
Abstract—
The article presents the results from studying methods and means for reducing the transfer of vibration and pressure pulsations from power installations through elastic vibration isolators of pipelines carrying liquids (cooling water, condensate, or petroleum products) by suppressing the vibration forces and pulsations of the medium by active suppression systems. The results of studies into this subject carried out within the framework of the agreement between the Russian Scientific Foundation and the Tsiolkovskii Kaluga State University are reported. The article discusses the results from calculation and experimental studies aimed at determining the influence of liquid on the vibration-isolating performance of different kinds of pipeline compensators, including those based on bellows, sleeve-type ones made of rubber cord materials, those based on rubber cord shells, and compensators of a new type containing elastic inserts made using thin-layered rubber-metal elements with the minimal interaction between the structure and working medium. The investigations were carried out with the aim to minimize the transfer of vibration through the compensator by improving its design. The results from experimental studies into the effectiveness of joint suppression of the vibration and pressure pulsations by active methods for reducing the transfer of vibration from power installations to the foundation by means of pipeline compensators are presented. It is shown both analytically and experimentally that there is a frequency band in which the vibration forces transferred through the compensator structure are suppressed by the forces from pressure pulsations. The transfer of vibration becomes a factor of ten or more less than it is in the compensator tested without liquid. A physical explanation for this phenomenon is given, and ways of using it in practice are suggested. A two-channel active vibration protection system with a digital control device containing controllers in the form of standard Butterworth, Chebyshev, and band-pass filters, as well as resonance sections in its feedback circuit, is experimentally studied. With the active joint wide-band suppression of vibration forces and pressure pulsations determining the transfer of vibration through the compensators of pipelines with liquid, the effectiveness was found to be up to 32 dB in the frequency band from 10 to 350 Hz.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
The modern industry constructing power machinery and equipment faces growing requirements for decreasing the transfer of vibration from operating installations to the foundation and environment [1]. The extent to which vibration of an installation itself can be decreased is limited by the achieved level of technologies, by physical processes, overall dimensions and weight, and cost considerations. The propagation of vibration and noise into the environment can be decreased by using vibration-isolation methods. Article [1] describes the results from our developments of modern, high-efficient vibration-isolation means that use both the structure of pipelines and the working medium carried by them. It is pointed out that the recent decades have witnessed development of active methods for suppressing noise and vibration both in their source and along their propagation paths, with making references to the extensive studied literature on these methods and to the results obtained from investigations of active vibration suppression methods and also dynamic forces, air noise, and liquid pulsations in pipelines.
The vibration force transferred to the foundation is proposed to be used as the vibration-transfer criterion [1]. Without taking into account the foundation stiffness, which is essentially higher than that of the vibration isolator, the force amplitude is equal to the product of vibration amplitude at the place in which the vibration isolator is attached to the installation by the modulus of its transient vibration stiffness С(f). Accordingly, С(f) is defined as the ratio of the vibration force transmitted to the foundation at the vibration isolator fixed outlet to the vibration at its inlet at the frequency f and is a complex quantity [2]. For comparing different vibration isolators, it is convenient to compare the С(f) modulus values in the frequency band of interest [1, 3, 4].
It is pointed out in [1] that, with a growth of deformation frequency, the experimentally measured transient vibration stiffness can increase by a few orders of magnitude with respect to the static stiffness in a wide frequency band for almost all vibration-isolating compensators of liquid-carrying pipelines. In view of this circumstance, the transfer of vibration forces via pipelines can be one, two, or even more orders of magnitude higher than the similar parameters of support vibration isolation. If the compensator contains liquid, this may also result in that the transient vibration stiffness becomes one or two orders of magnitude higher in comparison with its structural component (without liquid).
Our search in the literature has not revealed—except for the activities carried out within the framework of this study—any data on studying the interaction between the pulsations of medium and vibration in the compensators and on reducing the transfer of vibration and pressure pulsations through the compensators of liquid-carrying pipelines using passive and active methods. In some cases, the transfer of vibration from power installations via pipelines can be several orders of magnitude higher than via the support structures. This must be taken into account in designing the vibration isolation of power equipment from its foundation and from the environment along the route of water-carrying pipelines in the industries constructing power and transport machinery and equipment, in the shipbuilding industry, and also in designing the petroleum and gas pipelines at pumping stations. For reducing the transfer of vibration via a pipeline by means of vibration-isolating compensators, it is necessary to decrease their structural stiffness and reduce the forces produced by pulsations of working medium pressure inside the compensator in a wide frequency band using structural or active methods.
At present, there are hardly any activities on studying the transfer of vibration and pressure pulsations through the compensators of liquid-carrying pipelines; there are no relevant physical and analysis models that would describe the growth of vibration transfer through them with the compensator deformation frequency f, nor are there any activities on developing means and methods for active suppression of pressure pulsations and dynamic forces transmitted through such compensators. Below, the results of the work performed by the authors on this subject within the framework of the agreement between the Russian Scientific Foundation and Tsiolkovskii Kazan State University are presented.
CHARACTERISTICS OF PIPELINE COMPENSATORS
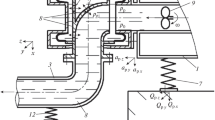
Figure 1a shows the schematic diagram of the installation and the vibration deformation for the straight bellows-type compensator not balanced with respect to inner static pressure. The thrust forces between the connection flanges occurring in unbalanced, high-pressure large-diameter compensators can reach several thousand kilonewton, which is unacceptable. In practice, balanced compensators are normally used. Such compensators are free from such forces because these forces are structurally closed to the strength components inside the compensator. Figure 1b shows the schematic design of an angular balanced compensator made on the basis of diaphragm-type rubber cord shells (RCS) 10, which is installed between pump 1 and pipeline 3. The arrows show the working liquid’s flow direction in the pipeline and the liquid’s overflow direction between the cavities in the compensator. The thrust forces close to the compensator’s inner casing 11 (connected with the pipeline) and to its outer casing 4 (connected with the pump). Two RCSs 10 serve to ensure tightness, displacements, and vibration isolation.

Schematic diagram of the installation and vibration deformation of a (a) straight, non-balanced bellows-type compensator and a (b) balanced angular compensator with an RCS between the pump and pressure pipeline. 1—Pump; 2—pump delivery pipe; 3—system pipeline; 4—pressure pipeline compensator; 5—pipeline support; 6—foundation; 7—shock absorbing (pump support vibration isolation); 8—working medium (water); 9—pump runner; 10—RCS; 11—inner casing; р0 denotes static pressure downstream of the pump; pp denotes pressure pulsations from the pump; pc denotes pressure pulsations from the compensator vibration deformation; i = x, y, and z are coordinate axes; Qpi denotes vibration forces acting on the foundation through the pump shock absorber; Qti denotes vibration forces from the pipeline downstream of the compensator that act on the foundation; Ω is the pump runner angular rotation frequency; arrows show overflow of liquid between the compensator cavities.
Figure 2a shows the angular and straight balanced compensators made using bellows that are commercially available from AO Kompensator in St. Petersburg. Figure 2b schematically shows the axial deformation of the straight balanced bellows-type compensator. The arrows show the overflow of water between the cavities of the large and small bellows at the movable flange axial displacement δ.

(a) Angular (on the left) and straight (on the right) balanced compensators made using bellows and (b) axial deformation scheme of a straight balanced bellows-type compensator. δ is the axial displacement of the movable flange; S is the cross-section area of small (extreme) bellows, and 2S is the area of the large (middle) bellows. 1—Pump movable pipeline; 2—small bellows; 3—large bellows; 4—rigid bilateral braces; 5—fixed pipeline; 6—working medium (water). Arrows show overflow of liquid between the compensator cavities.
An analysis of balanced compensators' deformation schemes shows (see, e.g., Figs. 1b, 2b) that the thrust force from the inner static pressure р0 between the flanges is equal to zero. During the mutual displacement of the flanges, the compensator’s total inner volume remains constant. The results of experiments reported in [1–4] show that such compensators feature significant transient vibration stiffness and produce working medium pressure pulsations during their vibration deformation as part of the pipeline. With a growth of frequency, the increase of vibration stiffness with respect to static stiffness can be as much as a few orders of magnitude for all types of liquid-containing compensators. If a compensator contains liquid, its vibration stiffness may become noticeably higher, which is due to interaction between the liquid and compensator structure during their vibration. Figure 3 shows the effect that the deformation frequency f and the presence of water have on the experimentally determined axial transient stiffness С of the angular balanced compensator equipped with a diaphragm-type RCS 250 mm in diameter shown in Fig. 1b. With the growth of frequency, the stiffness increases by three orders of magnitude. With the presence of water, total stiffness 1 increases by almost two orders of magnitude in comparison with structural stiffness 2 in a wide frequency band up to 650 Hz.

Transient vibration stiffness С(f) of angular balanced compensator 4 250 mm in diameter with diaphragm-type RCS 10 shown in Fig. 1b with (1) water and (2) air in the axial direction z.
Figure 4a shows a straight balanced compensator with a diaphragm-type RCS 750 mm in diameter, and Fig. 4b shows its transient vibration stiffness in the axial direction when the compensator contains (I) water and (II) air. The growth of total vibration stiffness 1 for the compensator with water is four orders of magnitude in comparison with the static stiffness (see Fig. 4b) in the frequency band from 20 to 120 Hz and higher. The availability of water results in that the vibration stiffness in this frequency band is two orders of magnitude higher in comparison with structural stiffness 2.

(a) Straight balanced compensator with a diaphragm-type RCS 750 mm in diameter and (b) its transient vibration stiffness С(f) in the axial direction with (I) water and (II) air. 1–3—Diaphragm-type rubber cord shells; 4—rigid ties; 5—inlet pipeline; 6—outlet pipelines; 7—working fluid (water). Arrows show overflow of liquid between the compensator cavities.
For comparison, Fig. 5 shows the experimentally determined transient vibration stiffness of a pneumatic vibration isolator for the rated load equal to 2000 kN. This stiffness varies only slightly at least up to 200 Hz. The compensator with water shown in Fig. 4 has an essentially higher stiffness at frequencies 50–100 Hz.

Stiffness of the RCS-based pneumatic vibroisolator versus the disturbance frequency under static loads equal to (1) 2000 kN and (2) 2500 kN.
The investigations of compensators up to 750 mm in diameter made on the basis of RCSs, bellows, and rubber cord sleeves have shown that the influence of water in them is inversely proportional to structural stiffness. Hence, attempts to decrease the structural stiffness do not help reduce the transfer of vibration, which is determined by pressure pulsations. The compensator turns to be a powerful source of pressure pulsations and vibration forces.
PHYSICAL AND ANALYTICAL VIBRATION DEFORMATION MODELS OF COMPENSATORS CONTAINING LIQUID
Vibration and vibration forces can be transmitted through the compensators of pipelines with liquid in the following ways:
(1) via the structure of the compensator and its elastic components;
(2) through pressure pulsations pp (see Fig. 1) that are already available at the compensator inlet (e.g., from the running pump), which act on the walls of the compensator and of the pipeline behind of it;
(3) through the dynamic forces that occur during vibration deformation of elastic components due to oscillatory change of their areas under the effect of the inner static pressure р0 in the compensator (see Fig. 1); and
(4) through the occurrence of pressure pulsations pc (see Fig. 1) in the compensator itself during its vibration deformation as part of the pipeline.
Below, the physical models for the last case are considered.
In a statically balanced compensator, a static thrust force between the connection flanges due to inner pressure does not occur and forces, if any, close inside the compensator structure. In designing such compensators, measures are usually taken to ensure the required mutual static displacements of the flanges as well as strength, static stiffness, and balancing with respect to static pressure. When mutual displacements of the flanges occur in a balanced compensator containing incompressible liquid (water) and with the installed plugs, no changes take place in the total inner volume and static pressure. It can be seen from Figs. 1, 2, and 4 that balanced compensators have rather complex designs. They have local cavities inside of them, the volumes of which change during deformation. The possible arrangements for axial and transverse deformation and for the motion of working fluid in them in different designs of compensators are analyzed in detail in [4].
According to the analysis carried out in [4], deformation is accompanied by the overflow of working medium between the inner local volumes with the compensator’s total volume remaining unchanged. The larger the movable mass of liquid and the higher its acceleration, the higher the pressure pulsations that occur. In acting on the compensator and pipeline inner surfaces, the pressure pulsations produce dynamic forces transmitted to the pipeline and foundation. The combined numerical and experimental analysis of the pulsations occurring in such compensators that was carried out in [4] was aimed at revealing clear, simple for calculation, and structurally controllable physical models describing the occurrence of pulsations, which is required for obtaining the analysis dependences and for estimating the significance of all these models in each particular case. This is necessary in elaborating measures aimed at reducing pressure pulsations and the dynamic forces generated by them, which are transmitted by the compensators.
The available literature sources do not contain information on the development of such models and their analysis schemes nor do they contain information on determining why the vibration stiffness of compensators containing water shows an essential growth with frequency. In [2], a dependence of experimentally obtained transient vibration stiffness values of compensators on frequency is only pointed out, and methods for experimentally determining them are given. In accordance with [2], the complex frequency-dependent matrix that describes the transfer of forces and pulsations through the compensator has the dimension 13 × 13. The entries of such a matrix can be determined experimentally; however, it is not clear which of them should and in what way be modified to reduce the transfer of vibration through the compensator at the specified frequency. Therefore, it is necessary to develop physically clear models that would describe the occurrence of working medium pressure pulsations and dynamic forces transmitted by compensators in undergoing vibration deformation. Based on an analysis of the vibration deformation of the existing compensators designs [4], we have developed the following models describing the occurrence of pressure pulsations in their cavities excited by vibration displacement of the flanges.
Model 1. The pressure pulsations are solely determined by the vibration of the compensator (or the pipeline) as a rigid body moving together with the liquid.
Model 2. The pressure pulsations are determined by the local changes of volumes in individual sections or cavities of the compensator (bellows corrugations or RCS cavities) when it undergoes vibration deformation; as a result, the following two excitation models can be identified:
(1) model 2a, which describes the overflow of liquid between the compensator’s local inner volumes, and
(2) model 2b, which describes the displacement of liquid from the slit when a change occurs in the local volume.
In deriving analytical relations for calculating the distribution of pressure pulsations, the vibration forces occurring in the compensators, and the compensator’s transient vibration, certain assumptions were taken in [4] based on the above-mentioned models and taking into account the design parameters and vibration frequency and amplitude. Under field conditions, the forces acting from a pump on the compensator’s inlet (movable) flange are not known. The kinematic excitation of the compensator inlet flange, with the outlet flange assumed to be fixed, is considered. According to safety considerations, the maximum permissible vibration velocity of power equipment by its general level in the frequency band 10–1000 Hz during operation is limited to 11 mm/s (and up to 4 mm/s for normal operation). This corresponds to the vibration amplitude A = 0.2 mm at the 10 Hz frequency. Since the vibration amplitude decreases with increasing the frequency and the characteristic gaps in the compensators are larger than 1 mm, the maximal vibration amplitude is essentially smaller than the characteristic gaps and characteristic linear sizes of the compensator, due to which the problem can be solved in its linear statement. In view of this circumstance, it is possible to neglect the working fluid viscosity during overflow because, at a velocity of up to 11 mm/s, the Reynolds number and the friction forces are small.
The compensator (pipeline) walls are absolutely rigid. The elastic components (the RCS and bellows corrugations) ensure the required displacements but they are inextensible; that is, in changing the static pressure р0 inside the compensator, the volume of the cavities formed by these components remains unchanged. The static and vibration stiffness of the elastic components in the displacement direction can also be neglected (it can be taken equal to zero) assuming that the transmitted forces are solely determined by pulsations (there is no structural stiffness).
COMPENSATOR STIFFNESS VALUES EVALUATED USING THE DEVELOPED MODELS
In [4], analytical relations for the developed physical models were derived, computations were carried out, and the calculation results were compared with the results of experiments carried out on specially fabricated benches and models. The calculations were carried out for the water density ρ = 998 kg/m3 and the experimentally measured sound velocity in the bench pipe water equal to 1250 m/s.
For model 2a, the pressure pulsations occurring in water at different points over the length of a 1 m long pipeline 100 mm in diameter were measured in the experiment. For comparison, Fig. 6 shows the calculated and experimental pressure pulsation spectra at a distance of 0.875 m from the pipe bottom. Good agreement between the calculated values (obtained with (α = 0.06 m–1) and without (α = 0) taking into account the wave attenuation in water) and measurements to a frequency of around 1600 Hz serves as confirmation of the validity of the analytical formulas.

Comparison of calculated and experimental pressure pulsation spectra for model 2a in a 100-mm diameter pipe with a bellows-type compensator at the distance х = 0.875 mm from the pipe’s bottom.
For model 2b, the experiment and calculations were carried out in the frequency band 0–1600 Hz in a tube with the diameter Dt = 0.08 m filled with water to the height Н = 0.069 m. The piston had the diameter Dp = 0.05 m and height hp = 0.005 m. Good agreement between the calculated and experimental spectra of the transient vibration stiffness to frequencies of 600–1000 Hz was obtained (Fig. 7).

Comparison of the calculated and measured vibration stiffness values for model 2b with a 50-mm slit diameter and 1-mm gap in a 80-mm diameter pipe.
It is shown in [4] that the following expression is valid for the transient vibration stiffness of a liquid-containing compensator С(f) for all three models:
where Qz is the force at the compensator outlet, A is the vibration amplitude at its inlet, ω is the angular vibration frequency of the compensator flanges, ρ is the liquid density, and kgeom is a coefficient that depends only on the compensator geometrical parameters.
It follows from expression (1) that the transient vibration stiffness С(f) caused by pressure pulsations in the compensator due to its vibration deformation is proportional to the working fluid density and the square of the deformation frequency. The latter can serve as a diagnostic sign indicating that it is particularly this stiffness model that predominates in carrying out the experiment.
The use of the considered models made it possible to construct analytical relations for calculating the pressure pulsations, vibration forces, and transient vibration stiffness of different compensators. The calculated and experimental data shown in Fig. 8 for the balanced angular compensator on the basis of bellows (see Fig. 2) can be regarded to be in good agreement with each other to frequencies of about 650 Hz.

Comparison of the (1) calculated and (2) experimental values of the axial vibration stiffness С(f) of the angular water-containing a 100-mm diameter compensator (see Fig. 2a).
COMPENSATION OF STRUCTURAL FORCES BY PRESSURE PULSATIONS
Compensators made on the basis of bellows, sleeves, rubber-cord shells, and thin-layered rubber–metal elements (TRMEs) were studied experimentally and analyzed numerically [1, 5]. For all designs, it has been found that the vibration stiffness decreases (dips) noticeably in comparison with the structural component in quite a wide frequency band owing to the availability of water in the compensator. For the angular compensator (see Figs. 2, 8) equipped with bellows 100 mm in diameter, a dip is observed at frequencies from 50 to 150 Hz (Fig. 9). The maximal decrease in the total stiffness by a factor of 100 in comparison with the structural stiffness occurs at a 110 Hz frequency. At frequencies above the dip frequency, the availability of water in the compensator results in that the vibration stiffness becomes higher in comparison with the structural component.

Influence of water on the axial vibration stiffness С(f) of a 100-mm diameter angular compensator (see Fig. 2a). 1—With air (structural stiffness); 2—with water.
The following findings have been obtained from the calculation and experimental investigations of the factors causing the dip in the dependence С(f). The structural component of the total force resulting from the deformation of the compensator’s elastic components acts in phase with the displacement A(f) of its inlet (movable) flange. It is shown in [3, 4] that pulsations of pressure р occur in phase with the flange acceleration and in phase opposition with the flange displacement A(f). Therefore, the forces caused by pressure pulsations and the forces transmitted by the structure are subtracted from each other. According to expression (1), the forces caused by pulsation increase with the square of frequency. At the central frequency corresponding to the maximal dip, both of these forces mutually compensate each other to yield the minimal values of the resulting force and transient vibration stiffness С(f). At frequencies below the dip central frequency, the phase shift between the total force and the flange vibration is equal to zero and is determined by the transfer of vibration through the structure. At frequencies above the dip frequency, the phase shift changes by 180° and is determined by the liquid pulsations.
The accomplished studies have revealed the design measures using which the compensator’s transient vibration stiffness can be minimized at the specified frequency in the low-frequency band. This may be the rotation frequency of the pump or compressor blades. One of ways in which the dip frequency can be adjusted is to change the compensator’s structural stiffness: the higher this stiffness, the higher the dip frequency is. This frequency can also be adjusted by changing the oscillating liquid column height in the compensator, e.g., by changing the length of the section between the bellows (see Fig. 2a). The longer this section, the lower the dip frequency is. The use of this method does not affect the compensator’s static stiffness.
DECREASING THE TRANSIENT STIFFNESS OF COMPENSATORS PROCEEDING FROM THE DEVELOPED MODELS
The obtained models describing the occurrence of pressure pulsations were analyzed for their significance in regard of the transient vibration stiffness produced in different compensators, and it has been shown from that analysis that, in some cases, model 2b may have the greatest influence on the indicator С(f) when pressure pulsations emerge in slits having a large area and small height. Figure 10a shows the compensator made using a 750-mm diameter TRME, in which the occurrence of pulsations according to models 2a and 2b is ruled out completely owing to the design features. For comparison, Fig. 10b shows the curves of the transient vibration stiffness of the compensator with a TRME (see Fig. 10a) and of the compensator with an RCS (see Fig. 4a), which contains water-filled slits having a large diameter and small height. Owing to the exclusion of slits from the structure, the stiffness has been greatly—by a factor of ten to 100—decreased in the frequency band to 150 Hz.

Influence of pressure pulsation excitation model 2b on the axial vibration stiffness С(f). (a) Compensator with a TRME with the excluded model 2b and (b) comparison of transient vibration stiffness values of 750-mm diameter water-containing compensators at the same pressure: 1—with a TRME (see Fig. 10a); 2—with an RCS (see Fig. 4a).
RESULTS FROM STUDYING ACTIVE VIBRATION-PROTECTION SYSTEMS
In practice, the effectiveness of the known passive design methods for reducing the dynamic forces and pulsations in compensators is limited by the strength and overall dimensions of the installations and compensators and by the physical characteristics of the working processes occurring in them. The vibration intensity transferred through the compensators can be decreased by using active vibration protection systems (AVPSs) [1, 4, 6], which produce vibration effects compensating the initial vibration produced by the installation during its operation. These may be vibration forces acting on the structures connected to the installation in phase opposition to the forces acting from the installation. The AVPSs for suppressing pressure pulsations behave in a similar way: they can reduce both discrete components in the vibration spectra and random vibrations in a frequency band. Active systems can also be used for decreasing the vibration of the installation itself. Our search of the literature has not revealed any publications on decreasing the transfer of vibration through compensators of pipelines with liquid by means of active methods. In what follows, the results from testing the AVPS we have developed for suppressing vibration forces and pressure pulsations in liquid-containing compensators are considered. The bench of a two-channel AVPS on which the investigations were carried out is shown in Fig. 11.

Bench of a two-channel AVPS. CD is a control device, PA is a power amplifier, V is a vibrator, SG is a signal generator, and SA is a signal analyzer. The subscripts denote the following: c is for compensation, p is for pressure pulsations, and v is for vibration. 1—Plate; 2—vibration force sensors; 3—foundation; 4—pipe; 5—compensator; 6—piston; 7—hydrophones; 8—piezoceramic radiator.
Plate 1 is installed on vibration force sensors 2 resting on foundation 3. Compensator 5 with pipe 4 and water is mounted on plate 1. Pulsations of pressure р in the pipe and compensator are produced by piston 6 and are measured by means of hydrophones 7. Piston 6 is excited by electrodynamic vibrator Vp with power amplifier PAp. Pulsations of pressure р produce the dynamic force Fp, which excite vibration of plate 1. Vibration is structurally excited by vibrator Vv with power amplifier PAv, which produce the vibration force Fv acting on plate 1 through the compensator. A random or sine-wave signal with the specified frequency is applied to the power amplifiers from the signal generator SG. The total force Q with which the vibration of plate 1 acts on foundation 3 is measured by means of force sensors 2.
Vibrator Vc jointly with power amplifier PAqc produce compensating force Fc, which decreases force Q measured by sensor 2. The signal for PAqc and Vc is generated by multichannel control system CD through processing signal Q from the force sensors. All vibrators are vibroisolated from plate 1 and foundation 3 by means of an elastic suspension with a natural frequency of lower than 1 Hz. Piezoceramic radiator 8 jointly with power amplifier PApс produce compensating pressure pulsations. The signal for radiator 8 is generated by control system CD through processing the signal from hydrophone 7.
The signal of the feedback sensor, force sensor 2, or hydrophone 7 is applied to one of the control system CD analog-to-digital converter’s inputs. This signal is digitized and transmitted to the CD system’s processor module, in which a narrow- or wide-band compensating signal is produced using a digital controller. This signal is then directed to the relevant power amplifier through a digital-to-analog converter.
The possibility of constructing an efficient controller in the feedback circuit on the basis of standard band-pass filters of different orders: the Butterworth filters, Chebyshev filters, elliptical filters, and resonance links (resonators) was studied. The control device parameters were specified from a computer in the MATLAB environment through the RS-485 interface. The signals were monitored and processed by the Puls-type multichannel signal analyzer SA produced by Brüel & Kjær (Denmark).
The characteristics of the controller (filter) and the feedback circuit gain were selected so as to maximally suppress vibration without the loss of system stability. It has been found from the study results that a controller able to effectively suppress dynamic forces and pressure pulsations in a wide frequency band can be constructed on the basis of first- and second-order band-pass filters. For making the AVPS more stable and efficient, the wide-band filters were supplemented with resonators with damping at the resonance frequencies that determined the system stability (an intense growth of vibration amplitudes at these frequencies was observed with increasing the feedback circuit gain as the stability boundary was approached). The results of suppressing the forces Q under the plate by the active method using a resonator with the central frequency equal to 120 Hz are shown in Fig. 12a. The force suppression ratio at the 120 Hz frequency reaches 32 dB. The width of the band in which the force Q decreases by a factor of two or more is from 80 to 150 Hz.

Results of active damping on the AVPS bench (see Fig. 11). (a) Active damping of dynamic forces by the resonator at a 120-Hz frequency; (b) damping of the force by first-order elliptical filters in the 30–70-Hz band, by second-order filters in the 50–120-Hz band, and by two resonators at 130 and 160 Hz; (c) joint damping of pulsations p and force Q at a 310-Hz frequency by a 335-Hz resonator in the p channel with the phase π/2. 1—Initial signal; 2—damping; 3—interference.
Figure 12b shows the results from wideband damping of forces Q under the plate using five elliptical filters and a resonator at the 145 Hz frequency. It can be seen that the vibration force damping ratio reaches 16 dB, and the damping band width Δf makes almost five octaves: from 10 to 280 Hz. At frequencies below and above the active damping band, negative effectiveness zones appear. These zones occur because the filter inverses the signal phase at the boundaries of its operation, as a result of which it amplifies the initial signal instead of damping it. In the case of using active damping, the signals from interference 3, which go from the foundation at the frequencies equal to 20–40, 50, 78, 100, and 150 Hz, are also suppressed.
The Butterworth and Chebyshev filters have demonstrated a somewhat less efficient behavior. Numerous tests carried out with different versions of filters of higher orders have shown that these filters are less efficient in comparison with the proposed filters.
Figure 12c shows the results of damping the pulsations р at the resonance frequency equal to 310 Hz by means of a 335 Hz resonator in the channel of pulsations with the phase equal to π/2. The signal at the resonance has been damped by a factor of 20 (26 dB) both for pulsations and force. It should be noted that with simultaneous excitation and active damping of forces and pulsations, both damping channels operate successfully having almost no influence on each other.
CONCLUSIONS
(1) The possibility to decrease the transfer of vibration through liquid-containing compensators installed on pipelines, also with the use of active methods, has hardly been studied to the present at all, although the solution of this problem is very important for vibration-isolation purposes of equipment along the pipeline route in the industries constructing power machinery and equipment, transport vehicles, in shipbuilding, and also for petroleum and gas pipelines at pumping stations.
(2) For the majority of pipeline compensators, a growth in vibration stiffness by tens and hundreds of times in comparison with the static stiffness with the increase of frequency is observed. This growth is caused by the occurrence of working fluid pressure pulsations inside the compensator (when it undergoes vibration deformation) and by the resonances of the compensator structure.
(3) Comparison of experimental data with the results from a numerical analysis of the transfer of vibration and pressure pulsations through the compensators made on the basis of bellows and rubber cord shells, as well as through new types of compensators with thin-layered rubber–metal components, testifies to the validity of the physical and analytical models for calculating the interaction between the vibration of a compensator and the occurring pressure pulsations that have developed proceeding from the results of studying the transfer of vibration through compensators containing working medium.
(4) In the experimentally revealed frequency band, the vibration forces transferred through the structure of a water-filled compensator are damped by forces caused by pressure pulsations. Under such conditions, the intensity of vibration transmitted through the compensator decreases by a factor of ten or more in comparison with the vibration transmitted through the structure of a compensator without liquid. It is proposed to use this phenomenon for practical applications.
(5) By using active damping systems, the forces and pressure pulsations transmitted through the compensator can be decreased by an order of magnitude or more. Their damping ratio up to 32 dB in the frequency band from 10 to 350 Hz has been obtained experimentally.
(6) More efficient performance of active vibration protection systems is limited by the occurrence of self-oscillations in increasing the feedback circuit gains. One of possible methods for increasing the effectiveness is to introduce links with damping in the controller.
(7) Further investigations into joint active damping of pressure pulsations and dynamic forces in the pipeline compensators should be aimed at improving the control algorithms and developing methods for calculating the pulsations and vibration forces transmitted by liquid-containing compensators used as part of a pipeline.
REFERENCES
A. V. Kiryukhin, O. O. Mil’man, and A. V. Ptakhin, “Reducing vibration transfer from power plants by active methods,” Therm. Eng. 64, 912–919 (2017). https://doi.org/10.1134/S0040601517120047
V. I. Popkov and S. V. Popkov, Oscillations of Mechanisms and Structures (Sudarynya, St. Petersburg, 2009) [in Russian].
A. V. Kiryukhin, O. O. Milman, and A. V. Ptakhin, “A search for the physical principles of improving the power unit pipeline expansion joint with fluid vibroisolating properties. Ecology,” Int. J. Appl. Eng. Res. 11, 11176–11183 (2016).
A. V. Kiryukhin, O. O. Milman, A. V. Ptakhin, L. N. Serezhkin, and A. V. Kondratev, “Development and calculation-experimental analysis of pressure pulsations and dynamic forces occurrence models in the expansion joints of pipelines with fluid,” Int. J. Appl. Eng. Res. 12, 8209–8216 (2017).
A. V. Kiryukhin, O. O. Milman, A. V. Ptakhin, G. I. Shaydurova, and A. A. Shaydurov, “Design features of rubber expansion joints and numerical modeling of their stress-strain state in the hydrostatic compression,” Eng. Solid Mech. 5, 177–184 (2017). https://doi.org/10.5267/j.esm.2017.6.001
I. Zh. Bezbakh, V. A. Melik-Shakhnazarov, D. V. Sofiyanchuk, and V. I. Strelov, “New design of active vibration protection devices,” Nauka Obraz.: Nauchn. Izd., No. 9, 22–23 (2012). https://cyberleninka.ru/article/n/ novaya-konstruktsiya-aktivnyh-vibrozaschitnyh-ustroystv
Funding
This work has been carried out based on Agreement no. 16-19-10292 dated May 12, 2016, between the Russian Scientific Foundation and Tsiolkovskii Kaluga State University on providing a grant for carrying out fundamental scientific investigations and search studies under the Investigation of Methods and Means for Reducing the Transfer of Vibration and Pressure Pulsations from Power Installations through Pipeline Vibration Isolators with Liquid by Suppressing Vibration Forces and Pulsations of Medium by Means of Active Damping Systems scientific project.
Author information
Authors and Affiliations
Corresponding author
Additional information
Translated by V. Filatov
Rights and permissions
About this article

Cite this article
Kirjukhin, A.V., Milman, O.O., Ptakhin, A.V. et al. Experimental and Calculation Studies into the Possibilities of Improving the Vibration Isolation of Power Installation Pipelines. Therm. Eng. 67, 430–440 (2020). https://doi.org/10.1134/S0040601520070046
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S0040601520070046