
Abstract
Stability assessment is one of the important criteria for small crafts. Its relationship with safety and seaworthiness has made it an essential guideline to be examined from the early stage of the design process. This paper will focus on the transverse dynamic instability of small crafts that have been performed by the authors for a custom boat with three different deadrise angles. The effects of longitudinal center of gravity, LCG positions, and deadrise angles on the dynamics and hydrodynamics of the vessel in different trims are done. The major parameters taken into accounts in this investigation were the projected area of the planing bottom between the transom and chine, volume displaced, chine length, maximum breadth over chines, centroid of projected area, longitudinal center of gravity, loading coefficient, and length-to-beam ratio in a tabular form for each design. The probability of dynamic instability after reaching planing speed was compared with the guidelines from Blount and Codega. The conditions in which the deadrise angles failed to meet the guidelines were identified.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
11.1 Introduction
Stability is one of the important factors in determining a ship’s safety and seaworthiness while in operation. It is a mandatory requirement that the ship designers or shipbuilders submit the stability assessment report (stability booklet) to the related regulatory bodies such as classification society and marine department, well before the construction begins [1]. In a static condition, when a ship is heeled to one side by internal or external forces, the ship will return to its original upright position. This ability is usually expressed as the righting moment, which is the product of force (hydrostatic) and righting arm. Internal forces such as loading, unloading, cargo, and passenger/crew movement can be considered as static forces, whereas external forces such as wind, wave, and high-speed turning during operation should be considered as dynamic forces [1].
Any floating body stability assessment must meet both static and/or dynamic stability requirements. To protect the safety of crews and passengers, the ship must stay afloat and maintain a minimum level of stability while in operation. For large vessels, the hydrostatic stability assessment is adequate due to its large reserve of buoyancy but for small craft this is inadequate. As a result, dynamic stability analysis must be performed early in the design process. Although the static stability criteria have taken into accounts the requirements for high-speed boats, they are still solely based on the hydrostatic assessment [1]. This has in turn created many dedicated works in trying to create the hydrodynamic assessment or dynamic stability assessment to enhance the understanding of ship's dynamic behavior without using the time domain simulation; as a result, there are few guidelines on dynamic stability assessment [2]. One of the hull form design modifications is to change the deadrise angle that will affect the resistance and stability of the ship. It is important at this point to introduce some definitions and basic concepts related to the influence of the transverse dynamic stability to the deadrise angle. For many years, and still the standard practice today, the stability of a ship (static and dynamic) is assessed statically as reflected in many stability codes provided by the classification societies. However, until a more comprehensive approach of assessing the dynamic stability of a ship is established, the designer and naval architect must maneuver within the present guidelines [1].
The ratio of length to beam, the relationship between hull size and gross weight, and the longitudinal location of the center of gravity are three of the most critical parameters impacting the performance of planing hulls [3]. If hulls with various length–beam ratios are evaluated based on similar Ap/∇2/3, the comparison will be based on nearly similar values of hull area, hull volume, and hull structural weight, as stated in [4]. The distance between the LCG and the centroid of the region Ap, given as a percentage of the length Lp, is known as longitudinal CG location. This will allow the investigation on the impacts of different loadings and LCG locations.
Very little is known about the fundamental causes, and no guidelines presently exist to ensure adequate dynamic stability [2]. The buttocks of a vee-bottom hull are shaped like two airfoil sections that are joined at the keel. The pressure distribution is altered by any asymmetric port and starboard wetted surface or change in trim produced by a movement in weight or sea condition. The equivalent of an airfoil with a high thickness-to-chord ratio, a boat with highly curved buttocks is more prone to developing local low-pressure areas that may cause instabilities at planing speed.
A low-pressure area acting on the mid-body will decrease the transverse stability. The effect of the LCG on dynamic stability is that the trim curve produces the characteristic inflection point when the LCG is shifted forward and the running trim is decreased [2]. The hull loading in relation to the hull dimensions, as well as the position of the LCG, has a significant impact on the possible instability. Porpoising has been successfully predicted and avoided using the guidelines [1]. Most problem boats are that heavily loaded which is Ap/∇2/3 more than 5.8, and LCG are no more than 3% of the centroid of planing area, CAp [2].
Samian and Malik [1] found out that the current stability assessment HSC code does not give any guidance for ensuring acceptable dynamic stability. Dynamic instability is a complicated phenomenon that is influenced by a variety of factors, including speed, displacement, weight distribution, hull shape, and appendage design and placement. The relationship between each of the above factors cannot be discussed in depth since the precise relationship is unknown with great uncertainty. Nonetheless, this has led to the recommended design guideline presented in [2] to offer the designer with some tool for analyzing the dynamic stability of a fast boat. Negative trim (bow down) and inflection point might occur if the LCG is located near the centroid of the projected chine waterline area.
The position of the boat’s center of gravity is thought to be a major cause that poses serious consideration. To avoid dynamic transverse instability with an Ap/∇2/3 ratio of more than 5.8, the percentage of (CAp-LCG)/Lp should be more than 3%. Blount and Codega found that hulls with a high Lp/Bpx ratio are more likely to have a reverse slope or inflection, which is more likely to cause instability than hulls with a low Lp/Bpx ratio. To avoid the saddle point region, Ap/∇2/3 must be greater than 0.39 (Lp/Bpx) + 4.52 [2].
The Webb Institute of Naval Architecture evaluated a variety of prismatic model hulls with varied deadrise angles. Towing a small model aft while gradually moving the LCG aft till porpoising occurred was the procedure. The discovery that running trim angle, LCG location, deadrise angle, and speed were all factors in the onset of porpoising [5].
All the types had a prismatic aft body, which meant that the deadrise between midships and stern was kept constant. The relative weight or loading factor (Ap/∇2/3) and the longitudinal position of the center of gravity were modified in the series. It became clear that the deadrise angle was a significant factor in enhancing the seakeeping behavior of these fast-planing boats. However, a greater deadrise has a significant impact on the boat's calm water resistance [2]. In general, a greater deadrise means a higher resistance. To achieve an even better fit over the entire range of all the deadrise angles used in actual designs and in particular because of the fact that a considerable amount of hard chine planing hulls were designed around the 20°–25° of deadrise range, it was decided in 1996 that the Delft Systematic Deadrise Series (DSDS) database was to be extended along the original lines with a similar series but now with 19° of deadrise to better “fill the gap” between 12.5° and 25° of deadrise. The DSDS has been under development for decades by now and consists of a large family of systematically varied hard chine planing monohulls, based on the original research by Clement and Blount, which have all been tested in the same speed range, changing the same parameters and using the same experimental setup [6].
11.2 Methodology
Figure 11.1 shows the flowchart of the research. The project started as early as the previous hulls study including all the necessary data such as design parameters and guidelines requirement, as shown in Table 11.1. The study was initiated by generating a hull form using AutoCAD, based on a planing craft types from one of the Malaysia’s enforcement agencies, and then was developed further using Bentley MAXSURF Modeler. Three similar designs were produced with three variations of deadrise angles, i.e., 13°, 19°, and 25° as shown in Table 11.2. On completion of the hull model, the dynamic stability analysis is performed by using Bentley Stability software for all three designs. All parameters were calculated and analyzed in determining which design was dynamically unstable. The result and assessment of each design were based on Blount and Codega guidelines. Figure 11.2 shows the profile of the boat used in the study.

Project flowchart

Profile view of the 14 m custom boat
The hull lines that were developed using MAXSURF Modeler are shown in Fig. 11.3a–c.

a Lines plan of 14 m of custom boat with 13° forebody deadrise angle. b Lines plan of 14 m of custom boat with 19° forebody deadrise angle. c Lines plan of 14 m of custom boat with 25° forebody deadrise angle
-
i.
Development of Hull Form
Below are the three designs with different deadrise angles.
-
ii.
Hull Parameters and Hydrostatics Data
Three variations of hullform designs have been modeled by using the MAXSURF Modeler module as shown in Fig. 11.4a–c. The parameters and hydrostatics data from the models were used in the analysis of dynamic stability which included the waterplane area, m2 (Aw), volume displaced, m3 (∇), chine length, m (Lp), maximum breadth over chines, m (Bpx), projected area between chine and transom (Ap), and longitudinal center of projected area CAp.
Fig. 11.4 
a 3D model of 14 m of custom boat with 13° forebody deadrise angle. b 3D model of 14 m of custom boat with 19° forebody deadrise angle. c 3D model of 14 m of custom boat with 25° forebody deadrise angle

-
iii.
Longitudinal Center of Gravity Estimation
Estimating the longitudinal center of gravity (LCG) location of the boat was calculated by using the Bentley Stability module. Weight distribution and general arrangement drawing are among the essential references for the outcome. All the locations of tanks and compartments together with the loading and the locations of respective LCGs in static condition are shown in Fig. 11.5a, b. The location of compartments and tanks was shown in Fig. 11.6

a Compartment definition. b LCG position at equilibrium condition

Profile view after room definition and LCG location
11.3 Results and Discussion
Essential parameters were obtained from the MAXSURF Modeler and Stability modules such as projected area of planing bottom between the chine and transom, m2 (Ap), volume displaced at rest, m3 (∇), chine length, m (Lp), and maximum beam over chines, m (Bpx), hydrostatic data at DWL, position of longitudinal center of gravity, m (LCG) and centroid of planing area, m (CAp). Table 11.2 shows all the parameters taken for each of the various deadrise angles (β) of 13°, 19°, and 25°. The variation of deadrise angles led to different parameters except for the maximum beam value where the value was constant due to the characteristic of the design being changed only at the deadrise, but not at the beam. All these parameters were the main consideration and input for dynamic stability assessment (Table 11.3).
Once the required parameters have been collected, each value is used to calculate the loading coefficient, Ap/∇2/3, and length-to-beam ratio, Lp/Bpx, as shown in Table 11.4. These data were required for use in the transverse stability requirement suggested by Blount and Codega as explained earlier.
For the second guideline, the required parameters are the value of centroid of planing area (CAp), and longitudinal center of gravity (LCG). The parameters were gained in equilibrium condition calculation. Table 11.5 shows the parameter values collected for each design of deadrise angles. In compliance with the requirements proposed by Blount and Codega, (CAp-LCG)/Lp > 3%, the percentage difference between the centroid of planing area and longitudinal center of gravity divided by chine length must be more than 3%.
Table 11.6 is a summary of all calculated values for design 1, 13° of deadrise angle design and a comparison with the transverse stability guideline proposed by Blount and Codega. The percentage of (CAp-LCG)/Lp is 12.47%, more than 3% as required. The value of the loading coefficient is 9.57, more than 5.84 as calculated according to the guidelines given. Both requirements show the design of 13° deadrise angle for 14 m custom boat complied with the dynamic stability required by Blount and Codega criteria.
Referring to Table 11.7, for design 2 of 19° deadrise angle case, both dynamic stability requirements also met the criteria proposed by Blount and Codega. The percentage of (CAp-LCG)/Lp is 12.53%, more than 3% as required. The value of loading coefficient is 7.14, more than 5.87 as calculated according to the guidelines given.
Table 11.8 shows a summary of calculated values for design 3, 25° deadrise angle, and a comparison with the transverse stability guideline proposed by Blount and Codega. For this case, only percentage of (CAp-LCG)/Lp is complied, which is 10.51% more than 3% as required. The value of loading coefficient is 5.66, slightly less than 5.88 as required by the criteria.
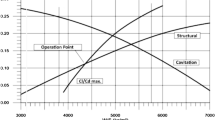
Figure 11.7 interprets the relationships between loading coefficients and percentage of difference between centroid of planing area and LCG divided by chine length. It seems reasonable to simplify that the hypothetical problem boats were more lightly loaded than Ap/∇2/3 = 5.8 and LCGs are more than 3% Lp aft of the centroid of Ap. The hull loading parameter has a small numerical value for a proportionally heavy boat. The proposed design criteria can be seen in Fig. 11.7 to include a bandwidth for margin and offered an engineering approach to avoid non-oscillatory instabilities.

Loading coefficient versus percentage of (CAp-LCG)/Lp
This study was limited to the collection and analysis of data contained in Fig. 11.7 where the design that has good characteristics of transverse stability will be in the same regions, while the design that does not show good transverse stability characteristics will be out of the region, i.e., outlier. Design 3 does not comply with the guideline as stated by Blount and Codega.
Furthermore, the criteria indicated that the curves of high Lp/Bpx hulls are more likely to have reverse slope/inflection points than low Lp/Bpx hulls.
Figure 11.8 shows the loading coefficient versus length-to-beam ratio. The graph can be formed from linear regression, (y = −36.13x + 131.6). The graph of design 3 did not show good transverse stability characteristics. The trend relates well with paper presented by [1].

Loading coefficient versus length–beam ratio
From a series of tests on planing hull, it is apparent that hull loading relative to hull dimension and LCG location has an important influenced on potential transverse instability. The development of the proposed design guideline necessitated a dimensionless hull loading parameter and a dimensionless LCG parameter, the two most frequently used hull loading parameters used in planing technology. For a planing boat having ratio of Ap/∇2/3 more than 5.8, the percentage of (CAp-LCG)/Lp should be more than 3%, both requirements must be complied in order to avoid dynamic transverse instability. The result of study also indicated that high Lp/Bpx hulls are more likely to have a reverse slope or inflection points which will likely exhibit instability than low Lp/Bpx. A simple guideline in order to avoid the region of saddle points is to ensure that Ap/∇2/3 > 0.39 (Lp/Bpx) + 4.52.
From the data obtained, some relationships can be concluded such as
-
1.
Different hull form characteristics generated different parameters, even with similar main dimensions. The higher the deadrise angle, the higher the value of projected area (Ap) of planing bottom and the chine length.
-
2.
The longer the chine length, the further the position of centroid of planing area and LCG move to forward of the boat.
-
3.
High length-to-beam ratio are more likely to have reverse slope or inflection points which will likely exhibit instability than low length-to-beam ratio.
-
4.
The higher the deadrise angle, the higher the potential for transverse instability.
-
5.
The change of parameters will affect the change in loading coefficient, and length–beam ratio which will affect the stability in terms of transverse stability according to the proposed guidelines by Blount and Codega.
-
6.
Moving the LCG forward to improve speed performance reduces running trim angle and thus brings the wetting of the forward curved buttocks into play leading to a situation in which suction can develop [7].
The effect of changing the deadrise angles design will provide a clear behavior change in terms of stability for a boat. This change in deadrise will affect the change of important parameters in the calculation of stability such as waterplane area, volume displaced, chine length, centroid of planing area, and longitudinal center of gravity. The higher the deadrise angle, the higher the parameter value that will be collected. Changes in these parameters will also affect the change in loading coefficient, and length–beam ratio which will affect the stability in terms of transverse stability according to the proposed guidelines by Blount and Codega.
11.4 Conclusion
Although the current stability criteria have taken into accounts the requirements for high-speed vessels, they are still solely based on the hydrostatic assessment. The result of the study also indicated that high Lp/Bpx hulls are more likely to have reverse slope or inflection points which will likely exhibit instability than low Lp/Bpx.
Design 3 exhibits unstable characteristics as chine position exhibits instability due to length–beam ratio is too high. The transverse instability is sensitive to LCG, i.e., trim of the vessel. The further forward the LCG the most likely for the vessel to exhibit transverse instability. This is due to the concavity of the hull plate as it progresses forward. Blount et al. discovered that in the course of their work that adding hull wedges forward may improve course keeping but will cause low dynamic hull pressures at the bow which are the source of the problem. Kazemi et al. found out that as the vessel speed increases the leading edge of the wetted surface moved forward due to decreasing in trim angle of the vessel.
This study had succeeded in showing that the guidelines proposed by previous researchers can be used. The need of small boat stability assessments to assure the safety and seaworthiness of its crews, passengers, cargo, and the boat itself cannot be overlooked.
It is recommendation that to prove the usability of the guideline, the time domain approach should be used since it will provide a wider and more conclusive assessment of the dynamic instability. The main advantage of the time domain simulation approach is that it allows the vessel's dynamic behavior to be obtained in a simulated environment in steps of time because dynamic stability can be known more accurately with the analysis related to speed and external forces.
-
Journal article
-
Hamburger, C.: Quasimonotonicity, regularity and duality for nonlinear systems of partial differential equations. Ann. Mat. Pura. Appl. 169, 321–354 (1995)
-
Journal article only by DOI
-
Sajti, C.L., Georgio, S., Khodorkovsky, V., Marine, W.: New nanohybrid materials for biophotonics. Appl. Phys. A (2007). https://doi.org/10.1007/s00339-007-4137-z
References
Samian Y, Malik AMA (2018) Static dynamic stability assessment of small craft. Department of Marine Technology, Faculty of Mechanical Engineering, Universiti Teknologi Malaysia
Blount DL, Codega LT (1992) Dynamic stability of planing boats. Mar Technol 29(1):4–12
Kazami H, Salari M (2017) Effects of loading conditions on hydrodynamics of a hard-chine planing vessel using CFD and a dynamic model. Int J Mar Technol 7:11–18
Clement EP, Blount DL (1963) Resistance tests of a systematic series of planing hull forms. SNAME Trans 71:491–579
Thornhill E, Veitch B, Bose N (2000) Dynamic instability of a high-speed planing boat model. Mar Technol 37(3):146–152
Keuning L, Hillege W (2017) The results of the delft systematic deadrise series. In: Proceedings of 14th international conference on fast sea transportation (FAST 2017): innovative materials, pp 97–106
Blount D.L. Schleicher D. M.: Correcting dynamic rolls instability. Profesional Boatbuilder. https://dlba-inc.com/wp-content/uploads/2020/07/Correcting-Dynamic-Roll-Instability.pdf. Accessed 24 Jun 2021
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Nuruddin, H., Razali, A.A., Mansor, M.N., Kamal, I.M. (2022). Influence of Deadrise on the Dynamic Instability of a 14 Meters Custom Boat in Regular Waves. In: Ismail, A., Dahalan, W.M., Öchsner, A. (eds) Design in Maritime Engineering. Advanced Structured Materials, vol 167. Springer, Cham. https://doi.org/10.1007/978-3-030-89988-2_11
Download citation
DOI: https://doi.org/10.1007/978-3-030-89988-2_11
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-89987-5
Online ISBN: 978-3-030-89988-2
eBook Packages: EngineeringEngineering (R0)