zha J-W, Dang Z-M (2022) Advanced dielectric elastomer based on optimized thermoplastic polyurethane–styrene ethylene butylene styrene blend: experiment and simulation. J Appl Polym Sci 139:51595. https://doi.org/10.1002/app.51595
Yu L, Hu T, Yang D, Wei Q (2022) Enhanced electromechanical performance of natural rubber dielectric elastomers achieved by in situ synthesis of silver nanoparticles on TiO2 nanoparticles. IET Nanodielectrics 5:39–49. https://doi.org/10.1049/nde2.12030
Ren C, Su Z, Su Y, Wang L (2022) Polyurethane elastomer layered nanocomposite material for sports grounds and the preparation method thereof. BioMed Res Int 2022:e5152911. https://doi.org/10.1155/2022/5152911
Ziegmann A, Schubert DW (2018) Influence of the particle size and the filling degree of barium titanate filled silicone elastomers used as potential dielectric elastomers on the mechanical properties and the crosslinking density. Mater Today Commun 14:90–98. https://doi.org/10.1016/j.mtcomm.2017.12.013
Zhao Y, Yin L-J, Zhong S-L, Zha J-W, Dang Z-M (2020) Review of dielectric elastomers for actuators, generators and sensors. IET Nanodielectrics 3:99–106. https://doi.org/10.1049/iet-nde.2019.0045
Bartlett MD, Fassler A, Kazem N, Markvicka EJ, Mandal P, Majidi C (2016) Stretchable, high-k dielectric elastomers through liquid-metal inclusions. Adv Mater 28:3726–3731. https://doi.org/10.1002/adma.201506243
Bhuyan P, Cho D, Choe M, Lee S, Park S (2022) Liquid metal patterned stretchable and soft capacitive sensor with enhanced dielectric property enabled by graphite nanofiber fillers. Polymers 14:710. https://doi.org/10.3390/polym14040710
Brochu P, Pei Q (2010) Advances in dielectric elastomers for actuators and artificial muscles. Macromol Rapid Commun 31:10–36. https://doi.org/10.1002/marc.200900425
Low S-H, Lau GK (2014) Bi-axially crumpled silver thin-film electrodes for dielectric elastomer actuators. Smart Mater Struct 23:125021. https://doi.org/10.1088/0964-1726/23/12/125021
Haghiashtiani G, Habtour E, Park SH, Gardea F, McAlpine MC (2018) 3D printed electrically-driven soft actuators. Extreme Mech Lett 21:1–8. https://doi.org/10.1016/j.eml.2018.02.002
Le Floch P, Molinari N, Nan K, Zhang S, Kozinsky B, Suo Z, Liu J (2020) Fundamental limits to the electrochemical impedance stability of dielectric elastomers in bioelectronics. Nano Lett 20:224–233. https://doi.org/10.1021/acs.nanolett.9b03705
Godaba H, Zhang Z-Q, Gupta U, Foo CC, Zhu J (2019) Instabilities in dielectric elastomers: buckling, wrinkling, and crumpling. Soft Matter 15:7137–7144. https://doi.org/10.1039/C9SM01145E
Maffli L, Rosset S, Shea HR (2013) Zipping dielectric elastomer actuators: characterization, design and modeling. Smart Mater Struct 22:104013. https://doi.org/10.1088/0964-1726/22/10/104013
Shintake J, Ichige D, Kanno R, Nagai T, Shimizu K (2021) Monolithic stacked dielectric elastomer actuators. Front Robot AI 8
Kunz A (2006) Spring roll dielectric elastomer actuators for a portable force feedback glove. Smart Struct Mater 2006 Electroact Polym Actuators Devices EAPAD
Ko UH, Kumar V, Rosen B, Varghese S (2022) Characterization of bending balloon actuators. Front Robot AI 9
Yunguang L, Wang H, Zhu Y (2010) Design and implementation of cone dielectric elastomer actuator with double-slider mechanism. J Bionic Eng 7. https://doi.org/10.1016/S1672-6529(09)60237-7
Carpi F, Salaris C, Rossi DD (2007) Folded dielectric elastomer actuators. Smart Mater Struct 16:S300. https://doi.org/10.1088/0964-1726/16/2/S15
Lochmatter P, Kovacs G (2008) Design and characterization of an active hinge segment based on soft dielectric EAPs. Sens Actuators Phys 141:577–587. https://doi.org/10.1016/j.sna.2007.10.029
Wang NF, Guo H, Chen B, Cui C, Zhang X (2018) Design of a rotary dielectric elastomer actuator using topology optimization method based on pairs of curves. Smart Mater Struct 27. https://doi.org/10.1088/1361-665X/aab991
Su Y, Ogden RW, Destrade M (2021) Bending control and stability of functionally graded dielectric elastomers. Extreme Mech Lett 43:101162. https://doi.org/10.1016/j.eml.2020.101162
Carpi F, Chiarelli P, Mazzoldi A, de rossi D (2003) Dielectric elastomer planar actuators for small-scale applications. Proc SPIE—Int Soc Opt Eng. https://doi.org/10.1117/12.508694
Palmić TB, Slavič J (2022) Single-process 3D-printed stacked dielectric actuator. Int J Mech Sci 230:107555. https://doi.org/10.1016/j.ijmecsci.2022.107555
Maas J, Tepel D, Hoffstadt T (2015) Actuator design and automated manufacturing process for DEAP-based multilayer stack-actuators. Meccanica 50:2839–2854. https://doi.org/10.1007/s11012-015-0273-2
Rossiter J, Walters P, Stoimenov B (2009) Printing 3D dielectric elastomer actuators for soft robotics. In: Electroactive polymer actuators and devices (EAPAD) 2009. SPIE, pp 149–158
Kofod G, Paajanen M, Bauer S (2006) Self-organized minimum-energy structures for dielectric elastomer actuators. Appl Phys A 85:141–143. https://doi.org/10.1007/s00339-006-3680-3
Chiang Foo C, Cai S, Jin Adrian Koh S, Bauer S, Suo Z (2012) Model of dissipative dielectric elastomers. J Appl Phys 111:034102. https://doi.org/10.1063/1.3680878
Panahi-Sarmad M, Zahiri B, Noroozi M (2019) Graphene-based composite for dielectric elastomer actuator: a comprehensive review. Sens Actuators Phys 293. https://doi.org/10.1016/j.sna.2019.05.003
Liu L, Han Y, Xing Z, Yong H (2022) Nonlinear deformation and instability of a dielectric elastomer tube actuator. Int J Non-Linear Mech 147:104235. https://doi.org/10.1016/j.ijnonlinmec.2022.104235
Boldini A, Porfiri M (2022) On Maxwell stress and its relationship with the dielectric constant in the actuation of ionic polymer metal composites. J Mech Phys Solids 164:104875. https://doi.org/10.1016/j.jmps.2022.104875
Jun K, Kim D, Ryu S, Oh I-K (2017) Surface modification of anisotropic dielectric elastomer actuators with Uni-A nd bi-axially wrinkled carbon electrodes for wettability control. Sci Rep 7. https://doi.org/10.1038/s41598-017-06274-0
Kornbluh RD, Pelrine R, Prahlad H, Wong-Foy A, McCoy B, Kim S, Eckerle J, Low T (2011) From boots to buoys: promises and challenges of dielectric elastomer energy harvesting 7976:797605. https://doi.org/10.1117/12.882367
Jean-Mistral C, Basrour S, Chaillout J-J (2008) Dielectric polymer: scavenging energy from human motion. In: Electroactive polymer actuators and devices (EAPAD) 2008. SPIE, pp 369–378
Rasmussen L (2012) Electroactivity in polymeric materials. Springer, US, Boston, MA
Kornbluh R, Pelrine R, Prahlad H, Wong-Foy A, McCoy B, Kim S, Eckerle J, Low T (2012) Dielectric elastomers: stretching the capabilities of energy harvesting. MRS Bull 37. https://doi.org/10.1557/mrs.2012.41
Lee YR, Kwon H, Lee DH, Lee BY (2017) Highly flexible and transparent dielectric elastomer actuators using silver nanowire and carbon nanotube hybrid electrodes. Soft Matter 13:6390–6395. https://doi.org/10.1039/C7SM01329A
Kofod G, Wirges W, Paajanen M, Bauer S (2007) Energy minimization for self-organized structure formation and actuation. Appl Phys Lett 90:081916. https://doi.org/10.1063/1.2695785
Araromi OA, Gavrilovich I, Shintake J, Rosset S, Richard M, Gass V, Shea HR (2015) Rollable multisegment dielectric elastomer minimum energy structures for a deployable microsatellite gripper. IEEEASME Trans Mechatron 20:438–446. https://doi.org/10.1109/TMECH.2014.2329367
Shian S, Bertoldi K, Clarke DR (2015) Dielectric elastomer based “grippers” for soft robotics. Adv Mater 27:6814–6819. https://doi.org/10.1002/adma.201503078
Guo Y, Liu L, Liu Y, Leng J (2021) Review of dielectric elastomer actuators and their applications in soft robots. Adv Intell Syst 3:2000282. https://doi.org/10.1002/aisy.202000282
Cao J, Qin L, Liu J, Ren Q, Foo CC, Wang H, Lee HP, Zhu J (2018) Untethered soft robot capable of stable locomotion using soft electrostatic actuators. Extreme Mech Lett 21:9–16. https://doi.org/10.1016/j.eml.2018.02.004
Kuzma M, Gerhard E, Shan D, Yang J (2020) Advances in bioresorbable electronics and uses in biomedical sensing, pp 29–72
Li J, Liu L, Liu Y, Leng J (2019) Dielectric elastomer spring-roll bending actuators: applications in soft robotics and design. Soft Robot 6:69–81. https://doi.org/10.1089/soro.2018.0037
Ishige M, Umedachi T, Taniguchi T, Kawahara Y (2019) Exploring behaviors of caterpillar-like soft robots with a central pattern generator-based controller and reinforcement learning. Soft Robot 6:579–594. https://doi.org/10.1089/soro.2018.0126
Chanakul A, Saymung R, Seetha S, Traiphol R, Traiphol N (2021) Solution-mixing method for large-scale production of reversible thermochromic and acid/base-colorimetric sensors. Colloids Surf Physicochem Eng Asp 615:126241. https://doi.org/10.1016/j.colsurfa.2021.126241
Nedelcu N, Chiroiu V, Rugină C, Munteanu L, Ioan R, Girip I, Dragne C (2020) Dielectric properties of GeSbSe glasses prepared by the conventional melt-quenching method. Results Phys 16:102856. https://doi.org/10.1016/j.rinp.2019.102856
Hussain T, Malik T, Mujahid A, Mustafa G (2018) Polystyrene adsorbed multi-walled carbon nanotubes incorporated polymethylmethacrylate composites with modified percolation phenomena. MRS Adv 3:25–30. https://doi.org/10.1557/adv.2017.625
Zhang H, Jiang H, Huang Z-X, Qu J-P (2022) Toward high dielectric constant and low dielectric loss nanocomposite via kinetical migration. Compos Sci Technol 221:109310. https://doi.org/10.1016/j.compscitech.2022.109310
Zhou L, Tian Y, Xu P, Wei H, Li Y, Peng H-X, Qin F (2021) Effect of the selective localization of carbon nanotubes and phase domain in immiscible blends on tunable microwave dielectric properties. Compos Sci Technol 213:108919. https://doi.org/10.1016/j.compscitech.2021.108919
Danner PM, Iacob M, Sasso G, Burda I, Rieger B, Nüesch F, Opris DM (2022) Solvent-free synthesis and processing of conductive elastomer composites for green dielectric elastomer transducers. Macromol Rapid Commun 43:2100823. https://doi.org/10.1002/marc.202100823
Arjmand M, Mahmoodi M, Park S, Sundararaj U (2013) An innovative method to reduce the energy loss of conductive filler/polymer composites for charge storage applications. Compos Sci Technol 78:24–29. https://doi.org/10.1016/j.compscitech.2013.01.019
Thomassin J-M, Pagnoulle C, Bednarz L, Huynen I, Jerome R, Detrembleur C (2008) Foams of polycaprolactone/MWNT nanocomposites for efficient EMI reduction. J Mater Chem 18:792–796. https://doi.org/10.1039/B709864B
Ameli A, Nofar M, Park CB, Pötschke P, Rizvi G (2014) Polypropylene/carbon nanotube nano/microcellular structures with high dielectric permittivity, low dielectric loss, and low percolation threshold. Carbon 71:206–217. https://doi.org/10.1016/j.carbon.2014.01.031
Liu J, Tian G, Qi S, Wu Z, Wu D (2014) Enhanced dielectric permittivity of a flexible three-phase polyimide–graphene–BaTiO3 composite material. Mater Lett 124:117–119. https://doi.org/10.1016/j.matlet.2014.02.105
Martinelli NG, Savini M, Muccioli L, Olivier Y, Castet F, Zannoni C, Beljonne D, Cornil J (2009) Modeling polymer dielectric/pentacene interfaces: on the role of electrostatic energy disorder on charge carrier mobility. Adv Funct Mater 19:3254–3261. https://doi.org/10.1002/adfm.200901077
Kim J-Y, Kim T, Suk JW, Chou H, Jang J-H, Lee JH, Kholmanov IN, Akinwande D, Ruoff RS (2014) Enhanced dielectric performance in polymer composite films with carbon nanotube-reduced graphene oxide hybrid filler. Small 10:3405–3411. https://doi.org/10.1002/smll.201400363
Tian M, Wei Z, Zan X, Zhang L, Zhang J, Ma Q, Ning N, Nishi T (2014) Thermally expanded graphene nanoplates/polydimethylsiloxane composites with high dielectric constant, low dielectric loss and improved actuated strain. Compos Sci Technol 99:37–44. https://doi.org/10.1016/j.compscitech.2014.05.004
Gao J, Asadi K, Xu JB, An J (2009) Controlling of the surface energy of the gate dielectric in organic field-effect transistors by polymer blend. Appl Phys Lett 94:093302. https://doi.org/10.1063/1.3086894
Ameli A, Wang S, Kazemi Y, Park CB, Pötschke P (2015) A facile method to increase the charge storage capability of polymer nanocomposites. Nano Energy 15:54–65. https://doi.org/10.1016/j.nanoen.2015.04.004
Hu P, Shen Y, Guan Y, Zhang X, Lin Y, Zhang Q, Nan C-W (2014) Topological-structure modulated polymer nanocomposites exhibiting highly enhanced dielectric strength and energy density. Adv Funct Mater 24:3172–3178. https://doi.org/10.1002/adfm.201303684
Zhang G, Brannum D, Dong D, Tang L, Allahyarov E, Tang S, Kodweis K, Lee J-K, Zhu L (2016) Interfacial polarization-induced loss mechanisms in polypropylene/BaTiO3 nanocomposite dielectrics. Chem Mater 28:4646–4660. https://doi.org/10.1021/acs.chemmater.6b01383
Zhu L (2014) Exploring strategies for high dielectric constant and low loss polymer dielectrics. J Phys Chem Lett 5:3677–3687. https://doi.org/10.1021/jz501831q
Yang D, Ni Y, Kong X, Wang Y, Zhang L (2019) A mussel-like inspired modification of BaTiO3 nanopartciles using catechol/polyamine co-deposition and silane grafting for high-performance dielectric elastomer composites. Compos Part B Eng 172:621–627. https://doi.org/10.1016/j.compositesb.2019.05.101
Maiolino P, Galantini F, Mastrogiovanni F, Gallone G, Cannata G, Carpi F (2015) Soft dielectrics for capacitive sensing in robot skins: Performance of different elastomer types. Sens Actuators Phys 226:37–47. https://doi.org/10.1016/j.sna.2015.02.010
Szadkowski B, Marzec A, Zaborski M (2020) Use of carbon black as a reinforcing nano-filler in conductivity-reversible elastomer composites. Polym Test 81:106222. https://doi.org/10.1016/j.polymertesting.2019.106222
Kim WJ, Cho S, Hong J, Hong JP (2022) Geometrically versatile triboelectric yarn-based harvesters via carbon nanotubes-elastomer composites. Compos Sci Technol 219:109247. https://doi.org/10.1016/j.compscitech.2021.109247
Fredin LA, Li Z, Lanagan MT, Ratner MA, Marks TJ (2013) Sustainable high capacitance at high frequencies: metallic aluminum-polypropylene nanocomposites. ACS Nano 7:396–407. https://doi.org/10.1021/nn3044148
Dang Z-M, Zheng M-S, Zha J-W (2016) 1D/2D carbon nanomaterial-polymer dielectric composites with high permittivity for power energy storage applications. Small 12:1688–1701. https://doi.org/10.1002/smll.201503193
Kim H, Abdala AA, Macosko CW (2010) Graphene/polymer nanocomposites. Macromolecules 43:6515–6530. https://doi.org/10.1021/ma100572e
Kuilla T, Bhadra S, Yao D, Kim NH, Bose S, Lee JH (2010) Recent advances in graphene based polymer composites. Prog Polym Sci 35:1350–1375. https://doi.org/10.1016/j.progpolymsci.2010.07.005
Wang Y, Gu P, Zhao Z, Zhou P, Li Z, Li Y (2020) Synthesis of graphene-like carbon film on SiC substrate. J Cryst Growth 531:125356. https://doi.org/10.1016/j.jcrysgro.2019.125356
Warner JH, Schaffel F, Rummeli M, Bachmatiuk A (2012) Graphene: Ffndamentals and emergent applications. Newnes
Tour JM (2014) Scaling up exfoliation. Nat Mater 13:545–546. https://doi.org/10.1038/nmat3961
Wang X, You H, Liu F, Li M, Wan L, Li S, Li Q, Xu Y, Tian R, Yu Z, Xiang D, Cheng J (2009) Large-scale synthesis of few-layered graphene using CVD. Chem Vap Depos 15:53–56. https://doi.org/10.1002/cvde.200806737
Acik M, Lee G, Mattevi C, Pirkle A, Wallace RM, Chhowalla M, Cho K, Chabal Y (2011) The role of oxygen during thermal reduction of graphene oxide studied by infrared absorption spectroscopy. J Phys Chem C 115:19761–19781. https://doi.org/10.1021/jp2052618
Huang X, Jiang P (2015) Core-shell structured high-k polymer nanocomposites for energy storage and dielectric applications. Adv Mater 27:546–554. https://doi.org/10.1002/adma.201401310
Punetha VD, Rana S, Yoo HJ, Chaurasia A, McLeskey JT, Ramasamy MS, Sahoo NG, Cho JW (2017) Functionalization of carbon nanomaterials for advanced polymer nanocomposites: a comparison study between CNT and graphene. Prog Polym Sci 67:1–47. https://doi.org/10.1016/j.progpolymsci.2016.12.010
Liao L, Xie Q, Guo X, Liu Z (2015) Fabrication of chemical graphene nanoribbons via edge-selective covalent modification. Adv Mater 27:4093–4096. https://doi.org/10.1002/adma.201501788
Wang H, Bi S-G, Ye Y-S, Xue Y, Xie X-L, Mai Y-W (2015) An effective non-covalent grafting approach to functionalize individually dispersed reduced graphene oxide sheets with high grafting density, solubility and electrical conductivity. Nanoscale 7:3548–3557. https://doi.org/10.1039/C4NR06710J
Kumar S, Raj S, Kolanthai E, Sood AK, Sampath S, Chatterjee K (2015) Chemical functionalization of graphene to augment stem cell osteogenesis and inhibit biofilm formation on polymer composites for orthopedic applications. ACS Appl Mater Interfaces 7:3237–3252. https://doi.org/10.1021/am5079732
Sreeprasad TS, Berry V (2013) How do the electrical properties of graphene change with its functionalization? Small 9:341–350. https://doi.org/10.1002/smll.201202196
Vasileiou AA, Kontopoulou M, Docoslis A (2014) A noncovalent compatibilization approach to improve the filler dispersion and properties of polyethylene/graphene composites. ACS Appl Mater Interfaces 6:1916–1925. https://doi.org/10.1021/am404979g
Chen T, Qiu J, Zhu K, Li J (2016) Electro-mechanical performance of polyurethane dielectric elastomer flexible micro-actuator composite modified with titanium dioxide-graphene hybrid fillers. Mater Des 90:1069–1076. https://doi.org/10.1016/j.matdes.2015.11.068
Prasad Sahoo B (2021) Fabrication of radiation crosslinked and MWCNT reinforced ethylene acrylic elastomer nanocomposites: Evaluation of mechanical, dynamic mechanical, thermal and dielectric properties. Mater Today Proc 41:203–210. https://doi.org/10.1016/j.matpr.2020.08.692
Wang Y, Kim S, Li GP, Sun LZ (2015) Filler orientation effect on relative permittivity of dielectric elastomer nanocomposites filled with carbon nanotubes. Comput Mater Sci 104:69–75. https://doi.org/10.1016/j.commatsci.2015.03.022
Hussain T, Jabeen S, Shehzad K, Mujahid A, Ahmad MN, Farooqi ZH, Raza MH (2018) Polyaniline/silver decorated-MWCNT composites with enhanced electrical and thermal properties. Polym Compos 39:E1346–E1353. https://doi.org/10.1002/pc.24219
Song B (2022) Study on dielectric and thermal properties of ABS/multilayer graphene composites. J Phys Conf Ser 2247:012011. https://doi.org/10.1088/1742-6596/2247/1/012011
Chonat A, Palatty S (2020) Enhanced electrochemical performance of a hybrid supercapacitive material based on ternary doped polyaniline/activated carbon composite. Energy Fuels 34:10148–10159. https://doi.org/10.1021/acs.energyfuels.0c01555
Guin T, Settle MJ, Kowalski BA, Auguste AD, Beblo RV, Reich GW, White TJ (2018) Layered liquid crystal elastomer actuators. Nat Commun 9:2531. https://doi.org/10.1038/s41467-018-04911-4
Li J, Wang Y, Liu L, Xu S, Liu Y, Leng J, Cai S (2019) A biomimetic soft lens controlled by electrooculographic signal. Adv Funct Mater 29:1903762. https://doi.org/10.1002/adfm.201903762
Xiao Y, Mao J, Shan Y, Yang T, Chen Z, Zhou F, He J, Shen Y, Zhao J, Li T, Luo Y (2020) Anisotropic electroactive elastomer for highly maneuverable soft robotics. Nanoscale 12:7514–7521. https://doi.org/10.1039/D0NR00924E
Krogmann F, Monch W, Zappe H (2008) Electrowetting for tunable microoptics. J Microelectromechanical Syst 17:1501–1512. https://doi.org/10.1109/JMEMS.2008.2007256
Hwang T, Kwon H-Y, Oh J-S, Hong J-P, Hong S-C, Lee Y, Ryeol Choi H, Jin Kim K, Hossain Bhuiya M, Nam J-D (2013) Transparent actuator made with few layer graphene electrode and dielectric elastomer, for variable focus lens. Appl Phys Lett 103:023106. https://doi.org/10.1063/1.4812982
Jiang L, Wang Y, Wang X, Ning F, Wen S, Zhou Y, Chen S, Betts A, Jerrams S, Zhou F-L (2021) Electrohydrodynamic printing of a dielectric elastomer actuator and its application in tunable lenses. Compos Part Appl Sci Manuf 147:106461. https://doi.org/10.1016/j.compositesa.2021.106461
Chen Y, Chen C, Rehman HU, Zheng X, Li H, Liu H, Hedenqvist MS (2020) Shape-memory polymeric artificial muscles: mechanisms, applications and challenges. Mol Basel Switz 25:E4246. https://doi.org/10.3390/molecules25184246
Mirvakili SM, Hunter IW (2018) Artificial muscles: mechanisms, applications, and challenges. Adv Mater 30:1704407. https://doi.org/10.1002/adma.201704407
Yang J, Wang S, Yao J, Yang X, Yu T, Wei K (2022) Mechanochemical characteristics and influence mechanisms of a biomass hydrogel artificial muscle based on different parameters of the sodium alginate adjustment. Smart Mater Struct 31:055002. https://doi.org/10.1088/1361-665X/ac5aa6
Wang J, Gao D, Lee PS (2021) Recent progress in artificial muscles for interactive soft robotics. Adv Mater 33:2003088. https://doi.org/10.1002/adma.202003088
Zhang J, Sheng J, O’Neill CT, Walsh CJ, Wood RJ, Ryu J-H, Desai JP, Yip MC (2019) Robotic artificial muscles: current progress and future perspectives. IEEE Trans Robot 35:761–781. https://doi.org/10.1109/TRO.2019.2894371
Liang W, Liu H, Wang K, Qian Z, Ren L, Ren L (2020) Comparative study of robotic artificial actuators and biological muscle. Adv Mech Eng 12:1687814020933409. https://doi.org/10.1177/1687814020933409
Chen P, Xu Y, He S, Sun X, Pan S, Deng J, Chen D, Peng H (2015) Hierarchically arranged helical fibre actuators driven by solvents and vapours. Nat Nanotechnol 10:1077–1083. https://doi.org/10.1038/nnano.2015.198
Gu X, Fan Q, Yang F, Cai L, Zhang N, Zhou W, Zhou W, Xie S (2016) Hydro-actuation of hybrid carbon nanotube yarn muscles. Nanoscale 8:17881–17886. https://doi.org/10.1039/C6NR06185K
Miriyev A, Stack K, Lipson H (2017) Soft material for soft actuators. Nat Commun 8:596. https://doi.org/10.1038/s41467-017-00685-3
Hu W, Lum GZ, Mastrangeli M, Sitti M (2018) Small-scale soft-bodied robot with multimodal locomotion. Nature 554:81–85. https://doi.org/10.1038/nature25443
Nie B, Liu S, Qu Q, Zhang Y, Zhao M, Liu J (2022) Bio-inspired flexible electronics for smart E-skin. Acta Biomater 139:280–295. https://doi.org/10.1016/j.actbio.2021.06.018
Yang Y, Zhao G, Cheng X, Deng H, Fu Q (2021) Stretchable and healable conductive elastomer based on PEDOT: PSS/natural rubber for self-powered temperature and strain sensing. ACS Appl Mater Interfaces 13:14599–14611. https://doi.org/10.1021/acsami.1c00879
Rentals J, Wang C, Zhang X, Carey T, Chen K, Yin Y, Torrisi F (2016) Environmentally-friendly conductive cotton fabric as flexible strain sensor based on hot press reduced graphene oxide. Carbon 111. https://doi.org/10.1016/j.carbon.2016.10.045
Zhang M, Wang C, Wang H, Jian M, Hao X, Zhang Y (2017) Carbonized cotton fabric for high-performance wearable strain sensors. Adv Funct Mater 27:1604795. https://doi.org/10.1002/adfm.201604795
Araromi OA, Graule MA, Dorsey KL, Castellanos S, Foster JR, Hsu W-H, Passy AE, Vlassak JJ, Weaver JC, Walsh CJ, Wood RJ (2020) Ultra-sensitive and resilient compliant strain gauges for soft machines. Nature 587:219–224. https://doi.org/10.1038/s41586-020-2892-6
Huang X, Wang D, Yuan Z, Xie W, Wu Y, Li R, Zhao Y, Luo D, Cen L, Chen B, Wu H, Xu H, Sheng X, Zhang M, Zhao L, Yin L (2018) A fully biodegradable battery for self-powered transient implants. Small Weinh Bergstr Ger 14:e1800994. https://doi.org/10.1002/smll.201800994
Zheng Q, Zou Y, Zhang Y, Liu Z, Shi B, Wang X, Jin Y, Ouyang H, Li Z, Wang ZL (2016) Biodegradable triboelectric nanogenerator as a life-time designed implantable power source. Sci Adv 2:e1501478. https://doi.org/10.1126/sciadv.1501478
Ma Y, Zheng Q, Liu Y, Shi B, Xue X, Ji W, Liu Z, Jin Y, Zou Y, An Z, Zhang W, Wang X, Jiang W, Xu Z, Wang ZL, Li Z, Zhang H (2016) Self-powered, one-stop, and multifunctional implantable triboelectric active sensor for real-time biomedical monitoring. Nano Lett 16:6042–6051. https://doi.org/10.1021/acs.nanolett.6b01968
Chatterjee S, Saxena M, Padmanabhan D, Jayachandra M, Pandya HJ (2019) Futuristic medical implants using bioresorbable materials and devices. Biosens Bioelectron 142:111489. https://doi.org/10.1016/j.bios.2019.111489
Ramesh S, Lungaro L, Tsikritsis D, Weflen E, Rivero IV, Elfick APD (2018) Fabrication and evaluation of poly(lactic acid), chitosan, and tricalcium phosphate biocomposites for guided bone regeneration. J Appl Polym Sci 135:46692. https://doi.org/10.1002/app.46692
Turner B, Ramesh S, Menegatti S, Daniele M (2022) Resorbable elastomers for implantable medical devices: highlights and applications. Polym Int 71:552–561. https://doi.org/10.1002/pi.6349
Turner BL, Kilgour KM, Stine SJ, Daniele M, Menegatti S (2020) Dual-affinity ratiometric quenching (DARQ) assay for the quantification of therapeutic antibodies in CHO-S cell culture fluids. Anal Chem 92:16274–16283. https://doi.org/10.1021/acs.analchem.0c04269
Singh R, Bathaei MJ, Istif E, Beker L (2020) A review of bioresorbable implantable medical devices: materials, fabrication, and implementation. Adv Healthc Mater 9:2000790. https://doi.org/10.1002/adhm.202000790
Huang X (2018) Materials and applications of bioresorbable electronics. J Semicond 39:011003. https://doi.org/10.1088/1674-4926/39/1/011003
Lau EW (2017) Technologies for prolonging cardiac implantable electronic device longevity. Pacing Clin Electrophysiol 40:75–96. https://doi.org/10.1111/pace.12989
Sim K, Ershad F, Zhang Y, Yang P, Shim H, Rao Z, Lu Y, Thukral A, Elgalad A, Xi Y, Tian B, Taylor DA, Yu C (2020) An epicardial bioelectronic patch made from soft rubbery materials and capable of spatiotemporal mapping of electrophysiological activity. Nat Electron 3:775–784. https://doi.org/10.1038/s41928-020-00493-6
Schiavone G, Fallegger F, Kang X, Barra B, Vachicouras N, Roussinova E, Furfaro I, Jiguet S, Seáñez I, Borgognon S, Rowald A, Li Q, Qin C, Bézard E, Bloch J, Courtine G, Capogrosso M, Lacour SP (2020) Soft, implantable bioelectronic interfaces for translational research. Adv Mater 32:1906512. https://doi.org/10.1002/adma.201906512
Ling Y, Pang W, Liu J, Page M, Xu Y, Zhao G, Stalla D, Xie J, Zhang Y, Yan Z (2022) Bioinspired elastomer composites with programmed mechanical and electrical anisotropies. Nat Commun 13:524. https://doi.org/10.1038/s41467-022-28185-z
Shyy W, Lian Y, Tang J, Viieru D, Liu H (2007) Aerodynamics of low Reynolds Number flyers. Cambridge University Press, Cambridge
Grimaldi DA, Engel MS (2005) Evolution of the insects. Cambridge University Press, Cambridge, UK and New York
Karásek M (2014) Robotic hummingbird: Design of a control mechanism for a hovering flapping wing micro air vehicle
Chattaraj N, Ganguli R (2022) Mechatronic approaches to synthesize biomimetic flapping-wing mechanisms: a review. Int J Aeronaut Space Sci. https://doi.org/10.1007/s42405-022-00527-7
Gomis-Bellmunt O, Campanile LF (2009). Design rules for actuators in active mechanical systems. Springer Science & Business Media
Xiao S, Hu K, Huang B, Deng H, Ding X (2021) A review of research on the mechanical design of hoverable flapping wing micro-air vehicles. J Bionic Eng 18:1235–1254. https://doi.org/10.1007/s42235-021-00118-4
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2024 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this chapter

Cite this chapter
Hussain, T., Batool, R., Shehzad, K., Mujahid, A., Afzal, A., Zahid, M. (2024). Fabrication and Properties of Dielectric Elastomer-Based Nanocomposites. In: Moharana, S., Gregory, D.H., Mahaling, R.N. (eds) Emerging Nanodielectric Materials for Energy Storage. Nanostructure Science and Technology. Springer, Cham. https://doi.org/10.1007/978-3-031-40938-7_8
Download citation
DOI: https://doi.org/10.1007/978-3-031-40938-7_8
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-40937-0
Online ISBN: 978-3-031-40938-7
eBook Packages: Chemistry and Materials ScienceChemistry and Material Science (R0)