
Abstract
A bilevel programming is a two-level optimization problem, namely, the upper level (leaders) and the lower level (followers). The two level’s decision variables are entwined with each other which increases the complexity to obtain the global solution for both the optimization problems. Each level aims to optimize their own objective function under the given constraints at both the levels. To reduce the complexity partial cooperation between the two levels has been exploited in obtaining the Pareto solution. A novel solution procedure is proposed for a multi-objective fuzzy stochastic bilevel programming (MOFSBLP) problem is studied and solved using genetic algorithm. In this paper, previous information of the lower level is used as a fuzzy stochastic constraints in the upper level along with its constraints. Then with the solution of the combine constraints, the lower level solution is evaluated. The proposed solution procedure is illustrated by a numerical example taken from Zheng et al., and results are compared. A simpler version is solved using GAMs software to analyze the result of the numerical example. The proposed method highlights the importance of partial cooperation in solving bilevel programming problem. The advantage of the proposed solution method is that it creates common constraint space which helps in convergence of the algorithm.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
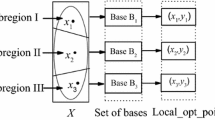
The bilevel programming (BLP) problem is a subclass of multi-level programming (MLP), where the latter deals with decentralized planning problems with a number of decision-makers (DMs) and the former with only two levels and decision-makers respectively. In multi-level company/organizations or a hierarchical structure of decision systems, the decisions taken influence each level as a vicious circle. In the BLP problem, two decision-makers are located at two different hierarchical levels, each independently controlling a subset of decision variables with different set of objectives. The upper-level decision-maker (DM) is called the leader who makes its decision forthrightly to the lower-level DM called the follower. The decision-makers at different levels aim to maximize their own objective function which in turn affect the optimal value of the respective optimization problem. This complexity is further enhanced with multiple objectives at one or both the levels. In the presence of multiple conflicting objectives, one solution cannot optimize all the objectives, so an efficient solution is needed. Further, the non-convexity and non-linearity either in the objective functions or constraints amplify their computational complexity. In addition, under different set of environment such as fuzzy, stochastic, fuzzy stochastic, cooperative, non-cooperative, and partial cooperative, the solution methodology to solve the bilevel programming becomes more challenging. Thus, in order to obtain a global solution for the BLP, the researchers largely depend on objectives reduction technique such as Karush–Kuhn–Tucker (KKT) conditions in case of multi-objective and evolutionary algorithms or hybrid methods and/or algorithms. Moreover, with the use of evolutionary algorithms, it becomes challenging to obtain a global optimal solution that will satisfy both the levels’ decision-makers, and therefore the decision-makers settle for the Pareto-optimal solution. Although it is challenging, but bilevel programming issues frequently arise in many real-world optimization scenarios and need to be studied rigorously. Thus, in short, bilevel programming is a dynamic and expanding area as it lies at the intersection of game theory and decision science offering functional and practical framework for modelling and solving the real-world hierarchical decision-making problems. The potential of handling big and complex real-world problems makes it more attractive to the researchers.
1.1 Background
Bracken and McGill [1] initially studied the bilevel programming problem which is an (NP) hard problem [2,3,4], and Candler and Norton introduced the term bilevel in [5]. However, because of the close relation between Stackelberg’s work on the duopoly games [6] and bilevel programming which sparked greater interest in BLP in the latter years. A good starting point to study the bilevel programming for the academics and researchers can be found in [7] with key concepts, solution methodologies and applications, and some other related books in [8,9,10]. Some of the traditional approaches such as vertex enumeration [11] and transformation methods [12] were used to solve bilevel programming problem. In the vertex enumeration method, compromise vertex are searched controlling the decision variables, and as such this method is inefficient. On the other hand, transformation method uses Kuhn-Tucker condition or Penalty function to transfer the lower level programming as the constraint in the upper level programming and then the corresponding programming is solved.
As the bilevel programming consists of two levels, namely, the upper and the lower level or the leader and the follower, so to reach at a common optimal solution is very much desirable without compromising individual goals. Thus, in order to obtain the global solution of bilevel problem, many researchers converted the bilevel programming problem into a single objective problem. The programming such as goal programming and fuzzy programming were extensively employed to solve bilevel problem because of its easier implementation and for obtaining the global solution. Along this line, a solution procedure was developed [13] to replace the sub-problem of a two-level programming problem by its Kuhn-Tucker (K-T) condition and transform it into a mixed integer quadratic programming problem. Further, a non-cooperative two person game was presented as a mixed integer linear bilevel programming problem [14], where the leader’s choice do not influence the choices of the follower. Apart from the papers mentioned above, a different approach was studied where the upper level includes within its strategy the lower level’s reaction to its decision making process. To incorporate this idea, an exact and inexact penalty approach was designed to solve general bilevel programming problem [15]. A different approach, the homotopy method, was used in [16] to obtain global solution of the bilevel problem. A sufficient condition for the global convergence was provided which converges to K-K-T point. Besides these methods, a different form such as convex bilevel programming problem was formulated using merit function [17] and solved by branch and bound method to obtain the global solution. The combination of above methods are also used to solve bilevel problem, [18] presented a penalty function method based on Kuhn-Tucker condition for solving linear bilevel programming.
1.2 Multi-objective Bilevel Programming
Single objective bilevel programming problems have been studied more due to its less complexities [8, 19, 20]. There exist an analogy between the single-level and bilevel multi-objective, where for an arbitrary binary relation, a sufficient condition is formulated to ensure the equality between the set of optimal solution and the efficient solution generated by the binary relation [21]. A necessary optimal condition is given for the conversion of the multi-objective programming into its locally equivalent to the single-level optimization problem [22]. With the growing interest in the methodology in solving linear bilevel and single-level programming, the interest in solving multi-objective further enhanced. Although it was quite latter, the researchers considered the multi-objective bilevel programming, the multiple conflicting objectives either in the upper or in the lower level or in both. In [23], the multi-objective bilevel programming problem was studied, and various optimality conditions were derived and analyzed for the combined problem involving both the upper and the lower level together. An efficient solution is generated to solve the multi-objective bilevel programming (MOBLP), and a necessary and sufficient is provided [24] to obtain the efficient solution. In addition to the mathematical methods, different algorithms were proposed to solve MOBLP- to generate Pareto frontier [25], interactive balance algorithm [26] for the three-level multi-objective decision-making model. Apart from the above mentioned methods, the multi-objective bilevel programming are often converted to single-level programming problem using fuzzy set theory and fuzzy approach, and the corresponding converted problem is solved either by commercial software or by developing new algorithm such as Kth best algorithm [27]. Due to its immense use to solve multi-objective BLP, more details about the fuzzy approach and fuzzy goal approach are discussed in the next subsection.
As multi-objective problems frequently used to depicts the real life problems, so the MOBLP are used in formulating real life problems. A hybrid intelligent algorithm was designed consisting of fuzzy, stochastic simulation and genetic algorithm along with simplex method to solve the facility location problem. The mathematical model formulated for the facility location problem as the bilevel programming where the objective was to optimize the customer flow with fuzzy trip cost [28]. Some of the application areas where MOBLP are used can be found in [10, 29,30,31,32]. A detailed review on multi-level and bilevel multi-objective programming with future research areas is presented in [33].
1.3 Fuzzy Programming
In order to avoid the complexities of vertex enumeration and transformation method, [34,35,36,37] used tolerance membership function to measure the satisfaction level of the objective functions and develop fuzzy approach to solve BLP. Fuzzy programming approach with fuzzy goals at both levels were implemented in [38] to study the decentralized two-level linear programming problem with one decision-maker at the upper level and one or more decision-makers at the lower level, i.e., multiple followers. Their method was based on the concept of minimal satisfactory level considered by the upper level to obtain a tentative solution by balancing both the levels. In addition, a linear fraction chance constrained bilevel programming problem was formulated with fuzzy goals [39] and solved using fuzzy goal programming approach. Apart from the mathematical method different algorithms were used, an \(\alpha\) cut algorithm was used in [40] to solve linear multiple objective bilevel decision problem with fuzzy goals. Furthermore, the above approaches were used to solve different BLP problems non-linear integer BLP [41], with quadratic BLP [42], fuzzy parameters [43], genetic algorithm based fractional [44], and quadratic [45] BLP, bilevel quadratic fractional programming problem [46]. The recent theoretical findings relevant to bilevel programming are arranged in [47].
1.4 Computational Approaches
Transforming the multi-objective bilevel programming to single objective using the fuzzy approach has been applied in many problems to obtain the global optimal. On the other hand, Evolutionary methods such as genetic algorithm have played a vital role in obtaining the solution of bilevel programming problem due to its search method. An interesting review has been presented on the bilevel programming along its applications in [48] moving from classical to evolutionary techniques. The concept of Genetic Algorithms (GA) are motivated from the process of biological natural selection, developed by Holland [49]. GA has made significant improvement since then over the traditional methods by providing a set of an efficient domain independent search heuristics. The GA models commonly uses binary or real parameters as an initial solution, with processes such as mutation, crossover, and, fitness selection. Chance constrained programming model involving fuzzy parameter as the decision variables in the objective function and in the constraints were handled through the technique of genetic algorithm–based fuzzy simulation [50]. Due to its easy implementation and less restriction on problems, parallelism, and global perspective, [51] firstly developed genetic algorithm to solve BLP. For the above mentioned reasons, other researchers proposed types of genetic algorithm to solve BLP [52,53,54,55]. Goal programming depends on the weighted vectors to convert multiple goal attainment into a single objective programming problem with additional constraints. To reduce this dependence and to circumvent the additional constraints, [56] suggested goal programming as a multi-objective optimization problem to obtain the multi-Pareto optimal solution using genetic algorithm. In [28, 57], to solve stochastic programming problem, GA-based stochastic simulation were used. The idea was further extended to GA based fuzzy simulation to solve multi-objective fuzzy stochastic programming problems [58, 59]. GA have been used by many researchers to solve bilevel programming problem, to mention a few [51, 53, 60,61,62,63]. In order to solve the real-life problems containing bilevel programming, hybrid methods such as GA, and exact method [64], GA with PSO [65] are used to exploit their advantages to a full extent. On a different context, a hybrid method based on machine learning and integer programming problems is developed and applied in transportation science [66].
Particle swarm optimization (PSO) is also a population-based technique and aims to search the optimal solution by updating generations, although the strategy and the computation techniques applied by both are different. In [67], a PSO-based algorithm was developed to solve fuzzy linear bilevel decision problem, where optimization technique is adopted directly minimizing information loss. To strengthen further, an efficient method based on improved bilevel particle swarm optimization algorithm to deal bilevel programming problem was developed [68]. In case of nonlinear bilevel programming problem, [69] presented a neural network model by generating approximal optimal solution. They further analyzed the asymptotic properties for stability, feasibility, and optimality and derived the necessary conditions. In addition, a hybrid intelligent algorithm combining PSO with chaos searching technique was presented to solve nonlinear bilevel programming problem [70]. Application of bilevel programming problem can be found in numerous area like taxation (Labb’e et al. [71]), transportation (Yin [55]), airline industry (Cˆot’e et al. [72]), and terrorist threat (Arroyo and Galiana [73]). Recent development in the solution procedure on bilevel programming problem can be found in [74,75,76,77,78]. In [79], a comprehensive review on solving bilevel programming using metaheuristics approach is provided.
1.5 Uncertainty Environment
Optimization problems involving uncertainty and impreciseness in the data together either in the objective functions or in the constraints or both are referred to as fuzzy stochastic programming problems. In this type of mathematical models, the parameters are represented as fuzzy random variables. The novel idea of incorporating fuzziness to multi-objective stochastic programming was developed in [80]. To solve the linear fuzzy stochastic programming problems, [81] presented a novel approach of converting the original problem into a stochastic programming problem, and then stochastic optimization techniques are applied for solving the problem. The detailed mathematical models and their solution procedure involving fuzzy random variables are available in [64, 82,83,84,85,86,87,88], and [89] and the references therein. Real life contains uncertainty and to solve bilevel programming with uncertainty adds more complexity in it. Recently, some of the problems handled under uncertainty environment are provided in [90,91,92,93].
Recent researches on various configurations of optimization problems is provided below:
Authors/year | Types of objective | Variables/coefficients | Solution procedure | ||||
|---|---|---|---|---|---|---|---|
Single | Multiple | Crips | Fuzzy | Stochastic | Fuzzy Stochastic | ||
Abo-Elnaga and Nasr (2021) [94] | √ | √ | Modified genetic algorithm with a new selection technique and Chaos search | ||||
Abo-Elnaga and Nasr (2021) [95] | √ | √ | K-means cluster interactive algorithm–based evolutionary approach | ||||
Singh et al. (2022) [96] | √ | √ | Modified TOPSIS method under intuitionistic fuzzy environment and its application in production planning problem | ||||
Lv et al. (2024) [97] | √ | √ | Approximate KKT condition to obtain weak efficient solution | ||||
Garg et al. (2023) [98] | √ | √ | VIKOR approach to solve the BLMCNFP problem | ||||
Maiti et al. (2023) [99] | √ | √ | Goal programming strategy with neutrosophic number | ||||
Fatameh and Sadeghi (2022) [100] | √ | √ | Efficient point algorithm used under uncooperative environment | ||||
Yuhui and Zhang (2022) [101] | √ | √ | Evolutionary algorithm driven by correlation coefficient | ||||
Altınkaynak et al. (2022) [102] | √ | √ | Fuzzy goal programming approach | ||||
Peijun and Zhu (2023) [103] | √ | √ | Focus theory of choice where the optimal solution is chosen according to the solution’s focus | ||||
Goshu and Kassa (2022) [104] | √ | √ | Systematic sampling evolutionary method | ||||
Haghifam et al. (2022) [96] | √ | √ | Two stage stochastic programming—distributed energy resources | ||||
Wang et al. (2022) [105] | √ | √ | Two-stage stochastic fuzzy possibilistic programming with Bayesian model | ||||
Cheng et al. (2022) [106] | √ | √ | Fuzzy sorting algorithm—agricultural water resources | ||||
Deb (2021) [56] | √ | √ | Genetic algorithm with the base enumerating method to solve interval linear BLP | ||||
Our review of the literature revealed that many researchers are now using computation and hybrid approaches instead of traditional methods to solve multi-objective bilevel programming (MOBP) problems because they are easier to implement and involve less complexity. Finding novel and effective solutions to MOBP is crucial as it is an NP hard problem with many real-world applications involving uncertainty. Many researchers transform bilevel programming into a single-level programming to obtain the global solution. This approach of converting bilevel programming problem into a single level optimization problem motivated us to handle multi-objective bilevel programming without converting into a single-level optimization problem using partial cooperation. Partial cooperation plays a vital role in the proposed solution procedure as it creates a common constraint space for both the levels. Consequently, a novel genetic algorithm–based approach to solving MOBP with partial cooperation between the two levels is presented in this article.
The paper is organized as follows: Sect. 2 presents basic preliminaries, and the mathematical models under uncertainty is presented in Sect. 3. The procedure to solve the mathematical models is described in Sect. 4. A numerical example is provided to clarify the proposed method in Sect. 5. Finally, conclusion and discussion are presented in Sect. 6.
2 Basic Preliminaries
Definition 2.1
A fuzzy number \(\widetilde{A}\) is a convex normalized fuzzy set \(\widetilde{A}\) of the real line R, with membership function \(\widetilde{A}\): R → [0; 1], satisfying the following conditions.
-
1.
There exist unique interval J ∈ R such that \({\mu }_{A}\)(x) = 1: x \(\epsilon\) J
-
2.
The membership function \({\mu }_{A}\) is piecewise continuous.
Definition 2.2
[107] A fuzzy number \(\widetilde{B} = (B(p), B(m), B(o))\) is said to be triangular if its membership function is strictly increasing in the interval \((B(p), B(m))\) and strictly decreasing in \((B(m), B(o))\) and \({\mu }_{B}\left({B}_{m}\right)=1 ,\) where \(B(m)\) is core, \((B(m)-B(p))\) is left spread, and \((B(o)-B(m))\) is right spread of the fuzzy number \(\widetilde{B}.\)
Definition 2.3
[108] α cut of the fuzzy number \(\widetilde{A}\) is the set \(\{x | {\mu }_{A}(x) \ge \alpha \}\) for \(0 \le \alpha \le 1\) and denoted by \(\widetilde{A}\) [α].
Definition 2.4
A fuzzy number \(\widetilde{A}\) is said to be positive if its membership function \({\mu }_{A}(x) \ge 0;\) for all\(x \ge 0\). It may be stated as follows: Let \(\widetilde{A}[\alpha ] = [A* ; {A}^{*}]\) be the α cut of the fuzzy number \(\widetilde{A}\) for\(0 \le \alpha \le 1\). \(\widetilde{A}\) is said to be positive if\(A* \ge 0\).
Definition 2.5
[109] Let \(\widetilde{A}\) \(= (A(m); A(p); A(o))\) and \(\widetilde{B}=(B(m);B(p);B(o))\) be two fuzzy numbers with α cuts \(\widetilde{A}\) [α] \(=[A*;{A}^{*}]\) and \(\widetilde{B}\)[α]\(=[B*;{B}^{*}]\), respectively, then \(\widetilde{A} \widetilde{\le } \widetilde{B}\) if and only if \({A}^{*}\le B*.\)
Definition 2.6
[110] A fuzzy random variable is a random variable whose parameter is fuzzy number. Let \(\widetilde{X}\) be continuous random variable with fuzzy parameter \(\widetilde{\theta }\) and \(\widetilde{P}\) as fuzzy probability; then, \(\widetilde{X}\) is said to be continuous fuzzy random variable with density function \(f(x; \theta )\), \(\widetilde{P}\)( \(\widetilde{X}\) ≤ x) = \(\widetilde{\beta }\), where\(0 \le (\beta ) \le 1\); \(\widetilde{\beta }= (\beta (m); \beta (p); \beta (o))\), \(\beta (p) \ge 0\) and\(\beta (o) \ge 1\).
Definition 2.7
[110] Let \(E = [c, d]\) be an event. Then, the probability of the event E of continuous fuzzy random variable \(\widetilde{X}\) is a fuzzy number whose α cut is.
\(\widetilde{P}\)[c ≤ \(\widetilde{X}\) ≤ d] = \([min \{ {\int }_{a}^{b}f\left(x, \theta \right)dx |\theta \in \widetilde{\theta }\left[\alpha \right]; - {\int }_{-\infty }^{\infty }f\left(x, \theta \right)dx=1\}\)
Bounded Random Number (BRN)
For C compiler, < stdlib: h > and rand function ‘rand ()’ where used to generate random number on the interval [0, 1]:
-
Step 1: m = rand ()
-
Step 2: m ← (m = RAND MAX)
Fuzzy Uniform Distribution
A random variable s has a fuzzy uniform distribution if its probability density function (pdf) is given by:
Denote the pdf as \(\widetilde{FU}\)(\(\widetilde{a},\widetilde{b}\)), where \(\widetilde{a}\) is the lower bound fuzzy triangular number and \(\widetilde{b}\) is the upper bound fuzzy triangular number respectively.
-
Step 1: Use \(\alpha\) value
-
Step 2: Generate \({n}_{1}\) from BRN (0, 1)
-
Step 3: Return (\(\widetilde{a}\) + (\(\widetilde{b}\) −\(\widetilde{a}\))\({n}_{1}\))
3 Multi-objective Fuzzy Stochastic Bilevel Programming Problem
The standard bilevel programming problem can be stated as follows
Subject to
Subject to
where \(A=({a}_{ij})\) m x n1, \(B=({b}_{ij})\) m x n2, and \(c=({c}_{i})\) m x 1, \({a}_{1}=({a}_{1j})\) 1 x n1, \({a}_{2}=({a}_{2j})\) 1 x n1,
\({b}_{1}=({b}_{1j})\) 1 x n2, \({b}_{2}=({b}_{2j})\) 1 x n2, \({x}_{1}=({x}_{1j})\) n1 x 1, and, \({x}_{2}=({x}_{2j})\) n2 x 1\(, 1<i<m;1<j<n\),\(n={n}_{1}+{n}_{2}\).
A multi-objective probabilistic bilevel programming (MOPBLP) problem can be presented as follows:
Subject to
Subject to
where \(X\subseteq {\mathbb{R}}^{{n}_{1}}, Y\subseteq {\mathbb{R}}^{{n}_{2}}, x=({x}_{1}, {x}_{2}, \dots , {x}_{{n}_{1}})\) and \(y=({y}_{1}, {y}_{2}, \dots , {y}_{{n}_{2}})\) are the upper and lower level variables respectively.
A multi-objective fuzzy probabilistic programming (MOFPBLP) problem is an MOPBLP of the above form where one or more of the variables are fuzzy. The fuzzy variable can be present in both in objective and constraints or in objective or in constraint. The fuzzy random variables portrait the stochastic and impreciseness nature of the parameters. As real-life problems contain multiple conflicting objectives involving uncertainty, so to incorporate the uncertainty, fuzzy random variables are used to formulate the multi-objective fuzzy stochastic bilevel programming model. Depending on the nature of the problems, the uncertainty in the mathematical models can be captured using fuzzy random variables.
Different multi-objective fuzzy probabilistic bilevel programming models for single time frame are presented as follows:
3.1 Model 1
Subject to
Subject to
In Model 1, the parameters \(\left(\widetilde{{a}_{i1}^{k}}, \widetilde{{b}_{j1}^{k}}\right)\forall i, j\) in the objective and in the constraints are fuzzy random variables with \(\widetilde{{\delta }_{p}}, p=\mathrm{1,2},\dots m\) is a fuzzy random number.
3.2 Model 2
Subject to
Subject to
In Model 2, the parameters \(\left(\widetilde{{g}_{pj}}\right)\forall j~ and~ \widetilde{{c}_{p}}\) in the constraint are fuzzy random variables with \(\widetilde{{\delta }_{p}}, p=\mathrm{1,2},\dots m\) that is a fuzzy random number.
3.3 Model 3
Subject to
Subject to
In Model 3, the parameters \(\left(\widetilde{{a}_{i1}^{k}},~ and~ \widetilde{{b}_{j1}^{k}}\right)\forall i,j; ~\widetilde{{g}_{pj}}\) in the objective functions and in the constraint are fuzzy random variables. Similar objective functions can be formulated for lower level objective functions as well depending on the problem.
4 Solution Procedure
Most of the research paper are based on solution methodology to solve the bilevel problem. The difficulty part in solving bilevel programming problem is to obtain a global solution. In this paper, Model 2 has been solved by fuzzy stochastic simulation–based genetic algorithm approach. The other mathematical models can be solved similarly. In the first step, we introduce additional constraints present in the lower as fuzzy stochastic constraints in the upper level or the initial solution range for the lower level can be used from past data of the lower level as bounds. This step helps to find an easy solution for the bilevel programming problem as it creates a common constraint space under the partial cooperation between the two levels. As the decision-makers at the upper level may be well acquainted with the constraints of the lower level, taking into account the lower level constraints will reduce the complexity of the bilevel programming problem. The proposed steps can be used for general bilevel programming problem also. In the second step, we apply \(\alpha\) cut to remove the fuzziness in the constraints and then apply fuzzy inequality. Thirdly, the reformulated fuzzy simulation approach for different \(\alpha\) values is used and monitors the probability condition simultaneously to solve the model. The bracket penalty operator is used to penalize the unsatisfied constraints. Once the probability condition is met, the fitness value of the multiple objective functions is evaluated individually. For different \(\alpha\) values ranging from \(\alpha =0.1 to 0.9\) and different values for crossover operator (pc = 0.6 to 0.9) and mutation operator (pm = 0.001, 0.005, 0.008, 0.01), they are taken to obtain a set of Pareto optimal solution. The probability of mutation is very less as compared to probability of crossover because the change in phenotype occurs at a slower rate in a population. The simulation starts with \(\alpha =0.1\) and runs over different set of crossover probability and mutation probability. The solutions are stored, and the after elitism, the best solution is taken for next generation. Similarly, the simulation runs for different values of \(\alpha\). Finally, the obtained Pareto’s solutions are analyzed to select the efficient solution from it. As the multi-objective is often conflicting in nature, it becomes difficult to obtain the global solution which will satisfy both the levels. The detail procedures about the genetic algorithm are presented below. Also, a numerical example is solved using the above steps to show its feasibility.
4.1 Defuzzification
Applying the \(\alpha\) cut, the fuzzy parameters are handle in the constraints in the following manner:
Applying the fuzzy inequality, the \(\alpha\) cut of the fuzzy constraints (3.14) is expressed as follows:
Again on simplification, we get the following:
where, \({(c}_{p*},{c}_{p}^{*})\in {c}_{p}\left[\alpha \right], {(\delta }_{p*},{\delta }_{p}^{*})\in {\delta }_{p}\left[\alpha \right], p=1, 2, \dots , m\)
4.2 Fuzzy Stochastic Simulation–Based GA
Extend the algorithm presented in [111] to solve the multi-objective fuzzy probabilistic bilevel programming problem.
The pseudo code and the parameters used in the algorithm are described below:

Fuzzy Probabilistic Genetic Algorithm
4.3 Initialization of the Population
A probable solution of population is generated and initialized. If \(({x}_{1}, {x}_{2}, \dots , {x}_{n})\) be the decision variables, then the corresponding chromosome can be expressed as \({X}_{p}=({x}_{1 }, {x}_{2}, \dots {,x}_{n})\) p, where\(p=\mathrm{1,2},\dots , p\_size\), where \(p\_size\) indicates population size. The user selectable parameter \(p\_size\) is crucial for searching the domain space. Usually a value 0 and the upper limit of the decision variables are chosen for\({x}_{i}(i=\mathrm{1,2},\dots , n)\).
4.4 Handling Fuzzy Stochastic Constraints:
Consider the below fuzzy probabilistic constraints:
Applying the \(\alpha\)-cut and inequality conditions, the above expression reduces to
The inequality above can be express as follows:
where \(s=({c}_{1}, {c}_{2}, \dots , {c}_{m})\) is an m-dimensional continuous probability distribution, with the decision variable \(x=({x}_{1}, {x}_{2}, \dots , {x}_{{n}_{1}}; {y}_{1}, {y}_{2}, \dots , {y}_{{n}_{2}})\). Next, generating \(N\) number of independent random variables as \({s}^{r}=\left({c}_{1}^{r}, {c}_{2}^{r}, \dots , {c}_{m}^{r}\right), r=\mathrm{1,2},\dots , N\).
Assuming \({N}_{i}\left(\le N\right), i=\mathrm{1,2},\dots , n\), and noting the number of times, the following relation is satisfied:
Then, according to the definition of probability, (4.7) will hold if \(\left(\frac{{N}_{i}}{N}= {a}_{p}^{*}\right),p=\mathrm{1,2},\dots ,m\).
4.5 Fitness Value
The objective functional value which meets the constraints criteria is known as fitness value. In multi-objective programming, each objective function’s fitness value is calculated and based on fitness value the objective function are sorted.
4.6 Selection Method
The robust selection method known as Binary Tournament Selection (BTS) based on chromosome fitness value is used to select chromosomes from the population. Choose j potential chromosomes from the pool of chromosomes, compare their fitness, and then sort the set of chromosomes based on their fitness values in decreasing order. The victors are chosen for mating. This method is rehashed until the required number of individuals are accomplished. The tournament size k controls the selection process. The tournament selection process is known as BTS if the tournament size is 2. The acquired individuals by this method is treated as new population species with same p size as the initial population.
4.7 Crossover Operator
The genetic operator called crossover is used to vary the individuals from one generation to next generation. A crossover point is selected by generating a random number r over the open interval (0, 1) for every pair of chromosomes. Denoting the crossover probability as pc, if \(r \le pc\), then the given pair is selected for crossover.
4.8 Mutation Operator
To alter the sequence in the chromosomes, mutation operator is used which helps in varying the population from one generation to another. If the change is done bitwise in a sequence of chromosomes, it is known as bitwise mutation. A mutation point is selected by generating a random number ‘\(r_{1}\)’ over the open interval (0, 1) for every pair of chromosomes. Denoting the mutation probability as pm, if \(r_{1} \le pm\), then the given pair is selected for mutation.
4.9 Termination
After attaining the needed accuracy or running the maximum generation the algorithm terminates.
5 Numerical Example
To illustrate the feasibility of the solution approach, consider the following numerical example [65]:
Subject to
Subject to
The above problem can be formulated as follows:
Subject to
Subject to
where, \({r}_{1i}, {r}_{2i},{r}_{3i}\) follows fuzzy uniform distribution with \(\widetilde{FU}\left(\widetilde{a},\widetilde{b}\right)=\widetilde{FU}(\widetilde{-2}, \widetilde{-5})\), \(\widetilde{FU}\left(\widetilde{a},\widetilde{b}\right)=\widetilde{FU}(\widetilde{10}, \widetilde{14})\), \(\widetilde{FU}\left(\widetilde{a},\widetilde{b}\right)=\widetilde{FU}\left(\widetilde{-1}, \widetilde{-5}\right), \widetilde{0.95}=\left(\mathrm{0.93,0.95,0.97}\right),\) \(\widetilde{0.92}=\left(\mathrm{0.90,0.92,0.94}\right), \widetilde{0.94}=(\mathrm{0.92,0.94,0.96})\)that are fuzzy triangular numbers.
The solution obtained by proposed solution procedure is equally efficient as compared to [65] for all \(\alpha\) values, i.e., if we compare the value of x and y in both the papers, then it is the same or almost same. For example, the value of x and y in [112] is 3 and 1.5 respectively, whereas, in this paper, one of the solutions is 3 and 1.5 respectively. Equations (5.14), (5.15), and (5.16) are added to the upper level not exactly as in the lower level, but as a fuzzy probabilistic constraints. This step plays a key role in solving the multi-objective bilevel programming problem by creating a common constraints space for both the levels. It also emphasizes on giving importance to the lower level constraints while solving the upper level problem. The partial cooperation is highlighted between both the levels which plays a key role in solving management problems. In Zheng et al., the result focuses mainly was on the upper level, but in this research paper, importance are given to both the levels, i.e., the primary focused on [112], and in general is given to upper level, but in this paper, both the levels are given importance.
The crossover probability \(pc\) and the mutation probability \(pm\) in genetic algorithm were varied from 0.6 to 0.9 and 0.001 to 0.08 respectively.
The diagrammatic representation of the comparison of the both the optimal values is provided in the Fig. 1 below.

A simplified version of the above numerical example is solved using the software GAMS 45.5.0 version (Academic license) taking the objective functions \({Z}_{1}\) and \({Z}_{3}\) in the upper and lower level respectively. The values of the decision variables obtained are \(x=3~and~y=0\) with the objective function value as − 3 and 0 respectively. These values throw light on the effect of decision variable obtained of one level onto the other. The upper bound for the decision variables were \(x=3\) and \(y=10\); however, taking different values for \(y\) did not improve the solution. In addition, changing the objective function from maximizing to minimizing yielded a different result. The values of the decision variables thus obtained are \(x=3~and~y=0\) using extended mathematical programming (EMP) and \(x=3~and~y=1.5\) manually. Table 3 gives the detail of the solution obtained using GAMS software for maximizing problem.
Clearly, we see that constraints 3 and 4 are not utilized in its full sense, which indicates that the solution can be improved further.
6 Conclusion and Discussion
A bilevel programming is an NP hard problem with many real-world applications. Therefore, to find better and efficient solution is a challenging task. Many methods and algorithms were developed to obtain the global solution which will satisfy both the levels. Single objective functions are studied well, and solution methodology for the bilevel programming is developed. But, in case of multi-objective with conflicting nature at both the levels, still remains an interesting problem. Thus, in this line, a novel solution procedure is presented to solve bilevel programming problem and is implemented in solving a multi-objective fuzzy stochastic bilevel programming problem using genetic algorithm. In this paper, the concept of partial cooperation has been implemented by converting the non-fuzzy stochastic constraints of the lower level as a fuzzy stochastic constraints and added to the upper level. This step provides a common constraint space for both the levels and also highlights the importance of partial cooperation in solving management problems. As the decision-makers at the upper level may be well acquainted with the constraints of the lower level. Taking into account the lower level constraints will reduce the complexity of the bilevel programming problem. The model formulated to solve bilevel programming problem can be implemented in any bilevel problem to obtain the optimum solution and/or Pareto solutions. Comparing the Pareto solution of the numerical example shown in Table 1 to the optimal solution of the publication [112], which is shown in Table 2, reveals that the former is optimal. The only difficulty lies with the proposed solution procedure is to get the past data or information of the lower level which may not be possible in all cases and as the number of variables increases the complexity will also multiply. As multi-level programming is a decentralized planning problem and bilevel is a special case of it, therefore being a real-life model, the proposed can be implemented in any policy-making problems, supply-chain problems, network problems and further extended to transportation problem, transshipment problem, inventory problem, agricultural problem, etc. This work can be further develop to include competition strategies into a single mathematical model where at present only uncertainty is incorporated. Depending on the problem, such mathematical models can be developed which include both uncertainty and competition under one frame with possible different time frame.
Data Availability
The data that support the findings of this study are incorporated in the paper.
References
Bracken J, McGill JT (1973) Mathematical programs with optimization problems in the constraints. Oper Res 21(1):37–44
Bard JF (1991) Some properties of the bilevel linear programming. J Optim Theory Appl 68:371–378
Ben-Ayed O, Blair O (1990) Computational difficulty of bilevel linear programming. Oper Res 38:556–560
Jeroslow R (1985) The polynomial hierarchy and a simple model for competitive analysis. Math Program 32:146–164
Candler W, Norton R (1977) Multi-level programming and development policy. The World Bank
HeinrichVS (1952)The theory of the market economy. William Hodge
Colson B, Marcotte P, Savard G (2007) An overview of bilevel optimization. Annals Oper Res 153(1):235–256
Bard JF (2013) Practical bilevel optimization: algorithms and applications. Springer Sci Busi Media30
Stephan D (2002) Foundations of bilevel programming. Springer Sci Busi Media
Ying Li, Yang S (2007) Fuzzy bi-level multi-objective programming for supply chain.2007 IEEE International Conference on Automation and Logistics. IEEE:2203–2207
Bialas WF, Karwan MH (1982) On two-level linear optimization. IEEE Transaction Automatic Control 27:221–214
Candler W, Townsley R (1982) A linear bilevel programming problems. Comput Oper Res 9:59–76
Fortuny-Amat J, McCarl B (1981) A representation and economic interpretation of a two-level programming problem. J Oper Res Soc 32(9):783–792
Moore JT, Bard JF (1990) The mixed integer linear bilevel programming problem. Oper Res 38(5):911–921
Marcotte P, Zhu DL (1996) Exact and inexact penalty methods for the generalized bilevel programming problem. Math Program 74(2):141–157
Zhu DL, Xu Q, Lin Z (2004) A homotopy method for solving bilevel programming problem. Nonlinear Anal: Theory Method Appl 57(7):917–928
Muu LD, Van Quy N (2003) A global optimization method for solving convex quadratic bilevel programming problems. J Glob Optim 26(2):199–219
Lv Y, Hu T, Wang G, Wan Z (2007) A penalty function method based on Kuhn-Tucker condition for solving linear bilevel programming. Appl Math Comput 188(1):808–813
Sinha A, Malo Deb PK (2013) Efficient evolutionary algorithm for single-objective bilevel optimization.arXiv preprint arXiv:1303.3901
Sinha A, Malo P, Deb K (2012) Unconstrained scalable test problems for single-objective bilevel optimization.2012 IEEE Congress Evol Comput IEEE: 1–8
Ruuska S, Miettinen K, Wiecek MM (2012) Connections between single-level and bilevel multiobjective optimization. J Optim Theory Appl 153:60–74
Wen U-P, Hsu S-T (1991) Linear bi-level programming problems—a review. J Oper Res Soc 42:125–133
Ye JJ (2011) Necessary optimality conditions for multiobjective bilevel programs. Math Oper Res 36(1):165–184
Pieume CO et al (2013) Generating efficient solutions in bilevel multi-objective programming problems. Am J Oper Res 3(2):289
Elsisy MA, El Sayed MA, Abo-Elnaga Y (2021) A novel algorithm for generating Pareto frontier of bi-level multi-objective rough nonlinear programming problem. Ain Shams Eng J 12(2):2125–2133
Abo-Sinna MA, Baky IA (2007) Interactive balance space approach for solving multi-level multi-objective programming problems. Info Sci 177(16):3397–3410
Farahi MH, Ansari E (2010) A new approach to solve Multi-objective linear bilevel programming problems. J Math Comput Sci 1(4):313–320
Jana R, Biswal M (2006) Genetic based fuzzy goal programming for multi objective chance constrained programming problems with continuous random variables. Int J Comput Math 83(02):171–179
Ahmad I et al (2018) A linear bi-level multi-objective program for optimal allocation of water resources. PLoS ONE 13(2):e0192294
Gang J et al (2015) A multi-objective bi-level location planning problem for stone industrial parks. Comput Oper Res 56:8–21
Karimi H, Jadid S, Saboori H (2019) Multi-objective bi-level optimisation to design real-time pricing for demand response programs in retail markets. IET Generation, Transmission & Distribution 13(8):1287–1296
Sinha A, Malo P, Deb K (2015) Transportation policy formulation as a multi-objective bilevel optimization problem.2015 IEEE Congress Evol Comput (CEC). IEEE:1651–1658
Lachhwani K, Dwivedi A (2018) Bi-level and multi-level programming problems: taxonomy of literature review and research issues. Arch Comput Methods Eng 25:847–877
Arora SR, Gupta R (2009) Interactive fuzzy goal programming approach for bilevel programming problem. Eur J Oper Res 194(2):368–376
Chen L-H, Chen H-H (2013) Considering decision decentralizations to solve bi-level multi-objective decision-making problems: a fuzzy approach. Appl Math Model 37(10–11):6884–6898
Nath MB, Pal BB (2002) A fuzzy goal programming approach for solving bilevel programming problems. AFSS International Conference on Fuzzy Systems. Berlin, Heidelberg: Springer Berlin Heidelberg: 91–98
Shih H-S, Lai Y-J, Stanley LE (1996) Fuzzy approach for multi-level programming problems. Comput Oper Res 23(1):73–91
Sakawa M, Nishizaki I (2002) Interactive fuzzy programming for decentralized two-level linear programming problems. Fuzzy Set Syst 125(3):301–315
Pramanik S, Banerjee D, Giri BC (2012) Chance constrained linear plus linear fractional bi-level programming problem. Int J Comput Applic 56(16)
Gao Y, Zhang G, Ma J, Lu J (2010) A-cut and goal-programming-based algorithm for fuzzy-linear multiple-objective bilevel optimization. Fuzzy Systems, IEEE Transactions on 18(1):1–13
Emam OE (2006) A fuzzy approach for bi-level integer non-linear programming problem. Appl Math Comput 172(1):62–71
Pramanik S, Dey PP (2011) Quadratic bi-level programming problem based on fuzzy goal programming approach. Int J Softw Eng Appl 2(4):41
Pramanik S (2012) Bilevel programming problem with fuzzy parameters: a fuzzy goal programing approach. J Appl Quant Methods 7(1):9–24
Pal BB, Gupta S (2012) A genetic algorithm-based fuzzy goal programming approach for solving fractional bilevel programming problems. Int J Oper Res 14(4):453–471
Pal BB, Chakraborti D (2013) Using genetic algorithm for solving quadratic bilevel programming problems via fuzzy goal programming. Int J Appl Manag Sci 5(2):172–195
Mishra S, Ghosh A (2006) Interactive fuzzy programming approach to bi-level quadratic fractional programming problems. Ann Oper Res 143:251–263
Dempe S, Kalashnikov V, Pérez-Valdés GA, Kalashnykova N (2015) Bilevel programming problems.Energy Systems. Springer, Berlin 10:978–976
Sinha A, Malo P, Deb K (2017) A review on bilevel optimization: From classical to evolutionary approaches and applications. IEEE Trans Evol Comput 22(2):276–295
Holland JH (1975) Adaptation in natural and artificial systems: an introductory analysis with applications to biology, control, and artificial intelligence, U Michigan Press
Liu B, Iwamura K (2001) Fuzzy programming with fuzzy decisions and fuzzy simulation based genetic algorithm. Fuzzy Set Syst 122(2):253–262
Mathieu R, Pittard L, Anandalingam G (1994) Genetic algorithm based approach to bi-level linear programming. RAIRO-Oper Res 28(1):1–21
Setak Mostafa et al (2019) A bi-level stochastic optimization model for reliable supply chain in competitive environments: Hybridizing exact method and genetic algorithm. Appl Math Model 75:310–332
Hejazi SR, Memariani A, Jahanshanloo G, Sepehri MM (2001) Linear bilevel programming solution by genetic algorithm. Comput Oper Res 29:1913–1925
Yang J, Zhang M, He B, Yang C (2009) Bi-level programming model and hybrid genetic algorithm for flow interception problem with customer choice. Comput Math Appl 57(11):1985–1994
Yin Y (2000) Genetic-algorithms-based approach for bilevel programming models. J Transp Eng 126(2):115–120
Deb K (2001) Nonlinear goal programming using multi-objective genetic algorithms. J Oper Res Soc 291–302
Jana R, Biswal M (2004) Stochastic simulation-based genetic algorithm for chance constraint programming problems with continuous random variables. Int J Comput Math 81(9):1069–1076
Dutta S, Acharya S, Mishra R (2016) Genetic algorithm based fuzzy stochastic transportation programming problem with continuous random variables. OPSEARCH 1–38
Dutta S, Sahoo B, Mishra R, Acharya S (2016) Fuzzy stochastic genetic algorithm for obtaining optimum crops pattern and water balance in a farm. Water Res Manag 1–27
Calvete HI, Gale C, Mateo PM (2008) A new approach for solving linear bilevel problems using genetic algorithms. Eur J Oper Res 188(1):14–28
Deb K, Sinha A (2010) An efficient and accurate solution methodology for bilevel multi-objective programming problems using a hybrid evolutionary-local search algorithm. Evol Comput 18(3):403–449
Mathieu R, Pittard L, Anandalingam G (1994) Genetic algorithm based approach to bi-level linear programming. Revue francaise d'automatique, d'informatique et de recherche operationnelle. Recherche Operationnelle 28(1):1–21
Wang YP, Jiao YC, Li H (2005) An evolutionary algorithm for solving nonlinear bilevel programming based on a new constraint-handing scheme. IEEE Transactions on Systems Man and Cybernetics: Part C 35(2):221–232
Sakawa M, Matsui T (2013) Interactive fuzzy programming for stochastic two-level linear programming problems through probability maximization. Artif Intell Res 2(2):109–124
Kuo RJ, Han YS (2011) A hybrid of genetic algorithm and particle swarm optimization for solving bi-level linear programming problem–a case study on supply chain model. Appl Math Model 35(8):3905–3917
Bagloee SA et al (2018) A hybrid machine-learning and optimization method to solve bi-level problems. Expert Syst Appl 95:142–152
Gao Y, Zhang, G, Lu J (2008) A particle swarm optimization based algorithm for fuzzy bilevel decision making. Fuzzy Systems, 2008. FUZZ-IEEE 2008. (IEEE World Congress on Computational Intelligence). IEEE International Conference on, IEEE 1452–1457
Ma W, Wang M, Zhu X (2014) Improved particle swarm optimization based approach for bilevel programming problem-an application on supply chain model. Int J Mach Learn Cybern 5(2):281–292
Lv Y, Hu T, Wang G, Wan Z (2008) A neural network approach for solving nonlinear bilevel programming problem. Comput Math Appl 55(12):2823–2829
Wan Z, Wang G, Sun B (2013) A hybrid intelligent algorithm by combining particle swarm optimization with chaos searching technique for solving nonlinear bilevel programming problems. Swarm Evol Comput 8:26–32
Labb’e M, Marcotte P, Savard G (1998) A bilevel model of taxation and its application to optimal highway pricing. Manag Sci 44(12-part-1):1608– 1622
Côté J-P, Marcotte P, Savard G (2003) A bilevel modelling approach to pricing and fare optimization in the airline industry. J Revenue Pricing Manag 2(1):23–36
Arroyo JM, Galiana FD (2005) On the solution of the bilevel programming formulation of the terrorist threat problem. Power Systems, IEEE Transactions on 20(2):789–797
Aghapour H, Osgooei E (2022) A novel approach for solving the fully fuzzy bi-level linear programming problems. J Ind Syst Eng 14(1):221–237
Davoudi N, Hamidi F, Nehi HM (2022) Solving fuzzy bilevel linear programming problem based on interval approximation. In2022 9th Iranian Joint Congress on Fuzzy and Intelligent Systems (CFIS) IEEE on 1–3
Kausar H, Adhami AY, Rahman A (2021) Quadratic fractional bi-level fuzzy probabilistic programming problem when bi follows exponential distribution.Reliability: Theory Applic 16(62):289–300
Li H, Li H (2022) GA/PD: a genetic algorithm based on problem decomposition for solving interval linear bilevel programming problems.Eng Optim 1–16
Singh VP, Sharma K, Chakraborty D, Ebrahimnejad A (2022) A novel multi-objective bi-level programming problem under intuitionistic fuzzy environment and its application in production planning problem. Complex Intell Syst 8(4):3263–3278
Vallejo C, Fernando J, Corpus C, Villegas JG (2023) Metaheuristics for bilevel optimization: a comprehensive review.Comput Oper Res 106410
Mohan C, Nguyen H (1997) A fuzzifying approach to stochastic programming. OPSEARCH-NEW DELH 34:73–96
Luhandjula M (1996) Fuzziness and randomness in an optimization framework. Fuzzy Set Syst 77(3):291–297
Acharya S, Biswal MP (2011) Solving probabilistic programming problems involving multi-choice parameters. Opsearch 48(3):217–235
Acharya S, Ranarahu N, Dash J, Acharya M (2014) Solving multi-objective fuzzy probabilistic programming problem. J Intell Fuzzy Syst 26(2):935–948
Acharya S, Ranarahu N, Dash JK, Acharya MM (2014) Computation of a multi-objective fuzzy stochastic transportation problem. Int J Fuzzy Comput Model 1(2):212–233
Aiche F, Abbas M, Dubois D (2013) Chance-constrained programming with fuzzy stochastic coefficients. Fuzzy Optim Decis Making 12(2):125–152
Mousavi SM, Jolai F, Tavakkoli-Moghaddam R (2013) A fuzzy stochastic multi-attribute group decision-making approach for selection problems. Group Decis Negot 22(2):207–233
Sakawa M, Nishizaki I, Katagiri H (2011) Fuzzy stochastic multi objective programming. Springer Sci Busi Media159
Wang S, Watada J (2012) Fuzzy stochastic optimization: theory, models and applications. Springer Sci Busi Media
Li Y, Liu J, Huang G (2014) A hybrid fuzzy-stochastic programming method for water trading within an agricultural system. Agric Syst 123:71–83
Gao X (2022) A bi-level stochastic optimization model for multi-commodity rebalancing under uncertainty in disaster response. Ann Oper Res 319(1):115–148
Muñoz MA, Pineda S, Morales JM (2022) A bilevel framework for decision-making under uncertainty with contextual information.Omega108:102575
MohammadaliN et al (2022) Bi-level fuzzy stochastic-robust model for flexibility valorizing of renewable networked microgrids.Sustainable Energy, Grids and Networks31:100684
Partovi F, Seifbarghy M, Esmaeili M (2023) Revised solution technique for a bi-level location-inventory-routing problem under uncertainty of demand and perishability of products.Appl Soft Comput 133:109899
Abo-Elnaga Y, Nasr S (2020) Modified evolutionary algorithm and chaotic search for Bilevel programming problems. Symmetry 12(5):767
Abo-Elnaga Y, Nasr S (2022) K-means cluster interactive algorithm-based evolutionary approach for solving bilevel multi-objective programming problems. Alexandria Eng J 61(1):811–827
Haghifam S et al (2022) A two-stage stochastic bilevel programming approach for offering strategy of DER aggregators in local and wholesale electricity markets. IET Renew Power Gener 16(13):2732–2747
Lv J, Peng Z, Wan Z (2024) Approximate Karush-Kuhn-Tucker condition for multi-objective optimistic bilevel programming problems. J Industr Manag Optim 20(1):270–299
Garg H, Thanh DNH, Rizk-Allah RM (2023) VIKOR approach for bi-level multi-criteria nonlinear fractional programming problems: new insights. Kybernetes 52(10):4375–4400
Maiti I, Mandal T, Pramanik S (2023) A goal programming strategy for bi-level decentralised multi-objective linear programming problem with neutrosophic numbers. Int J Appl Manag Sci 15(1):57–72
Fatemeh M, Sadeghi H (2022) On solving uncooperative linear bilevel multi-follower programming problems.Pakistan J Stat Oper Res 1–12
Yuhui L, Zhang L (2022) An evolutionary algorithm driven by correlation coefficients to solve nonlinear integer bilevel programming problems.2022 21st Int Symp Commun Info Technol (ISCIT). IEEE:256–262
Altınkaynak B et al (2022) Comparison of fuzzy solution approaches for a bilevel linear programming problem.international conference on theory and applications of fuzzy systems and soft computing. Cham: Springer Nature Switzerland
Peijun G, Zhu X (2023) Focus programming: a bi‐level programming approach to static stochastic optimization problems.Int Transact Oper Res
Goshu NN, Kassa SM (2022) Stochastic bilevel programming with multiple followers: a solution approach using the systematic sampling evolutionary method. Eng Optim 54(6):1059–1072
Wang Y et al (2022) Distributed ANN-bi level two-stage stochastic fuzzy possibilistic programming with Bayesian model for irrigation scheduling management. J Hydrol 606:127435
Cheng Y et al (2022) An improved fuzzy sorting algorithm coupling bi-level programming for synergetic optimization of agricultural water resources: a case study of Fujian Province. J Environ Manag 312:114946
Lai Y-J, Hwang C-L (1992) A new approach to some possibilistic linear programming problems. Fuzzy Set Syst 49(2):121–133
Buckley JJ (2005) Fuzzy probabilities: new approach and applications. Springer Sci Busi Media115
Nanda S, Kar K (1992) Convex fuzzy mappings. Fuzzy Set Syst 48(1):129–132
Buckley JJ, Eslami E (2004) Uncertain probabilities ii: the continuous case. Soft Comput 8(3):193–199
Dutta S, Biswal M, Acharya S, Mishra R (2018) Fuzzy stochastic price scenario based portfolio selection and its application to BSE using genetic algorithm. Appl Soft Comput 62:867–891
Zheng Y, Wan Z, Wang G (2011) A fuzzy interactive method for a class of bilevel multiobjective programming problem. Expert Syst Appl 38(8):10384–10388
Acknowledgements
The authors are thankful to both the reviewers for their valuable time and comments to improve the quality of the research article.
Author information
Authors and Affiliations
Contributions
A-The solution procedure is developed using genetic algorithm, preparing the manuscript, running fuzzy simulation code in C++ language. A, B - Technique to handle fuzzy stochastic constraint using defuzzification in the both the levels i.e., the lower and the upper level respectively. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Ethics Approval
We have followed all the rules stated in the Ethical Responsibilities of Authors section of the journal.
Consent for Publication
We consent to the publication of this manuscript with the rules of the journal.
Competing Interest
The authors declare no competing interests.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Dutta, S., Acharya, S. A Novel Approach to Solve Multi-objective Fuzzy Stochastic Bilevel Programming Using Genetic Algorithm. Oper. Res. Forum 5, 11 (2024). https://doi.org/10.1007/s43069-024-00294-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s43069-024-00294-z