
Abstract
An oscillator under the influence of high-frequency harmonic excitation with the amplitude and phase depending on the coordinate, velocity, and slow time is considered. Within the framework of the concept of vibrational mechanics, an equation is derived for the averaged motion of this system, containing an additional so-called vibrational force. In this case, a modification of the method of direct separation of motions is used that involves the introduction of a small parameter and considers the idea of two-scale decomposition. The resulting general formula for the vibrational force makes it possible to reveal some regularities connecting the original and averaged systems. Numerical verification of the method is performed for the example of a mechanical vibrator under the action of a high-frequency kinematic excitation with phase modulation.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
- Vibrational mechanics
- Amplitude modulation
- Phase modulation
- Method of direct separation of motion
- Averaged motion
1 Introduction
The concept of vibrational mechanics was proposed by Blekhman [1] and developed in a number of studies, a survey of which can be found, for example, in [1,2,3,4,5]. Vibrational mechanics, including the method of direct separation of motions, represents a compact and efficient calculation tool, which has been used in the development of many new vibrating machines and technologies [3].
It is known that for many processes and systems, such as, for example, the vibrational transportation of bulk material [1], the most interesting is averaged motion, and the details of high-frequency oscillations are not essential. Meanwhile, the high-frequency component in the excitation cannot generally be neglected, although it has a zero mean. How should such systems be analyzed? Of course, there is always the possibility of calculating the total motion, followed by averaging the result. However, such an approach is obviously uneconomic, since most of the information obtained in this way is unnecessary and discarded in the process of averaging.
Vibrational mechanics offers another way: replacing the original system with some system equivalent to the original one with respect to slow motions, the so-called averaged system. This results in a system that does not contain fast oscillating forces and simultaneously its motion coincides with the averaged motions of the original system. To obtain the averaged system, Blekhman proposed a method of direct separation of motion [1] and showed that, instead of the rapid excitation, the averaged system involves a certain additional slow force known as the vibrational force. This force is the price for hiding the fast motions. The appearance of a vibrational force leads to interesting and unexpected physical effects in averaged systems. Among them are Chelomei’s pendulum, the Stephenson–Kapitza pendulum, the Indian rope, vibrational transportation, and many other phenomena, a large collection of which are described in [1]. Thomsen [2] selected three groups of effects, stiffening, biasing, and smoothing, which appear in different systems with fast excitation, independent of their physical nature. Another direction of vibrational mechanics, along with the analysis of specific physical systems, is the analysis of the causes and the structure of vibrational forces for different classes of systems [4, 5]. Thus, in [4], a system with amplitude modulation of excitation is analyzed. The term “amplitude modulation” is used here, as in signal processing, for a variation of the amplitude: a sinusoidal high-frequency excitation has amplitude that depends on the coordinate, velocity, and slow time. As shown in this chapter, the nature of the dependence of the excitation amplitude on these quantities determines five different scenarios for the generation of a vibrational force:
-
the nonlinearity of the initial slow force with respect to velocity;
-
the dependence of the modulation amplitude on the coordinate;
-
the dependence of the modulation amplitude on the velocity;
-
the dependence of the modulation amplitude on the velocity and on the coordinate; and
-
the explicit dependence of the modulation amplitude on the slow time and on the velocity
These results were extended in [5] to the case of modulated stochastic excitation and applied to the problem of stochastic resonance.
The purpose of the present chapter is to further generalize these results and to extend them to the case of amplitude phase and in particular phase modulation, i.e., to the case of a high-frequency sinusoidal excitation with a variation of its phase in dependence on the coordinate, velocity, and slow time. This problem is of interest in connection with the search for new effective controlled vibro-exciters for vibrational technologies.
2 Vibrational Forces for a System with Amplitude and Phase Modulation
2.1 Formulation of Problem
A system with a modulated fast single-frequency excitation with equation
is considered. The force Θ has the following form
with θ = ωt, and ω ≫ 1. The continuous functions F, B and α of the coordinate x, velocity dx/dt, and slow time t are the “slow” force, the amplitude and the phase of the fast excitation, respectively. The variables are assumed to be normalized, so that the mass (or more generally the inertia matrix) is unity. The problem consists in finding the averaged system for the variable X = \( \frac{1}{2\pi }{\int}_0^{2\pi }x\ \mathrm{d}\theta \) in the form
In other words, the task is to find the vibrational force V.
2.2 The Formula for Vibrational Force
To determine the vibrational force, a method similar to that applied in [4] is used. This is a modification of the method of the direct separation of movements that involves the introduction of a small parameter 1/ω and some elements of a two-scale technique [6]. The solution to Eq. (1) can be presented as a superposition of the time-dependent mean value X and the fast oscillation ψ:
Following the method of direct separation of motions [1], we replace Eq. (1) by two integral-differential equations for X and ψ as follows:
with \( \frac{\mathrm{d}\psi }{\mathrm{d}t}=\dot{\psi}+\omega {\psi}^{\prime },\frac{{\mathrm{d}}^2\psi }{\mathrm{d}{t}^2}=\ddot{\psi}+2\omega {\dot{\psi}}^{\prime }+{\omega}^2{\psi}^{\prime \prime },\dot{f}=\frac{\partial f}{\partial t} \) and \( {f}^{\prime }=\frac{\partial f}{\partial \theta } \)
We search ψ as ψ(t, θ)= ξ(t, θ)/ω 2 and introduce Φ = B s sin (θ) + B c cos (θ) with B s = cos (α) and B c = sin (α). Then, Eq. (5) takes the form
In accordance with the method of the direct separation of motions, the averaged motion X and its derivatives are considered initially as given and the second equation (6) is solved with respect to ξ. This solution is obtained asymptotically as ξ = ξ 0 + ξ 1/ω with balancing the terms of the same order and integrating the corresponding equations related to θ. The integration constants are chosen such that ξ 0 and ξ 1 are periodical with respect to θ. In this case, the appropriate particular solution has the form
with
where
The obtained function ξ is substituted in the first equation (6). Calculation of the integrals in this equation and solving it with respect to \( \ddot{X} \) leads to the following final expression for the vibrational force
where the values H B, H α and H N are calculated with σ = ln B as follows
2.3 Analysis and Main Regularities
Analysis of Eqs. (3) and (4) allows us to identify the following regularities.
The vibrational force is proportional to the square of the excitation amplitude with the coefficient consisting of three terms H B, H α and H N which respond, respectively, to the amplitude modulation, to the phase modulation, and to a nonlinearity of the slow force F as a function of the velocity. In this case, the occurrence of a vibrational force is possible only if at least one of the following conditions is fulfilled:
-
The slow force F is a nonlinear function of velocity. This causes additional dissipative effects.
-
The amplitude modulation depends on the coordinate. In this case, the vibrational force is potential.
-
The amplitude modulation depends on speed. Only under this condition, the explicit dependence of the amplitude on the slow time can influence the vibrational force.
-
The phase modulation depends on velocity. Only under this condition, the explicit dependences of the phase on the slow time and coordinate can influence the vibrational force.
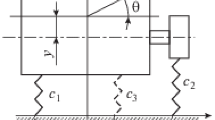
2.4 Example
Let us consider, as an example, a mechanical vibrator under the action of a high-frequency kinematic excitation with phase modulation described by Eq. (1) with
where the dimensionless parameters λ, D, γ and κ are obtained from the physical parameters by some scaling.
According to Eqs. (3), (8)–(11), the averaged system is a usual linear oscillator with a low-frequency harmonic excitation and a reduced mass
The amplitude of the low-frequency excitation A is equal to A = \( {\lambda}^4\kappa \gamma /\left(2{\omega}_0^2\chi \right) \).
The reduced mass 1/χ is calculated with the parameter \( \chi =1+{\lambda}^4{\kappa}^2/\left(2{\omega}_0^2\right) \).
The test simulations for the original (12) and for the averaged system (13) were fulfilled with the following values of the parameters: λ 2 = 0.98, D = 0.03, κ = 10, γ = 10 and ω = 8.
The high-frequency phase modulated excitation is presented in Fig. 1.

Phase excitation
The motion x(t) of the original (blue) and of the averaged (red) vibrator is shown in Fig. 2.

Coordinate run of the original (blue) and the averaged (red) vibrator
The coincidence of the results for the original and for the averaged system is good, even though the “small parameter” 1/ω = 0.125 is not very small.
The given example is of interest not only for verification of the proposed method but also in connection with the search for new effective controlled exciters for vibratory technologies.
3 Conclusions
For the first time, the formula for the vibrational force in the general case of the amplitude and phase modulation of excitation was obtained (Eq. 8). This formula shows that the vibration force consists of three components connected with the effect of the amplitude modulation, the effect of the nonlinearity of the slow forces, and the effect of the phase modulation. Unlike the first two effects, the effect of the phase modulation is considered for the first time. It was found that its occurrence is possible only if the excitation phase depends on the velocity. Only under this condition can the explicit dependences of the phase on the slow time and coordinate be detected in the vibrational force.
The verification of the results is performed using the example of a mechanical vibrator under the action of a high-frequency kinematic excitation with phase modulation. This example is of practical interest in connection with the vibratory technologies.
References
Blekhman, I.: Vibrational Mechanics: Nonlinear Dynamic Effects, General Approach, Applications. World Scientific, Singapore (2000)
Thomsen, J.: Slow high-frequency effects in mechanics: problems, solutions, potentials. Int. J. Bifurcation Chaos. 15, 2799–2818 (2005)
Blekhman, I., Vaisberg, L., Indeitsev, D.: Theoretical and experimental basis of advanced vibrational technologies. In: Vibration Problems ICOVP, pp. 133–138. Springer, Heidelberg (2011)
Kremer, E.: Slow motions in systems with fast modulated excitation. J. Sound Vib. 383, 295–308 (2016)
Kremer, E.: Low-frequency dynamics of systems with modulated high-frequency stochastic excitation. J. Sound Vib. 437, 422–436 (2018)
Nayfeh, A.H.: Perturbation Methods. Wiley, New York (2008)
Acknowledgments
The chapter’s study was carried out at the expense of the grant of the Russian Science Foundation No. 17-79-30056 (the project of the NPK “Mekhanobr-tekhnika”).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

Cite this paper
Kremer, E. (2020). Vibrational Mechanics of Systems with Amplitude and Phase Modulation of Excitation. In: Lacarbonara, W., Balachandran, B., Ma, J., Tenreiro Machado, J., Stepan, G. (eds) Nonlinear Dynamics of Structures, Systems and Devices. Springer, Cham. https://doi.org/10.1007/978-3-030-34713-0_4
Download citation
DOI: https://doi.org/10.1007/978-3-030-34713-0_4
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-34712-3
Online ISBN: 978-3-030-34713-0
eBook Packages: Physics and AstronomyPhysics and Astronomy (R0)