
Abstract
We study a robust adaptive nonparametric estimation problem for periodic functions observed in discrete fixed time moments with non-Gaussian Ornstein–Uhlenbeck noises. For this problem we develop a model selection method, based on the shrinkage (improved) weighted least squares estimates. We found constructive sufficient conditions for the observations frequency under which sharp oracle inequalities for the robust risks are obtained. Moreover, on the basis of the obtained oracle inequalities we establish for the proposed model selection procedures the robust efficiency property in adaptive setting. Then, we apply the constructed model selection procedures to estimation problems in Big Data models in continuous time. Finally, we provide Monte - Carlo simulations confirming the obtained theoretical results.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
- Nonparametric regression
- Non-Gaussian Ornstein–Uhlenbeck process
- Discrete observations
- Improved model selection method
- Sharp oracle inequality
- Asymptotic efficiency
1 Introduction
In this paper we consider the following nonparametric regression model in continuous time
where S is an unknown 1-periodic \(\mathbb {R}\rightarrow \mathbb {R}\) function from  , the duration of observations T is integer and
, the duration of observations T is integer and  is defined by a Ornstein – Uhlenbeck – Lévy defined as
is defined by a Ornstein – Uhlenbeck – Lévy defined as

Here  is a standard Brownian motion,
is a standard Brownian motion,  is a pure jump Lévy process defined through the stochastic integral with respect to the compensated jump measure \(\mu (\mathrm {d}s,\,\mathrm {d}x)\) with deterministic compensator \(\widetilde{\mu }(\mathrm {d}s\,\mathrm {d}x)=\mathrm {d}s\Pi (\mathrm {d}x)\), i.e.
is a pure jump Lévy process defined through the stochastic integral with respect to the compensated jump measure \(\mu (\mathrm {d}s,\,\mathrm {d}x)\) with deterministic compensator \(\widetilde{\mu }(\mathrm {d}s\,\mathrm {d}x)=\mathrm {d}s\Pi (\mathrm {d}x)\), i.e.

\(\Pi (\cdot )\) is the Lévy measure on  , (see, for example in [2]), such that
, (see, for example in [2]), such that

We assume that the unknown parameters \(a\le 0\),  and
and  are such that
are such that

Moreover, we assume that the bounds  , \(\underline{\varrho }\) and \(\varsigma ^{*}\) are functions of T, i.e.
, \(\underline{\varrho }\) and \(\varsigma ^{*}\) are functions of T, i.e.  ,
,  and
and  , for which for any \(\epsilon >0\)
, for which for any \(\epsilon >0\)

We denote by  the family of all distributions of process (1)–(2) on the Skorokhod space \(\mathbf{D}[0,n]\) satisfying the conditions (3)–(4). It should be noted that the process (2) is conditionally-Gaussian square integrated semimartingale with respect to
the family of all distributions of process (1)–(2) on the Skorokhod space \(\mathbf{D}[0,n]\) satisfying the conditions (3)–(4). It should be noted that the process (2) is conditionally-Gaussian square integrated semimartingale with respect to  which is generated by the jump process \((z_t)_{t\ge 0}\).
which is generated by the jump process \((z_t)_{t\ge 0}\).
The problem is to estimate the unknown function S in the model (1) on the basis of observations

where \(n=Tp\) and the observations frequency p is some fixed integer number. For this problem we use the quadratic risk, which for any estimate \(\widehat{S}\), is defined as

where  stands for the expectation with respect to the distribution
stands for the expectation with respect to the distribution  of the process (1) with a fixed distribution Q of the noise
of the process (1) with a fixed distribution Q of the noise  and a given function S. Moreover, in the case when the distribution Q is unknown we use also the robust risk
and a given function S. Moreover, in the case when the distribution Q is unknown we use also the robust risk

Note that if  is a Brownian motion, then we obtain the well known white noise model (see, for example, [7] and [13]). Later, to take into account the dependence structure in the papers [6] and [10] it was proposed to use the Ornstein – Uhlenbeck noise processes, so called color Gaussian noises. Then, to study the estimation problem for non-Gaussian observations (1) in the papers [9, 11] and [12] it was introduced impulse noises defined through the compound Poisson processes with unknown impulse distributions. However, compound Poisson processes can describe the impulse influence of only one fixed frequency and, therefore, such models are too restricted for practical applications. In this paper we consider more general pulse noises described by the Ornstein – Uhlenbeck – Lévy processes.
is a Brownian motion, then we obtain the well known white noise model (see, for example, [7] and [13]). Later, to take into account the dependence structure in the papers [6] and [10] it was proposed to use the Ornstein – Uhlenbeck noise processes, so called color Gaussian noises. Then, to study the estimation problem for non-Gaussian observations (1) in the papers [9, 11] and [12] it was introduced impulse noises defined through the compound Poisson processes with unknown impulse distributions. However, compound Poisson processes can describe the impulse influence of only one fixed frequency and, therefore, such models are too restricted for practical applications. In this paper we consider more general pulse noises described by the Ornstein – Uhlenbeck – Lévy processes.
Our main goal in this paper is to develop improved estimation methods for the incomplete observations, i.e. when the process (1) is available for observations only in the fixed time moments (5). To this end we propose adaptive model selection method based on the improved weighted least squares estimates. For nonparametric estimation problem such approach was proposed in [15] for Lévy regression model.
2 Improved Estimation Method
First, we chose the trigonometric basis  in
in  , i.e.
, i.e.  and for \(j\ge 2\)
and for \(j\ge 2\)

where [a] denotes the integer part of a. Note that if p is odd, then for any \(1\le i,j\le p\)

We use this basis to represent the function S on the lattice \(\mathcal{T}_p=\{t_1,...,t_p\}\) in the Fourier expansion form

The coefficients  can be estimated from the discrete data (5) as
can be estimated from the discrete data (5) as

We note that the system of the functions  is orthonormal in \(\mathbf{L}_2[0,1]\). Now we set weighted least squares estimates for S(t) as
is orthonormal in \(\mathbf{L}_2[0,1]\). Now we set weighted least squares estimates for S(t) as

with weights \(\gamma =(\gamma (j))_{1\le j\le p}\) from a finite set \(\varGamma \subset [0,\,1]^p\). Now for the weight coefficients we introduce the following size characteristics

where \(\#(\varGamma )\) is the number of the vectors \(\gamma \) in \(\varGamma \).
Definition 1
Function \(\mathbf{g}(T)\) is called slowly increasing as \(T\rightarrow \infty \), if for any \(\epsilon >0\)

 For any vector \(\gamma \in \varGamma \) there exists some fixed integer \(7\le d=d(\gamma )\le p\) such that their first d components are equal to one, i.e. \(\gamma (j)=1\) for \(1\le j\le d\) . Moreover, we assume that the parameters \(\nu \) and
For any vector \(\gamma \in \varGamma \) there exists some fixed integer \(7\le d=d(\gamma )\le p\) such that their first d components are equal to one, i.e. \(\gamma (j)=1\) for \(1\le j\le d\) . Moreover, we assume that the parameters \(\nu \) and  are functions of T, i.e. \(\nu =\nu (T)\) and
are functions of T, i.e. \(\nu =\nu (T)\) and  , and the functions \(\nu (T)\) and
, and the functions \(\nu (T)\) and  are slowly increasing as \(T\rightarrow \infty \).
are slowly increasing as \(T\rightarrow \infty \).
Using this condition, we define the shrinkage weighted least squares estimates for S

where

and the radius \(\mathbf{r}>0\) may be dependent of T, i.e.  as a slowly increasing function for \(T\rightarrow \infty \). To compare the estimates (10) and (11) we set
as a slowly increasing function for \(T\rightarrow \infty \). To compare the estimates (10) and (11) we set

Now we can compare the estimators (10) and (11) in mean square accuracy sense.
Theorem 1
Assume that the condition  holds with
holds with  . Then for any \(p\ge d\) and \(T\ge 3\)
. Then for any \(p\ge d\) and \(T\ge 3\)

Remark 1
The inequality (12) means that non-asymptotically, uniformly in \(p\ge d\) the estimate (11) outperforms in square accuracy the estimate (10). Such estimators are called improved. Note that firstly for parametric regression models in continuous time similar estimators were proposed in [14] and [12]. Later, for Lévy models in nonparametric setting these methods were developed in [15].
3 Adaptive Model Selection Procedure
To obtain a good estimate from the class (11), we have to choose a weight vector \(\gamma \in \varGamma \). The best way is to minimize the empirical squared error

with respect to \(\gamma \). Since this quantity depends on the unknown function S and, hence, depends on the unknown Fourier coefficients  , the weight coefficients
, the weight coefficients  cannot be found by minimizing one. Then, one needs to replace the corresponding terms by their estimators. For this change in the empirical squared error, one has to pay some penalty. Thus, one comes to the cost function of the form
cannot be found by minimizing one. Then, one needs to replace the corresponding terms by their estimators. For this change in the empirical squared error, one has to pay some penalty. Thus, one comes to the cost function of the form

Here \(\rho \) is some positive penalty coefficient,  is the penalty term is defined as
is the penalty term is defined as

where  is the estimate for the variance
is the estimate for the variance  which is chosen for \(\sqrt{T}\le p\le T\) in the following form
which is chosen for \(\sqrt{T}\le p\le T\) in the following form

The substituting the weight coefficients, minimizing the cost function (13), in (11) leads to the improved model selection procedure, i.e.

It will be noted that \(\gamma ^*\) exists because \(\varGamma \) is a finite set. If the minimizing sequence \(\gamma ^*\) is not unique, one can take any minimizer. Unlike Pinsker’s approach [16], here we do not use the regularity property of the unknown function to find the weights sequence \(\gamma ^*\), i.e. the procedure (15) is adaptive.
Now we study non-asymptotic property of the estimate (15). To this end we assume that
 The observation frequency p is a function of T, i.e. \(p = p(T)\) such that \(\sqrt{T} \le p \le T\) and for any \(\epsilon > 0\)
The observation frequency p is a function of T, i.e. \(p = p(T)\) such that \(\sqrt{T} \le p \le T\) and for any \(\epsilon > 0\)

First, we study the estimate (14).
Proposition 1
Assume that the conditions  and
and  hold and the unknown function S has the square integrated derivative \(\dot{S}\). Then for \(T\ge 3\) and \(\sqrt{T}<p\le T\)
hold and the unknown function S has the square integrated derivative \(\dot{S}\). Then for \(T\ge 3\) and \(\sqrt{T}<p\le T\)

where the term  is slowly increasing as \(T\rightarrow \infty \).
is slowly increasing as \(T\rightarrow \infty \).
Using this Proposition, we come to the following sharp oracle inequality for the robust risk of proposed improved model selection procedure.
Theorem 2
Assume that the conditions  –
–  hold and the function S has the square integrable derivative \(\dot{S}\). Then for any \(T\ge 3\) and \(0<\rho <1/2\) the robust risk (7) of estimate (15) satisfies the following sharp oracle inequality
hold and the function S has the square integrable derivative \(\dot{S}\). Then for any \(T\ge 3\) and \(0<\rho <1/2\) the robust risk (7) of estimate (15) satisfies the following sharp oracle inequality

where the rest term  is slowly increasing as \(T\rightarrow \infty \).
is slowly increasing as \(T\rightarrow \infty \).
We use the condition  to construct the special set \(\varGamma \) of weight vectors
to construct the special set \(\varGamma \) of weight vectors  as it is proposed in [4] and [5] for which we will study the asymptotic properties of the model selection procedure (15). For this we consider the following grid
as it is proposed in [4] and [5] for which we will study the asymptotic properties of the model selection procedure (15). For this we consider the following grid

where \(r_i=i\delta \), \(i=\overline{1,\,m}\) with \(m=[1/\delta ^2]\). We assume that the parameters \(\mathbf{k}\ge 1\) and \(0<\delta \le 1\) are functions of T, i.e.  and \(\delta =\delta (T)\), such that
and \(\delta =\delta (T)\), such that

for any \(\epsilon >0\). One can take, for example,

where  is a fixed constant.
is a fixed constant.
For  we define the weights
we define the weights  as
as

where  ,
,

Finally, we set

Remark 2
It should be noted, that in this case the condition  holds true with
holds true with  (see, for example, [15]). Therefore, the model selection procedure (15) with the coefficients (17) satisfies the oracle inequality obtained in Theorem 2.
(see, for example, [15]). Therefore, the model selection procedure (15) with the coefficients (17) satisfies the oracle inequality obtained in Theorem 2.
4 Asymptotic Efficiency
To study the efficiency properties we use the approach proposed by Pinsker in [16], i.e. we assume that the unknown function S belongs to the functional Sobolev ball  defined as
defined as

where \(\mathbf{r}>0\) and \(k\ge 1\) are some unknown parameters,  is the space of k times differentiable 1-periodic \(\mathbb {R}\rightarrow \mathbb {R}\) functions such that for any \(0\le i \le k-1\) the periodic boundary conditions are satisfied, i.e. \(f^{(i)}(0)=f^{(i)}(1)\). It should be noted that the ball
is the space of k times differentiable 1-periodic \(\mathbb {R}\rightarrow \mathbb {R}\) functions such that for any \(0\le i \le k-1\) the periodic boundary conditions are satisfied, i.e. \(f^{(i)}(0)=f^{(i)}(1)\). It should be noted that the ball  can be represented as an ellipse in \(\mathbb {R}^{\infty }\) through the Fourier representation in
can be represented as an ellipse in \(\mathbb {R}^{\infty }\) through the Fourier representation in  for S, i.e.
for S, i.e.

In this case we can represent the ball (18)

where  .
.
To compare the model selection procedure (15) with all possible estimation methods we denote by  the set of all estimators
the set of all estimators  based on the observations
based on the observations  . According to the Pinsker method, firstly one needs to find a lower bound for risks. To this end, we set
. According to the Pinsker method, firstly one needs to find a lower bound for risks. To this end, we set

Using this coefficient we obtain the following lower bound.
Theorem 3
The robust risks (7) are bounded from below as

where  .
.
Remark 3
The lower bound (21) is obtained on the basis of the Van - Trees inequality obtained in [15] for non-Gaussian Lévy processes.
To obtain the upper bound we need the following condition.
 The parameter \(\rho \) in the cost function (13) is a function of T , i.e. \(\rho = \rho (T)\) , such that
The parameter \(\rho \) in the cost function (13) is a function of T , i.e. \(\rho = \rho (T)\) , such that  and
and

for any \(\epsilon > 0\)
Theorem 4
Assume that the conditions  –
–  hold. Then the model selection procedure (15) constructed through the weights (17) has the following upper bound
hold. Then the model selection procedure (15) constructed through the weights (17) has the following upper bound

It is clear that these theorems imply the following efficient property.
Theorem 5
Assume that the conditions of Theorems 3 and 4 hold. Then the procedure (15) is asymptotically efficient, i.e.

and

Remark 4
Note that the parameter (20) defining the lower bound (21) is the well-known Pinsker constant, obtained in [16] for the model (1) with the Gaussian white noise process  . For general semimartingale models the lower bound is the same as for the white noise model, but generally the normalization coefficient is not the same. In this case the convergence rate is given by
. For general semimartingale models the lower bound is the same as for the white noise model, but generally the normalization coefficient is not the same. In this case the convergence rate is given by  while in the white noise model the convergence rate is \(\left( T\right) ^{-2k/(2k+1)}\). So, if the upper variance threshold
while in the white noise model the convergence rate is \(\left( T\right) ^{-2k/(2k+1)}\). So, if the upper variance threshold  tends to zero, the convergence rate is better than the classical one, if it tends to infinity, it is worse and, if it is a constant, the rate is the same.
tends to zero, the convergence rate is better than the classical one, if it tends to infinity, it is worse and, if it is a constant, the rate is the same.
Remark 5
It should be noted that the efficiency property (22) is shown for the procedure (15) without using the Sobolev regularity parameters \(\mathbf{r}\) and k, i.e. this procedure is efficient in adaptive setting.
5 Statistical Analysis for the Big Data Model
Now we apply our results for the high dimensional model (1), i.e. we consider this model with the parametric function

where the parameter dimension q more than number of observations given in (5), i.e. \(q>n\), the functions  are known and orthonormal in
are known and orthonormal in  . In this case we use the estimator (11) to estimate the vector of parameters
. In this case we use the estimator (11) to estimate the vector of parameters  as
as

Moreover, we use the model selection procedure (15) as

It is clear that

and

Therefore, Theorem 2 implies
Theorem 6
Assume that conditions  -
-  hold and the function (23) has the square integrable derivative \(\dot{S}\). Then for any \(T\ge 3\) and \(0<\rho <1/2\)
hold and the function (23) has the square integrable derivative \(\dot{S}\). Then for any \(T\ge 3\) and \(0<\rho <1/2\)

where the term  is slowly increasing as \(T\rightarrow \infty \).
is slowly increasing as \(T\rightarrow \infty \).
Theorems 3 and 4 imply the efficiency property for the estimate (24) based on the model selection procedure (15) constructed on the weight coefficients (17) and the penalty threshold satisfying the condition  ).
).
Theorem 7
Assume that the conditions  ) –
) –  ) hold. Then the estimate (24) is asymptotically efficient, i.e.
) hold. Then the estimate (24) is asymptotically efficient, i.e.

and

where  is the set of all possible estimators for the vector \(\beta \).
is the set of all possible estimators for the vector \(\beta \).
Remark 6
In the estimator (15) doesn’t use the dimension q in (23). Moreover, it can be equal to \(+\infty \). In this case it is impossible to use neither LASSO method nor Dantzig selector which are usually applied to similar models (see, for example, [17] and [1]). It should be emphasized also that the efficiency property (25) is shown without using any sparse conditions for the parameters  usually assumed for such problems (see, for example, [3]).
usually assumed for such problems (see, for example, [3]).
6 Monte-Carlo Simulations
In this section we give the results of numerical simulations to assess the performance and improvement of the proposed model selection procedure (15). We simulate the model (1) with 1-periodic functions S of the forms
and

on \([0,\,1]\) and the Ornstein – Uhlenbeck – Lévy noise process  is defined as
is defined as

where  is a homogeneous Poisson process of intensity \(\lambda =1\) and
is a homogeneous Poisson process of intensity \(\lambda =1\) and  is i.i.d. \(\mathcal{N}(0,\,1)\) sequence (see, for example, [11]). We use the model selection procedure (15) constructed through the weights (17) in which \(\mathbf{k}=100+\sqrt{\ln (T+1)}\),
is i.i.d. \(\mathcal{N}(0,\,1)\) sequence (see, for example, [11]). We use the model selection procedure (15) constructed through the weights (17) in which \(\mathbf{k}=100+\sqrt{\ln (T+1)}\),

and \(\varsigma ^*=0.5\) We define the empirical risk as

where  and
and  is the deviation for the l-th replication. In this example we take \(p=T/2\) and \(N = 1000\).
is the deviation for the l-th replication. In this example we take \(p=T/2\) and \(N = 1000\).
Tables 1 and 2 give the sample risks for the improved estimate (15) and the model selection procedure based on the weighted least squares estimates (10) from [11] for different observation period T. One can observe that the improvement increases as T increases for the both models (26) and (27).

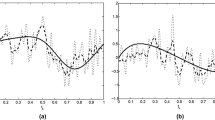
Behavior of the regression functions and their estimates for \(T=200\) (a) – for the function \(S_1\) and b) – for the function \(S_2\)).

Behavior of the regressions function and their estimates for \(T=500\) (a) – for the function \(S_1\) and b) – for the function \(S_2\)).

Behavior of the regression functions and their estimates for \(T=1000\) (a) – for the function \(S_1\) and b) – for the function \(S_2\)).

Behavior of the regression functions and their estimates for \(T=10000\) (a) – for the function \(S_1\) and b) – for the function \(S_2\)).
Remark 7
The figures show the behavior of the procedures (10) and (11) in the depending on the observation time T. The continuous lines are the functions (26) and (27), the dotted lines are the model selection procedures based on the least squares estimates \(\widehat{S}\) and the dashed lines are the improved model selection procedures \(S^*\). From the Table 2 for the same \(\gamma \) with various observations numbers T we can conclude that theoretical result on the improvement effect (12) is confirmed by the numerical simulations. Moreover, for the proposed shrinkage procedure, from the Table 1 and Figs. 1, 2, 3 and 4, one can be noted that the gain is significant for finite periods T.
7 Conclusion
In the conclusion we would like emphasized that in this paper we studied the following issues:
-
we considered the nonparametric estimation problem for continuous time regression model (1) with the noise defined by non-Gaussian Ornstein–Uhlenbeck process with unknown distribution under the condition that this process can be observed only in the fixed discrete time moments (5);
-
we proposed adaptive robust improved estimation method via model selection approach and we developed new analytical tools to provide the improvement effect for the non-asymptotic estimation accuracy. It turns out that in this case the accuracy improvement is much more significant than for parametric models, since according to the well-known James–Stein result [8] the accuracy improvement increases when dimension of the parameters increases. It should be noted, that for the parametric models this dimension is always fixed, while for the nonparametric models it tends to infinity, that is, it becomes arbitrarily large with an increase in the number of observations. Therefore, the gain from the application of improved methods is essentially increasing with respect to the parametric case;
-
we found constructive conditions for the observation frequency under which we shown sharp non-asymptotic oracle inequalities for the robust risks (7). Then, through the obtained oracle inequalities we provide the efficiency property for the developed model selection methods in adaptive setting, i.e. when the regularity of regression function is unknown;
-
we apply the developed model selection procedure to the estimation problem for the Big Data model in continuous time without using the parameter dimension and without assuming any sparse condition for the model parameters ;
-
finally, we give Monte - Carlo simulations which confirm the obtained theoretical results.
References
Candés, E., Tao, T.: The Dantzig selector: statistical estimation when \(p\) is much larger than \(n\). Ann. Stat. 35, 2313–2351 (2007). https://doi.org/10.1214/009053606000001523
Cont, R., Tankov, P.: Financial Modelling with Jump Processes. Chapman & Hall, London (2004)
Fan, J., Fan, Y., Barut, E.: Adaptive robust variable selection. Ann. Stat. 42, 321–351 (2014). https://doi.org/10.1214/13-AOS1191
Galtchouk, L., Pergamenshchikov, S.: Sharp non-asymptotic oracle inequalities for nonparametric heteroscedastic regression models. J. Nonparametr. Stat. 21, 1–18 (2009). https://doi.org/10.1080/10485250802504096
Galtchouk, L., Pergamenshchikov, S.: Adaptive asymptotically efficient estimation in heteroscedastic nonparametric regression. J. Korean Stat. Soc. 38, 305–322 (2009). https://doi.org/10.1016/J.JKSS.2008.12.001
Höpfner, R., Kutoyants, Y.A.: On LAN for parametrized continuous periodic signals in a time inhomogeneous diffusion. Stat. Decis. 27, 309–326 (2009)
Ibragimov, I.A., Khasminskii, R.Z.: Statistical Estimation: Asymptotic Theory. Springer, New York (1981). https://doi.org/10.1007/978-1-4899-0027-2
James, W., Stein, C.: Estimation with quadratic loss. In: Proceedings of the Fourth Berkeley Symposium Mathematics, Statistics and Probability, vol. 1, pp. 361–380. University of California Press (1961)
Kassam, S.A.: Signal Detection in Non-Gaussian Noise. Springer, New York (1988). https://doi.org/10.1007/978-1-4612-3834-8
Konev, V.V., Pergamenshchikov, S.M.: General model selection estimation of a periodic regression with a Gaussian noise. Ann. Inst. Stat. Math. 62, 1083–1111 (2010). https://doi.org/10.1007/s10463-008-0193-1
Konev, V.V., Pergamenshchikov, S.M.: Robust model selection for a semimartingale continuous time regression from discrete data. Stoch. Proc. Appl. 125, 294–326 (2015). https://doi.org/10.1016/j.spa.2014.08.003
Konev, V., Pergamenshchikov, S., Pchelintsev, E.: Estimation of a regression with the pulse type noise from discrete data. Theory Probab. Appl. 58, 442–457 (2014). https://doi.org/10.1137/s0040585x9798662x
Kutoyants, Y.A.: Identification of Dynamical Systems with Small Noise. Kluwer Academic Publishers Group, Berlin (1994)
Pchelintsev, E.: Improved estimation in a non-Gaussian parametric regression. Stat. Inference Stoch. Process. 16, 15–28 (2013). https://doi.org/10.1007/s11203-013-9075-0
Pchelintsev, E.A., Pchelintsev, V.A., Pergamenshchikov, S.M.: Improved robust model selection methods for a Lévy nonparametric regression in continuous time. J. Nonparametr. Stat. 31, 612–628 (2019). https://doi.org/10.1080/10485252.2019.1609672
Pinsker, M.S.: Optimal filtration of square integrable signals in Gaussian white noise. Probl. Transm. Inf. 17, 120–133 (1981)
Tibshirani, R.: Regression shrinkage and selection via the Lasso. J. R. Stat. Soc. Ser. B. 58, 267–288 (1996). https://doi.org/10.1111/J.2517-6161.1996.TB02080.X
Acknowledgments
This research was supported by RSF, project no. 20-61-47043.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Pchelintsev, E., Pergamenshchikov, S. (2021). Efficient Improved Estimation Method for Non-Gaussian Regression from Discrete Data. In: Shiryaev, A.N., Samouylov, K.E., Kozyrev, D.V. (eds) Recent Developments in Stochastic Methods and Applications. ICSM-5 2020. Springer Proceedings in Mathematics & Statistics, vol 371. Springer, Cham. https://doi.org/10.1007/978-3-030-83266-7_12
Download citation
DOI: https://doi.org/10.1007/978-3-030-83266-7_12
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-83265-0
Online ISBN: 978-3-030-83266-7
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)