
Abstract
The development of novel vehicle control systems that improve Fuel Economy (FE) is of significant interest, owing to the economic, environmental, and social implications of transportation. These control methods can either alter driver behavior, vehicle dynamics, or powertrain operation. This review focuses on the Eco-driving (ED) application for Autonomous Vehicles (AVs) and aims to provide a current understanding of critical research gaps, and novel detailed overview of initial studies addressing these identified research gaps. A systems-level perspective on an ED realization in AVs is used to identify research gaps, which are then studied to determine subsystem Technology Readiness Levels (TRLs), Integration Readiness Levels (IRLs) and overall System Readiness Level (SRL). Major research gaps identified include (1) the influence of real-world AV sensors on the identification of important ED parameters, (2) the effect of sparse or missing sensor data on global derivation of Autonomous Eco-driving (AED), and (3) the implications of implementing AED with a Physical Vehicle. The studies that have attempted to address each research gap are highlighted, along with suggestions for future research. After identifying research gaps, ED capabilities for AVs are asserted to be viable in current vehicles, revealing the possibility for greater transportation sustainability at present.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
- Battery electric vehicle
- Connected and automated vehicle
- Eco-driving
- Energy management system
- Autonomous vehicle
1 Introduction
Transportation’s reliance on nonrenewable hydrocarbon fuels creates serious concerns about energy supply, cost, and environmental safety. In the pursuit for green, sustainable transportation systems, consideration of vehicle energy consumption is crucial [1]. Efficient alternative energy vehicles and advanced vehicle control technologies are two areas of research that might provide solutions to the need for increasing Fuel Economy (FE) and complying with current and upcoming environmental regulations [2, 3].
The need for energy efficient vehicles has facilitated the development of new vehicle technologies such as Hybrid Electric Vehicles (HEVs) and Plug-in Hybrid Electric Vehicles (PHEVs) and Battery Electric Vehicles (BEVs) [4]. Compared to vehicles powered with only an Internal Combustion Engine (ICE), HEVs provide significantly improved fuel efficiency [4]. The reason is due to their ability to recover braking energy and the fact that an extra powertrain degree of freedom is available to more cost-effectively meet the driver-required power. PHEVs exhibits even longer range and even further reduced need for hydrocarbon fuels [5]. This is owed to their enhanced battery capacity and their ability to be charged from wall power. BEVs are projected to further improve automotive transportation sustainability with a commercially viable and a readily accessible product [6].
The other major development facilitated by the need for energy efficient vehicles is advanced vehicle control technologies which is the focus of this research. Collectively these advanced control strategies are typically referred to as energy management strategies. These technologies are also becoming more implementable thanks to developments in AVs such as advanced perception subsystems, planning subsystems, and more. As AV technology continues to evolve commercially, it is crucial to ensure synergistic development with energy efficient controls to ensure transportation sustainability as well.
Further details regarding energy efficient vehicles and energy efficient control technologies are presented in the following subsections.
1.1 The Evolution of BEVs: The Modern Era
Since 2000, BEVs have experienced a substantial amount of progress and significant commercial milestones [7]. The first Tesla Roadster shipped in 2008 and it was the first highway-legal BEV to employ a lithium-ion battery and drive more than 200 miles on a single charge [8]. The Mitsubishi i-MiEV, which went into serial production in 2009, was the first modern highway-legal BEV [9]. The first Nissan Leaf was delivered to customers in 2010. Until 2011, Mitsubishi’s i-MiEV had been the world’s most popular BEV where between 2008–2012, 2450 were sold in 30 countries [10]. In 2016, more than one million BEVs were sold throughout the world. Tesla introduced the Model 3 in 2017 and not long after, sales of BEVs surpassed the one million mark for the first time and annual worldwide market share surpassed 1%. Annual worldwide sales surpassed two million units for the first time in 2018. The Tesla Model 3 was the first BEV to sell more over 100,000 units in a single year, a milestone it achieved in 2015. BEVs accounted for one out of every two new vehicles registered in Norway in 2019. The Tesla Model 3 overtook the Nissan Leaf as the best-selling BEV in history by 2020. More than 500,000 Tesla Model 3 s have been sold worldwide since its launch in 2013. Tesla became the first automaker to build more than one million BEVs. In Norway, 10% of the vehicles on the road are BEVs. Additionally, in 2020, the worldwide sales of the Nissan Leaf achieved the milestone of 500,000 units and global BEV sales crossed the ten million unit mark for the first time. The Tesla Model 3’s worldwide sales surpassed one million units in 2021 and BEVs come in 27 distinct configurations, with 11 different manufacturers producing them. Table 1 shows the top five BEVs with the greatest ranges in 2020 model year [11]. The literature on BEVs is quite extensive, and it is constantly and fast evolving. BEVs were formerly seen to be a niche sector with an uncertain future, but that has since changed [12, 13]. The takeaway here is that BEVs are a commercially mature and desirable technology that has the potential to establish sustainable transportation [14, 15]. As we focus on a real- world implementation of energy efficient control technologies, the applicability to BEVs must be a top consideration as they are growing and are an important part of the transportation sector.
Identifying and Assessing Research Gaps for Energy Efficient Control of Electrified Autonomous Vehicle Eco-driving.
As a vehicle, a BEV is quiet, simple to drive, and free of gasoline expenditures when compared to conventional vehicles [16]. Additionally, as a form of urban transportation, it has many benefits. It does not produce any emissions along urban corridors (reducing urban air pollution due to transportation), it easily handles frequent start-stop driving, it gives full torque from a stop, and eliminates the need for gas station stops provided that charging is available at in public or at home [17]. Additionally, the utility industry is evolving, with renewable energy sources gaining traction and the “smart grid” which is the next generation of the electricity grid, is now in the process of being built. BEVs are seen as a key component of this new power system, which includes renewable energy sources and high-tech grid technologies [18, 19]. All of this has resulted in increased interest and growth in this method of transportation.
As a system, BEVs can be modeled as a combination of several subsystems. Each of these subsystems interacts with the others to make the BEV function, and a variety of technologies may be used to run them. Figure 1 depicts major subsystem components and their contribution to the overall system. Some of these components must communicate significantly with others, while others have little or no interaction. Regardless of the situation, the operation of a BEV is dependent on such interaction of all these subsystems [20]. These subsystems are important to understand and utilize to develop energy efficient control strategies.

A general systems-level viewpoint of BEV. (Adapted from Ref. [21])
1.2 Energy Management and Energy Efficient Strategies for Electrified Vehicles
Energy management strategies (EMS) in HEVs and PHEVs control the power/torque split selection between the combustion engine and the electric motor, in which the amount of power/torque provided by each power source is combined to satisfy driver demand while reducing the amount of non-renewable fuel use and increasing powertrain utilization efficiency [22, 23]. Energy efficiency strategies seek to directly decrease the energy required to drive from one point to another by either modifying the second-by-second vehicle velocity or by choosing an alternative route.
This is particularly important for BEVs since energy efficiency strategies result in a direct increase in range thus enabling higher utility [24]. Overall, it has been shown that intelligent energy management and energy-efficient use of electrified vehicles increase vehicle FE and reduce global energy consumption, greenhouse gas emissions, and air pollution emissions.
Generally there are three types of vehicle control that reduce fuel consumption for a drive cycle with a fixed starting point and a fixed ending point: (1) powertrain EMS (P-EMS), (2) Eco-Routing (ER), and (3) Eco-driving (ED) [25, 26]. P-EMS decreases fuel consumption by increasing the efficiency of the vehicle powertrain operation without modification of the drive cycle [27]. However, ED and ER decrease fuel consumption by decreasing the energy output of the vehicle through modification of the drive cycle and route [28, 29].
1.2.1 Powertrain EMS (P-EMS)
As previously mentioned, electrified vehicles will benefit greatly from the development of P-EMSs. To meet driving demands, the primary goal of a P-EMS is to distribute the power request into multiple propulsion sources (specifically for HEVs and PHEVs) [30, 31]. If we take into account battery performance (i.e. the current rate and lifespan) and tailpipe emissions levels, an efficient P-EMS can improve fuel efficiency. However, it is challenging to devise P-EMSs due to the uncertainty of future driving conditions [32,33,34,35]. Furthermore, the P-EMS should have a sufficiently simple and fast real-time controller with a desired computational speed for the implementation of a global optimization algorithm. The performance of P-EMSs strongly depends on future vehicle velocity and power request which is influenced by external factors (e.g., traffic information and surrounding vehicles) [36]. Research groups all over the world have proposed various solutions which are briefly summarized:
-
1.
Rule-based P-EMS: Here a P-EMS is implemented with either deterministic rules or with fuzzy rules.
-
(a)
Deterministic: The first application of deterministic rule-based techniques to the energy management of HEVs was in [37]. In place of the original electric assistance technique, Banvait et al. [38] described a charge depletion–charge sustaining (CD–CS) strategy. Following the cooperative control approach for the auxiliary power unit, the speed-switching power is compelled to acquire a proper curve together with the ideal brake specific fuel consumption [39, 40].
-
(b)
Fuzzy Logic: Fuzzy logic belongs to intelligent control strategies, but it dispenses with precise mathematical models of controlled systems. However, it contains self-learning capability, high flexibility, and resilience, and is thus commonly used to solve complicated nonlinear issues [41,42,43]. Denis et al. [44] developed a Sugeno-type fuzzy logic controller by using the moving average of the previous speed and the present global discharge rate as inputs in order to take use of the trip data. Li et al. has presented an adaptive-equivalent consumption reduction technique that combines a fuzzy inference system to increase self-adaptation [45].
-
(a)
-
2.
Optimization-based P-EMS: In most cases, an optimization-based P-EMS is generated by formulating an optimal control problem. An Optimization-based P-EMS delivers FE improvements by explicitly or implicitly simulating vehicle operation and managing the vehicle powertrain components to reduce fuel consumption. An optimization- based P-EMS can accomplish FE improvements for conventional cars with ICE and BEVs, but the highest FE benefits are gained from vehicles with additional powertrain operating degrees of freedom such as HEVs and PHEVs [26, 46, 47]. The actual FE improvement from an Optimization-based P-EMS is significantly dependent on the chosen driving cycle and propulsion systems [48]. One of the first optimization-based P-EMS studies, for example, showed a 28% FE increase in a HEV by optimizing gear changing and battery charging/ discharging [49].
-
(a)
Globally Optimal P-EMS: Dynamic programming (DP) [48, 50], Pontryagin’s minimum principle (PMP) [51,52,53], Stochastic Dynamic Programming (SDP) [54,55,56,57], Genetic Algorithm (GA) [58, 59], and Particle Swarm Optimization (PSO) [60, 61] are among the key optimization techniques.
-
(b)
Real-time Optimal P-EMS: Real-time optimization-based P-EMS is primarily composed of equivalent consumption-minimization strategies (ECMSs) and its variations such as adaptive ECMS [30, 62,63,64]. But predictive rules-based strategies can also be implemented in real time and DP methods can be implemented in real time through the use of a look-up table [65].
-
(c)
Prediction-based Optimal P-EMS: The goal of a Prediction-based Optimal P-EMS is to discover the best control strategy for minimizing fuel consumption within the time frame when prediction data exists [3, 35, 66,67,68,69,70].
-
(a)
1.2.2 Eco-Routing (ER)
Classical vehicle routing algorithms seek the quickest or shortest routes [71, 72], while ER algorithms seek routes with the lowest energy consumption costs. When given a starting point and a destination, ER generates a route that minimizes the amount of energy required to complete the journey. Routing is often performed on a graph where intersections represent different junctions, connected by edges roads, and costs indicate the estimated energy required to go between two junctions that the road links. The route with the lowest overall energy for the journey may then be found using minimal path routing. The complicated time-variant functions that explain the expenses are often derived by researchers. For example, Dijkstra’s routing method is a popular option among academics [73]. Users’ route preferences, such as favoring highways or avoiding toll roads, might be considered while planning a path. Furthermore, it may utilize the number of passengers as an input to determine if the car is eligible to use high-occupancy vehicle lanes. Similar to other shortest route routing applications, a green routing service needs a server to handle diverse routing requests. However, operating and managing a routing server is costly and needs precise and thorough real-world traffic and network data which is difficult to access and analyze [74,75,76,77]. It should be noted that the ER navigation system may produce up to three routes for each journey depending on multiple minimization criteria, such as distance, travel time, and energy usage. For conventional ICE vehicles, there are currently various ER algorithms capable of generating energy-optimal routes based on historical and real-time traffic data [78,79,80], but there has been minimal study on PHEVs to date [81]. As shown in [82], the performance of ER algorithms is very sensitive to the energy model used to estimate the energy cost on each network connection. The most difficult component of solving the ER algorithm for PHEVs is locating an energy model capable of calculating both the electrical energy consumption and the gasoline consumption. Jurik et al. [83] addressed the ER challenge for HEVs using longitudinal dynamics. The eco-route for PHEVs was investigated using a charge-depleting first approach in [84, 85]. To address the ER of HEVs, De Nunzio et al. [86] recently developed a semi-analytical solution to the powertrain energy management based on Pontryagin’s minimal principle. Houshmand et al. [87] conceived a combined routing and powertrain control algorithm that simultaneously identifies the energy-optimal route and the ideal energy management approach in terms of battery state of charge and fuel consumption. In [87], however, the option to recharge the battery on some portions of the trip was omitted, and either charge-sustaining or discharge-only operation was permitted.
1.2.3 Eco-Driving (ED)
ED decreases fuel consumption for all vehicle types by applying fuel-efficient driving behaviors along a predetermined route, which may affect travel duration [88]. Due to this increase in travel time, it is difficult to persuade drivers to adopt ED practices [89]. If the driving conditions along the route can be anticipated, ED may be treated as an optimum control question if the driver input is eliminated or disregarded. Current practical use of ED is realized through a set of heuristic goals, such as eliminating stops, traveling at a fuel-efficient speed (generally, this could be a higher or lower overall speed), and reducing acceleration and deceleration magnitudes, which can achieve FE improvements of approximately 10% for modern vehicles and 30% for fully AVs [90]. FE improvements realized through ED are the focus of this literature review because the energy savings is sufficiently large, and because ED can be directly implemented through AV technology.
Historically, ED implementation research has focused on the FE impact of a single intelligent vehicle technology, such as camera systems, radar systems, LiDAR, Vehicle to Vehicle (V2V), Vehicle to Infrastructure (V2I), or Vehicle to Everything (V2X). As an example of a typical ED study, researchers used projections of the traffic light Signal Phase and Timing (SPaT), a sort of V2I, to influence driving behavior and shown a FE improvement of 12–14% [91]. ED is difficult to adopt in reality since most drivers dislike giving up control [92]. Many studies of ED for AVs conclude that vehicle perception, sensor fusion, and planning must all be achieved for successful implementation. On the other hand, a comprehensive grasp of how each of these components should fit together at the system level is not as clearly defined.
1.2.4 Summary
To summarize, FE improvements realized using a fixed drive cycle are realized through a P-EMS which is a very active area of research but is most effective for HEVs and PHEVs [34, 93]. FE improvements from modifying the route is realized through ER which is highly applicable to BEVs but is a relatively mature technology. If FE is improved by modifying the drive cycle but keeping the route the same, then the technique is considered ED which is highly applicable to BEVs and has tremendous potential for further improvements once AV technology is also included [90].
1.3 Automated Cyber-Physical Vehicles
In addition to improvements in powertrain technology, embedded and cyber-physical systems have had a profound effect on the modern world [92, 94]. Embedded computer systems have been integrated with a variety of technological artifacts, such as the power grid, medical devices, automotive and transportation systems, and industrial control and production lines [95,96,97]. Modern engineering topics are often multidisciplinary and require significant interdisciplinary problem-solving capabilities. AVs are a kind of vehicular cyber-physical system that has experienced tremendous recent innovation and has garnered considerable interest from both industry and academia [98,99,100]. The strategy for establishing AVs as the primary mode of transportation on the road may have several advantages such as improvements of safety on the roads (e.g., collision avoidance); better mobility for young, elderly, and disabled; and individual improvements of energy efficiency [101]. But at the same time AV technology may increase travel demand and overall mileage due to new user groups, the reduced cost of driver’s time, and potential for mode switching (walk, low speed shuttles, transit, regional air, etc.) [102,103,104]. While the full impact of AV technology remains unknown, it is certain that AV technology will begin to experience commercial adoption in the near future [105].
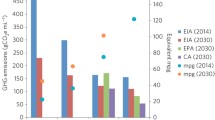
According to the projections shown in Table 2, in 2050, the reference case (all fleet vehicles will be Autonomous ICE) will have the lowest transportation energy consumption. At first glance, this may appear counter-intuitive; how could AVs with ICE consume less than BEVs? The reason for this according to Energy Information Administration (EAI) independent statistics and analysis projections data is that more people would prefer to use fleet services rather than their personal vehicles. Case 2, which assumes that all Autonomous Light-duty Vehicles (LDVs) will be BEVs. Another assumption is that AVs will enter both household and fleets, which means that more people will have access to AVs, making transportation easier for people who own vehicles. This, in turn, would have an impact on reliance on public transportation. As a result, an additional research focus is warranted to improve energy efficiency of Autonomous BEVs. In the next subsection, a derivation of the research gap for this type of technology based on its systematic readiness level is given.
Based on the uncertainty of the field there are four new contributions to the field in this article on the topic of ED in autonomous electrified vehicles (BEV and P/HEV), which builds on previous concepts and literature:
-
1.
A holistic and systems-level understanding of the subsystems and integrations needed to implement ED in AVs allowing for comparison between all studies in the field.
-
2.
Application of technology, integration, and system readiness analysis to ED realization in AVs.
-
3.
A definition of the research gaps existing between the current state of the art and realization of ED usage in AVs.
-
4.
A review of initial studies that have started to explore the identified research gaps.
2 Research Gap Derivation
One of the most important aspects of scientific advancement is the systematic identification and review of existing research gaps [106]. In order to identify research gaps, a systematic approach is applied to understand components of a general electric AV with ED implementation and the logical flow of operation. In this section, overall system architecture is introduced, and a holistic evaluation of system maturity based on the Department of Defense (DoD) approach is conducted.
2.1 AED System Architecture
A systems-level perspective of ED implementation for autonomous BEVs, represented in Fig. 2, is recommended to clarify communication between academic researchers, automotive sector manufacturers and suppliers, government officials, and other organizations.

A proposed systems-level viewpoint of ED implementation for an AV
The systems-level viewpoint is composed of four subsystems: a suite of sensors, a vehicle perception subsystem, a vehicle planning subsystem, and a vehicle plant subsystem which include a vehicle running controller. It is the goal of this systems-level perspective to remain closely aligned with the widely acknowledged systems-level perspective on autonomous BEV operation that use energy management strategies. This system receives input from a set of sensors that detect environmental information and also can be used to localize, therefore defining the vehicle’s surroundings. An AV learns about its surroundings in two phases. The first step is to look down the road ahead to see if anything has changed, such as traffic lights and signs, a pedestrian crossing, or a barrier. The second phase is concerned with the perception of surrounding traffic. Camera, LiDAR, Radar, V2V and V2I, Inertial Measurement Unit (IMU), GPS and Inertial Navigation System (INS), and map and traffic information are the most typical sensors and data that comprise the sense and perception subsystems of AVs [107]. The real-time planning subsystem employs inputs from the perception subsystem to develop and solve both the long-range (such as Global ER and Global ED) and short- term planning strategies (such as maneuver planning and trajectory planning). It is worth noting that these subsystems also depend on the driving context, and their boundaries are quite blurred [108]. The real-time control subsystem tracks the longitudinal and lateral trajectories, and interfaces with the vehicle actuators. A control architecture is interfaced to the vehicle powertrain (e.g. controlling propulsion torque, braking torque and gear shifting) and to its steering system. The real-time planning subsystem require feedback from the vehicle, its position relative to the surrounding environment, and predictions of moving obstacles [109], and finally, the powertrain operation from the running controller is actuated in the vehicle plant.
2.2 Holistic Evaluation of System Maturity
The National Aeronautics and Space Administration (NASA) developed a seven-level Technology Readiness Level (TRL) rating (shown in Table 3) in the 1980s to quantify the risk associated with technology development [110]. NASA now use this measure to assess the maturity of a specific technology and to compare the maturity of several technologies. Given its practical value, the DoD adopted a TRL model in 1999. While TRL is used similarly by NASA and the DoD, the understanding of TRL varies. For example, NASA requires TRL 6 technologies before a mission can be responsible for them [111], and the DoD requires TRL 7 technologies before they can be included in a weapons system program [112].
Further, the concept of a System Readiness Levels (SRL) was previously introduced by systems engineering researchers to address the problems applicable at the operating system level. This approach leverages the traditional TRL scale while also including the concept of Integration Readiness Levels (IRL) to produce an SRL index dynamically [112]. The definition of TRL, IRL and SRL and their corresponding levels are tabulated in Tables 3, 5 and 7 respectively.
2.2.1 Technology Readiness Levels (TRLs)
Table 4 provides a summary of the TRL for each of the subsystems shown in Fig. 2, as determined by the authors. These subsystems consist of (1) Sensors and (2) Vehicle Perception for Worldview Creation (3) vehicle planning and (4) application of a physical vehicle plant. These technologies are tabulated in the first column of Table 4. The perception subsystem takes in sensor and other pertinent inputs, defines the vehicle’s environment, and computes future vehicle operation as an output. The vehicle perception is sent into the planning subsystem, which then computes the best control. The planning subsystem is simply responsible for computing the optimum control and issuing a control request; it is not responsible for attaining the goal.
2.2.2 Integration Readiness Levels (IRLs)
Table 6 summarizes the IRL for the three alternative integration sites in Fig. 2 as viewed by the authors. Table 6’s column 1 contains descriptions of each integration scope. While the TRL is used to assess individual subsystems, the IRL assesses the readiness of each subsystem to integrate with others [112]. A more comprehensive assessment of each subsystem’s integration is required than that of the individual subsystem, which normally consists of a basic input/output architecture. If the vehicle operating controller and the vehicle plant are viewed as one high IRL subsystem, there are three theoretically distinct integration points: (1), (2), and (3) and execution. Due to the little quantity of research that employs these integration scopes, each of these integration points was determined to have a poor technical maturity.
2.2.3 System Readiness Levels (SRLs)
The SRL analysis is the more appropriate method of assessment for the overall system of AED implementation, where the TRL analysis has been performed to individual subsystems and the IRL analysis has been used to subsystem integration. Table 5 shows that, despite the relatively high TRLs of each subsystem, the low IRLs result in a low total SRL. According to the SRL study, if the IRLs are improved, the total SRL will be improved, and optimal ED for AVs will be applicable to commercial production (Table 8).
2.2.4 Research Gap Analysis Summary
The SRL analysis has clearly indicated three research gaps that are inhibiting the implementation of AED, all of which are caused by subsystem integration. These gaps show that research should focus on advancing the following integrations:
-
1.
Performance of integrated sensors and perception subsystems: The effect of Real-world AV perception on identifying the parameters associated with an ED problem.
-
2.
Planning subsystem and noisy inputs: Effect of sparse or missing sensor data on global derivation of AED.
-
3.
Planning and use of a vehicle plant: Performance of a planning subsystem integrated with a physical vehicle plant
3 Literature Review
There are a few important studies that have already begun to address these identified research gaps. While there are hundreds of articles that include ED, these integration-based research gaps must be addressed before an ED application of AVs can be commercialized. Each integration research requirement is addressed in the following subsections. Each subsection describes the scope of the research gap and critical studies that are beginning to bridge this research gap are identified and summarized. Studies that lack adequate integration to match the scope of the research gap are excluded.
3.1 Research Gap 1: Real-World AV Perception with Application to the AED Problem
The first research gap focuses on real-world AV perception using data from any real-world AV sensors to determine parameters for an ED problem; the scope is illustrated in Fig. 3. Many published ED studies exist that artificially create constraints for a mathematical optimization problem, but real world constraints derived from real world sensors are needed.

The integration scope defined in research gap 1: Real-world AV perception with application to the AED problem
Researchers from University of Utah and San Diego State University proposed an ED algorithm for CAVs to improve fuel and operational efficiency of vehicles on the freeways [113]. The proposed algorithm optimizes CAV trajectories with three main objectives - travel time minimization, fuel time minimization, and traffic safety improvement. The first stage of two-state control logic proposed, provides optimal CAV trajectories that can simultaneously minimize freeway travel time and fuel consumption with traffic sensor data and trajectory information as inputs. The second stage of the control logic is focused on ensuring operational safety of CAVs by real time adaptive actions to adjust speeds in response to local driving conditions.
To achieve improved mobility and energy efficiency in mixed traffic conditions, researchers from University of California at Riverside proposed a combination of vision-perceptive technologies and V2I communications [114]. With a neural network extracting vision and V2I information; and a deep Reinforcement Learning (RL) based policy network generates both longitudinal and lateral ED actions with a rule-based driving manager working to regulate the collaboration between rule-based policies and RL policies.
Fleming et al. [115] from Loughborough University outlined a system that uses real-time data from Global Positioning System (GPS) and automotive radar to predictably optimize a vehicle’s speed profile and train a driver toward fuel-saving and CO2-reducing behavior. Driving data was generated using STISIM Drive simulation software and validated on an instrumented vehicle equipped with radar and GPS sensor.
Table 9 summarizes the work in research gap 1. These papers are greatly advancing the commercial implementation of ED in AVs because real world sensors are being used to derive ED constraints. More research is needed in this area especially considering the possibility to utilize traditional AV sensors such as cameras, radar, and lidar.
3.2 Research Gap 2: Sparse or Missing Sensor Data on Global Derivation of AED
The second research gap focuses on the effect of sparse, missing, or incorrect sensor data which informs the ED problem’s constraints. Figure 4 shows the integration scope associated with this research gap. This gap can include the failure of sensors and infrastructure signals in providing the necessary information for AVs to perform ED as well as studies investigating how an AV can execute an ED function without all necessary information being available to it. Despite this being a common occurrence in real-world applications, there are not many ED papers that address this issue.

The integration scope defined in research gap 2: Sparse or missing sensor data on global derivation of AED
On the vehicle side, researchers in University of California Berkeley have developed a stochastic approach with DP optimization to address scenarios in which limited SPaT data is available for AED vehicles [116]. Additionally, a two-layer receding horizon control framework has been proposed to address vehicle speed in scenarios where limited SPaT data is available with the control framework putting emphasis on safety control over velocity planning [117].
SZTAKI also proposed a similar framework to prioritize drive safety over vehicle cruise velocity but with a three layer control framework as opposed to University of California’s two-layer control framework [118].
On the infrastructure side, VEDECOM proposed a Roadside Infrastructure (RSI) system that provides environmental information for incoming AV at intersections through the use of camera and lidar [119]. From VEDECOM’s research consideration needs to be given for the height positioning and environment of RSI sensors as such factors can affect the robustness of information provided by RSI.
In reviewing the sources related to research gap 2, summarized in Table 10, few sources were available in directly addressing how AVs would perform autonomous driving features in faulty sensor and external infrastructure scenarios. While there are sources outlining the benefits and disadvantage of various sensors used in AV perception, such sources lack sufficient coverage on appropriate protocols in events where limited sensor and signal data are available [120, 121]. This suggests future research into research gap could focus on development of such protocols.
3.3 Research Gap 3: Performance of a Planning Subsystem Equipped with AED Integrated with a Physical Vehicle Plant
Research outlining the work done on physical AED implementation can be broken down into four distinct sections namely:
(i) what Drive Cycle was used to test AED control algorithm, (ii) what planning model was used to enable AV to generate a solution, (iii) what type of vehicle plant is used to validate performance of control algorithm and (iv) what physical vehicle is used to evaluate control algorithm in real time. Figure 5 provides the context of the research gap scope within the AV architecture.

The integration scope defined in research gap 3: Performance of a planning subsystem equipped with AED integrated with a physical vehicle plant
Using a Rollout Algorithm (approximation of DP algorithm) with a multi-layer hierarchical Model Predictive Control (MPC) framework, researchers at Ohio State University evaluated the performance of AED through simulations and physical vehicle implementation [122]. Physical vehicle testing shows the vehicle consumed 22% less fuel compared to baseline scenario with 2.9% savings in trip time while maintaining State of Charge (SOC) at 50%. Results of physical testing were in line with findings from simulation.
University of Wisconsin-Madison developed a control system called Eco-Drive, used to optimize fuel efficiency for purely gasoline vehicles. Eco-Drive uses data available from ODB II port of gasoline vehicles to calculate an optimal vehicle speed to maximize fuel efficiency and implementation was done by automating accelerator pedal position via outputs from Eco-Drive [123]. Testing of Eco-Drive under 100 miles of driven road outline a fuel efficiency improvement of 10–40% depending on urban environments.
Leveraging NREL’s Transportation Secure Data Center (TSDC) dataset, a joint effort between General Motors LLC, Carnegie Mellon University, and NREL was carried out to develop an AED vehicle that uses InfoRich Eco-Autonomous Driving (iREAD) to generates optimal travel trajectories [124]. Evaluating iREAD’s performance in large-scale, in-depth simulations along with physical evaluations in Vehicle-In-Loop, the research found fuel savings of 10–20% depending on road conditions. Although plans were made to test iREAD in road testing, such testing was not done by the time of publication.
On a similar note, Argonne National Labs (ANL) developed a set up to automate evaluation of ED algorithm in a Vehicle-In-Loop (VIL) setting for BEV and ICE vehicles [125]. Testing has shown ANL was successfully in creating a functional and repeatable VIL system with VIL test out-ling a 22% and 16% energy savings for BEV when driven in lead and following position respectively.
For heavy/medium duty trucks, Southwest Research Institute evaluated the performance of SwRI’s ED control algorithm in class 8 trucks in accordance with J1321 test procedures [126]. Physical testing of class 8 trucks found SwRI’s control algorithm resulted in 7% decrease in fuel consumption and 6% decrease in trip time.
Applying AED in a fleet-based setting, University of California and University of Cincinnati deployed a CAV fleet to evaluate the performance of AED in real time [127, 128]. Evaluating AED performance over 7 road segments and driven over 47 miles, University of Cincinnati’s Relaxed Pontryagin’s Minimum Principle (RPMP) based AED algorithm yielded fuel savings of 3.3 to 21.2% with variation depending on hill length and slope grade. Testing their control algorithm over 8 signalized intersections of Southern California, results of University of California’s control algorithm outline a fueling savings of 30.98% for CAV fleet AED in exchange for an 8.51% increase in trip time compared to baseline.
Researchers at Colorado State University also applied predictive acceleration events control to the actual vehicle using customized 2019 Toyota Tacoma parallel-3 (P3) HEV. Their methodology combats long run time issues dynamic programming has for physical implementation by pre-computing the optimal solution for acceleration events. According to the findings of track-based testing using predictive acceleration event control in the real world 7% improvement in FE can be achieved. According to the author, this is the first time this sort of testing has ever been conducted on a real-world vehicle.
The parameters of interest are summarized in Table 11. In researching physical implementation of AED, we found that a majority of physical ED research was done on gasoline vehicles. This indicates that ED for physical BEV or Hybrids may be a potential avenue for future research.
4 Conclusions
This literature review provides an overview of automotive energy efficient control strategies and discusses that AED for BEVs should be a focus of future research efforts. A systems-level diagram of AED is proposed and an expansion of NASA’s TRL analysis (SRL analysis) is performed which identifies three existing research gaps: real-world AV perception with application to the AED problem, sparse or missing sensor data on global derivation of AED, and performance of a planning subsystem equipped with AED integrated with a physical vehicle plant. In other words, there are gaps in knowledge concerning
-
1.
An understanding of critical sensors and signals for perception and sensor fusion that enable effective FE vehicle control through AED.
-
2.
An in-depth comprehension of the sorts of fault or missing data from perception that might impact effective FE vehicle control.
-
3.
The operational and real-world problems of effective AED control implementation.
Investigation of the AED literature revealed that, despite the availability of hundreds of papers addressing the idea of ED, there are few papers that provide insights into the AED research gaps which are currently slowing commercial realization. A summary of relevant papers that are beginning to address these gaps are provided and a summary of missing knowledge is given.
The overall conclusion of this research is that focused studies addressing AED research gaps are needed before AV technology and its associated infrastructure is rolled out and fully commercialized. ED considerations need to be a part of AV RD efforts to ensure that transportation sustainability is improved at the same rate as transportation safety. There are many inconclusive studies about the effect of widespread AV adoption on transportation energy use but some of these worst case scenarios could be alleviated with ED implementation. Focused studies are needed that utilize real-world AV sensors, that investigate the effects of sensor errors, and that include real world BEV implementation.
References
Mundorf, N., Redding, C.A., Bao, S.: Sustainable transportation and health. Int. J. Environ. Res. Public Health. 15, 542 (2018)
Motallebiaraghi, F., Yao, K., Rabinowitz, A., Hoehne, C., Garikapati, V., Holden, J., Wood, E., Chen, S., Asher, Z., Bradley, T.: Mobility energy productivity evaluation of prediction-based vehicle powertrain control combined with optimal traffic management. Tech. Rep. 2022-01-0141, SAE Technical Paper (2022)
Rabinowitz, A., Araghi, F.M., Gaikwad, T., Asher, Z.D., Bradley, T.H.: Development and evaluation of velocity predictive optimal energy management strategies in intelligent and connected hybrid electric vehicles. Energies. 14, 5713 (2021)
Electric Vehicle Benefits and Considerations. https://afdc.energy.gov/fuels/electricitybenefits.html
Jung, H.: Fuel economy of plug-in hybrid electric and hybrid electric vehicles: effects of vehicle weight, hybridization ratio and ambient temperature. World Electric Vehicle Journal. 11, 31 (2020)
Bose, P., Mandal, D.K.: The future has arrived, are we ready for EV? IOP Conf. Ser.: Mater. Sci. Eng. 1080, 012004 (2021)
Muratori, M., Alexander, M., Arent, D., Bazilian, M., Cazzola, P., Dede, E.M., Farrell, J., Gearhart, C., Greene, D., Jenn, A., Keyser, M., Lipman, T., Narumanchi, S., Pesaran, A., Sioshansi, R., Suomalainen, E., Tal, G., Walkowicz, K., Ward, J.: The rise of electric vehicles – 2020 status and future expectations. Prog. Energy Combust. Sci. 3, 022002 (2021)
Ahmad, S., Khan, M., Others: Tesla: Disruptor or sustaining innovator. Journal of Case Research. 10, 1 (2019)
Linde, A.: Electric Cars – the Future Is Now! Veloce Publishing Ltd (2010)
Zhou, Y., Wang, M., Hao, H., Johnson, L., Wang, H., Hao, H.: Plug-in electric vehicle market penetration and incentives: a global review. Mitig. Adapt. Strateg. Glob. Chang. 20, 777–795 (2015)
Husain, I.: Electric and Hybrid Vehicles: Design Fundamentals, 2nd edn. CRC Press (2011)
Mahmoudzadeh Andwari, A., Pesiridis, A., Rajoo, S., Martinez-Botas, R., Esfahanian, V.: A review of battery electric vehicle technology and readiness levels. Renew. Sust. Energ. Rev. 78, 414–430 (2017)
Kadav, P., Asher, Z.D.: Improving the Range of Electric Vehicles. Int. J. Electr. Hybrid Veh (2019)
Council on Future Mobility & Electrification, “2020 report,” Tech. Rep. 1, Michigan Office of Future Mobility and Electrification, 2020
Wards Auto.: Powering up Electric Vehicles Key Part of Michigan Future Plans (2020)
Malmgren, I.: Quantifying the societal benefits of electric vehicles. World Electric Vehicle Journal. 8, 996–1007 (2016)
Boulanger, A.G., Chu, A.C., Maxx, S., Waltz, D.L.: Vehicle electrification: status and issues. Proc. IEEE. 99, 1116–1138 (2011)
Camacho, O.M.F., Norgard, P.B., Rao, N., Mihet-Popa, L.: Electrical Vehicle Batteries Testing in a Distribution Network Using Sustainable Energy, vol. 5, pp. 1033–1042 (2014)
Camacho, O.M.F., Mihet-Popa, L.: Fast charging and smart charging tests for electric vehicles batteries using renewable energy. Oil & Gas Science and Technology – Revue d’IFP Energies nouvelles. 71(1), 13 (2016)
Un-Noor, F., Padmanaban, S., Mihet-Popa, L., Mollah, M.N., Hossain, E.: A comprehensive study of key electric vehicle (EV) components, technologies, challenges, impacts, and future direction of development. Energies. 10, 1217 (2017)
Chan, C.C.: The State of the Art of Electric and Hybrid Vehicles, vol. 90, pp. 247–275 (2002)
Lin, C.-C., Peng, H., Grizzle, J.W., Kang, J.-M.: Power management strategy for a parallel hybrid electric truck. IEEE Trans. Control Syst. Technol. 11, 839–849 (2003)
Wu, G., Zhang, X., Dong, Z.: Powertrain architectures of electrified vehicles: review, classification and comparison. J. Frankl. Inst. 352, 425–448 (2015)
Rauh, N., Franke, T., Krems, J.F.: Understanding the impact of electric vehicle driving experience on range anxiety. Hum. Factors. 57, 177–187 (2015)
Z. D. Asher, V. Wifvat, A. Navarro, S. Samuelsen, and T. Bradley, “The Importance of HEV Fuel Economy and Two Research Gaps Preventing Real World Implementation of Optimal Energy Management,” 2017
Asher, Z.D., Patil, A.A., Wifvat, V.T., Frank, A.A., Samuelsen, S., Bradley, T.H.: Identification and review of the research gaps preventing a realization of optimal energy management strategies in vehicles. SAE Int. J. Alt. Power. 8 (2019)
Zeng, X., Wang, J.: A two-level stochastic approach to optimize the energy management strategy for fixed-route hybrid electric vehicles. Mechatronics. 38, 93–102 (2016)
Hibberd, D.L., Jamson, A.H., Jamson, S.L.: The design of an in-vehicle assistance system to support eco-driving. Transp. Res. Part C: Emerg. Technol. 58, 732–748 (2015)
Zhou, M., Jin, H., Wang, W.: A review of vehicle fuel consumption models to evaluate eco-driving and eco-routing. Transp. Res. Part D: Trans. Environ. 49, 203–218 (2016)
Panday, A., Bansal, H.O.: A review of optimal energy management strategies for hybrid electric vehicle. Int. J. Veh. Technol. 2014, 1–19 (2014)
Amjad, S., Neelakrishnan, S., Rudramoorthy, R.: Review of design considerations and technological challenges for successful development and deployment of plug-in hybrid electric vehicles. Renew. Sust. Energ. Rev. 14, 1104–1110 (2010)
Zhang, F., Wang, L., Coskun, S., Pang, H., Cui, Y., Xi, J.: Energy management strategies for hybrid electric vehicles: review, classification, comparison, and outlook. Energies. 13, 3352 (June 2020)
Yang, C., Zha, M., Wang, W., Liu, K., Xiang, C.: Efficient Energy Management Strategy for Hybrid Electric Vehicles/Plug-in Hybrid Electric Vehicles: Review and Recent Advances under Intelligent Transportation System. IET Intel. Transport Syst, Mar (2020)
Zhang, F., Hu, X., Langari, R., Cao, D.: Energy management strategies of connected HEVs and PHEVs: recent progress and outlook. Prog. Energy Combust. Sci. 73, 235–256 (2019)
Asher, Z.D., Baker, D.A., Bradley, T.H.: Prediction Error Applied to Hybrid Electric Vehicle Optimal Fuel Economy. IEEE Trans. Control Syst. Technol (2017)
Sulaiman, N., Hannan, M.A., Mohamed, A., Majlan, E.H., Wan Daud, W.R.: A review on energy management system for fuel cell hybrid electric vehicle: issues and challenges. Renew. Sust. Energ. Rev. 52, 802–814 (2015)
Burke, A.F., Smith, G.E.: Impacts of use-pattern on the design of electric and hybrid vehicles. In: SAE Technical Paper Series. no. 810265, (400 Commonwealth Drive, Warrendale, PA, United States), SAE International (1981)
Banvait, H., Anwar, S., Chen, Y.: A rule-based energy management strategy for plug-in hybrid electric vehicle (PHEV). 2009 American Control Conference, 3938–3943 (2009)
Shen, Y., Ge, G., Liu, A., Zheng, Z.: Operation of an ICE/PM/TTRB APU in a range extender electric vehicle Power-Train, pp. 3205–3210. 2019 IEEE Innovative Smart Grid Technologies – Asia (ISGT Asia) (2019)
Frank, A.A., Francisco, A.: Ideal Operating Line CVT Shifting Strategy for Hybrid Electric Vehicles. tech. rep (2002)
Li, Q., Chen, W., Li, Y., Liu, S., Huang, J.: Energy management strategy for fuel cell/battery/ultracapacitor hybrid vehicle based on fuzzy logic. Int. J. Electr. Power Energy Syst. 43, 514–525 (2012)
Jun, L., Faming, Z., Xiong, T., Biao, L., Wenbin, W.: Simulation research on PHEV based on fuzzy logic control strategies. Journal of Chongqing Jiao Tong University (Natural Science). 32(2), 329–333 (2013)
Mohd Sabri, M.F., Danapalasingam, K.A., Rahmat, M.F.: Improved fuel economy of through-the-road hybrid electric vehicle with fuzzy logic-based energy management strategy. Int. J. Fuzzy Syst. 20, 2677–2692 (2018)
Denis, N., Dubois, M.R., Desrochers, A.: Fuzzy-based blended control for the energy management of a parallel plug-in hybrid electric vehicle. IET Intell. Transp. Syst. 9, 30–37 (2015)
Li, P., Li, Y., Wang, Y., Jiao, X.: An intelligent logic Rule-Based energy management strategy for Power-Split plug-in hybrid electric vehicle, pp. 7668–7672. 2018 37th Chinese Control Conference (CCC) (2018)
Meyer, R.T.: Distributed switched optimal control of an electric vehicle. Energies. 13, 3364 (2020)
Abotabik, M., Meyer, R.T.: Switched Optimal Control of a Heavy-Duty Hybrid Vehicle, vol. 14. Energies (2021)
Liu, J., Chen, Y., Li, W., Shang, F., Zhan, J.: Hybrid-trip-model-based energy management of a PHEV with computation-optimized dynamic programming. IEEE Trans. Veh. Technol. 67, 338–353 (2018)
C.-C. Lin, J.-M. Kang, J. W. Grizzle, and H. Peng, “Energy Management Strategy for a Parallel Hybrid Electric Truck,” 2001
Bellman, R.: Dynamic programming. Science. 153, 34–37 (1966)
Rousseau, G., Sinoquet, D., Rouchon, P.: Constrained optimization of energy management for a mild-hybrid vehicle. Oil & Gas Science and Technology – Revue de l’IFP. 62(4), 623–634 (2007)
Wei, X., Guzzella, L., Utkin, V.I., Rizzoni, G.: Model-Based Fuel Optimal Control of Hybrid Electric Vehicle Using Variable Structure Control Systems, vol. 129, pp. 13–19 (2007)
Serrao, L., Rizzoni, G.: Optimal control of power split for a hybrid electric refuse vehicle, pp. 4498–4503. 2008 American Control Conference (2008)
Du, Y., Zhao, Y., Wang, Q., Zhang, Y., Xia, H.: Trip-oriented stochastic optimal energy management strategy for plug-in hybrid electric bus. Energy. 115, 1259–1271 (2016)
Liu, B., Li, L., Wang, X., Cheng, S.: Hybrid electric vehicle downshifting strategy based on stochastic dynamic programming during regenerative braking process. IEEE Trans. Veh. Technol. 67, 4716–4727 (2018)
Moura, S.J., Fathy, H.K., Callaway, D.S., Stein, J.L.: A Stochastic Optimal Control Approach for Power Management in Plug-in Hybrid Electric Vehicles, vol. 19, pp. 545–555 (2011)
T. Leroy, J. Malaize, and G. Corde, Towards real-time optimal energy management of HEV powertrains using stochastic dynamic programming, in 2012 IEEE Vehicle Power and Propulsion Conference, pp. 383–388, ieeexplore.ieee.org, 2012
Lu, X., Wu, Y., Lian, J., Zhang, Y., Chen, C., Wang, P., Meng, L.: Energy management of hybrid electric vehicles: A review of energy optimization of fuel cell hybrid power system based on genetic algorithm. Energy Convers. Manage. 205, 112474 (2020)
Wieczorek, M., Lewandowski, M.: A mathematical representation of an energy management strategy for hybrid energy storage system in electric vehicle and real time optimization using a genetic algorithm. Appl. Energy. 192, 222–233 (2017)
Chen, Z., Xiong, R., Wang, K., Jiao, B.: Optimal energy management strategy of a plug-in hybrid electric vehicle based on a particle swarm optimization algorithm. Energies. 8, 3661–3678 (2015)
Chen, Z., Xiong, R., Cao, J.: Particle swarm optimization-based optimal power management of plug-in hybrid electric vehicles considering uncertain driving conditions. Energy. 96, 197–208 (2016)
Rezaei, A., Burl, J.B., Zhou, B.: Estimation of the ECMS Equivalent Factor Bounds for Hybrid Electric Vehicles. IEEE Trans. Control Syst. Technol (2017)
Zhang, Y., Chu, L., Fu, Z., Guo, C., Zhao, D., Li, Y., Ou, Y., Xu, L.: An improved adaptive equivalent consumption minimization strategy for parallel plug-in hybrid electric vehicle. Proc. Inst. Mech. Eng. Pt. D: J. Automobile Eng. 233, 1649–1663 (2019)
Chen, Z., Liu, Y., Ye, M., Zhang, Y., Chen, Z., Li, G.: A survey on key techniques and development perspectives of equivalent consumption minimisation strategy for hybrid electric vehicles. Renew. Sust. Energ. Rev. 151, 111607 (2021)
Asher, Z.D., Trinko, D.A., Payne, J.D., Geller, B.M., Bradley, T.H.: Real-Time implementation of optimal energy management in hybrid electric vehicles: Globally optimal control of acceleration events. J. Dyn. Syst. Meas. Control. 142 (2020)
Xie, S., Hu, X., Qi, S., Tang, X., Lang, K., Xin, Z., Brighton, J.: Model predictive energy management for plug-in hybrid electric vehicles considering optimal battery depth of discharge. Energy. 173, 667–678 (2019)
T. Gaikwad, A. Rabinowitz, F. Motallebiaraghi, T. Bradley, and others, Vehicle Velocity Prediction Using Artificial Neural Network and Effect of Real World Signals on Prediction Window, 2020
Patil, A.A.: Comparison of Optimal Energy Management Strategies Using Dynamic Programming, Model Predictive Control, and Constant Velocity Prediction. PhD thesis, Western Michigan University (2020)
Meyer, R.T., DeCarlo, R.A., Pekarek, S.: Hybrid model predictive power management of a battery-supercapacitor electric vehicle. Asian J. Control. 18, 150–165 (2016)
Meyer, R.T., Johnson, S.C., DeCarlo, R.A., Pekarek, S., Sudhoff, S.D.: Hybrid electric vehicle fault tolerant control. J. Dyn. Syst. Meas. Control. 140 (2017)
Bertsekas, D.P.: Dynamic Programming and Optimal Control. Athena Scientific (1995)
Braekers, K., Ramaekers, K., Van Nieuwenhuyse, I.: The vehicle routing problem: state of the art classification and review. Comput. Ind. Eng. 99, 300–313 (2016)
Dijkstra, E.W.: A note on two problems in connexion with graphs. Numer. Math. 1, 269–271 (1959)
Ericsson, E., Larsson, H., Brundell-Freij, K.: Optimizing route choice for lowest fuel consumption–potential effects of a new driver support tool. Transp. Res. Part C: Emerg. Technol. 14(6), 369–383 (2006)
Boriboonsomsin, K., Barth, M.J., Zhu, W., Vu, A.: Eco-routing navigation system based on multisource historical and real-time traffic information. IEEE Trans. Intell. Transp. Syst. 13, 1694–1704 (2012)
Zhu, L., Chiu, Y.-C.: Transportation routing map abstraction approach: algorithm and numerical analysis. Transp. Res. Rec. 2528, 78–85 (2015)
Zhu, L.: Routing Map Topology Analysis and Application. PhD thesis (2014)
Barth, M., Boriboonsomsin, K., Vu, A.: Environmentally-Friendly Navigation, pp. 684–689. 2007 IEEE Intelligent Transportation Systems Conference (2007)
Andersen, O., Jensen, C.S., Torp, K., Yang, B.: EcoTour: Reducing the environmental footprint of vehicles using eco-routes, vol. 1, pp. 338–340. 2013 IEEE 14th International Conference on Mobile Data Management (2013)
Yang, B., Guo, C., Jensen, C.S., Kaul, M., Shang, S.: Stochastic skyline route planning under time-varying uncertainty, pp. 136–147. 2014 IEEE 30th International Conference on Data Engineering (2014)
Guanetti, J., Kim, Y., Borrelli, F.: Control of connected and automated vehicles: state of the art and future challenges. Annu. Rev. Control. 45, 18–40 (2018)
M. Kubicka, J. Klusacek, A. Sciarretta, A. Cela, H. Mounier, L. Thibault, and S. I. Niculescu, “Performance of Current Eco-Routing Methods,” 2016
Jurik, T., Cela, A., Hamouche, R., Natowicz, R., Reama, A., Niculescu, S.-I., Julien, J.: Energy Optimal Real-Time Navigation System, vol. 6, pp. 66–79 (2014)
Sun, Z., Zhou, X.: To save money or to save time: intelligent routing design for plug-in hybrid electric vehicle. Transp. Res. Part D: Trans. Environ. 43, 238–250 (2016)
Z. Qiao and O. Karabasoglu, “Vehicle Powertrain Connected Route Optimization for Conventional, Hybrid and Plug-in Electric Vehicles,” 2016
De Nunzio, G., Sciarretta, A., Ben Gharbia, I., Ojeda, L.L.: A constrained Eco-Routing strategy for hybrid electric vehicles based on Semi-Analytical energy management, pp. 355–361. 2018 21st International Conference on Intelligent Transportation Systems (ITSC) (2018)
Houshmand, A., Cassandras, C.G.: Eco-Routing of Plug-In Hybrid Electric Vehicles in Transportation Networks, pp. 1508–1513. 2018 21st International Conference on Intelligent Transportation Systems (ITSC) (2018)
Mahmoud, Y.H., Brown, N.E., Motallebiaraghi, F., Koelling, M., Meyer, R., Asher, Z.D., Dontchev, A., Kolmanovsky, I.: Autonomous eco-driving with traffic light and lead vehicle constraints: an application of best constrained interpolation. IFAC-PapersOnLine. 54(10), 45–50 (2021)
Asher, Z.D., Trinko, D.A., Bradley, T.H.: Increasing the fuel economy of connected and autonomous lithium-ion electrified vehicles. In: Pistoia, G., Liaw, B. (eds.) Behaviour of Lithium-Ion Batteries in Electric Vehicles: Battery Health, Performance, Safety, and Cost, pp. 129–151. Springer International Publishing, Cham (2018)
Michel, P., Karbowski, D., Rousseau, A.: Impact of Connectivity and Automation on Vehicle Energy Use. tech. rep., SAE Technical Paper (2016)
Mandava, S., Boriboonsomsin, K., Barth, M.: Arterial Velocity Planning Based on Traffic Signal Information Under Light Traffic Conditions, pp. 1–6., ieeexplore.ieee.org. 2009 12th International IEEE Conference on Intelligent Transportation Systems (2009)
Potvin-Bernal, J., Hansma, B., Donmez, B., Lockwood, P., Shu, L.H.: Influencing greater adoption of Eco-Driving practices using an associative graphical display. J. Mech. Des. 142 (2020)
Zhang, P., Yan, F., Du, C.: A comprehensive analysis of energy management strategies for hybrid electric vehicles based on bibliometrics. Renew. Sust. Energ. Rev. 48, 88–104 (2015)
Davis, K.R., Davis, C.M., Zonouz, S.A., Bobba, R.B., Berthier, R., Garcia, L., Sauer, P.W.: A cyber-physical modeling and assessment framework for power grid infrastructures. IEEE Trans. Smart Grid. 6, 2464–2475 (2015)
Rajkumar, R., Lee, I., Sha, L., Stankovic, J.: Cyber-physical systems: The next computing revolution, pp. 731–736., ieeexplore.ieee.org. Design Automation Conference (2010)
Giraldo, J., Sarkar, E., Cardenas, A.A., Maniatakos, M., Kantarcioglu, M.: Security and privacy in cyber-physical systems: a survey of surveys. IEEE Design Test. 34, 7–17 (2017)
Ebert, C., Jones, C.: Embedded software: facts, figures, and future. Computer. 42, 42–52 (2009)
Chattopadhyay, A., Lam, K.-Y.: Security of Autonomous Vehicle as a Cyber-Physical System, pp. 1–6., ieeexplore.ieee.org. 2017 7th International Symposium on Embedded Computing and System Design (ISED) (2017)
Chen, B., Yang, Z., Huang, S., Du, X., Cui, Z., Bhimani, J., Xie, X., Mi, N.: Cyber-Physical System Enabled Nearby Traffic Flow Modelling for Autonomous Vehicles, pp. 1–6., ieeexplore.ieee.org. 2017 IEEE 36th International Performance Computing and Communications Conference (IPCCC) (2017)
Abid, H., Phuong, L.T.T., Wang, J., Lee, S., Qaisar, S.: V-Cloud: vehicular cyber-physical systems and cloud computing. In: Proceedings of the 4th International Symposium on Applied Sciences in Biomedical and Communication Technologies no. Article 165 in ISABEL ‘11, pp. 1–5. Association for Computing Machinery, New York, NY, USA (2011)
Harper, C.D., Hendrickson, C.T., Mangones, S., Samaras, C.: Estimating potential increases in travel with autonomous vehicles for the non-driving, elderly and people with travel-restrictive medical conditions. Transp. Res. Part C: Emerg. Technol. 72, 1–9 (2016)
Chase, N., Maples, J., Schipper, M.: Autonomous vehicles: Uncertainties and energy implications. In: 2018 EIA Energy Conference, vol. 5, p. 2018. PowerPoint, Washington, DC
Mohan, A., Sripad, S., Vaishnav, P., Viswanathan, V.: Trade-Offs between Automation and Light Vehicle Electrification, vol. 5, pp. 543–549. Nature Energy (2020)
Goberville, N., Zoardar, M.M., Rojas, J., Brown, N., Motallebiaraghi, F., Navarro, A., Asher, Z.: Techno-economic analysis of fixed-route autonomous and electric shuttles. SAE Technical Paper, 01–0061 (2021)
Goberville, N.A., Kadav, P., Asher, Z.D.: Tire Track Identification: A Method for Drivable Region Detection in Conditions of Snow-Occluded Lane Lines. tech. rep., SAE Technical Paper (2022)
Robinson, K.A., Saldanha, I.J., Mckoy, N.A.: Development of a Framework to Identify Research Gaps from Systematic Reviews, vol. 64, pp. 1325–1330 (2011)
Rosique, F., Navarro, P.J., Ferna’ndez, C., Padilla, A.: A systematic review of perception system and simulators for autonomous vehicles research. Sensors. 19 (2019)
Paden, B., a’p, M.C., Yong, S.Z., Yershov, D., Frazzoli, E.: A survey of motion planning and control techniques for Self-Driving urban vehicles. IEEE Transactions on Intelligent Vehicles. 1, 33–55 (2016)
Li, X., Sun, Z., Cao, D., He, Z., Zhu, Q.: Real-time trajectory planning for autonomous urban driving: framework, algorithms, and verifications. IEEE/ASME Trans. Mechatron. 21, 740–753 (2016)
Mankins, J.C.: Technology readiness assessments: a retrospective. Acta Astronaut. 65, 1216–1223 (2009)
Shishko, R.: Optimizing technology investments: A broad mission model approach. In: AIAA Space 2003 Conference & Exposition. AIAA SPACE Forum, American Institute of Aeronautics and Astronautics (2003)
Sauser, B., Verma, D., Ramirez-Marquez, J., Gove, R.: From TRL to SRL: The Concept of Systems Readiness Levels, pp. 1–10. Conference on Systems Engineering Research, Los Angeles (2006)
Yang, X.T., Huang, K., Zhang, Z., Zhang, Z.A., Lin, F.: Eco-driving system for connected automated vehicles: multi-objective trajectory optimization. IEEE Trans. Intell. Transp. Syst. 22, 7837–7849 (2021)
Bai, Z., Hao, P., Shangguan, W., Cai, B., Barth, M.J.: Hybrid Reinforcement Learning-Based Eco-Driving Strategy for Connected and Automated Vehicles at Signalized Intersections, vol. 23, pp. 15850–15863 (2022)
Fleming, J., Yan, X., Allison, C., Stanton, N., others: Real-Time Predictive Eco-Driving Assistance Considering Road Geometry and Long-Range Radar Measurements, vol. 15, pp. 573–583. IET Intel. Transport Syst (2021)
Sun, C., Guanetti, J., Borrelli, F., Moura, S.J.: Optimal eco-driving control of connected and autonomous vehicles through signalized intersections. IEEE Internet Things J. 7(5), 3759–3773 (2020)
Bae, S., Choi, Y., Kim, Y., Guanetti, J., Borrelli, F., Moura, S.J.: Real-time ecological velocity planning for plug-in hybrid vehicles with partial communication to traffic lights. CoRR. abs/1903.08784 (2019)
Nemeth, B., Miha’ly, A., Ga’spa’r, P.: Design of Fault-Tolerant Cruise Control in a Hierarchical Framework for Connected Automated Vehicles, pp. 1–6. 5th International Conference on Control and Fault-Tolerant Systems, 2021
Jandial, A., Merdrignac, P., Shagdar, O., Fevrier, L.: Implementation and evaluation of intelligent roadside infrastructure for automated vehicle with i2v communication. In: Laouiti, A., Qayyum, A., Saad, M.N.M. (eds.) Vehicular Ad-hoc Networks for Smart Cities, pp. 3–18. Springer, Singapore (2020)
Vargas, J., Alsweiss, S., Toker, O., Razdan, R., Santos, J.: An overview of autonomous vehicles sensors and their vulnerability to weather conditions. Sensors. 21 (2021)
Yurtsever, E., Lambert, J., Carballo, A., Takeda, K.: A survey of autonomous driving: Common practices and emerging technologies. CoRR. abs/1906.05113 (2019)
Deshpande, S.R., Gupta, S., Gupta, A., Canova, M.: Real-Time Ecodriving Control in Electrified Connected and Autonomous Vehicles Using Approximate Dynamic Programing. Journal of Dynamic Systems, Measurement, and Control. 144, 011111 (2022)
Kang, L., Qi, B., Janecek, D., Banerjee, S.: Ecodrive: A mobile sensing and control system for fuel efficient driving. In: Proceedings of the 21st Annual International Conference on Mobile Computing and Networking, MobiCom ‘15, pp. 358–371. Association for Computing Machinery, New York, NY, USA (2015)
R. Rajkumar, J. Zhao, C. F. Chang, and J. Gonder, Corroborative evaluation of the real-world energy saving potentials of inforich eco-autonomous driving (iread) system
Jeong, J., Karbowski, D., Kim, N., Han, J., Stutenberg, K., Di Russo, M., Grave, J.: Vehicle-in-the-loop workflow for the evaluation of energy-efficient automated driving controls in real vehicles. Tech. Rep (2022)
Bhagdikar, P., Gankov, S., Frazier, C., Rengarajan, S. et al., Demonstration of Energy Consumption Reduction in Class 8 Trucks Using Eco-Driving Algorithm Based on On-Road Testing, SAE Technical Paper 2022-01-0139, 2022, https://doi.org/10.4271/2022-01-0139
Ma, J., Hu, J., Leslie, E., Zhou, F., Huang, P., Bared, J.: An eco-drive experiment on rolling terrains for fuel consumption optimization with connected automated vehicles. Transportation Research Part C: Emerging Technologies. 100, 125–141 (2019)
Bae, S., Kim, Y., Choi, Y., Guanetti, J., Gill, P., Borrelli, F., Moura, S.J.: Ecological adaptive cruise control of plug-in hybrid electric vehicle with connected infrastructure and on-road experiments. Journal of Dynamic Systems, Measurement, and Control. 144, 011109 (2022)
Wang, Z., Hsu, Y.-P., Vu, A., Caballero, F., Hao, P., Wu, G., Boriboonsomsin, K., Barth, M.J., Kailas, A., Amar, P., Garmon, E., Tanugula, S.: Early findings from field trials of Heavy-Duty truck connected Eco-Driving system, pp. 3037–3042. 2019 IEEE Intelligent Transportation Systems Conference (ITSC) (2019)
Amini, M.R., Hu, Q., Wang, H., Feng, Y., Kolmanovsky, I., Sun, J.: Experimental Validation of Eco-Driving and Eco-Heating Strategies for Connected and Automated HEVs. SAE International, Warrendale (2021)
Yang, Z., Feng, Y., Gong, X., Zhao, D., Sun, J.: Eco-trajectory planning with consideration of queue along congested corridor for hybrid electric vehicles. Transp. Res. Rec. 2673, 277–286 (2019)
White, S.: Physical Validation of Predictive Acceleration Control on A parallel Hybrid Electric Vehicle. PhD Thesis
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this chapter

Cite this chapter
Araghi, F.M. et al. (2023). Identifying and Assessing Research Gaps for Energy Efficient Control of Electrified Autonomous Vehicle Eco-Driving. In: Kukkala, V.K., Pasricha, S. (eds) Machine Learning and Optimization Techniques for Automotive Cyber-Physical Systems. Springer, Cham. https://doi.org/10.1007/978-3-031-28016-0_27
Download citation
DOI: https://doi.org/10.1007/978-3-031-28016-0_27
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-28015-3
Online ISBN: 978-3-031-28016-0
eBook Packages: EngineeringEngineering (R0)