
Abstract
Conventional electromechanical actuators cannot independently produce flapping-wing motion and typically require complimentary mechanical transmission mechanisms to achieve that motion. Hence, the selection and design of electromechanical actuators need to be considered in parallel with the selection and design of mechanical transmission mechanisms. The article presents a review on the mechatronics-based flapping-wing mechanisms applicable to micro air vehicles, which have been reported so far in the literature to the best of authors’ knowledge. The contribution of this review explicitly illustrates a design-map showing all the possible mechatronic methods to synthesize flapping-wing mechanisms, highlighting both attempted approaches in literature and unattempted approaches, which can be investigated in the upcoming time. The comparative discussion highlights both the capabilities and design-trade-offs of all the approaches to produce flapping-wing motion in their own way. The research gap recognized by the design-map presents the scope of future investigation in this domain.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The lift producing aerodynamic models for the fixed-wing and rotary-wing aircraft have been thoroughly explored and established over the last century. However, the flapping-wing aerodynamics and its associated aero-elastic interaction have received meager attention due to their complexity involved at low Reynolds number regime. Therefore, the engineers have preferred to adopt bio-mimicking instead of developing flapping-wing MAVs from the first principles. The bio-mimicking approach is a guided approach, which provides an insight to estimate the wing material, wing structure, wing dynamics, body mass, geometry, and the actuation technique to make an initial design of a flapping-wing micro-robot. The study also helps to roughly correlate the lift force with the wing structure and wing dynamics. The natural flyers, such as, few species of insects, bats and birds fly at low Reynolds number regime [1]. The exploration and analysis of such flyers provides a preliminary knowledge to initiate the design of bio-mimicked flapping wing MAVs [1, 2].
1.1 Wing Actuation in Natural Flyers
Both the hovering and maneuvering flights are common in natural flyers. We find various wing kinematics in natural flyers due to their extensive morphological diversity. Figure 1 shows the locus of the wing tip relative to the body for different natural flyers during their flight [1]. Unlike the birds, which can flap their wings in a vertical plane and can change the pitch angle of the wing by a small amount during flight, the insects can flap their wings in horizontal plane and can change the pitch angle of the wing by a large amount during flight [1]. The wing structures of some natural flyers, such as, birds and bats, are extremely complex, since, their wings consist of muscles, which are distributed over their whole wings. This type of bio-mechanism causes active wing actuation [1]. Whereas, the wings of insects do not contain any muscle [3] and are actuated and controlled from their thorax. This type of bio-mechanism causes passive wing actuation. The complexity of passive wing actuation is less than the complexity of the active wing actuation. Based on the actuation inside the thorax of insects, the actuation muscles are further classified into two categories: synchronous flight muscle and asynchronous flight muscle (Fig. 2) [4]. Actuation by synchronous flight muscles is synchronized with the neuro-controlled signals. These muscles can control each wing directly and cause direct flight [3]. Whereas, actuation by asynchronous flight muscles is not synchronized with the neuro-controlled signals. These muscles expand and contract the thorax to actuate both the wings simultaneously. This is known as indirect flight [3]. In direct flight, individual wing control is possible, whereas, in indirect flight, individual wing control is not possible since both the wings always flap simultaneously. Deora et al. have investigated that the functionality of bio-mechanical flapping-wing mechanism in insect can be modelled using conventional fundamental mechanical elements, which are used for making mechanical mechanisms. Figure 2c shows a schematic representation of a Dipteran thoracic mechanism using conventional fundamental mechanical elements [5]. The discussion leads to a conclusion that the indirect flight actuation technique (Figs. 2b, 3) is the simplest technique for flapping wings among all the flyers, which are available in nature. This conclusion is also supported by the publication statistics, which is discussed in the concluding remarks section at end of this article.

Locus of wing tip relative to the body for different flyers: a albatross, fast gait b pigeon, slow gait c horseshoe bat, fast flight d horseshoe bat, slow gait e blow fly f locust [1]


Classification of wing actuation technique in natural flyers
Apart from the flight muscles, the bio-mechanical transmission mechanisms are also integral elements, which are tasked to produce flapping wing motion with desired wing kinematics [5, 6]. Further research has shown that the body structure of the natural flyers also contributes to flight dynamics to some extent. Extensive physiological investigation has revealed that the morphological features, such as, shape, size, venation pattern, compliance, flapping frequency of the wings, actuation muscles, bio-mechanical transmission mechanisms, body structures of natural flyers exhibit considerable diversity in nature. Also the availability of various wing kinematics, which are shown in Fig. 1, discard the logic to adopt any specific wing kinematics assuming that is the best option to mimic a bio-inspired design. There is no evidence in literature to conclude whether this morphological diversity is because of bio-material limitations or for beneficial flight performance [7]. This might have happened due to constrained evolution. This ambiguity also motivated the researchers to pursue bio-mimicking of any flying species expecting that all the natural flyers inherit efficient and optimized biological design obeying their respective constrained evolutionary footprint. This provides flexibility to mimic and customize any wing-flapping mechanism and wing kinematics, which can satisfy the engineering requirements.
1.2 Bio-mimicking and Design Constraints
The preceding discussion indicates that the indirect flight actuation technique (Figs. 2b, 3) is the simplest wing actuation technique among all the natural flyers. As a consequence, most of the investigators have attempted indirect flight mechanism to design and develop bio-inspired flapping-wing robots. As applicable to existing aircraft, light vehicle weight, high pay load capacity, high energy efficiency, long endurance and controlled maneuvering are the prime features required in any flapping-wing MAV. The manufacturing technology faces many challenges to achieve these features along with the structural miniaturization. For instance, the development of bio-inspired flapping-wing MAVs face challenges because of the unavailability of proper actuators and mechanical transmission mechanisms, which will exactly match the quantitative characteristics of bio-muscles and bio-mechanisms. Therefore, the endeavor of the developers is limited to develop mechanisms to achieve the indirect flight kinematics with the available technology, which is not the exact replica of the targeted bio-muscle and bio-mechanism. The increasing demand for low-speed MAVs has led to the development of such designs.
The scope of the present review is confined to the electromechanically actuated flapping-wing mechanisms, which have been attempted so far by several researchers. As already mentioned, available electromechanical actuators can not solely generate flapping-wing motion and always require complimentary mechanical transmission mechanisms to produce that motion. Therefore, the review will be carried out considering that the selection and design of electromechanical actuators need to be considered in parallel with the selection and design of mechanical transmission mechanisms.
2 Choice of Electromechanical Actuators and Mechanisms
The function of asynchronous flight muscles (Fig. 2b), which cause indirect flight, can be synthesized electromechanically in various ways. Several types of electromechanical actuators and associated mechanical transmission mechanisms, which can be used to synthesize such flapping-wing motion, are illustrated in the following section.
2.1 Choice of Electromechanical Actuators
Based on the excitation signals, the electromechanical actuators can be classified into two categories: (a) voltage-driven; (b) current-driven actuators. Voltage-driven actuators will provide longer endurance time. In reality, we drive flapping mechanisms either by battery or by electrical power adapters. Both are voltage source, which by its definition supplies current for constant voltage. A battery stores electric charge and later depending on the load, it supplies electric current ensuring that the source voltage remains constant. We need current in both voltage-driven actuators as well as in current-driven actuators. However, voltage-driven actuators draw less current than the current-driven actuators. Therefore, current-driven actuators have a tendency to exhaust the battery faster than the voltage-driven actuators. For this reason, voltage-driven actuators can provide longer endurance time than current-driven actuators, if both are operated by sources having equal amount of charge storage. Electric motor, solenoid, shape memory alloy (SMA) actuator, bimetallic strip, etc. are representatives of current-driven actuators. Whereas, piezoelectric actuator, dielectric elastomer actuator, ionic polymer metal composite (IPMC) actuator etc. are representatives of voltage-driven actuators. Current-driven actuators are superior over voltage-driven actuators for providing both higher block force and larger deflection. However, voltage-driven actuators are superior over current-driven actuators for providing higher energy efficiency, and hence, the longer endurance time for flying-systems. Therefore, considering the trade-off between the energy efficiency and wing deflections, which are required for flight, the choice of actuator is not a straight forward decision. Hence, the trade-off between several properties of actuators has kept the actuator selection process open, and the designers and investigators have attempted various actuators to design bio-inspired flapping-wing robots. Apart from this, the structures of electromechanical actuators also have impact on the miniature flying robot designs. The structures of the actuators can be classified into two main categories (Fig. 4): (a) Assembled structure; (b) single structure based on their constructional designs.

Type of electromechanical actuators on the basis of structural design
Electric motors, piezoelectric motors and solenoid-type actuators are representatives of assembled structures. Conventional actuators such as the electric motor and solenoid utilize electromagnetic induction principle, and contain movable or sliding parts in them [8]. Whereas, piezoelectric deflection-actuators, Shape memory Alloy (SMA) actuators, ionic polymer Metal Composite (IPMC) actuators, Dielectric Elastomer Actuators (DEA) are representatives of single structure or monolithic actuators. These single structure actuators generally belong to the smart material family [9]. Piezoelectric actuators are preferably piezoceramic actuators to develop high block force through high stiffness. Piezoelectric actuators and SMA actuators are induced strain actuators, which are often called solid-state actuators [10]. Smart material actuators are single structure in nature and exhibit enormous potential in miniature integrated systems design. In the design of flapping-wing mechanisms, an electromechanical actuator is expected to behave like a single-stroke actuator [10], which is typically an inherent property of smart materials-based actuators. Apart from the positive features mentioned above, the smart materials-based actuators provide high configurability, high customization facility, multi-functionality, high integrability, high scalability, high damage tolerance, and compactness [10]. Table 1 compares the performance of selected electromechanical actuators [11]. The comparison shows that the efficiency in electrostatic actuation can exceed 90%. However, the geometrical dimensions of electrostatic actuators are not suitable for this application [12]. Thermal actuators, namely, bimetallic strip and SMA structures, are current-driven actuators, and exhibit very low energy efficiency (\(<5\%\)). The dielectric elastomer actuators exhibit 60% to 90 % efficiency, but require very high operating voltage (typically in the range of kV), which is difficult to generate internally considering the constraints of MAVs. Researchers also investigated IPMC actuated flapping wing mechanisms [13,14,15]. Although IPMC actuators can produce large deflection at low voltage, but these actuators exhibit low bending stiffness, and hence, low block force, which impedes their ability to overcome aerodynamic drag during flapping. Also, the moisture content in the actuator and the humidity level in the atmosphere severely affect the performance of the IPMC actuators. Whereas, piezoelectric actuators are voltage-driven smart material actuators, and can provide high stiffness, high block force, high energy density, large frequency bandwidth but with low deflection (typically in the range of \(\mu \)m). All these actuators have their own advantages and limitations. Commercial availability of assembled-structure actuators is greater compared to the availability of single-structure actuators. Also, typically assembled-structure actuators (e g., electric motor) can produce both higher deflection and higher block force compared to single-structure actuators (exception being SMA actuators). However, single structure actuators typically provide advantages for being inherently single-stroke generator, less bulky and compatible to batch fabrication, which are favorable for the development of miniature flapping-wing robots. Hence, the choice of actuators for miniature flapping-wing robots is cumbersome. Gerdes et al. [20] have reported a survey confined to the electric motor-driven flapping-wing micro air vehicles.
2.2 Choice of Mechanical Transmission Mechanisms
Flapping-wing MAV design favors single-stroke actuators to synthesize flapping-wing motion. Motors do not belong to the single-stroke actuator category and generate rotational motion [10]. Whereas, the monolithic actuators belong to single-stroke category and can directly produce translational motion [10]. However, all these actuators are unable to solely produce the required kinematic motion necessary for flapping-wing motion. Therefore, these actuators are integrated with suitable mechanical transmission mechanisms to synthesize the required flapping-wing kinematic motion. Figure 5 shows the types of mechanisms, that can be used for this application.

Classification of mechanisms for mechanical transmission
There are two distinct type of mechanisms: (a) Pin-joint-based mechanisms, which are non-monolithic and consist of rigid links and pivot joints (b) Compliant mechanisms, which are monolithic. The compliant mechanisms are of two types: (a) Flexure-hinge-based mechanisms, where the elastic deformations are concentrated in the flexural pivots. (b) Distributed compliant mechanisms, where the deformation is spread throughout the whole structure. A distributed compliant mechanism performs better than a flexure-pivot mechanism [21] because of reduced maximum stress in the structure and high out-of-plane stiffness relative to in-plane stiffness. However, flexure joint-based mechanisms can produce more deflection compared to distributed compliant mechanisms for equal amount of input force. The advantages and limitations of these mechanisms from the perspective of flapping-wing MAV application are discussed in Table 2. The hybrid mechanisms exist to include the advantages of both rigid-link pinned-joint mechanisms and compliant mechanisms wherever necessary. There are few single structure actuators e.g. piezoelectric actuators, which inherently produce very low deflection but with very high block force. The deflections produced by such actuators can be increased by integrating those actuators with displacement amplification mechanisms. This method increases the deflection of the actuator by reducing the force production following the energy conservation principle. A comparative discussion of these mechanisms (Table 2) considering the trade-off between several design parameters suggests that no-mechanism can uniquely satisfy all the requirements for flapping-wing MAV design. Therefore, the designers get flexibility to choose a mechanism giving priority to certain design parameters. As a consequence, we find diversified approaches in literature to design flapping-wing MAVs. Zhang et al. [23] have reported a survey confined to the compliant mechanism-based flapping-wing micro air vehicles. Essentially, there are several different approaches to report a review article on the flapping wing mechanisms, such as electric motor-driven flapping mechanisms, compliant mechanisms for flapping wings, single structure actuators for flapping-wing mechanisms, etc. Some researchers have reported survey on electric motor-driven flapping-wing mechanisms. Whereas, some other researchers have reported survey on compliant mechanisms for flapping-wing motion or a survey on single-structure actuators for flapping-wing motion. However, none of these approaches provide a coherent map of the possible flapping wing mechanisms comprising of electromechanical actuators and transmission mechanisms. Those are the limitations of the earlier reported review articles. Here, in this present article, we have tried to overcome those limitations and comprehensively presented a coherent map of the flapping-wing mechatronic mechanisms, which comprise of both electromechanical actuators and transmission mechanisms.
3 Electro-mechanically Synthesized Flapping-Wing Mechanisms
3.1 Choice of Electromechanically Operated Mechanisms for Flapping Wings
The previous discussion indicates that no specific actuator and no specific mechanism can uniquely satisfy the requirements, which are necessary to generate flapping-wing motion. Hence, the designers are left with several options and can select any electromechanical actuator and any mechanism, which are mentioned in Figs. 4 and 5, respectively, by mentioning the design criteria. Therefore, including all the combinations of Fig. 4 and Figs. 5, 6 provides various options to synthesize electromechanically driven flapping-wing motion. All these combinations have their own advantages and challenges. Since, till now, no flapping-wing MAV has been commercially manufactured and developed with robust maneuver control, hence, the state of the art is still an open area. Following sections illustrate several combinations of electromechanical actuators and mechanical transmission mechanisms, which have been explored until now by several researchers to synthesize flapping-wing motion. This article presents a review on the mechatronic approaches, which have been reported so far in the literature, to synthesize biomimetic flapping-wing mechanisms.

Electromechanically actuated mechanisms, which are suitable for synthesizing bio-mimicked flapping-wing motion. Orange colored boxes represent attempted mechanisms, which have been reported in literature and the white colored boxes represent the unattempted mechanisms
3.2 Electromechanically Synthesized Bio-mimicked Indirect Flight Mechanisms
The mechanisms, which are shown in orange color in Fig. 6, have been reported in the literature; and the mechanisms, which are shown in white color in Fig. 6, have been not reported in the literature so far to the best knowledge of the authors. The indirect flight mechanism has been mimicked predominantly over the direct flight mechanism for its simplicity, and the statistics of the reported literature supports the claimed research endeavor. The bioinspired indirect flight mechanism has been mainly synthesized by (1) Electric motor (2) Electromagnetic coil type linear actuator (3) Smart materials-based actuators, such as piezoelectric bending actuator, IPMC bending actuator, dielectric elastomer actuator, SMA actuator etc. All these approaches will be illustrated in the subsequent discussion.
3.2.1 Electric Motor-Driven Mechanisms
Several researchers have investigated electric motor-driven pin-joint-based mechanisms and hybrid mechanisms to implement flapping-wing motion. Since the rotating shaft of electric motor is a part of the flapping-wing mechanism; hence, electric motor-driven flapping-wing mechanism cannot be a fully compliant mechanism.
Pin joint-based mechanisms: Several researchers have reported electric motor-driven four-bar pin-joint-based rigid-link mechanisms to implement flapping motion by mimicking the functions of asynchronous flight muscles [24,25,26,27]. Figure 7 shows an electric motor-driven four-bar pin-joint based rigid-link mechanism (single-crank mechanism)[25].

Electric motor-driven flapping-wing mechanism using pin joints and four-bar linkages [25]
The researchers also have attempted to improve the energy efficiency of similar type of mechanisms by connecting pre-stretched elastic elements with both the wing [26, 27]. Figure 8a, b shows the linear elastic elements and torsional elastic elements, respectively, which are attached with the wings. These mechanisms can store energy in the elastic elements while flapping-up the wings and releases the energy while flapping-down the wings. Since, a single-crank mechanism drives both the wings in Fig. 7; hence, the wings experience asymmetric flapping motion during the pull-up and pull-down phase of the wings in every cycle.

This problem is resolved by introducing a synchronized double-crank mechanisms [28] to drive a pair of wings (Fig. 9a). In this design, each wing is driven by its own single-crank mechanism. Though the mechanism, which is shown in Fig. 9a, appears similar to the direct flight mechanism of insects (Fig. 2a); however, this is an indirect flight mechanism (Fig. 2b), since both the single-crank mechanisms are driven by a common electric motor.

a Electric motor-driven flapping-wing mechanism using a double-crank mechanisms [28]. b Gear transmission-based flapping-wing mechanism (hummingbird-size flapping wing micro-aerial vehicle) [29]. c A wing-flapping mechanism capable of 3-DOF flapping and rotation developed using three independent servomotors [31, 32]. d Spherical four-bar mechanism based flapping-wing mechanism [32]
The linkage mechanisms, such as, a planner four-bar linkage or a spherical four-bar linkage mechanism, generally are subjected to limitations, such as, high mechanical complexity and low controllability. Therefore, Zhang et al. [29] and Tu et al. [30] have investigated gear transmission-based flapping-wing mechanism, which is shown in Fig. 9b. In this design, a pinion gear, which is driven by the shaft of an electric motor, drives a secondary gear to generate a reciprocating arc motion for flapping each wing. The aforementioned flapping-wing motions have been synthesized using planner four-bar mechanism. McDonald et al. [32] have investigated a spherical four-bar rigid-link mechanism, which is driven by a DC motor, to achieve an approximate spherical flapping-wing motion having favorable aerodynamics (Fig. 9d). There have been efforts also to develop mechanisms for driving two pairs of wings (Fig. 10) by mimicking indirect flight mechanism [33, 34], which is done in (DelFly). In this design, the wing kinematics is similar to the wing kinematics of dragonfly, which flaps two pairs of wings in opposite phase (except that dragonfly uses direct flight mechanism). A flapping-wing MAV with two pairs of wings provides better stability during flight compared to an MAV with single pair of wings.

Hybrid mechanisms In this category, an electric motor can drives flexure-hinge-based compliant mechanism or a distributed compliant mechanism for flapping wings. Since, the associated compliant mechanism, which is used for mechanical transmission, is connected to a driver motor via a revolute joint, hence, this type of actuator-mechanism assembly cannot be a completely compliant mechanism. The flexure-hinge-based hybrid mechanisms for flapping wings have been reported by several researchers [35,36,37]. For instance, few such hybrid mechanisms for flapping wings have been developed by Lau et al. [35], Baek et al. [36] and Gupta et al. [37], and are shown in Fig. 11. In all the three designs, flexure-hinge-based mechanical transmission mechanisms have been driven by dc motors via crank type mechanisms. The advantages of having flexure-hinge-based mechanical transmission over pin-joint-based rigid link mechanism are discussed in Table 2. The design, which is shown in 11b, is operated in resonance mode with the help of an additional spring, which is attached to it. This improvisation helps to efficiently produce a large flap angle. Another type of hybrid flapping-wing mechanism, which is shown in Figure 12, is proposed by Campolo et al. [38]. The design consists of a pair of wings, an elastic element and a dc motor. The motor drives the elastic element in resonance mode by producing a reciprocating circular motion in its rotating shaft, and thus the mechanism produces a flapping-wing motion. The design can produce a flap angle of around \(\pm 31^o\).


DC motor-driven resonance-based direct flapping wing mechanism. a Flapping motion, b an actual prototype [38]
Discussion One common feature of all these single actuator-driven flapping-wing mechanisms, which have been reported in literature and described above, is that the angle of attack of the wings is fixed and can not be changed during flight. These single actuator-driven flapping wing mechanisms exhibit low maneuvering control due to limited flight control surfaces. However, a multiple actuator system can resolve this issue. The usage of auxiliary actuators to change the angle of attack of the wings has been reported in the literature by Khan et al. [31] and Jang et al. [39]. Researchers of University of Delaware reported a rigid link-based flapping-wing mechanism (Fig. 9c), which can generate 3-DOF flapping and rotation of wing [31]. This mechanism uses three servo motors to achieve the desired kinematics in space.
3.2.2 Electromagnetic Coil Actuator-Driven Mechanisms
Ball-joint-based Rigid-link flapping-wing mechanism Electromagnetic coil actuator-driven ball-joint-based rigid-link flapping-wing mechanism has been attempted by Yoon et al. [40]. A pair of electromagnetic coil actuators have been used in this design to generate flapping-wing motion. One electromagnetic coil is placed in the front side and another coil in the rear sides of a ball-joint, which holds the wings. In the beginning of the upstroke, the front coil remains stationary and the rear coil pulls the mechanism downwards. The flapping and twisting motion of the wings have been implemented by moving both the coils synchronously and asynchronously, respectively.
Flexure-hinge-based compliant mechanism On the other hand, Bontemps et al. reported a flexure-hinge based compliant mechanism, which carries an embedded permanent magnet and is driven by an electromagnetic coil type actuator for producing flapping-wing motion [41]. This attempted design is smaller in size compared to the previously mentioned electric motor-driven mechanisms.
3.2.3 Smart Materials-Based Actuator-Driven Mechanisms
Smart materials-based actuators are typically single-structure type. The structure of the actuator deforms to cause an actuation, and inherently exhibits its compliant nature unlike the electric motors and electromagnetic coil type actuators. The mimicking of indirect flight mechanism (Fig. 2b) by such actuators can be achieved by several configuration. Two such configurations are shown in Fig. 13. Figure 13a,b shows smart materials-based actuator-driven distributed compliant mechanism and flexure-hinge-based mechanism, respectively, for flapping wings. Several smart material-based actuators, such as, piezoelectric actuator, dielectric elastomer actuator, IPMC actuator and SMA actuator, have been reported so far in the literature to synthesize flapping-wing motion. These actuators are discussed in the following section. Since smart material-based actuators are of single-stroke type, hence, the front view of these mechanisms (Fig. 13) resemble the indirect flight mechanism (Fig. 2b) unlike the motor-driven mechanisms. This reflects the simplicity of the smart material-based flapping-wing mechanisms over the motor or electromagnetic coil-driven flapping-wing mechanisms.
Distributed compliant mechanism Distributed compliant mechanism consists of jointless flexible structure. If a force is applied to this type of mechanism, the whole structure of the mechanism deforms and if the applied force is withdrawn, then the structure goes back to its original state due to the inherent restoring force developed by its own structural elasticity.

Smart materials-based actuator driven. a Distributed compliant mechanism for flapping-wing. b Flexure hinge-based mechanism for flapping wing
Piezoelectric actuators are compliant in nature. These materials are of two types: (1) Piezoceramics and (2) Piezoelectric polymer film. Generally, piezo-ceramics are preferred for actuation. Table 1 shows that a piezoelectric actuator can be a good choice for this application considering the trade-off between several design parameters. However, a piezoelectric bending actuator produces low deflection with high block force. The deflection can be increased by reducing the block force using a displacement amplification mechanism. In that case, the associated mechanical transmission mechanism serves both deflection amplification and reciprocating flapping motion generation purposes [42, 43]. Figure 14a,b shows two different distributed compliant mechanisms, which can be driven by piezoelectric actuators to produce flapping wing motion [43]. The inherent electro-elastic property of the piezoelectric actuators helps to recover elastic energy, which is stored during the flapping motion. The distributed compliant mechanisms can exhibit efficient performance in their resonance modes. However, all the applications can not be executed at resonant frequencies.

A similar type of topology has been adopted to develop a flapping-wing mechanism using an IPMC bending actuator-driven distributed compliant mechanism (Fig. 15a) [44].

An IPMC actuator-driven flapping-wing mechanism inherits two main advantages: (a) low driving voltage (typically in the range of few volts, which is very less when compared to the driving voltage of piezoelectric actuators, which require typically in the range of few hundred volts), (b) high deflection (typically in the range of centimeter, which is very high compared to the deflection of a piezoelectric actuators, which produce deflection typically less than 1 mm. However, IPMC actuator-based mechanisms show limitations due to low block force and poor performance in low moisture level. Some researchers have also attempted to develop Dielectric Elastomer Actuator (DEA)-driven ring type compliant mechanism for synthesizing flapping wing motion. In this design, a DEA is connected along the diameter of a flexible ring type structure (Fig. 15b) [45, 46]. As the DEA contracts, the ring expends vertically, and then returns to the original unscratched shape by its inherent structural elasticity. A pair of wings are attached at the top of the mechanism to produce flapping-wing motion.
Flexure hinge-based compliant mechanism A typical design of smart-materials-based actuator-driven flexure-hinge-based compliant mechanism is shown in Fig. 13b. In this design, a smart-material-based actuator drives a compliant mechanism to flap a pair of wings to mimic indirect flight of insects. Several researchers have worked on this design [47,48,49]. The initial design of Harvard RoboBee of insect-size has been designed and developed using this topology. In this work, a pair of wings are flapped by a piezoelectric bending actuator through a flexure hinge-based compliant mechanism (Fig. 16b) [47].

Similar types of wing-actuation method were explored further by some researchers, who have reported an even smaller micro air vehicle named as a pico-air vehicle [48]. The same flapping mechanism has inspired some investigators to design and develop a quadcopter type flapping wing MAV having four pairs of flapping-wings [49]. Apart from the piezoelectric actuator, a few researchers have investigated shape memory polymer (SMP) actuator-driven flexure hinge-based flapping-wing mechanism. A wing is attached with a body by a flexure hinge, which is constructed by shape memory polymer material [50]. However, the electro-thermo-mechanical property of SMA imparts two major challenges in this design: (a) low flapping bandwidth and (b) low energy efficiency.
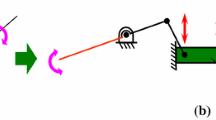
Hybrid mechanism: Another flapping-wing mechanism is based on a hybrid mechanism, which includes both pin joint-based mechanical transmission and a DEA-driven-compliant structure to form actuator-mechanism assembly. Fig. 17 shows such a dielectric elastomer actuator driven hybrid mechanism for flapping wings [51]. In this design, a DEA expands and contracts vertically, and then drives a pin joint-based mechanism to flap a pair of wings.

Dielectric elastomer actuator-driven pin-joint based mechanism for flapping wings [51]
3.3 Electromechanically Synthesized Bio-mimicked Direct Flight Mechanisms
The direct flight mechanism, in which each wing is independently driven by a pair of muscles, is shown in Fig. 2a. A critical constraint in aerial robotics is that every single actuator, which can improve the flight control performance, can also affect the payload capacity by loading the system. Hence, inclusion of additional actuators to improve flight performance by direct flapping mechanism faces critical challenges. This is one of the reasons for which the engineering design of such wing-actuation method has not been attempted by many researchers.
3.3.1 Electric Motor-Driven Mechanisms
Hybrid mechanism Figure 18 shows an electric motor-driven hybrid mechanism for flapping wings which mimics the direct flight mechanism of insect.

A direct control mechanism for flapping wings using two dc motors and hybrid mechanism [52]
In this design, each wing is actuated by a dedicated DC motor, spring and wing-fixture assembly that act together to produce a reciprocating motion to synthesize wing-flapping [52]. Since both the wings are actuated independently, independent wing control is possible in this design unlike in the case of the indirect flight mechanism discussed in the previous section.
3.3.2 Smart Materials-Based Actuator-Driven Mechanisms:
Distributed compliant mechanism: In a piezoelectric fan, a wing-type-structure is directly attached at the tip of a piezoelectric bending actuator (Fig. 19a). Since each wing can be driven by a dedicated piezo-actuator, this design also resembles with the direct flight mechanism of insect. A few researchers have attempted this design to conceptualize flapping-wing MAV [53]. A single actuator-driven piezoelectric fan can cause only flapping. Therefore, some researchers have investigated double actuator-driven piezoelectric fan to twist the wings on the stroke plane (Fig. 19b) [54]. However, it is challenging to get satisfactory flap-angle using these designs.

Flexure hinge-based compliant mechanism A piezoelectrically actuated flexure-hinge-based flapping wing mechanism mimicking the direct flight of insect is shown in Fig. 20 [55]. The figure shows that each wing is driven by a dedicated piezoelectric bending actuator, which causes flapping independently. However, the wing twisting mechanism is not present in this design.

Flapping-wing MAV design with two dedicated piezoelectric actuators to control two wings independently [55]
The recent versions of Harvard RoboBee include wing twisting mechanism. The researchers have incorporated stroke plane deviation mechanism for the wings, by incorporating two orthogonal piezoelectric actuators and a flexure hinge-based compliant mechanism, which is shown in Fig. 21a [56]. The recently reported Harvard RoboBee has two independent piezoelectric bending actuators for twisting each wing independently. The researchers have further improved the design, by incorporating two pairs of flapping wings in RoboBee (Fig. 21b) [57].

3.4 Electromechanically Synthesized Bio-mimicked Active Wing Actuation
In active wing actuation, flight muscles are distributed over the wing of natural flyers [58]. The bio-mimicking of active wing actuation technique is rarely reported in literature due to its complexity. However, presently the engineers have started working on such designs [59, 60]. Recently Festo’s Bionic Learning Network has developed a motor-mechanism-driven SmartBird that can mimic the active flapping-wing kinematics of an ornithopter and has shown a reasonably well aerodynamics and maneuverability [59]. However, Fig. 22 shows an attempt by researchers to develop a similar type of mechanism, which is a bio-inspired bat-wing design consisting of multiple SMA actuator-driven flexure hinges [61, 62]. Although, multiple SMA actuators have been distributed over the wing-skeleton, but the design complexity is much less than the complexity of actual Active Wing Actuation mechanism.

4 Concluding Remarks
Considering the low-speed aircraft, the helicopter technology is an established and mature technology. The proposal to design flapping-wing MAV has been revived in twenty-first century by observing the limitations of helicopter technology at its scaled down versions at low Reynolds number. Therefore, any effort to design a flapping-wing MAV must show some distinct advantages over the helicopter technology at comparable dimension to justify the efforts to develop flapping-wing MAVs. The review has addressed the motivation behind bio-inspired flapping-wing mechanism design. The discussion has emphasized with justification that the selection and design of electromechanical actuators should be considered in parallel with the selection and design of mechanical transmission mechanisms to develop productive flapping-wing system. Therefore, the survey has focussed on the mechatronic approaches, which have been reported so far in the literature, to synthesize biomimetic flapping-wing mechanisms. The discussion has included the advantages and challenges of those mechatronic approaches. Figure 6 and Table 3 show mapping of several actuators and mechanical transmission mechanisms related to flapping-wing MAV applications that have been reported in the literature. The mapping reveals that few specific actuator-mechanism assemblies have been predominantly investigated over other assemblies by most of the researchers.
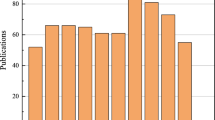
Figure 23 shows a publication statistics on electromechanically actuated flapping-wing mechanisms considering a sample group of forty five research articles.

Publication statistics on electromechanically actuated flapping-wing mechanisms considering a sample group of 45 research articles a Passive wing actuation vs. Active wing actuation. b Indirect flight mechanisms vs. direct flight mechanisms. c Electric motor-driven mechanisms vs. Electromagnetic coil-driven mechanisms vs. Smart material actuators-driven mechanisms. d Assembled structure mechanisms vs. single structure mechanisms
Considering the aspects of bio-mimicking, the statistics reveals that passive wing actuation mechanism has been attempted in far more ways compared to the active wing actuation mechanism (Fig. 23a). In the passive wing actuation category, the indirect flight mechanism has been attempted in far more ways compared to the direct flight mechanism (Fig. 23b). This leads to a conclusion that indirect flight mechanism being the simplest flying mechanism has been attempted by the maximum number researchers. Considering the aspects of engineering design, the statistics reveal that electric motor driven flapping mechanism and smart materials-based actuator-driven flapping mechanisms have received almost equal attention (Fig. 23c). The comparative discussion concludes that there is no unique solution to design flapping-wing mechanism, and all the assemblies exhibit capabilities to generate flapping-wing motion in their own way. The discussion in the article concludes that all the approaches have their own advantages, limitations, and trade-offs. The discussion also concludes that all these approaches are beneficial in their own way. Therefore, the selection of appropriate design definitely depends on the type of application and the constraints in the requirements. The objective of this review article is just to present all possible approaches available in this area reported so far to the best of authors’ knowledge. We agree with the reviewer that, the designers finally have to choose the approach, which will be appropriate for their applications subjected to their constrained requirements. Although, several mechatronic approaches have been tested on bench-top experimental setup, but only few mechanisms have been installed in actual MAV, so far, to execute independent flight. Table 3 shows the testing-status of the reported mechanisms. Therefore, the assemblies, which have been investigated only on bench-top experimental setup, but not on a flying system prototypes, must be explored further to examine their potential to make a robot fly. On the other hand, the mechanisms, which have shown capability to execute successful flight, must be explored further to improve their primarily requirements, such as, controlled maneuvering facility, high endurance time and high payload capacity to accomplish a task, which is the primary purpose of these systems. High payload capacity will allow to carry large batteries, which will help to increase the flight endurance time. These objectives can be fulfilled by performing structural design optimization, flight dynamics optimization, power management optimization and control-surface analysis. All these mechanisms must be explored further to see their compatibility to existing 3D printing technology for batch fabrication. Single-structure-based flapping-wing mechanisms are suitable for easy 3D printing and batch fabrication. These single structure mechanisms exhibit best performance in their resonance mode, but the performance drops if the flapping frequency deviates from the resonant frequency. Therefore, if a flapping-wing MAV is designed to fly with a narrow frequency bandwidth around a fixed high resonant frequency, single structure mechanisms can be the preferred option. In natural flyers, the wing-flapping frequency can be as low as one beat per minute for an adult eagle [63] and as high as more than 700 Hz for an adult mosquito [64]. This provides us a wide range of operating frequency to develop bio-inspired flapping-wing MAVs. The fast single-stroke actuators, such as, piezoelectric actuator along with a distributed compliant mechanical transmission mechanism, which can provide a high resonant frequency, can be used to design a high-frequency narrow-band MAVs. Whereas, the extremely slow single-stroke actuators, such as SMA actuator along with pin-joint or ball-joint or hybrid or flexure hinge-based mechanisms, which can provide large deflection along with very high block force, can be investigated further to examine their capability for being a good choice of large-scale but low-frequency MAVs. The natural flyers do not exhibit one unique solution, and Table 3 shows many empty places. Therefore, the other unattempted combinations may also be investigated to explore their capabilities for this application. There is another important aspect, which throws a challenge to the development of bio-inspired flapping-wing MAVs. Since the available electromechanical actuators are not as efficient as biological muscles; hence, every invention of new actuator, which exhibits a better performance compared to the existing actuators, open a new paradigm to redesign an existing flapping-wing MAV. The same exercise is applicable to the fabrication of a miniature mechanism, which provides a desired wing kinematics, due to the limitations in existing 3D printing technology. The scope of this review article is limited to the mechatronic approaches for mimicking flapping-wing mechanisms of natural flyers for developing flapping-wing MAVs. In a close relation to the above mentioned area, an extensive research is going on to develop new designs of compliant mechanisms, which can mimic the natural flyers in a better way. For an instance, a compliant spine design is one of those mechanisms [65]. Extensive research is also going on to design several wing kinematics favourable for flapping-flight. For an instance, as discussed in Fig. 1b, c, the wing-tip of natural flyers sometime follow a pattern of figure-eight. Jiang et al. have reported an investigative work to mimic figure-eight wing-tip trajectory [66]. Nguyen et al. have reported a study on the energy-optimal hovering wing kinematics of a hawkmoth using neural-network approach [67]. However, the contribution of all the aspects, such as, identification, design and development of mechanisms for complex wing kinematics, high energy density batteries, light weight miniature sensor, optimized MAV structure, optimized control surfaces for efficient flight control, and finally, the swarm intelligence and multi-agent control, are equally impotent for the implementation of successful flapping-wing MAVs and accomplishments of desired tasks.
References
Shyy W, Lian Y, Tang J, Viieru D, Liu H (2007) Aerodynamics of low Reynolds number flyers, vol 22. Cambridge University Press, Cambridge
Han JH, Lee JS, Kim DK (2009) April. Bio-inspired flapping UAV design: a university perspective. In: Health monitoring of structural and biological systems 2009. SPIE, Vol 7295, pp 466–477
Grimaldi D, Engel MS, Engel MS, Engel MS (2005) Evolution of the Insects. Cambridge University Press, Cambridge
Karásek M (2014) Robotic hummingbird: Design of a control mechanism for a hovering flapping wing micro air vehicle. PhD. Thesis, p. 28, Universite libre de Bruxelles: Bruxelles, Belgium
Deora T, Singh AK, Sane SP (2015) Biomechanical basis of wing and haltere coordination in flies. Proc Natl Acad Sci 112(5):1481–1486
Whitney JP, Wood RJ (2012) Conceptual design of flapping-wing micro air vehicles. Bioinspiration Biomimetics 7(3):036001
Fearing RS, Wood RJ (2009) Challenges for 100 milligram flapping flight. Flying Insects and Robots. Springer, Berlin, Heidelberg, pp 219–229
Hughes A, Drury B (2013) Electric motors and drives: fundamentals, types and applications. USA: Newnes, Forth Ed
Chopra I, Sirohi J (2013) Smart structures theory, vol 35. Cambridge University Press, Cambridge
Gomis-Bellmunt O, Campanile LF (2009) Design rules for actuators in active mechanical systems. Springer Science & Business Media, New York
Karpelson M, Wei GY, Wood RJ (2008) A review of actuation and power electronics options for flapping-wing robotic insects. In: 2008 IEEE international conference on robotics and automation, 779–786
Bao M (2005) Analysis and design principles of MEMS devices. Elsevier Science, First Ed., USA, 2005
Kim HI, Kim DK, Han JH (2007) Study of flapping actuator modules using IPMC. In Electroactive Polymer Actuators and Devices (EAPAD) 2007. International Society for Optics and Photonics. 6524, p 65241A
Mukherjee S, Ganguli R (2010) A dragonfly inspired flapping wing actuated by electro active polymers. Smart Struct Syst 6(7):867–887
Swarrup JS, Ganguli R, Madras G (2019) Studies to improve the actuation capability of low-frequency IPMC actuators for underwater robotic applications. ISSS J Micro Smart Syst 8(1):41–47
Cha Y, Porfiri M (2014) Mechanics and electrochemistry of ionic polymer metal composites. J Mech Phys Solids 71:156–178
Hunter IW, Lafontaine S (1992) A comparison of muscle with artificial actuators. In: Technical Digest IEEE solid-state sensor and actuator workshop, 178–185
Wood RJ, Steltz E, Fearing RS (2005) Optimal energy density piezoelectric bending actuators. Sens Actuators A 119(2):476–488
Chattaraj N, Ganguli R (2016) Electromechanical analysis of piezoelectric bimorph actuator in static state considering the nonlinearity at high electric field. Mech Adv Mater Struct 23(7):802–810
Gerdes JW, Gupta SK, Wilkerson SA (2012) A review of bird-inspired flapping wing miniature air vehicle designs. J Mech Robot 4(2):021003
Yin L, Ananthasuresh GK (2003) Design of distributed compliant mechanisms. Mech Based Des Struct Mach 31(2):151–179
Howell LL (2013) Compliant mechanisms. 21st century kinematics. Springer, London, pp 189–216
Zhang C, Rossi C (2017) A review of compliant transmission mechanisms for bio-inspired flapping-wing micro air vehicles. Bioinspiration Biomimetics 12(2):025005
Hassanalian M, Abdelkefi A (2019) Towards improved hybrid actuation mechanisms for flapping wing micro air vehicles: analytical and experimental investigations. Drones 3(3):73
Tsai BJ, Fu YC (2009) Design and aerodynamic analysis of a flapping-wing micro aerial vehicle. Aerosp Sci Technol 13(7):383–392
Madangopal R, Khan ZA, Agrawal SK (2006) Energetics-based design of small flapping-wing micro air vehicles. IEEE/ASME Trans Mechatron 11(4):433–438
Khan ZA, Agrawal SK (2007) Design and optimization of a biologically inspired flapping mechanism for flapping wing micro air vehicles. In: Proceedings 2007 IEEE International Conference on Robotics and Automation, 373–378
Kim DK, Kim HI, Han JH, Kwon KJ (2008) Experimental investigation on the aerodynamic characteristics of a bio-mimetic flapping wing with macro-fiber composites. J Intell Mater Syst Struct 19(3):423–431
Zhang J (2015) Design and control of a hummingbird-size flapping wing micro aerial vehicle. Doctoral dissertation, Purdue University, 2015
Tu Z, Fei F, Deng X (2020) Untethered flight of an at-scale dual-motor hummingbird robot with bio-inspired decoupled wings. IEEE Robot Autom Lett 5(3):4194–4201
Khan ZA, Agrawal SK (2005) Force and moment characterization of flapping wings for micro air vehicle application. In: IEEE Proceedings of the 2005, American Control Conference, 1515–1520
McDonald M, Agrawal SK (2010) Design of a bio-inspired spherical four-bar mechanism for flapping-wing micro air-vehicle applications. J Mech Robot 2(2):021012
De Croon GC, Groen MA, De Wagter C, Remes B, Ruijsink R, van Oudheusden BW (2012) Design, aerodynamics and autonomy of the DelFly. Bioinspiration Biomimetics 7(2):025003
Caetano JV, Percin MUSTAFA, Van Oudheusden BW, Remes B, De Wagter C, de Croon GCHE, De Visser CC (2015) Error analysis and assessment of unsteady forces acting on a flapping wing micro air vehicle: free flight versus wind-tunnel experimental methods. Bioinspiration Biomimetics 10(5):056004
Lau GK, Chin YW, Goh JTW, Wood RJ (2014) Dipteran-insect-inspired thoracic mechanism with nonlinear stiffness to save inertial power of flapping-wing flight. IEEE Trans Robot 30(5):1187–1197
Baek SS, Ma KY, Fearing RS (2009) Efficient resonant drive of flapping-wing robots. In: 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2854–2860
Gupta SK, Bejgerowski W, Gerdes J, Hopkins J, Lee L, Narayanan MS Krovi V (2014) An engineering approach to utilizing bio-inspiration in robotics applications. In: Biologically inspired design. Springer, London, pp 245–267
Campolo D, Azhar M, Lau GK, Sitti M (2012) Can DC motors directly drive flapping wings at high frequency and large wing strokes? IEEE/ASME Trans Mechatron 19(1):109–120
Jang JH, Yang GH (2018) Design of wing root rotation mechanism for dragonfly-inspired micro air vehicle. Appl Sci 8(10):1868
Yoon S, Kang LH, Jo S (2011) Development of air vehicle with active flapping and twisting of wing. J Bionic Eng 8(1):1–9
Bontemps A, Vanneste T, Paquet JB, Dietsch T, Grondel S, Cattan E (2012) Design and performance of an insect-inspired nano air vehicle. Smart Mater Struct 22(1):014008
Stanford B, Beran P (2011) Conceptual design of compliant mechanisms for flapping wings with topology optimization. AIAA J 49(4):855–867
Chattaraj N, Ananthasuresh GK, Ganguli R (2021) Design of a distributed compliant mechanism using spring-lever model and topology optimization for piezoelectrically actuated flapping wings. Mech Adv Mater Struct 28(2):118–126
Zhao Y, Xu D, Sheng J, Meng Q, Wu D, Wang L, Sun D (2018) Biomimetic beetle-inspired flapping air vehicle actuated by ionic polymer-metal composite actuator. Appl Bionics Biomech 2018:3091579
Lau GK, Lim HT, Teo JY, Chin YW (2014) Lightweight mechanical amplifiers for rolled dielectric elastomer actuators and their integration with bio-inspired wing flappers. Smart Mater Struct 23(2):025021
Lau GK, Chin YW, La TG (2017) Development of elastomeric flight muscles for flapping wing micro air vehicles. In: Electroactive Polymer Actuators and Devices (EAPAD) 2017. International Society for Optics and Photonics, vol 10163, p 1016320
Pérez-Arancibia NO, Ma KY, Galloway KC, Greenberg JD, Wood RJ (2011) First controlled vertical flight of a biologically inspired microrobot. Bioinspiration Biomimetics 6(3):036009
Mateti K, Byrne-Dugan RA, Rahn CD, Tadigadapa SA (2012) Monolithic SUEX flapping wing mechanisms for pico air vehicle applications. J Microelectromech Syst 22(3):527–535
Zhou S, Zhang W, Zou Y, Ou B, Zhang Y, Wang C (2018) Piezoelectric-driven self-assembling micro air vehicle with bionic reciprocating wings. Electron Lett 54(9):551–552
Hines L, Arabagi V, Sitti M (2012) Shape memory polymer-based flexure stiffness control in a miniature flapping-wing robot. IEEE Trans Robot 28(4):987–990
Cao C, Burgess S, Conn AT (2019) Toward a dielectric elastomer resonator driven flapping wing micro air vehicle. Front Robot AI 5:137
Hines L, Campolo D, Sitti M (2013) Liftoff of a motor-driven, flapping-wing microaerial vehicle capable of resonance. IEEE Trans Robot 30(1):220–232
Guo S, Li D, Wu J (2012) Theoretical and experimental study of a piezoelectric flapping wing rotor for micro aerial vehicle. Aerosp Sci Technol 23(1):429–438
Chung HC, Kummari KL, Croucher SJ, Lawson NJ, Guo S, Huang Z (2008) Coupled piezoelectric fans with two degree of freedom motion for the application of flapping wing micro aerial vehicles. Sens Actuators A 147(2):607–612
Doman DB, Oppenheimer MW (2014) U.S. Patent No. 8,700,233. Washington, DC: U.S. Patent and Trademark Office
Finio BM, Whitney JP, Wood RJ (2010) Stroke plane deviation for a microrobotic fly. In 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, pp 3378–3385
Jafferis NT, Helbling EF, Karpelson M, Wood RJ (2019) Untethered flight of an insect-sized flapping-wing microscale aerial vehicle. Nature 570(7762):491–495
Chin DD, Matloff LY, Stowers AK, Tucci ER, Lentink D (2017) Inspiration for wing design: how forelimb specialization enables active flight in modern vertebrates. J R Soc Interface 14(131):20170240
Send W, Fischer M, Jebens K, Mugrauer R, Nagarathinam A, Scharstein F (2012) Artificial hinged-wing bird with active torsion and partially linear kinematics. In: Proceeding of 28th Congress of the International Council of the Aeronautical Sciences, p 10
Jiang H, Zhou C, Xie P (2016) Design and kinematic analysis of seagull inspired flapping wing robot. In: 2016 IEEE International Conference on Information and Automation (ICIA). IEEE, pp 1382–1386
Furst SJ, Bunget G, Seelecke S (2012) Design and fabrication of a bat-inspired flapping-flight platform using shape memory alloy muscles and joints. Smart Mater Struct 22(1):014011
Colorado J, Barrientos A, Rossi C, Breuer KS (2012) Biomechanics of smart wings in a bat robot: morphing wings using SMA actuators. Bioinspiration Biomimetics 7(3):036006
Bustamante J, Donezar JA, Hiraldo F, Ceballos O, Travaini A (1997) Differential habitat selection by immature and adult Grey Eagle-buzzards Geranoaetus melanoleucus. Ibis 139(2):322–330
Ogawa KI, Kanda T (1986) Wingbeat frequencies of some anopheline mosquitoes of East Asia (Diptera: Culicidae). Appl Entomol Zool 21(3):430–435
Wissa AA, Tummala Y, Hubbard JE Jr, Frecker MI (2012) Passively morphing ornithopter wings constructed using a novel compliant spine: design and testing. Smart Mater Struct 21(9):094028
Jiang S, Hu Y, Li Q, Ma L, Wang Y, Zhou X, Liu Q (2021) Design and analysis of an innovative flapping wing micro aerial vehicle with a figure eight wingtip trajectory. Mech Sci 12(1):603–613
Nguyen AT, Tran ND, Vu TT, Pham TD, Vu QT, Han JH (2019) A neural-network-based approach to study the energy-optimal hovering wing kinematics of a bionic hawkmoth model. J Bionic Eng 16(5):904–915
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Chattaraj, N., Ganguli, R. Mechatronic Approaches to Synthesize Biomimetic Flapping-Wing Mechanisms: A Review. Int. J. Aeronaut. Space Sci. 24, 105–120 (2023). https://doi.org/10.1007/s42405-022-00527-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42405-022-00527-7