
Abstract
This paper presents the results of an analysis of the influence of a wide range of uncontrollable factors on the accuracy of the estimates of the of the Earth orientation parameters (EOP) formed onboard a spacecraft on the basis of the information technology developed by the authors. The proposed information technology is based on least-squares-method (LSM) processing of distances to ground stations, the position of which is known with geodetic accuracy. The analysis includes consideration of the following factors affecting the accuracy and reliability of the estimates obtained: measurement errors of the above-mentioned ranges, errors of spacecraft ephemeris, restrictions on the conditions of measurements and scheduling communication sessions between spacecraft and ground stations, conditions of spacecraft availability for conducting measurement sessions, unpredictable evolution of EOP, and EOP dynamic model variants used in the framework of the LSM. The results of the analysis obtained by modeling the procedure for refining the EOP using the proposed technology made it possible to formulate qualitative and quantitative recommendations for optimizing online experiments that will be implemented in the future by onboard spacecraft algorithms that perform described in the technology procedures.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
INTRODUCTION
At present, the regular operation of satellite systems for various purposes is ensured by attracting a developed ground infrastructure. At the same time, a significant amount of its available resources are used to construct so-called “ephemeris-time support,” including onboard spacecraft data loading received on the ground under conditions of two coordinate systems forced alignment—an Earth-based coordinate system (International Terrestrial Reference Frame (ITRF)), in which the coordinates of the corresponding ground systems are referenced, including control complexes, measuring points and other infrastructure facilities, and the Geocentric Celestial Reference System (GCRS), in which the movement of spacecraft is determined and their trajectories are formed taking into account disturbing influences. Due to the change in the orientation of the equator and the ecliptic of the Earth and its rotation, the Earth’s coordinate system rotates relative to the celestial one. This movement is a complex process, consisting of nutation and precession of the Earth’s rotation axis, the daily rotation of the Earth with an uneven angular velocity, and the displacement of the Earth’s pole relative to its intermediate position. At the moment, all these processes are strictly controlled by a number of international services, including the International Astronomical Union (IAU) and the International Earth Rotation Service (IERS), which use significant resources for operation of a special complex of ground-based facilities (for example, Very Long Baseline Interferometry) for tracking celestial bodies and stars. Based on their use, the IERS regularly publishes a series of bulletins with data on current and predicted displacement of the Earth’s pole xp and yp and the value of irregularity of its daily rotation ΔUT. The consumers of this data are space agencies and mission control centers, which either use them for their own needs when calculating high-precision ephemeris of satellite constellations or are forced to develop an alternative complex infrastructure that will allow carrying out similar astrometric measurements with their subsequent processing and calculation of the Earth orientation parameters (EOP).
Thus, the implementation of spacecraft onboard autonomous refinement in real time of the evolving geodynamic parameters of the Earth as applied to currently operated satellite systems seems to be a promising direction for improving the consumer characteristics of such systems in terms of increasing their autonomy and reducing operating costs. At the same time, a critical moment in this problem is the creation of an information technology that makes it possible to refine the changes in the parameters of the Earth orientation (EOP) onboard the spacecraft, that is, xp, yp and ΔUT, due to the uncertainty in the evolution of these parameters in comparison with the precession and nutation parameters. The authors of this article in cooperation with the specialists of JSC Academician M.F. Reshetnev Information Satellite Systems have proposed a concept of such information technology, which includes the following provisions [1]: solving the problem of onboard spacecraft EOP estimating by the least-square method (LSM) processing of accumulated measurements of distances between the spacecraft and special ground stations, the positions of which are known with geodetic accuracy; forming, within the framework of the LSM procedure, algorithms for processing range measurements between spacecraft and stations based on analytical expressions in the form of partial derivatives of the mentioned ranges with respect to the components of the EOP; simulation modeling of EOP vector components refinement in order to analyze the errors in the estimates of the pole displacement and the Earth rotation irregularity obtained as a result of processing the distance measurements between the spacecraft and special ground stations.
The results of the described concept implementation presented in [1] confirmed the potential possibility of refining the EOP onboard the spacecraft. In particular, it was shown that the algorithm proposed in [1] allows maintaining a stable process of forming EOP estimates evolving in real time EOP with errors no more than 10 mas (angular millisecond) for each of the parameters (at a level of two standard deviations (RMS)). At the same time, in the experiments, 2000 measurements were processed at each measurement interval with random errors addition. The number of spacecraft considered in the simulation is 20, and there were six stations.
The main condition for the successful implementation of this technology onboard a spacecraft is the optimization of online experiments, including procedures for gathering and processing measurements in order to achieve maximum accuracy and reliability of the generated EOP estimates. Within the framework of solving the corresponding optimization problem for the experiment, it is proposed to use a complex criterion, the maximization of which, taking into account the existing technical constraints, determines the goal of working out possible cyclograms of the operation of onboard spacecraft algorithms for EOP onboard refining. In turn, one prerequisite for formalizing the above criterion and solving a similar optimization problem with its use is a carrying out a preliminary analysis of the EOP accuracy estimate's dependence obtained on the basis of the proposed technology on the influence of the following uncontrolled factors and various physical natures of errors arising during measurements between the spacecraft and ground stations: spacecraft ephemeris errors, restrictions on the measurement conditions, including limitations imposed by the technical capabilities of the information exchange channel between spacecraft and stations; spacecraft availability conditions for conducting sessions; the unpredictable evolution of the EOP; variants of the model used within the LSM framework of the refined components of EOP vector; and options for setting up periods of spacecraft with ground stations communication sessions.
Thus, this paper aims at creating the necessary conditions for solving the optimization problem of an experiment on EOP autonomous refinement in the interests of achieving the highest accuracy and the required level of reliability of the EOP estimates in relation to the existing possibilities of using onboard facilities and free resources within the framework of actual spacecraft operation cyclograms.
1 MATHEMATICAL MODELS OF SIGNIFICANT UNCONTROLLABLE FACTORS USED IN THE ANALYSIS
This section describes the used models of the factors listed above, which have a significant impact on the results of the EOP refinement process onboard a spacecraft.
Inaccuracies that arise in the course of measurement of the distances between a spacecraft and ground stations are due to the influence of a number of physical factors, such as signal delay in the equipment; signal delay during its propagation, including in the ionosphere and troposphere; shift of the onboard clock scale of the signal receiver and transmitter relative to the system time; and random errors (noise). All these error factors are described in more detail in [2, 3], and the model for measuring the distance between a spacecraft and a station is given in [4]. In the most general case, the discussed model includes a set of additive random errors, the statistical characteristics of which are known. Since some components of a such measurement model are variable, depending on the conditions of their conduct, and the rest are relatively stable, it was decided to present this model in a simplified form: \({{\rho }_{{meas}}} = \rho + \Delta {{\rho }_{{Sys}}} + \Delta {{\rho }_{{Stoh}}}\), where \(\Delta {{\rho }_{{Stoh}}}\) is the random component of the measurement error, for which the maximum value is known at a confidence level of 0.95; \(\Delta {{\rho }_{{Sys}}}\) is the systematic component of the measurement error, i.e. a random variable with a “drift,” the speed of which is described by a random variable with a known variance at a confidence level of 0.95; and \(\rho \) is the actual measured range [1].
The use of such a model makes it possible to vary the level of measurement errors during the experiments to analyze their influence on the accuracy of the obtained EOP estimates up to the maximum, i.e., within the framework of the so-called “guaranteeing approach.”
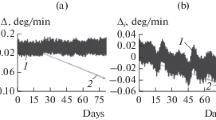
Ephemeris errors are interpreted within the framework of this paper as random processes with characteristics varying depending on the spacecraft motion model’s details in the field of disturbing forces, taking into account a wide range of uncontrollable factors [5, 6], such as anomalies of the Earth’s gravitational potential, attraction of third bodies, the pressure of sunlight, and albedo. It is known that, during the operation of a spacecraft, errors occur in the so-called “reference” (calculated onboard) ephemeris (coordinates and components of the velocity vector), the statistical characteristics of which are known only approximately. The accumulated experience in this area from studies of the divergence of the GLONASS ephemeris [7–9] shows, in particular, that, for a spacecraft of this type in a medium orbit, the development of ephemeris errors can be described by random processes with known statistical characteristics. In this case, the development of the errors of the spacecraft ephemeris is most conveniently represented in orbital axes in radial, transverse, and binormal directions:
where a0, a1, a2, b0, and b1 are coefficients of the quadratic trend, ω and φ are harmonic coefficients, and T is time in days. The evolution of errors in the orbital axes corresponds to the dependences shown in Fig. 1.

Evolution of spacecraft ephemeris errors.
Limitations for conducting measurement sessions are due to specific infrastructural and technical features of the satellite systems operation associated with the need to place the appropriate hardware and software both onboard the spacecraft and on the Earth, as well as the existence of the corresponding operating cycle of the discussed algorithms. Thus, the study of the influence of this factor on the results of EOP refinement presumes an EOP accuracy characteristics analysis under the conditions of variability of the measurement frequency, the total number of measurements on the interval, the permissible repetition rate of the measurement sessions, the duration of the sessions, the number of participating spacecraft, the number of stations used, and the correspondence of data between the spacecraft and the capacity of this channel.
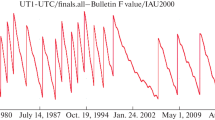
Unpredictable evolution of the displacement of the poles and, mainly, the irregularity of the Earth’s rotation ΔUT is caused by the physical nature of their change, which is not fully understood [4, 10, 11]. As a consequence, the change in the real values of EOP can sharply differ from their previously assumed values obtained by its evolution predicting using short-term linear or long-term polynomial trends. To take this factor into account in the experiment, it is not enough to use a model based only on loading an EOP evolution’s posteriori data available for past time intervals (here, we are talking about the use of C04 bulletins in experiments [12] for modeling the real EOP values). The reason for this is the fact that it is not guaranteed that the EOP evolution will be similar in the future, in contrast to the relatively stable model of the divergence of the spacecraft ephemeris errors, which is generally unchanged.
An alternative approach to the formation of the EOP evolution model would be to use a histogram of the daily evolution of the EOP over a long period of time, which ultimately will lead to a probabilistic and guaranteeing approach when modeling the evolution of the EOP in experiments in future periods (see Fig. 2). At the same time, changes in EOP are implemented in the form of additions to their current daily values.

Histogram of daily ΔUT changes over 10 years of evolution.
Within the framework of this paper, to analyze the impact of the unpredictable EOP evolution, the technique that we have developed is analyzed using both probabilistic and guaranteeing approaches.
The type of EOP model refined onboard exists in several variants that differ in the degree of the polynomial describing their evolution. The simplest method—the specification of the EOP components as constants—has a drawback associated with the drift of the actual values of the estimated parameters during the measurements accumulation process. The representation of EOP in the form of linear trends is complicated by their subsequent assessment due to the presence of measurement noises under the conditions of evaluating values of different orders (the constant part of the EOP and the daily derivative of their change). The representation of EOP in the form of second-degree polynomials complicates the estimation process due to the presence of a large number of state vector components, for estimation of which it is necessary to obtain the corresponding observability conditions [13]. In other words, it seems necessary to use all the above variants of the model of updated EOP for the analysis.
2 FEATURES OF THE RESEARCH SOFTWARE
To study the influence of the above factors on the EOP estimating process, we modified software [1, 14], which, in the end, included components that allow modeling
—a retrospective real spacecraft trajectory based on available high-precision ephemeris (15, http://www. glonass-svoevp.ru/index.php?option=com_content& view=article&id = 55 & Itemid = 259 & lang = ru);
—predicted trajectories of spacecraft movement using a specialized software block [6];
—the retrospective evolution of EOP based on real data from C04 bulletins;
—the future evolution of EOP based on trends with the addition of the maximum level of change and taking statistics into account (Fig. 2);
—the rotation of the Earth taking into account the precession and nutation of the Earth’s equator based on the use of the ratios recommended by the IERS [10];
—errors in measurements and errors in predicting spacecraft ephemeris onboard using the models described above.
In addition, the above mentioned software included blocks necessary for processing measurements using the least squares method in accordance with the ratios of online EOP refinement algorithms described in [1], including analytical partial derivatives of range measurements by EOP, as well as blocks that provide control of the results of these procedures for the divergence of the estimates.
3 EXPERIMENTS
The following were considered as the initial data for the experiments:
—the time interval according to the UTC scale from 2009 to 2019;
—the number of spacecraft in the constellation is from 1 to 20 (circular orbits with an inclination of 64.8° degrees and an altitude of ~19 400 km);
—a number of stations from one to six at randomly selected points, including on the territory of the Russian Federation.
The general functional diagram of the experiments carried out is shown in Fig. 3.

Functional diagram of simulation using software.
In Fig. 3, it is shown that the main unit is the control unit for the data-gathering periods of the spacecraft-station measurement, which also performs these sessions predicting and control of the measurement-processing algorithms, including concerning the composition of the state vector, the sample size, and the accumulation interval.
4 ANALYSIS OF EXPERIMENTAL RESULTS
4.1 Influence of Measurement Processing Conditions
The results of studying the conditions’ influence for conducting experiments on the gathering and processing of measurements of the distance between the spacecraft and Earth stations on the final accuracy of the resulting estimates are shown in Figs. 4–7. Specifically, Figs. 4 and 5 show several curves corresponding to the use in experiments different numbers of spacecraft—one, three, and six. The dependences show the resulting errors in the estimates of EOP expressed in mas at a confidence level of 0.95 and a different number of processed measurements.

Estimation error xp (mas) at a probability level of 0.95 depending on the number of spacecraft and the number of accumulated measurements.

Estimation error ΔUT (15 · ms) at a probability level of 0.95 depending on the number of spacecraft and the number of accumulated measurements.
Based on the experimental results shown in Figs. 4 and 5, the following conclusions can be drawn. The accuracy of the processing results depends on the number of measurements nonlinearly, which is connected with the EOP evaluation influence on the methodological error in estimating them in the least squares method as constants and subsequently leads to estimation errors increasing. In other words, an increase in the number of spacecraft, which allows increase the estimation accuracy (see the figure above), is only leads to acceleration of needed number of measurements accumulation, since, ultimately, the number of measurements processed per unit of time (interval—day) eventually determines the accuracy of the estimates.
Thus, the presented dependences and the results of their analysis make it possible to determine the required number of measurements to be processed during a day based on the requirements for the accuracy of the obtained EOP estimates and the number of spacecraft available for conducting sessions.
4.2 Effect of Measurement Errors
All other things being equal, the value of the standard deviation (SD) of random measurement errors in the first approximation linearly affects the SD of the errors of EOP estimates (see Fig. 6).

RMS error evaluations of EOP (xp, yp, mas; ΔUT, ms) depending on the standard deviation of random measurement errors.
Figure 6 shows the dependences characterizing the standard deviation of the errors, xp and yp designate the errors in the estimates of the pole displacement, and ΔUT is the error in the estimation of the Earth rotation irregularity. Indices 1 and 2 in the designations of the presented dependences indicate the number of measurements accumulated in the experiment for processing the least squares at a one dimensional interval: 1 corresponds to the use case of 1000 measurements and 2 to 2000, respectively. The greatest effect from increasing the number of measurements to 2000 is achieved with respect to errors in determining the pole due to the relative stability of evolution of xp and yp, while the irregularity of the Earth’s rotation is estimated even worse with a larger number of measurements due to the objectively existing uncertainty of its development.
The presence of unspecified systematic measurement errors resulting in a “drift” of systematic errors leads, as expected, to the divergence of the least squares method. When these errors are included as matching parameters in the composition of the estimated components of the state vector, along with the EOP, the LSM operates stably.
4.3 EOP Evolution Trend Estimation
An attempt to estimate the coefficients of the linear or quadratic polynomials describing the EOP evolution showed that the solution of this problem requires a larger number of measurements. In particular, to estimate the linear trend coefficient describing the time dependence of EOP change, the results of calculating obtained estimation accuracy dependence on the number of measurements appear as follows (Fig. 7).

Errors in the estimation of the zeroth EOP vector components in mas and the derivatives of EOP evolution in mas/day.
Figure 7 shows the dependences characterizing the errors in the estimates of linear trends coefficients describing EOP evolution as a function of the number of processed measurements—namely, the initial values and derivatives of the daily change. It is noticeable that, to refine the parameters of even a linear polynomial, an order of magnitude more measurements are required (not 500–1000, as shown above, but more than 5000), which can lead to the complexity of the technical implementation of such a procedure due to restrictions on the number of stations, spacecraft, and areas of mutual visibility. Using the coefficients of quadratic dependences to estimate EOP is practically impossible, since it requires even more measurement than are shown in Fig. 7. Such intervals of accumulation of measurements (up to 10 000) may require several days of operation of the spacecraft and the station within the framework of one refinement cyclogram, which entails a potential divergence of the evolution model of any EOP parameters in a direction other than that used in the processing algorithms for the a priori assumption of its trend. Thus, in the first approximation, it is advisable to consider their values as constants when assessing the EOP, while the measurement accumulation intervals and the repetition rate of the sessions should be selected in the manner proposed in this paper. In this case, the error caused by the EOP evolution for the period of measurement “obsolescence” can be neglected.
4.4 Effect of Ephemeris Errors
Errors of the spacecraft ephemeris in the inertial CS (the coordinates of the stations are known in the Earth’s CS with a very high accuracy) have the greatest effect on the convergence of the least squares and the accuracy of the generated EOP estimates. At the same time, even an insignificant trend in the growth of errors (0.001 m in RMS of errors per day for the components of the spacecraft coordinates), even provided that 2000 measurements are accumulated, leads to inadequate real evolution of the EOP estimates. It is possible to compensate for this factor by incorporating the components (mainly radial) of the spacecraft ephemeris errors into the state vector estimated by the least squares method. At the same time, they can be included in the estimated vector as constants only under conditions when the ephemeris errors are constant, even if their values are large (up to 100 m). If the dynamics of these errors is occured and the trend coefficient describing this dynamics is unknown, then, as modeling shows, in the estimated components of the state vector and in the number of corresponding elements of the matrix of partial derivatives, it is necessary to include unknown trend parameters for each spacecraft: the initial value and the coefficient growth. In this case, the LSM algorithm demonstrates convergence and generates adequate EOP estimates. Experiments have confirmed that the fastest possible accumulation of measurements at short intervals contributes to a significant (by an order of magnitude) improvement in the accuracy of EOP estimates.
In particular, if the growth of the RMS of ephemeris errors is 1 cm per day, the following characteristics of the EOP estimates accuracy can be observed:
—in the presence of the above-described procedures for adaptation to ephemeris errors in the LSM and the accumulation of 1000 measurements, the errors of EOP estimates at a probability level of 0.95 do not exceed 15 mas;
—in a situation in which the accepted growth rate of the expected trend of ephemeris errors is less than their real value (for example, by a factor of 2), the errors of EOP estimates increase to 36 mas or more;
—in the absence of a mechanism for adapting the elements of the CP matrix in relation to the trend of ephemeris errors, it is not possible to achieve a stable LSM solution with convergence; in this case, the errors of EOP estimates reach 200 mas or more at a confidence level of 0.95, which is unacceptable for use in applied purposes.
In such a situation, the solution is to involve intersatellite measurements and their integration within the framework of the developed information-technology procedures. Since, based on the processing of intersatellite measurements, it is possible to refine the spacecraft ephemeris in inertial space, such an integration of measurements ultimately will have a positive effect on the accuracy of the obtained EOP estimates. What results this will allow to be obtained will be clear when in the course of a separate researching, which is not the subject of this article.
CONCLUSIONS
This article presents the results of an analysis of the influence of a wide range of uncontrollable factors on the accuracy of EOP estimates created onboard the spacecraft based on the proposed information technology.
Based on the simulation modeling of EOP refinement process, the following is shown:
—an increase in the standard deviation of random measurement errors leads to a proportional increase in the errors of EOP estimates, with the proportionality factor being determined by the number of processed measurements;
—systematic measurement errors should be included in the number of the estimated vector components as matching parameters in order to exclude their influence on the accuracy of EOP estimates;
—the most appropriate model for the dynamics of EOP from the point of view of the “accuracy/performance of the algorithm” criterion is the representation of the components of this vector as constants;
—organization of online experiments should ensure the fastest possible accumulation of the number of measurements, which will guarantee obtaining EOP estimates that are adequate to the real dynamics;
—to eliminate the negative impact of ephemeris errors, it is necessary to use the LSM adaptation mechanism to the ephemeris error trend coefficient.
The conclusions and recommendations formulated above can serve as the basis for the creation of a complex criterion and procedure for optimizing an online experiment as applied to the implementation of a promising onboard spacecraft algorithm for autonomous EOP refinement ERP.
REFERENCES
Grechkoseev, A.K., Krasil’shchikov, M.N., Kruzhkov, D.M., et al., Refinement of the Earth’s orientation parameters on board spacecraft. Concept and information technology, Izv. Ross. Akad. Nauk: Teor. Sist. Upr., 2020, no. 4, pp. 125–135.
Global’naya sputnikovaya navigatsionnaya sistema GLONASS. Interfeisno-kontrol’nyi dokument (redaktsiya 5.1) (Global Navigation Satellite System. Interface Control Document (Edition 5.1)), Moscow: Ross. Nauchno-Issled. Inst. Kosmich. Priborostr., 2008.
Sovremennye informatsionnye tekhnologii v zadachakh navigatsii i navedeniya bespilotnykh manevrennykh letatel’nykh apparatov (Modern Information Technologies in the Navigation and Guidance of Unmanned Maneuverable Aerial Vehicles), Krasil’shchikov, M.N. and Sebryakov, G.G., Eds., Moscow: Fizmatlit, 2009.
Bartenev, V.A., Grechkoseev, A.K., Kozorez, D.A., et al., Sovremennye i perspektivnye informatsionnye GNSS-tekhnologii v zadachakh vysokotochnoi navigatsii (Modern and Advanced GNSS Information Technologies in High-Precision Navigation Tasks), Moscow: Fizmatlit, 2014.
Vallado, D., Fundamentals of Astrodynamics and Applications, New York: Springer, 2007.
Kozorez, D.A., Krasilshchikov, M.N., Kruzhkov, D.M., et al., Integrated navigation system for a space vehicle on a geostationary or highly elliptic orbit operating in the presence of active jam, J. Comput. Syst. Sci. Int., 2013, vol. 52, no. 3, pp. 468–469.
Grechkoseev, A.K., Technologies for improving the accuracy of determining the orbits of spacecraft using intersatellite measurements in conditions of autonomous operation, Cand. Sci. Dissertation, Moscow: Moscow Aviation Inst., 2011.
Vasilenko, A.V., Grechkoseev, A.K., Muratov, D.S., et al., Algorithm for calculating proper ephemeris aboard GLONASS navigation satellites using mutual pseudo-range measurements between them, Naukoemkie Tekhnol., 2014, vol. 15, no. 9, pp. 43–50.
Grechkoseev, A.K., Study of observability of motion of an orbital group of navigation space system using intersatellite range measurements. I, J. Comput. Syst. Sci. Int., 2011, vol. 50, no. 2, pp. 293–308.
IERS Technical Note 36. IERS Conventions (2010). www.iers.org/IERS/EN/Publications/TechnicalNotes/ tn36.html?nn=94912. Accessed May 14, 2019.
Zhukov, A.N., Zotov, S.M., Korobkin, V.A., et al., Solving the problem of the accuracy of the GLONASS system and the prospects for its improvement in the coming years, Tr. Inst. Prikl. Astron. Ross. Akad. Nauk, 2015, vol. 35, pp. 17–23.
Bizouard, C., Lambert, S., Gattano, C., et al., Combined solution C04 for Earth Rotation Parameters consistent with International Terrestrial Reference Frame 2014, J. Geodesy, 2019, no. 93, pp. 621–633.
Lebedev, A.A., Bobronnikov, V.T., and Krasil’shchikov, M.N., Statisticheskaya dinamika i optimizatsiya upravleniya letatel’nykh apparatov (Statistical Dynamics and Optimization of Aircraft Control), Moscow: Mashinostroenie, 1985.
Akimov, E.V., Kruzhkov, D.M., and Yakimenko, V.A., Prototype information system for high-precision navigation in global satellite systems, Russ. Eng. Res., 2020, vol. 40, no. 2, pp. 156–159.
Global’naya sputnikovaya navigatsionnaya sistema GLONASS. Sistema vysokotochnogo opredeleniya efemeridno-vremennykh popravok. Interfeisno-kontrol’nyi dokument (redaktsiya 3.0) (Global Navigation Satellite System. System of High-Precision Determination of Ephemeris and Time Corrections. Interface Control Document (Edition 3.0)), Moscow: Inf. Anal. Tsentr TsNIIMash, 2010.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Krasil’shchikov, M.N., Kruzhkov, D.M. On the Issue of Autonomous Refining of the Earth Orientation Parameters onboard Spacecraft. Analysis of the Possibilities of Developed Information Technology. Cosmic Res 59, 357–365 (2021). https://doi.org/10.1134/S0010952521040043
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S0010952521040043