
Abstract
This paper proposes a method and results of modeling the thrust force (F) and torque (M) generated by the propeller working behind the hull in water environment for the container vessel Fortune Navigator (CV. FN), that belongs to the Vietnam Ocean Shipping Joint Stock Company. The input data for modeling consists of periodic-changing signal pairs (F, M) that are obtained by authors from the hull–propeller numerical simulations for CV. FN using CFD method and commercial software STAR/CMM+. The input database is obtained based on design of experiments (DoE) for CV. FN with: Draft varies from ballast to full load; the draught difference (Trim = TA − TF), considered as a disturbance (where: TA—draft of the aft, TF—draft of the forward) and the changing propeller speed. The propeller’s excited force/torque are transformed from the time domain to the frequency domain by the FFT method after re-sampling twice the input data. This implementation method ensures that the data is sampled in a constant time step, and the sample number of the extracted data vectors (T and M) is applied to the exact FFT-algorithm. The database obtained from processing F and M signals in the frequency domain is the input for regression modeling to determine force and moment components according to the impact factors. Research on signal processing and modeling the forces and moments are carried out on the LabView (NI, USA Company).
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
The propeller torque and thrust when the propeller works behind the hull in the water environment are variable parameters and changes following the propeller working cycle. The mean torques of the engine and the propeller are used to evaluate the power of the main propulsion plant (MPP) at steady-state rotation. The average power, torque, and rotational speed are used to determine the operating (static) mode of the engine-propeller system. Similarly, the mean propeller’s thrust is equal the average hull resistance when the ship works in the water. This feature is combined with the ship's speed set at the average propeller’s rotary revolution give an estimation of the hull and propeller powers, and working efficiencies.
The periodic-variable components of the excited torque M (or Thrust, F) generated by the propeller affects the excited torsional vibrations (the axial vibrations) on the MPP. The excited torsional moment and axial force (ETM, EAF) of the propeller are expressed as harmonic functions, which is a multiple of the number of propeller blade zp. It is necessary to pay attention to the amplitudes orders 1, 2, and 3, or harmonic degree: k = zp, 2zp, and 3zp.
The study of vibrations (torsional and axial) on the MPP needs to determine the exciting forces/moments with harmonics of 1st, 2nd, or 3rd orders of the propeller’s blade number (zp) because the propeller can lead to some resonance states.
The American Bureau of Shipping (ABS) [1] provides the results of more 20 real ship studies of the propeller’s torque and axial force. In the reference [1], there are not shown any specific boundary condition and research using method. In other aspects, the results show that the amplitudes of the torque harmonics AM (k = zp, 2zp, and 3zp) are expressed through the mean torque M0 (same for the axial force F0). In [2], Yuriy Batrak also pointed out that there is not any information about the force/torque calculation used by the CFD method. That raises the study problem to determine ETM and EAF by CFD method in this paper.
The commercial professional software STAR-CCM+, developed by SIEMENS, is adapted in the hull–propeller working investigations in water environment. In order to ensure accurate calculation results, the finite elements number of the calculated area surrounding the hull is selected according to detailed instructions of the company [7]. In addition, the hydrodynamic calculation method (CFD) is usually used as RANSE (Reynolds Averaged Navies-Stokes Equations) to ensure real-time results [3].
2 Materials and Methods
2.1 Making Torque and Thrust Signals from Hull-Propeller Simulation by CFD
Using CFD method and STAR-CCM+ software the two digital array signals in real-time are obtained moment M(t) and force F(t). Under the received convergence data we choose some Nc cycles (about 3 ÷ 5) for noise processing later. In the last Nc cycles, often the time step is different dt(m) = k.dtmin, k = 1, 2, we re-sample with step dt0 = dtmin = 1 (ms) as the smallest step [see Eq. (1)].
From Eq. (1), the outputs are two steady periodic signals M(t) and force F(t), with the same dt = 1 ms. Proposing the propeller speed np (rpm), one revolution will be extracted N1c samples (calculated by Eq. (2), the integer part of the rounded number).
And, a chunk of data with Ns = Nc. N1c samples, where Nc is the number of cycles to be sampled Nc = 3, 4 or Nc = 5.
[.]—The integer part is rounded of the sample numbers.
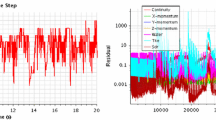
The transformation of the signal is done by the FFT algorithm, where the number of samples in NFFT = 2^k = 512, for example, k = 9, NFFT = 512. Resampling by “spline” approximation method, we can use the module included in LabView to build signal processing software (VI). The average propeller thrust and torque vectors for one cycle from Nc cycles were resampled (MRS) with resampling in the NRS = 512 samples. The FFT transform, coded in LabView with the FFT(.) statement, is an example of a filtered signal of torque (XM).
where: ω, zp—angular velocity, number of blades of propeller; M0—average value of torque; AM, ζ—amplitude and phase of the harmonics.
Formula (4) represents the signal according to all harmonics from 1 to Mp, but only focuses on two harmonics that have practice: k = 1, zp, 2zp.
2.2 Building Signal Processing Module on LabView
Simulating with CCM+, the input signal is large for one experiment (about 5000 samples) and saved in *.csv format. Therefore, it is necessary to code in high-level code programming to read *.csv recorded data files. The authors create a subVI that reads *.csv, relatively in LabView.
Resample for signal torque (M) of 1 cycle with N1c samples, to get a new array of the same cycle with 512 samples, we create two sequences of variables x1 and x2 and follow the command:
In MathScripts some statements are used for research:
The FFT for the resampled vector M2, obtain the amplitude (R) and phase (ph) values of the complex number harmonics (z) by the corresponding command:
2.3 Simulation Plan for MV. FN
MV.FN is a container ship of VOSCO as the studied object of the article. The basic parameters of the MV main propulsion system. The FN in the norminal regime when the ship is newly built, at the sea-trial tests, is significant in the torque/force simulation (shown in Tables 1 and 2 [8]).
Checking the reliability of the simulation model with real data of MV.FN at the sea-trial regimes shows the difference in power δP = [Pw(sea-trail) − Pw(CFD)]/Pw(sea-trails) < 13% (Table 2) between the two methods are acceptable in practice. Since then, continue to use 3-D model using CFD for the design of experiments (DoE).
From the actual operation data of the MPP of CV.FV, we consider the following: the ship usually operates with an engine rotation of about 173.5 (rpm), or: nt% = 82.5 (M.C.R), load LI = 56.4% when loading (Load Cargo Index) LCI% = 100, corresponding to mean draft: Dm = 7.8 ÷ 8.8 (m). The mode of the train running without cargo, (ballast) at the average draft is about Dmb = 4.4 m. Therefore, the authors simulated in different loading regimes corresponding to draft from ballast to full mode, different trims (cause of noise), as shown in Table 3.
2.4 Mathematical Model of Fm(Draft) and Mm(Draft)
The results of the average thrust Fm and average torque Mm generated by the propeller at each cargo-loading—Dm (Draft, m) need to be set. To get a suitable model, we draw the whole graph in the form of Y(Dm). And from there, we can select each variation segment of the D-axis and build the corresponding regression model. Analyzing the representation with the results of the regression model for the entire Draft Dm = [4.4, 9.5] (m), we find that both thrust and torque cannot follow a common model. From there, it is necessary to divide each segment to perform modeling to ensure the accuracy and reliability of the tree according to the corresponding Fisher statistical criteria.
2.5 Harmonic Amplitudes of the Force AF(Tm, kp) and Torque AM(Mm, kp)
At each mode of average draft Dm(m), we have determined the average thrust and moment through the regression functions mentioned in (2.3) corresponding to the using rotation speed (n, rpm). To calculate the axial and torsional vibrations of the shaft system, we need to determine the excited harmonics by the propeller. According to the recommendations of the ABS registry (USA), as well as the experience of Prof. D.D.Luu, only need to determine two or three harmonic degrees of the propeller. This is also consistent with the investigation of the total Mh harmonics for diesel engines: Mh = 12 for two-stroke engines, and Mh = 25 - for four-stroke engines. The first, second or third order (kp1, kp2, kp3) for the forcing forces/moments will be respectively: kp1 = zp, kp2 = 2zp, kp3 = 3zp. The amplitude of the force/moment is expressed through the corresponding force/moment mean values [1].
3 Results and Discussion
3.1 Accuracy of 3-D Model for Simulation by CFD for VT-CV
The first requirement is that the 3-D model must be suitable for the object calculated by CFP. The methodology for testing the confidence of the 3-D model is that the CFD results compared with the actual ship results tested at the same boundary conditions are similar. The results are shown in Table 2 with an error of 13% of propeller powers between the sea-trial tests and the CFD simulation, allowing a reliable 3-D model to continue the simulation in the future.
3.2 Synthesizing Simulation Results Fm(Dm) and Mm(Dm)
In Table 4 are shown the regressive models of the thrust Fm(Dm) and torque Mm(Dm). For example, in the Dm = [6.85 9.54] (m), the Fm and Mm are calculated:
3.3 Harmonic Amplitudes of Propeller Thrust Force and Torque
After the FFT, the amplitudes are expressed on a relative scale dividing by the parameter’s mean value. Table 5 shows the results obtained in some experiments of simulating the propeller force/torque harmonics according to the experimental order.
4 Conclusion
The database of the propeller’s thrust and torque via the draft is built by the CFD method using software STAR/CMM+. The article has built a DoE to verify the 3-D model of MV.FN used with CFD in accordance with test data at sea-trial. The test results show that the difference in propeller powers between simulation and experiment is less than 13%. The 3-D model was built for the MV.FN propeller hull-propeller is reliable enough for simulations with the CFD method in other experiments of the offered simulation DOE. The simulation DoE (Table 3) simulated on CCM+ with draft from ballast to full cargo loading. The obtained from simulation data were twice-resampled and processed in real-time and in frequency domain. summarizing the force/torque results we received regressive models Fm and Mm via draft. The obtained database allows for determining the harmonics amplitudes of the propeller force and torque.
References
ABS (2018) Guidance notes on ship vibration.
Batrak Y (2022) Tortional vibration calculation issues with propulsion system. http://www.shaftdesigner.com/. Accessed from 15 Mar 2022
Luu DD et al (2020) Numerical study on the influence of longitudinal position of centre of buoyancy on ship resistance using RANSE method. Nav Eng J 132(4):151–160
Molland AF (2017) Ship resistance and propulsion: practical estimation of ship propulsive power. Cambridge University Press. Online ISBN: 9781316494196; https://doi.org/10.1017/9781316494196
Ngoc PV, Luu DD (2022) Calculating torsional moment of propeller in simulation of marine vessel hull-propeller by the CFD method. J Giao thong Van tai (Viet Nam) 7. ISSN: 1859-316X
Ngoc PV, Luu DD (2022) Processing thrust of numeric simulation results for marine vessel hull-propeller using STAR-CCM+ software. JMST (Vimaru, Viet Nam) 70:59–63. ISSN: 2354-0818
Siemens (2020) STAR-CCM+ user guide.
VOSCO, Technical documents of container vesel (CV.) fortuner navigator
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Vuong, N.D. et al. (2023). Modeling Thrust and Torque of the Propeller on Ship Container Fortune Navigator. In: Long, B.T., et al. Proceedings of the 3rd Annual International Conference on Material, Machines and Methods for Sustainable Development (MMMS2022). MMMS 2022. Lecture Notes in Mechanical Engineering. Springer, Cham. https://doi.org/10.1007/978-3-031-31824-5_18
Download citation
DOI: https://doi.org/10.1007/978-3-031-31824-5_18
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-31823-8
Online ISBN: 978-3-031-31824-5
eBook Packages: Chemistry and Materials ScienceChemistry and Material Science (R0)