
Abstract
Hybrid electric vehicle (HEV) provides drivers with uncompromised drivability while significantly reducing hazardous emissions. This is achieved through optimal power flow solution via energy management strategy (EMS) which efficiently handles energy distribution from the different energy sources of a HEV. In this paper, a through-the-road (TtR) HEV configuration with fuzzy logic-based EMS is proposed. Fuzzy logic is applied in the main control block of the vehicle with a pair of membership functions assisting the power flow controller to select the appropriate power distribution by the hybrid drivetrain based on available resources in real time. The EMS operates in hybrid mode blended control strategy to achieve minimum fuel consumption for the desired trip by prioritising the electrical drivetrain over the internal combustion engine (ICE) for power distribution to the wheels. A Simulink model was constructed in MATLAB® to represent the TtR HEV equipped with in-wheel motors (IWM) in the rear wheels. A fuzzy logic-based EMS controller has been synthesised. The power flow in the TtR HEV is decided based on current vehicle speed and the global discharge rate (GDR) value derived from the current state-of-charge (SOC) of the battery and remaining trip distance. The proposed controller performs well on standard drive cycles and offers up to 62% improvement in fuel consumption compared to the reference model which uses rule-based EMS. Comparisons against other published models are equally encouraging, especially on high average speed drive cycles with up to 19.8% improvements in fuel consumption.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The transportation sector is facing a challenge in the form of strict emission standards which needs to be complied with by all new vehicles [1,2,3]. As fuel prices are expected to rise and stringent emission policies are in place, car manufacturers and researchers are finding ways to push the industry forward while confronting these challenges in the best way possible. While the paradigm shift towards emission-free vehicles is slowly but steadily gaining momentum in many developed markets led by battery-powered electric vehicles (EV), it is still in infancy stage in majority of other countries. The main deterrence in expanding the EV markets beyond developed countries lies in the high EV prices and more vitally, the lack of publicly accessible charging facilities beyond urban areas which renders long-distance travels on EV unfeasible [4,5,6,7,8]. This is where HEV with the combination of conventional and electrical drivetrain currently serves as the intermediary solution to fuel consumption and emission concern [4,5,6,7,8]. HEVs offer significant reduction in fuel consumption compared to conventional vehicles by having electric motors to help driving the wheels [9,10,11,12]. HEV not only has better consumer perception compared to EV in general [4, 6], most major car manufacturers are seeing the move towards HEV production as the most sensible capital investment for the time being due to the minimal cost required to incorporate it into existing production line.
For any chosen HEV architecture, the EMS is responsible to manage the dual energy sources and the power flow within the vehicle [9, 10]. There are several publications on various methods of EMS proposed by researchers [13,14,15,16,17,18,19,20,21,22] and review papers which compiled and summarised previous contributions in EMS designs [5, 23,24,25,26,27]. The main take from the literature review is that EMS for HEV is a diverse subject regarding a plethora of varying factors such as the selection of drivetrain architecture and configurations, the degree of hybridisation and down to component selections and sizing [5, 9,10,11,12]. This ensures continuous development in EMS for years to come.
In this paper, a TtR HEV configuration fitted with IWM at the rear axle as illustrated in Fig. 1 [5] is considered. The TtR HEV is coupled with a fuzzy logic-based EMS at the centre of its power flow management.

Through-the-road HEV configuration with in-wheel motors fitted in rear wheels
TtR concept has been around for many years. However, as discussed previously in [5, 28,29,30,31,32,33,34,35], TtR architecture has not been the focus for many manufacturers due to its limitations which render it inferior compared to standard HEVs [5, 29]. Even though there are currently many proposals and publications on EMS for other types of HEV, publication focusing on TtR architecture is still uncommon. On the bright side, TtR architecture offers the lowest design complexity and due to the nature that both of its powertrains are separated, it allows for a simple after-market retrofitting of conventional vehicles and turns them into HEVs [5, 33, 36]. However, TtR HEV requires more optimisation and innovations before it can compete with the other HEV configurations in terms of performance. Previous publications focused on drivability aspect of the architecture due to the discrete powertrains which may cause unbalanced power distribution to the wheels [29, 31, 33, 37] and several other publications have also tackled the EMS side of the TtR HEV, including fuzzy logic, with varying level of outcomes [29, 33, 34, 38]. This paper provides the method of using a fuzzy logic-based EMS which focuses on minimising fuel consumption by prioritising charge depleting (CD) mode in a blended control strategy.
Fuzzy control is one of the more popular approach taken by researchers in engaging the EMS problem in HEV. Due to the complexity of HEV systems, conventional EMS design approach that relies heavily on exact mathematical models and fixated rules such as rule-based EMS almost always yield non-optimal solutions [10]. This impreciseness affects the overall efficiency of the vehicle. Fuzzy logic control theory consists of fuzzy set theory and fuzzy logic where the former is an extension of TRUE and FALSE (1 and 0) set theory and the latter is an extension of conventional logic in how the system determines the output [10]. Fuzzy sets have elements with degrees of membership between 0 and 1 mapping two or more interrelated sets of parameters [10]. In other words, the available sets of data are mapped to each other by a membership function which allows for a wider array of options unattainable using deterministic rule-based solutions. The detailed values of membership function can be determined using fuzzy relation or fuzzy reasoning [10]. Fuzzy relation relies heavily on similarity or the degree of resemblance between the sets of data, whereas fuzzy reasoning is expressed in IF–THEN format which has spurred popular reasoning methods such as Mamdani method [39] and Takagi–Sugeno method [40].
A number of publications on fuzzy logic-based EMS have surfaced throughout the years [41,42,43,44,45,46,47]. For example, intelligent management of ICE power and speed for series–parallel HEV using fuzzy gain scheduling to increase PI controller performance [41], fuzzy multi-objective optimisation that yields pareto optimal solutions in terms of the balance between consumed electrical energy and fuel by first transfiguring the required electrical energy into corresponding fuel consumption taken as the control objectives [42], fuzzy logic-based blended control strategy that optimises electric motor (EM) power delivery to the wheel while prioritising CD mode operation [43] and introduction of battery working state (BWS) to increase battery state-of-charge (SOC) estimation for better ESS preservation while ensuring acceptable fuel consumption [47] among others. From the literature, the author has selected fuzzy logic as the method of choice for the TtR HEV as it often offers the perfect balance of complexity and performance.
However, as mentioned above, the availability of proposal focusing specifically on TtR architecture is limited. As EMS are always formulated to take full advantage of a specific architecture, previously proposed methods may or may not be suitable for the TtR architecture used in this paper [5]. That is why it is necessary for a renewed observation for the EMS performance, especially in this case where a modified simulation platform is used. With proper optimisations, TtR HEV which has lower complexity and is cheaper to produce shall be able to have comparable level of efficiency with other HEV configurations. Furthermore, there are recent proposals in the fuzzy logic applications which are worth considering as they attempt on optimisations on individual aspects in a HEV which will be mentioned as the paper progresses. Each method promises improvements in their respective ways, and they are considered as prospects to the current project.
The main objectives for this research are as follows. First is to propose a simulation platform for HEV development using Simulink. Using the tools available in MATLAB, a modified TtR HEV model was constructed using Simulink to take advantage of the robustness of MATLAB which has allowed seamless development which is vital to the progress of the research. The second objective is to synthesise a fuzzy logic-based energy management controller befitting the chosen TtR architecture. As proven by the limited availability of publications focusing on TtR HEV, the author feels that there is a gap that needs to be addressed to bring forth the advantages and potential of TtR HEV compared to the other HEV architectures; thus, this particular architecture was selected. The third objective is to observe the performance of the energy management controller for the TtR HEV in simulation. By performing simulations using the simulated model, the validity of the model can be assessed by comparing its performance against the reference model of a series–parallel HEV using rule-based EMS on standard drive cycles. The fuel consumption pattern of the proposed fuzzy logic-based EMS is also compared to the reference model and against other publications.
This paper is organised as follows. Part 1 is the introduction explaining the brief background of this research and what the author is trying to achieve. Part 2 emphasises on the characteristics of TtR HEV and the reasoning for the selection of the architecture and EMS. The modelling of the simulation platform in Simulink will be discussed in Part 3. Part 4 is the simulation results and discussions on the outcome. Here, comparisons of performance between different architectures and EMS over several standard drive cycles are highlighted. Part 5 concludes the paper and briefly explains the way forward for this research based on the results.
2 TtR HEV Architecture and EMS Considerations
2.1 Architectural Advantages and Disadvantages
TtR HEV is a parallel HEV but with no mechanical torque coupling device between the mechanical path and electrical path of the powertrain [5, 9, 31, 36, 48]. To make up for the absence of in-transmission torque coupling mechanism, the link between the two powertrains is established externally through the road contact while in motion, hence the name “through-the-road” [5, 9, 31, 36, 48]. This exclusion of complex torque coupling device grants a simpler and cheaper foundation for HEV implementation compared to any other configurations [5, 9, 34, 35]. Advantages and disadvantages of TtR architecture have been discussed thoroughly here [5, 29] along with the necessary measures which can be considered in the effort to eradicate its shortcomings while still maintaining its pragmatic benefits.
The design of choice for TtR HEV in this research is a plug-in HEV (PHEV) to maximise the EMS potential by using the external charging feature to provide the best possible window for optimal EMS operation [5, 30]. This design choice will consequently eradicate the limited on-board ESS recharging capability of TtR HEV [5]. Subsequently, the use of deep discharge, high energy density battery as the secondary ESS is also being considered to further enhance the EMS potential. The focus of this paper is to synthesise an energy management controller capable of performing favourably in a heavily modified HEV architecture given the best possible conditions. From there onwards, the controller will be scaled down towards a more realistic target using the robustness of MATLAB® as a powerful simulation tool.
2.2 Energy Management Strategy and Performance
From the literature, EMS is generally divided into offline and online types with the defining distinction between them lies in their level of complexity [5]. Offline EMS almost always uses complex calculations via various methods such as quadratic or dynamic programming [49,50,51,52,53,54,55] by taking into account the future information of known drive cycles. The advantage of having this information beforehand is the ability to produce highly optimal power flow solutions [5] through manipulation of available parameters for minimisation of the cost function or the control objective. However, due to their heavy computational demand, real-time application is unfeasible but these optimal or near-optimal solutions represent the theoretically obtainable solution for the targeted HEV which leads to their uses in benchmarking exercise of vehicle performance in real-life applications [5]. Contrariwise, online EMS prioritises practicality over complexity which allows them to operate in real time with lower computational needs [5]. Online EMS ranges from the simplest form of deterministic rule-based EMS [5, 23, 56, 57] to a more complex adaptive EMS [15, 58, 59] or predictive EMS [51, 60, 61] which vary greatly in their level of complexity and efficiency [5]. The simpler ones tend to have very light computational elements and often rely on a fixed set of rules for the powertrain to follow which results in a low cost and easy to implement EMS which offers only marginal improvement in fuel consumption over conventional vehicles due to lack of optimisation [5]. The more complex online EMS requires some future information to an extent to help the EMS controller to produce more optimal solutions by giving them the ability to adapt to the changeable driving conditions just enough to allow for real-time semi-optimal power flow calculations which greatly improve HEV efficiency [5, 62, 63], and one of those methods include fuzzy logic approach applied in this paper.
As explained previously, optimal solution for any given drive cycle is obtainable through various methods if the complete information of the trip is known a priori [5, 25, 26, 62,63,64]. The major problem for optimal power flow formulation is the unavailability of information that are only measurable in the future, such as trip distance, vehicle speed, driving behaviour, road and traffic conditions, weather. [5]. Although current technology level has allowed for very detailed terrain previews and real-time traffic information updates, other attributes such as driver’s actions and changes in weather conditions that affect vehicle operations are always unpredictable [5, 65]. This uncertainties appeal for an EMS that is less reliant or completely independent of future information [5]. Although this decision often leads to less than optimal power flow solutions, it boasts simplicity in design and is real-time-capable.
In order to identify the challenges and the most suitable EMS for the proposed TtR HEV, first, it is important to take into consideration every possible operating mode of a HEV. Taking the power flow as the foundation of EMS design, generally there are nine operating modes possible for HEV of any type [64];
-
(i)
ICE alone delivers power to the load.
-
(ii)
EM alone delivers power to the load.
-
(iii)
Both ICE and EM deliver power to the load.
-
(iv)
ESS regains power from the load.
-
(v)
ESS obtains power from ICE.
-
(vi)
ESS obtains power from ICE and the load.
-
(vii)
ICE delivers power to the load and to ESS.
-
(viii)
ICE delivers its power to EM, and EM delivers its power to the load.
-
(ix)
ICE delivers its power to the load, and the load delivers the power to ESS.
However, only five out of the nine operating modes above are possible in a TtR HEV. By design, the direct ESS recharging mechanism by the ICE described in modes (v)–(vii) is unavailable due to the absence of mechanical torque coupling device. Therefore, the recharging of the ESS is only attainable when the vehicle is in motion, which is described by mode (ix). ESS recharging cannot occur otherwise. This design choice also obviates mode (viii) by default because that particular mode is exclusive to series HEV configuration [5, 9, 10, 12, 25]. In this paper, fuzzy logic is used to carefully formulate the EMS to work within these five possible modes in order to produce the best possible power flow solution for the proposed TtR HEV. Power flow in a TtR HEV is as illustrated in Fig. 2.

Power flow in TtR HEV
3 Modelling of Simulation Platform
3.1 Overview
The simulation platform for the TtR HEV was built in Simulink for efficient development. The modified model of TtR HEV was based on the original series–parallel HEV accessed here [66]. Lookup tables are used in various parts of the model for quicker system response. The balance between model fidelity and simulation speed is critical for efficient development. The vehicle model and controller are modelled in a single environment to enable system-level optimisation. The modelling aspect includes the electrical system, mechanical, thermal and the control system of the vehicle. The simulation is done using Simulink over standard drive cycles.
The model in Fig. 3 consists of the control system block with multiple proportional integral (PI) controllers as well as a controller block for the fuzzy logic-based EMS. Recent proposal on the use of a hybrid neuro-fuzzy PI speed controller is one example of enhancement of PI controller efficiency applied in brushless DC motor speed control used here [67]. The mechanical system includes the ICE block and vehicle dynamics. The electrical system has an EM, generator, DC–DC converter and a battery for the ESS. In the electrical network of the system, a DC–DC converter is used to boost the battery voltage to the 500 V required by the DC network. A recent alternative to this system is available such as the use of ultra-sparse Z-source matrix converter as proposed by [68] which will be able to reduce the size of the system while increasing reliability without a hit to the computational load. A lookup table from datasheets is used to specify the relationship between speed and torque. Lookup table is often used for its simplicity but often the efficiency level leaves a lot to be desired. Recent publications such as [69] might serve as an optimisation solution in the future. Other parameter values included in the model allow for modelling of torque-dependent and torque-independent losses. These parameters are parameterised using MATLAB® variables. The EM has an electrical connection on one side and a mechanical connection on the other, providing a link between the electrical network and the mechanical drivetrain of the HEV. The generator follows the same structure. This all-in-one environment makes it easier to check for any integration issues between the electrical network, mechanical drivetrain and the control system. The EM and generator and their respective control block included in this model are basic models for the sake of design simplicity and to have a platform that iterates quickly. However, if production of a real-life vehicle model is considered, recent publications such as [70, 71] shall be handy for further enhancements in future energy consumption forecasting.

TtR HEV model in Simulink
The vehicle model includes tire model with transient and steady-state dynamics and vehicle longitudinal dynamics for fuel economy analysis. The ICE model uses a lookup table relating speed to available power. The input for the ICE is the throttle signal coming from the PI controller representing the driver, and the mechanical output port connects the ICE to the rest of the mechanical drivetrain. For a TtR HEV, the ICE is driving the front wheels of the vehicle, whereas the rear wheels are driven directly by the EM.
3.2 Vehicle Modelling
The vehicle body is modelled based on the dynamic equations [72, 73]
Vehicle motion is determined by the net forces and torques acting on the vehicle. The angle β is defined as positive in the clockwise manner when x is moving towards the left but positive in the counter-clockwise direction when the motion for x is towards the right. By the assumption that the net pitch torque on the vehicle and normal acceleration are zero or when the pitch angle of the vehicle is assumed to have reached a steady-state value, the normal force distribution on the tires can be determined [72, 73]. Taking moments about the contact point of the front and rear wheels yield normal load forces of the front and rear wheels, respectively, as [72, 73]
3.3 Battery Model
The battery model was designed using SimElectronics of MATLAB®. The advantage of this model is that it can be used to represent many different types of batteries and there are relatively few parameters and they can be easily found on datasheets. SimPowerSystems of MATLAB® provides many pre-defined battery models. They are selectable from a pull-down menu, and they come with full parameterisation. Documentation provides in detail on how these batteries are modelled.
The battery model used here represented by a discharge model that can accurately denote the voltage dynamics of the battery with varied current value and the open circuit voltage (OCV) is represented as a function of SOC [74]. A term known as the polarisation voltage is added into the equation to better represent the OCV behaviour, and a slightly modified polarisation resistance equation is used [74]. The battery voltage obtained is given by
where \(K\frac{Q}{Q - it} \cdot it\) represents the polarisation voltage and \(K\frac{Q}{Q - it}\) is the polarisation resistance. The highlight of this model is the use of a filtered current (\(i^{*}\)) flowing through the polarisation resistance resulting in a slow dynamic behaviour for a current step response [74].
Subjected to the battery type, the charge behaviour, specifically the end of charge (EoC) characteristic, differs. For lead-acid and Li-ion-type batteries used in this simulation, they have similar EoC characteristics [74]. The charge model equivalent circuit is similar to the discharge model but with different \(E_{\text{batt}}\) calculations depending on the type of batteries chosen, and for Li-ion battery chosen for this simulation, the following equation was used [73, 74]
The input for the battery model is the power demand of the vehicle which gives the information of the amount of power required by the vehicle from the battery pack. The SOC provides the information of the current or the amount of remaining energy stored in the battery pack to the EMS, which will determine and influence the decision in the EMS for the most suitable power split for the present driving conditions. In this model, the SOC is calculated by [66]
As previously mentioned, one of the downsides of TtR architecture is the lower efficiency recharging of the ESS due the unavailability of direct link from the mechanical drivetrain from where the required torque to turn the generator comes from. The external link through the road mechanism enacts high losses and only available when the vehicle is in motion and through regenerative braking. Therefore, one of the critical aspects of optimisation needed in a TtR is the ability to increase regenerative braking and recharging efficiency and fuzzy logic is indeed applicable in this regard as well such as in recent proposals in [75, 76].
3.4 EMS Controller
The control system of the model contains multiple PI controllers as well as a controller block consists of the fuzzy logic-based EMS block as can be seen in Fig. 4 [66]. Several lookup tables are used at various parts of the vehicle to make the system iterate quickly. Figure 4 illustrates the EMS controller block. Basic rules are imposed for the system based on five main inputs, namely current vehicle speed, ICE speed demand, current ICE speed, current SOC of ESS and total trip distance. Throttle signal encompassing ICE and EM speed demand from a PI controller representing the driver model is fed directly to the ICE and EM. Together with the output from the EMS controller, ICE_Enable, Mot_Enable and Gen_Enable signals are generated depending on the demand and thus vehicle operating point is decided in real time.

Fuzzy logic-based EMS controller block
Dynamic programming (DP) is a one of the most commonly used tools in many studies for the problem of energy management of HEV to produce near-optimal solution for fuel consumption and emission, for examples [53, 55, 77,78,79], thus the DP theory will not be explained in detail in this paper. However, unlike the fuzzy logic-based EMS proposed in this paper, DP requires the precise knowledge of the future driving cycle and often involves complex calculation and algorithm which takes a lot of computational time hence it cannot be used as an online EMS [43]. In [43], DP has been used to find the optimal values of the ICE torque and the gear number that minimise the global fuel consumption over standard drive cycles in the form of an offline EMS controller. The aim is to observe the optimal behaviour for the HEV in order to build a near-optimal control laws to be embedded in the fuzzy logic-base EMS controller that will attempt to replicate this optimal behaviour in real time.
Since PHEV is used in this simulation, the vehicle will be run in only two modes which are pure electric and hybrid. In hybrid mode, ideally the engine should always work around its maximum efficiency. To maximise the fuel saving of the proposed TtR HEV, the CD mode is prioritised to take full advantage of the external charging feature. Depending on the level of SOC and remaining distance, the optimal working mode chosen by the EMS is the required power to the wheel compared to the EM power threshold. The lines where the required power to the wheel is lower than the power threshold of the EM, the mode of choice is all-electric, and the ICE stays OFF. The vehicle switches into hybrid mode when the required power to the wheel exceeds the threshold line, Pth [43]. In other words, the level of Pth will be the deciding factor for the mode selection of the EMS controller. Generally, Pth value increases for high-speed cycles and decreases for low-speed cycles. Additionally, higher initial SOC yields higher Pth value as well in order to favour all-electric mode. The choice of Pth values used in this simulation was obtained from DP results from [43]. The proposed controller will prioritise all-electric mode for as long as the required power is below the Pth line using the accelerator signal from the driver model as the control target. When hybrid mode is chosen, the right power level will be imposed to the EM to add to the power from the ICE in order to satisfy the power requirement. The selection of mode between all-electric and hybrid is done by the fuzzy logic controller using the set of rules from the DP results.
As the selected Pth values depend on the driving conditions, the fuzzy logic controller will match the driving pattern corresponding to slow, medium and fast, which covers a wide speed range with different speed distribution profiles. A membership function of vehicle velocity for the three speed cycles was plotted and approximated using Gaussian distributions as per Fig. 5 [43].

Membership function for vehicle speed
The membership functions of the speed input for the fuzzy logic controller are built using these distributions [43]. As explained earlier, Pth values vary with the initial SOC and the total length of the trip. For the simplicity of the controller operation, a separate value known as the global discharge rate (GDR) was defined and is given by [43]
where SOCinit is the initial SOC and ltot is the total length of the trip represented by GPS input in this simulation. For a given facility-specific driving cycle with a defined length, the global discharge rate will be determined by the initial SOC with the final SOC targeted at 30% to avoid damage to the ESS. For a high enough initial SOC such a fully charged PHEV, and for a short trip consists of only slow speed driving pattern, the trip will be inclusive of the AER of the PHEV and no mode switch is necessary and no fuel will be consumed. Following yet another set of rules defined in [43], there are consistent values of optimal Pth for each of the three speed categories and for each value of GDR between 0%/km VVL and the maximum level that was determined at 8%/km for VVH as shown in Fig. 6 [43].

Membership function for GDR
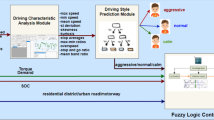
The fuzzy logic controller is designed based on these analysis with two inputs, current vehicle speed and GDR, and Pth as the sole output as can be seen in Fig. 7.

MODE logic for the fuzzy logic controller
During the operation of the vehicle, the fuzzy logic controller categorises the current speed into the three speed distributions. At the same time, the second input is the real-time GDR computed from the remaining SOC compared to the target SOC and the remaining distance. Using these inputs, the controller will dictate the operating modes of the vehicle for the duration of the trip in real time. The fuzzy logic controller used here is a Sugeno type and the output is the Pth value. AND logic operators are used for each rule, and an appropriate Pth value is executed depending on the inputs as in Table 1 [43].
Based on the membership functions and rules set above, the final surface plot for Pth is as shown in Fig. 8.

Pth surface plot for fuzzy rules. a Pth when speed is SLOW. b Pth when speed is MEDIUM. c Pth when speed is FAST
4 Simulation Results and Discussions
Test run simulations on standard drive cycles have been conducted on MATLAB® version R2016a to verify the performance of the proposed TtR HEV with fuzzy logic-based EMS. Before certified for use in practice, several key performance indexes such as the drivability, fuel economy, EMS performance and SOC among others need to be verified to make sure the vehicle is able to perform as intended and, for certain criteria, comply with standards implied by governing bodies. For this paper, the emphasis is on drivability and fuel economy of the TtR HEV to make sure first and foremost, the proposed TtR HEV is capable of responding to driver’s demand while maintaining acceptable level of fuel economy. For comparison purpose, the results for the original series–parallel HEV using rule-based EMS from [66] are used. The parameters for the HEVs used in this simulation are as presented in Table 2.
4.1 Simulation Results
For ECE R15 drive cycle, it can be observed in Fig. 9a the TtR HEV has managed to perform as expected and in terms of fuel economy, the TtR HEV, represented by the solid plot, yields a 0.13 L of consumption compared to 0.1652 L for the reference model, represented by the dotted plot, which is a 21% improvement as shown in Fig. 9b. The low power and speed demand of ECE R15 are the main reasons for this huge saving on fuel for the proposed TtR HEV where the heavy lifting is done mostly by the EM thus putting less strain on the ICE.

TtR HEV performance on ECE R15. a Vehicle speed based on speed demand. b Fuel consumption comparison
On EUDC, the performance of the proposed TtR HEV as represented in Fig. 10a exhibits a similarly smooth drivability responding to the requested speed. The fuel consumption is at 0.2974 L compared to 0.6581 L of the reference model, equating to a 54.8% improvement as shown in Fig. 10b. The EUDC consists of mid to high-speed driving with multiple prompt acceleration sequences.

TtR HEV performance on EUDC. a Vehicle speed based on speed demand. b Fuel consumption comparison
Moving on to longer drive cycles to observe the performance of the TtR HEV on a slightly extended course, on NEDC which consists of mainly low speed driving, the proposed TtR HEV performs well responding to the driver’s demand as per Fig. 11a. In terms of fuel consumption, the proposed architecture compares favourably with a fuel consumption of just 0.8242 L, down 38.1% from 1.331 L of the reference model as shown in Fig. 11b.

TtR HEV performance on NEDC. a Vehicle speed based on speed demand. b Fuel consumption comparison
Another example for an extended driving is a simulation on HWFET with mostly high-speed cruising which represents the driving condition on highways. From the result in Fig. 12a, it can be observed that there is a slight overshoot in the beginning when a rapid acceleration was applied. From the fuel consumption pattern in Fig. 12b, the proposed model achieved 0.541 L compared to 1.422 L by the reference model which is a 62% improvement.

TtR HEV performance on HWFET. a Vehicle speed based on speed demand. b Fuel consumption comparison
As can be seen from the simulation results, the efficiency gain in terms of fuel consumption of the proposed TtR HEV model is prominent compared to the reference model which is a series–parallel HEV with rule-based EMS. Due to the PHEV design applied with the proposed model, the fully charged ESS helps the EMS to prioritise the EM over ICE for providing power to the wheels. To put things into perspective, comparisons in fuel consumption (L/100 km) on NEDC and HWFET drive cycles are provided in Table 3 between the proposed TtR HEV against the following publications on NEDC and HWFET drive cycles.
-
(i)
Parallel 3-wheeler PHEV with fuzzy-based blended control strategy [43].
-
(ii)
Parallel HEV with fuzzy multi-objective control strategy (FMCS) [42].
-
(iii)
Parallel PHEV with online power-balancing strategy assisted by integrated starter generator [80].
4.2 Discussions
The proposed TtR HEV has shown promising outlook in terms of efficiency compared to the reference model. The modified model has demonstrated its ability to respond soundly to driver’s input while keeping the fuel consumption at the minimum thanks to the PHEV architecture which allows the ESS to be recharged fully before every trip. Significantly lower fuel consumption can be observed throughout all drive cycles due to the large overhead in initial SOC which contributed to higher GDR value in Eq. (9). The EM is utilised more frequently compared to the ICE in providing the required power to the wheels thus resulting in the low fuel consumption. It can also be observed that the gain is bigger during higher speed cycles such as the EUDC and HWFET which means that the proposed TtR HEV model operated the ICE more efficiently compared to the reference model. However, a slight instability can be observed in the beginning of HWFET and this is the results of the system attempted to respond to the sudden acceleration request; both the ICE and EM are forced to feed the power to the wheel, but due to no proper toque coupling device, the amount of supplied power temporarily exceeds the driver’s request. Although the discrepancy is rectified shortly after, this kind of spike in power output is undesirable in practice because it might cause an out-of-control situation for the driver. Further investigation shall be conducted to address the issue.
Due to the higher initial SOC and drive cycles only up to around 17 km in distance, all the simulations are within the AER for a standard PHEV. Although AER is unavailable in the proposed model due to the blended hybrid mode approach, the results have proven that the ICE is only engaged for high power demand situations which rarely occur in the simulated drive cycles which has resulted in a similar outcome pattern. If the trip distance is longer, the fuel consumption of the TtR HEV is expected to hike significantly due to the depleted ESS and the limited on-board recharging capability of the TtR architecture which will force the ICE to provide most of the power demand while also preserving the ESS. However, this impact can be reduced with the use of a smaller displacement ICE, for example, the 50 kW ICE used in [42, 80] compared to the 114 kW version used here.
As for the comparison with the results from other publications, the proposed TtR HEV performs unfavourably on lower average speed cycle such as the NEDC but compares well on higher average speed cycle such as the HWFET. The deficit in fuel consumption on NEDC is due to the fact that the proposed model is using a bigger ICE compared to the 2-cylinder, 600 cc ICE used in (i) [43] and the 1.5 L, 50 kW ICE used in both (ii) [42] and (iii) [80]. The bigger ICE contributed to higher fuel consumption even when it is idle. However, for the higher average speed on HWFET, bar the lighter 3-wheeler in (i), the proposed model compares favourably in the fuel consumption department due to the ICE running in an efficient manner in blended hybrid mode and bigger ICE performs better at higher speed compared to the smaller ICE. The proposed model outperforms (ii) by 19.8% and (iii) by 14.8%.
5 Conclusions and the Way Forward
From the simulation results, several conclusions can be interpreted. In general, the modelling of the TtR HEV can be considered as a success because this model provides a valid platform for simulation and further developments thanks to its exploits of commonly used equations in vehicle dynamics simulations. The traits of MATLAB® as a powerful simulation tool have provided a robust platform for an efficient HEV development, and the proposed TtR HEV has managed to perform as expected on standard drive cycles to provide invaluable data for future prospects of the project. The omission of the planetary gear system is a crucial part differentiating this HEV architecture from conventional parallel HEV configuration. A well-formulated EMS controller is crucial to take over the task of harmonising issues between the ICE, EM and generator. The slight spike in HWFET might be resulted by the lack of a proper on-board torque coupling device which has resulted in a slightly botched power delivery when both the ICE and EM are pushed hard, for example, in a hard acceleration mode. This is something that should be looked upon and still can be improved further in the future.
Overall, the fuzzy logic-based EMS formulated for the proposed TtR HEV has allowed the vehicle to perform as intended as the fuel consumption is reduced by 21.9 up to 62% compared to the reference model. And with the proposed model also compares favourably with other published results particularly in the higher average speed cycle such as the HWFET, the prospect for the proposed model is encouraging. The proposed TtR HEV is similar to a retrofit HEV as in the electrical drivetrain being added to an existing conventional drivetrain. Therefore, the ICE used here is still similar to the one used in conventional vehicle and is not downsized as the literature suggested. It can be observed from the results that the ICE uses unnecessary fuel over the drive cycle in its idle state. This is the main reasons that caused the ICE to miss its efficiency curve and is forced to operate outside its efficient region, especially on lower average speed cycles. This issue can be remedied with the use of a smaller, more efficient ICE which can be paired with an engine start-stop controller which will only turn the ICE on when needed and off when not in use. These refinements should be the priority in the next phase of the currently ongoing project.
From simulations, the proposed TtR HEV is able to perform exceptionally on all drive cycles compared to the reference model. However, the modified architecture’s performance on extended drive cycles which extend beyond standard AER is still unknown and should be investigated further mainly due to the lower on-board recharging efficiency of the TtR architecture. However, based on the available simulation data, the fuzzy logic-based EMS is proving itself to be a suitable EMS controller for the modified architecture and as far the model is concerned, it still can be further improved in the future. The fuzzy logic-based EMS controller has been successfully synthesised but further improvement and optimisation is still required. The results from these simulations provide useful information for future EMS development, especially regarding the strengths and weaknesses of the proposed TtR HEV model. As EMS controllers must be designed to cater to a specific target configuration, there lies yet further potential of the proposed architecture to perform more efficiently with a much-refined controller. The future target of the research is to further tweak the EMS design and modelling of the vehicle itself in order to extract more performance.
Abbreviations
- g :
-
Gravitational acceleration = 9.81 m/s2
- β :
-
Road incline angle
- m :
-
Vehicle total mass
- V x :
-
Longitudinal vehicle velocity
- V W :
-
Wind speed (+ for headwind, − for tailwind)
- n :
-
Number of wheels on each axle
- F xf, F xr :
-
Longitudinal forces on front and rear wheels at ground contact points
- A F :
-
Effective frontal vehicle cross-sectional area
- C d :
-
Aerodynamic drag coefficient
- ρ :
-
Mass density of air = 1.18 kg/m3
- F zf, F zr :
-
Normal forces acting on front and rear wheels at ground contact points
- h :
-
Height of vehicle’s centre of gravity above the ground
- F d :
-
Aerodynamic drag force
- a, b :
-
Distance of front and rear axles, respectively, from centre of gravity
- \(V_{\text{batt}}\) :
-
Battery voltage
- \(E_{0}\) :
-
Battery constant voltage
- \(K\) :
-
Polarisation constant
- \(Q\) :
-
Battery capacity
- \(it = \smallint i {\text{d}}t\) :
-
Actual battery charge
- \(A\) :
-
Exponential zone amplitude
- \(B\) :
-
Exponential zone time constant inverse
- \(R\) :
-
Internal resistance
- \(i\) :
-
Battery current
- \(i^{*}\) :
-
Filtered current
References
Atabani, A.E., Badruddin, I.A., Mekhilef, S., Silitonga, A.S.: A review on global fuel economy standards, labels and technologies in the transportation sector. Renew. Sustain. Energy Rev. 15, 4586–4610 (2011). https://doi.org/10.1016/j.rser.2011.07.092
Silitonga, A.S., Atabani, A.E., Mahlia, T.M.I.: Review on fuel economy standard and label for vehicle in selected ASEAN countries. Renew. Sustain. Energy Rev. 16, 1683–1695 (2012). https://doi.org/10.1016/j.rser.2011.12.006
Mahlia, T.M.I., Tohno, S., Tezuka, T.: A review on fuel economy test procedure for automobiles: implementation possibilities in Malaysia and lessons for other countries. Renew. Sustain. Energy Rev. 16, 4029–4046 (2012). https://doi.org/10.1016/j.rser.2012.03.032
Axsen, J., Kurani, K.S.: Hybrid, plug-in hybrid, or electric—What do car buyers want? Energy Policy 61, 532–543 (2013). https://doi.org/10.1016/j.enpol.2013.05.122
Sabri, M.F.M., Danapalasingam, K.A., Rahmat, M.F.: A review on hybrid electric vehicles architecture and energy management strategies. Renew. Sustain. Energy Rev. 53, 1433–1442 (2016). https://doi.org/10.1016/j.rser.2015.09.036
Egbue, O., Long, S.: Barriers to widespread adoption of electric vehicles: an analysis of consumer attitudes and perceptions. Energy Policy 48, 717–729 (2012). https://doi.org/10.1016/j.enpol.2012.06.009
International Energy Agency (IEA): Global EV Outlook 2016: Beyond One Million Electric Cars, 2016. https://www.iea.org/publications/freepublications/publication/Global_EV_Outlook_2016.pdf
International Energy Agency (IEA), Global EV Outlook: Two million and counting. IEA Publ. 2017, 1–71 (2017). https://doi.org/10.1787/9789264278882-en
Husain, I.: Electric and Hybrid Vehicles: Design Fundamentals, 2nd edn. CRC Press (2010) 524
Liu, W.: Introduction to Hybrid Vehicle System Modeling and Control (2013). https://doi.org/10.1002/9781118407400
Chan, C.C.: The state of the art of electric, hybrid, and fuel cell vehicles. Proc. IEEE 95, 704–718 (2007). https://doi.org/10.1109/JPROC.2007.892489
Ehsani, M., Yimin, G., Miller, J.M.: Hybrid electric vehicles: architecture and motor drives. Proc. IEEE 95, 719–728 (2007). https://doi.org/10.1109/jproc.2007.892492
Payri, F., Guardiola, C., Pla, B., Blanco-Rodriguez, D.: A stochastic method for the energy management in hybrid electric vehicles. Control Eng. Pract. 29, 257–265 (2014). https://doi.org/10.1016/j.conengprac.2014.01.004
Sezer, V., Gokasan, M., Bogosyan, S.: A novel ECMS and combined cost map approach for high-efficiency series hybrid electric vehicles. IEEE Trans. Veh. Technol. 60, 3557–3570 (2011). https://doi.org/10.1109/TVT.2011.2166981
Saeks, R., Cox, C.J., Neidhoefer, J., Mays, P.R., Murray, J.J.: Adaptive control of a hybrid electric vehicle. IEEE Trans. Intell. Transp. Syst. 3, 213–234 (2002). https://doi.org/10.1109/TITS.2002.804750
Won, J.S., Langari, R., Ehsani, M.: An energy management and charge sustaining strategy for a parallel hybrid vehicle with CVT. IEEE Trans. Control Syst. Technol. 13, 313–320 (2005). https://doi.org/10.1109/TCST.2004.838569
Huang, X., Tan, Y., He, X.: An intelligent multifeature statistical approach for the discrimination of driving conditions of a hybrid electric vehicle. IEEE Trans. Intell. Transp. Syst. 12, 453–465 (2011). https://doi.org/10.1109/TITS.2010.2093129
Montazeri-Gh, M., Poursamad, A., Ghalichi, B.: Application of genetic algorithm for optimization of control strategy in parallel hybrid electric vehicles. J. Franklin Inst. 343, 420–435 (2006). https://doi.org/10.1016/j.jfranklin.2006.02.015
Ebbesen, S., Elbert, P., Guzzella, L.: Battery state-of-health perceptive energy management for hybrid electric vehicles. IEEE Trans. Veh. Technol. 61, 2893–2900 (2012). https://doi.org/10.1109/TVT.2012.2203836
Mashadi, B., Emadi, S.A.M.: Dual-mode power-split transmission for hybrid electric vehicles. IEEE Trans. Veh. Technol. 59, 3223–3232 (2010). https://doi.org/10.1109/TVT.2010.2049870
Moreno, J., Ortuzar, M.E., Dixon, J.W.: Energy-management system for a hybrid electric vehicle, using ultracapacitors and neural networks. IEEE Trans. Ind. Electron. 53, 614–623 (2006). https://doi.org/10.1109/TIE.2006.870880
Borhan, H., Member, S., Vahidi, A., Phillips, A.M., Kuang, M.L., Kolmanovsky, I.V., Di Cairano, S.: MPC-based energy management of a power-split hybrid electric vehicle. IEEE Trans. Control Syst. Technol. 20, 593–603 (2012)
Salmasi, F.R.: Control strategies for hybrid electric vehicles: evolution, classification, comparison, and future trends. Veh. Technol. IEEE Trans. 56, 2393–2404 (2007). https://doi.org/10.1109/TVT.2007.899933
Malikopoulos, A.A.: Supervisory power management control algorithms for hybrid electric vehicles: a survey. IEEE Trans. Intell. Transp. Syst. 15, 1869–1885 (2014). https://doi.org/10.1109/tits.2014.2309674
Wu, G., Zhang, X., Dong, Z.: Powertrain architectures of electrified vehicles: review, classification and comparison. J. Franklin Inst. 352, 425–448 (2015). https://doi.org/10.1016/j.jfranklin.2014.04.018
Kumar, L., Jain, S.: Electric propulsion system for electric vehicular technology: a review. Renew. Sustain. Energy Rev. 29, 924–940 (2014). https://doi.org/10.1016/j.rser.2013.09.014
Hannan, M.A., Azidin, F.A., Mohamed, A.: Hybrid electric vehicles and their challenges: a review. Renew. Sustain. Energy Rev. 29, 135–150 (2014). https://doi.org/10.1016/j.rser.2013.08.097
Finesso, R., Spessa, E., Venditti, M., Torino, P.: Optimization of the layout and control strategy for parallel through-the-road hybrid electric vehicles. Anal. Layout Perform. (2014). https://doi.org/10.4271/2014-01-1798.Copyright
Zulkifli, S.A., Mohd, S., Saad, N., Aziz, A.R.A.: Operation and control of split-parallel, through-the-road hybrid electric vehicle with in-wheel motors. Int. J. Automot. Mech. Eng. 11, 2793–2808 (2015). https://doi.org/10.15282/ijame.11.2015.54.0235
Meisel, J., Shabbir, W., Evangelou, S.A.: Evaluation of the through-the-road architecture for plug-in hybrid electric vehicle powertrains. In: 2013 IEEE Int. Electr. Veh. Conf. IEVC 2013. (2013). https://doi.org/10.1109/ievc.2013.6681143
Galvagno, E., Morina, D., Sorniotti, A., Velardocchia, M.: Drivability analysis of through-the-road-parallel hybrid vehicles. Meccanica 48, 351–366 (2013). https://doi.org/10.1007/s11012-012-9606-6
Kaiser, G., Holzmann, F., Chretien, B., Korte, M., Werner, H.: Torque vectoring with a feedback and feed forward controller—applied to a through the road hybrid electric vehicle. IEEE Intell. Veh. Symp. Proc. 448–453 (2011). https://doi.org/10.1109/ivs.2011.5940459
Moghbeli, H.: Fuzzy energy control strategy of through-to-road hybrid electric vehicle. In: Ind. Electron. (ISIE), 2014 IEEE 23rd Int. Symp., 2014: pp. 1660–1665
Pisanti, C., Rizzo, G., Marano, V.: Energy management of through-the-road parallel hybrid vehicles 2118–2124 (2014). http://dx.doi.org/10.3182/20140824-6-ZA-1003.02494
Meisel, J., Shabbir, W., Evangelou, S.A.: A practical control methodology for parallel plug-in hybrid electric vehicle powertrains, 2013 9th IEEE Veh. Power Propuls. Conf. IEEE VPPC 2013, 30–35 (2013). https://doi.org/10.1109/VPPC.2013.6671659
Zulkifli, S.A., Syaifuddin Mohd, M. Maharun, M., Bakar, N.S.A., Idris, S., Samsudin, S.H., Firmansyah, F., Adz, J.J., Misbahulmunir, M., Abidin, E.Z.Z., Syafiq Mohd, M., Saad, N., Aziz, A.R.A.: Design and development of split-parallel through-the road retrofit hybrid electric vehicle with in-wheel motors. In: IOP Conf. Ser. Mater. Sci. Eng. 100 (2015). https://doi.org/10.1088/1757-899x/100/1/012039
Holdstock, T., Sorniotti, A., Shead, L., Viotto, F., Cavallino, C., Bertolotto, S.: Linear and non-linear methods to analyse the drivability of a through-the-road parallel hybrid electric vehicle. Int. J. Powertrains 2, 52–77 (2013)
Young, M., Molen, G.M., Oglesby, D., Crawford, K., Walp, K., Lewis, R., Whitt, C., Phillips, S.: The design and development of a through-the-road parallel diesel electric hybrid. In: VPPC 2007—Proc. 2007 IEEE Veh. Power Propuls. Conf. (2007) 511–518
Mamdani, E.H.: Application of fuzzy algorithms for control of simple dynamic plant. Proc. Inst. Electr. Eng. 121, 1585 (1974). https://doi.org/10.1049/piee.1974.0328
Takagi, T., Sugeno, M.: Fuzzy identification of systems and its applications to modeling and control. IEEE Trans. Syst. Man Cybern. 15, 116–132 (1985)
Syed, F.U., Kuang, M.L., Smith, M., Okubo, S., Ying, H.: Fuzzy gain-scheduling proportional-integral control for improving engine power and speed behavior in a hybrid electric vehicle. IEEE Trans. Veh. Technol. 58, 69–84 (2009). https://doi.org/10.1109/TVT.2008.923690
Zhang, Y., Liu, H.-P.: Fuzzy multi-objective control strategy for parallel hybrid electric vehicle. IET Electr. Syst. Transp. 2, 39 (2012). https://doi.org/10.1049/iet-est.2011.0041
Dubois, M.R., Desrochers, A., Denis, N.: Fuzzy-based blended control for the energy management of a parallel plug-in hybrid electric vehicle. IET Intell. Transp. Syst. 9, 30–37 (2015). https://doi.org/10.1049/iet-its.2014.0075
Lee, H.-D., Sul, S.-K.: Fuzzy-logic-based torque control strategy for parallel-type hybrid electric vehicle. Ind. Electron. IEEE Trans. 45, 625–632 (1998). https://doi.org/10.1109/41.704891
Langari, R., Won, J.-S.: Intelligent energy management agent for a parallel hybrid vehicle-part I: system architecture and design of the driving situation identification process. IEEE Trans. Veh. Technol. 54, 925–934 (2005). https://doi.org/10.1109/TVT.2005.844685
Dawei, M., Yu, Z., Meilan, Z., Risha, N.: Intelligent fuzzy energy management research for a uniaxial parallel hybrid electric vehicle. Comput. Electr. Eng. (2016). https://doi.org/10.1016/j.compeleceng.2016.03.014
Li, S.G., Sharkh, S.M., Walsh, F.C., Zhang, C.N.: Energy and battery management of a plug-in series hybrid electric vehicle using fuzzy logic. IEEE Trans. Veh. Technol. 60, 3571–3585 (2011). https://doi.org/10.1109/TVT.2011.2165571
Cheng, C., McGordon, A., Jones, R.P., Jennings, P.A.: Development of a comprehensive and flexible forward dynamic powertrain simulation tool for various hybrid electric vehicle architectures. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 226, 385–398 (2012). https://doi.org/10.1177/0954407011417764
Pérez, L.V., Bossio, G.R., Moitre, D., García, G.O.: Optimization of power management in an hybrid electric vehicle using dynamic programming. Math. Comput. Simul. 73, 244–254 (2006). https://doi.org/10.1016/j.matcom.2006.06.016
Chen, Z., Mi, C.C., Xiong, R., Xu, J., You, C.: Energy management of a power-split plug-in hybrid electric vehicle based on genetic algorithm and quadratic programming. J. Power Sources 248, 416–426 (2014). https://doi.org/10.1016/j.jpowsour.2013.09.085
Di Cairano, S., Bernardini, D., Bemporad, A., Kolmanovsky, I.V.: Stochastic MPC with learning for driver-predictive vehicle control and its application to HEV energy management. IEEE Trans. Control Syst. Technol. 22, 1018–1031 (2014). https://doi.org/10.1109/TCST.2013.2272179
Chen, Z., Xia, B., You, C., Mi, C.C.: A novel energy management method for series plug-in hybrid electric vehicles. Appl. Energy 145, 172–179 (2015). https://doi.org/10.1016/j.apenergy.2015.02.004
Chen, Z., Mi, C.C., Xu, J., Gong, X., You, C.: Energy management for a power-split plug-in hybrid electric vehicle based on dynamic programming and neural networks. IEEE Trans. Veh. Technol. 63, 1567–1580 (2014). https://doi.org/10.1109/TVT.2013.2287102
Liu, J., Peng, H.: Modeling and control of a power-split hybrid vehicle. IEEE Trans. Control Syst. Technol. 16, 1242–1251 (2008)
Opila, D.F., Wang, X., McGee, R., Gillespie, R.B., Cook, J.A., Grizzle, J.W.: An energy management controller to optimally trade off fuel economy and drivability for hybrid vehicles. IEEE Trans. Control Syst. Technol. 20, 1490–1505 (2012). https://doi.org/10.1109/TCST.2011.2168820
Zhang, P., Yan, F., Du, C.: A comprehensive analysis of energy management strategies for hybrid electric vehicles based on bibliometrics. Renew. Sustain. Energy Rev. 48, 88–104 (2015). https://doi.org/10.1016/j.rser.2015.03.093
Sorrentino, M., Rizzo, G., Arsie, I.: Analysis of a rule-based control strategy for on-board energy management of series hybrid vehicles. Control Eng. Pract. 19, 1433–1441 (2011). https://doi.org/10.1016/j.conengprac.2011.07.017
Yin, H., Zhou, W., Li, M., Ma, C., Zhao, C.: An adaptive fuzzy logic based energy management strategy on battery/ultracapacitor hybrid electric vehicles. IEEE Trans. Transp. Electrif. 2, 1 (2016). https://doi.org/10.1109/TTE.2016.2552721
Khan, M.A.S.K., Rahman, M.A.: Implementation of wavelet-based controller for battery storage system of hybrid electric vehicles. IEEE Trans. Ind. Appl. 47, 2241–2249 (2011). https://doi.org/10.1109/TIA.2011.2161530
Kermani, S., Delprat, S., Guerra, T.M., Trigui, R., Jeanneret, B.: Predictive energy management for hybrid vehicle. Control Eng. Pract. 20, 408–420 (2012). https://doi.org/10.1016/j.conengprac.2011.12.001
Chen, Z., Xiong, R., Wang, C., Cao, J.: An on-line predictive energy management strategy for plug-in hybrid electric vehicles to counter the uncertain prediction of the driving cycle. Appl. Energy 185, 1663–1672 (2017). https://doi.org/10.1016/j.apenergy.2016.01.071
Panday, A., Bansal, H.O.: A review of optimal energy management strategies for hybrid electric vehicle. Int. J. Veh. Technol. 2014, 1–19 (2014). https://doi.org/10.1155/2014/160510
Amjad, S., Neelakrishnan, S., Rudramoorthy, R.: Review of design considerations and technological challenges for successful development and deployment of plug-in hybrid electric vehicles. Renew. Sustain. Energy Rev. 14, 1104–1110 (2010). https://doi.org/10.1016/j.rser.2009.11.001
Mehrdad Ehsani, A.E., Yimin G., Sebastien E.G.: Modern electric, hybrid electric, and fuel cell vehicles: fundamentals. Theory Des. 2004. https://doi.org/10.1201/9781420037739
Zhang, C., Vahidi, A., Pisu, P., Xiaopeng, L., Tennant, K.: Role of terrain preview in energy management of hybrid electric vehicles. Veh. Technol. IEEE Trans. 59, 1139–1147 (2010). https://doi.org/10.1109/TVT.2009.2038707
Miller, S.: Hybrid-electric vehicle model in simulink. MATLAB Cent. File Exch. https://www.mathworks.com/matlabcentral/fileexchange/28441 (2017). Accessed 12 Mar 2016
Mansouri, M., Kaboli, S.H.A., Ahmadian, J., Selvaraj, J.: A hybrid neuro-fuzzy—P.I. speed controller for B.L.D.C. enriched with an integral steady state error eliminator. In: Proc.—2012 IEEE Int. Conf. Control Syst. Comput. Eng. ICCSCE 2012, 2013, pp. 234–237. https://doi.org/10.1109/iccsce.2012.6487147
Sebtahmadi, S.S., Azad, H.B., Kaboli, S.H.A., Islam, M.D., Mekhilef, S.: A PSO-DQ current control scheme for performance enhancement of Z-source matrix converter to drive IM fed by abnormal voltage. IEEE Trans. Power Electron. 33, 1666–1681 (2017). https://doi.org/10.1109/TPEL.2017.2679118
Modiri-Delshad, M., Aghay Kaboli, S.H., Taslimi-Renani, E., Rahim, N.A.: Backtracking search algorithm for solving economic dispatch problems with valve-point effects and multiple fuel options. Energy 116, 637–649 (2016). https://doi.org/10.1016/j.energy.2016.09.140
Kaboli, S.H.A., Selvaraj, J., Rahim, N.A.: Long-term electric energy consumption forecasting via artificial cooperative search algorithm. Energy 115, 857–871 (2016). https://doi.org/10.1016/j.energy.2016.09.015
Kaboli, S.H.A., Fallahpour, A., Selvaraj, J., Rahim, N.A.: Long-term electrical energy consumption formulating and forecasting via optimized gene expression programming. Energy 126, 144–164 (2017). https://doi.org/10.1016/j.energy.2017.03.009
Rajamani, R.: Vehicle Dynamics and Control, 2nd edn. Springer, New York (2012). https://doi.org/10.1007/b22134
MathWorks Librar (n.d.)
Tremblay, O., Dessaint, L.A.: Experimental validation of a battery dynamic model for EV applications. World Electr. Veh. J. 3, 1–10 (2009)
Asadi, H., Kaboli, S.H.A., Safari, M.J.: A review on Li-ion battery charger techniques and optimize battery charger performance by fuzzy logic. In: Proc. 2011 Int. Conf. Inf. Intell. Comput., 2011, pp. 89–96. https://doi.org/10.7763/ipcsit
Asadi, H., Aghay Kaboli, S.H., Mohammadi, A., Oladazimi, M.: Fuzzy-control-based five-step Li-ion battery charger by using AC impedance technique. In: Proc. SPIE—Int. Soc. Opt. Eng., 2012. https://doi.org/10.1117/12.920980
Johannesson, L., Asbogard, M., Egardt, B.: Assessing the potential of predictive control for hybrid vehicle powertrains using stochastic dynamic programming. IEEE Trans. Intell. Transp. Syst. 8, 71–83 (2007). https://doi.org/10.1109/TITS.2006.884887
Vinot, E., Trigui, R., Cheng, Y., Espanet, C., Bouscayrol, A., Reinbold, V.: Improvement of an EVT-based HEV using dynamic programming. IEEE Trans. Veh. Technol. 63, 40–50 (2014). https://doi.org/10.1109/TVT.2013.2271646
Zhang, S., Xiong, R., Cao, J.: Battery durability and longevity based power management for plug-in hybrid electric vehicle with hybrid energy storage system. Appl. Energy 179, 316–328 (2016). https://doi.org/10.1016/j.apenergy.2016.06.153
Adhikari, S., Halgamuge, S.K., Watson, H.C.: An online power-balancing strategy for a parallel hybrid electric vehicle assisted by an integrated starter generator. IEEE Trans. Veh. Technol. 59, 2689–2699 (2010). https://doi.org/10.1109/TVT.2010.2051048
Acknowledgements
Funding was provided by Ministry of Higher Education, Malaysia (Skim Latihan Akademik IPTA), Universiti Teknologi Malaysia (Research University Grant (GUP) Tier 1, Phase 1/2017, grant number Q.J130000.2523.17H18) and Universiti Malaysia Sarawak.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Mohd Sabri, M.F., Danapalasingam, K.A. & Rahmat, M.F. Improved Fuel Economy of Through-the-Road Hybrid Electric Vehicle with Fuzzy Logic-Based Energy Management Strategy. Int. J. Fuzzy Syst. 20, 2677–2692 (2018). https://doi.org/10.1007/s40815-018-0521-4
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40815-018-0521-4