
Abstract
The skewness coefficient (G) of the generalized logistic (GLO) distribution is a function of its shape parameter (a) only. Both the methods of probability-weighted moments and maximum-likelihood (ML) mostly yield magnitudes for the shape parameter much different from that by the method of moments, the gap narrowing with increasing length of the sample series. The computation of ML parameters by the conventional Newton–Raphson method is problematic with no solution for a non-negligible number of sample series. Here, the three-step Newton–Raphson algorithm, which was previously proposed for the generalized extreme values distribution, is adapted to the GLO distribution, and on many recorded annual flood peaks and annual maximum rainfalls series and through a comprehensive Monte-Carlo experiment it is shown to improve the rate of convergent solutions considerably.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The generalized logistic (GLO) distribution has been one of the widely used distributions for frequency analyses of annual flood peaks (AFPs) and other hydrologic extremes like annual maximum rainfalls (AMRs) (e.g., [1,2,3], Seckin et al. 2010, [4]). Mostly, the generalized extreme values (GEV), GLO, Pearson-3, log-Pearson-3, and 3-parameter log-normal (LN3) distributions turn out to be more suitable to fairly long recorded series of AFPs and AMRs. GLO has been used for other random phenomena encountered in demography, agriculture, and economics, also (e.g., [5, 6]).
While there are quite a few potential probability distributions deemed suitable for the frequency analyses of either AFPs or AMRs series, there exist yet a few different methods for estimation of distribution parameters out of the available sample series, which mostly have record lengths as long as 100 years even in the developed countries. Among these methods, the classical moments (Moments), probability-weighted moments (PWMs) (or equally, L-Moments), and maximum-likelihood (ML) are widely used (e.g., [1]). Because there may result large differences in magnitudes of right-tail quantiles calculated by the same probability distribution whose parameters are computed by different methods, any distribution whose parameters are computed by a different method is actually a different distribution.
The procedural steps of the ML method to maximize the logarithm of the likelihood function of the distribution using the data of the available sample series are analytically and numerically demanding and yet with a serious disadvantage of taking futile and deadlocked paths with no results for some short series (e.g., [1], Hosking et al. [7], Prescott and Walden [8], Wilks [9]). For example, Khamnei and Abusaleh [6] in applying the ML method to the GLO distribution first make the value of the location parameter zero and next solve for the scale and shape parameters. Alkasasbeh and Raqab [5] also used the 2-parameter version of the GLO distribution by forcing the location parameter to be zero in computing the parameters by the ML method along with five other methods. Shao [10] examined the existence of ML estimates for the three parameters of the GLO distribution analytically.
The objective of this study is to adapt the three-step Newton–Raphson algorithm, which was proposed for the generalized extreme values distribution [11], to the generalized logistic distribution, and to verify first on series of AFPs and AMRs recorded in Turkey and the America, and next by detailed Monte-Carlo experiments that the three-step Newton–Raphson algorithm brings about a considerable improvement over the conventional Newton–Raphson procedure for convergent solutions.
2 Brief Review About the Generalized Logistic (GLO) Distribution
The probability density (pdf), cumulative distribution (cdf), and quantile functions (qf) of the generalized logistic distribution are (e.g., [12]):
a, b, c are the shape, scale, and location parameters in these equations. Because both the cdf and the qf are analytically available, the GLO distribution does not require either a special table or a special computer program for computation of the quantile ↔ probability of non-exceedence (x ↔ Pnex) relationships both ways. The skewedness of the pdf of the GLO distribution is determined directly by the shape parameter, and hence, the skewness coefficient (G) is a function of the shape parameter (a) only.
3 Parameters of the GLO Distribution by the Method of Moments
The analytical relationships among the parameters of the GLO distribution and the mean (µ), variance (σ2), and skewness coefficient (G) are (e.g., [1]):
Equation (7) is valid when the shape parameter is within the range of –1/3 < a < + 1/3. Initially, Eq. (7) is solved for the shape parameter (a) replacing G by its unbiased estimate SC computed using the n-element sample series. Next, the scale (b) and the location parameters (c) are computed first by Eq. (6) and next by Eq. (5), substituting the sample mean for μ and the sample variance for σ2. Here, for the numerical values of the complete gamma function: Γ(argument), the subprogram given in the book by Press et al. [13] is used. The solution of the root of Eq. (7) is done by the Secant iterative method after having determined a fairly narrow interval of the shape parameter within (–1/3 < a < + 1/3) which makes the right-hand side of Eq. (7) change sign.
4 Parameters of the GLO Distribution by the Method of Probability-Weighted Moments
The analytical relationships among the parameters of the GLO distribution and the L-moments are (e.g. [1, 12]):
In these equations, the L-moments (λj’s) are defined as:
where, PWM1 and PWM2 are the 1st and 2nd probability-weighted moments of the distribution, which are defined as:
Here, l.b. and u.b. are the lower and upper bounds of the random variable x. Because the parameters are not known at the beginning, the estimates of both the PWM1 and PWM2 are made from the available sample series by approximating the probability of non-exceedence of the i’th element (F(x = xi) ≈ pnexi) by a suitable formula. In this study, as suggested by Landwehr et al. [14], the sample probability-weighted moments are computed by:
Here, the summations are from i = 1 (the 1st element) to i = n (the last element) of the sample series, where i is the rank number of the i’th element (xi) of the series arranged in ascending order.
5 Parameters of the GLO Distribution by the Maximum-Likelihood Method and Solution by the Conventional Newton–Raphson Algorithm
Inserting the right hand side of Eq. (1) by substituting xi for x in the log-likelihood function (LLF) of the generalized logistic distribution, the below equation results:
Here, yi is as defined by Eq. (3) by substituting xi for x, xi being the i’th element of the observed sample series which has a total of n elements, and, the summations are from i = 1 to i = n, x1 and xn being the values of the first and the last elements in the sample series.
To determine those magnitudes for the parameters which make the LLF maximum, the system of three simultaneous equations formed by equating each partial derivative of the LLF with respect to each parameter to zero is solved for the parameters. Skipping the intermediate steps, these three equations for the GLO distribution are:
where, ∂yi/∂a is:
where, ∂yi/∂b is:
where, ∂yi/∂c is:
Starting out with reasonable initial estimates for the three parameters, the system of three linear equations, whose coefficient matrix is the Jacobian matrix formed by the nine partial derivatives of the right-hand sides of the three nonlinear equations expressed by Eqs. (15) through (20), are solved for increments of the three coefficients (∆ai, ∆bi, ∆ci) during each iteration and the improved estimates are computed by:
For a convergent solution, the iterations terminate when all of the three absolute relative differences are sufficiently small, which are defined by the inequalities given as follows:
where, M is taken as large as 6 (6 significant digits), which is good enough for most real-life problems.
Because the analytical forms of the three equations: ∂LLF/∂a = 0, ∂LLF/∂b = 0, ∂LLF/∂c = 0 are already considerably long and involved, we have refrained from analytically taking altogether nine partial derivatives, and instead we have numerically computed them by the first order differentiation formulae, hence making a lot of savings from analytically long expressions.
6 Maximum-Likelihood Parameters of the GLO Distribution by the Three-Step Newton–Raphson Algorithm
The three-step Newton–Raphson (N-R) algorithm was suggested by Haktanir [11] for the GEV distribution. Here, we are applying the three-step N-R algorithm to the GLO distribution. The approach of the three-step N-R algorithm can be summarized as follows. Because the relative differences of the magnitudes of both the scale and the location parameters by the ML and PWMs methods are much smaller than the relative difference of the shape parameter, initially it is assumed that both the scale and the location parameters are constants and their magnitudes by the PWMs method are assigned to them. This makes Eq. (15) along with Eq. (16) a single equation having one unknown, the shape parameter. Then, Eq. (15) is solved for the shape parameter in two stages. In the first one, the value given by the method of PWMs for the shape parameter is taken as the initial estimate. All of the arguments of n number of ln[1– a∙(xi–c)/b] terms in Eq. (16) are checked whether they are all positive real. As a1 symbolizes the initial estimate of a, a2 is taken as 1.01*a1, and the Secant iterative method is used to solve for the root of ∂LLF/∂a = 0 to four significant digits. If any of the arguments of n ln[1– a∙(xi–c)/b] terms in Eq. (16) turns out to be negative with the PWMs magnitude of the shape parameter, then the initial estimate is searched in the set: (− 1.0, − 0.95, − 0.90, …, − 0.40, − 0.38, − 0.36, …, − 0.02, − 0.01, − 0.001, 0.001, 0.01, 0.02, …, 0.40, 0.45, 0.50, …, 1.00) which will make the left-hand side of Eq. (15) (∂LLF/∂a) change sign. It is observed with 62 sample series of annual flood peaks recorded in Turkey, 12 such series recorded in America, and 2156 sample series of annual maximum rainfalls recorded in Turkey that the end value of so many a parameters is − 0.67 while the majority fall in the range: − 0.4 ≤ a ≤ + 0.1. Therefore, the interval of − 1.0 ≤ a ≤ + 1.0 should be sufficient to comprise the root of ∂LLF/∂a = 0. Next, the bisected value of these two a’s is taken as the initial estimate. And again, the root to four significant digits is computed by the Secant iterative method. Next, taking this value for the shape parameter and the PWMs magnitude for the location parameter as constants in Eq. (17) together with Eq. (18), Eq. (17) is solved for the scale parameter, b, to four significant digits again by the Secant method taking the PWMs magnitude of b as the initial estimate. Next, taking the recent values of the shape and the scale parameters as constants in Eq. (19) together with Eq. (20), Eq. (19) is solved for the location parameter, c, to four significant digits again by the Secant method taking the PWMs magnitude of c as the initial estimate. This completes the first cycle. A second cycle of solving Eqs. (15), (17), and (19) individually in this order is done once again with the recent values of the other two parameters treated as constants. At the end of this second cycle, the recent values of all three parameters are used as initial estimates and the set of three nonlinear equations, which are Eqs. (15), (17), and (19) are solved simultaneously by the algorithm of the conventional N-R method summarized above. This a little winding way always improves the chance of convergence for the ML method. Yet, the total amounts of the intermediate iterations are just a few, and they consume very little execution time of a few split seconds.
Our experience has indicated that the magnitudes of the location and scale parameters of the GLO distribution by the methods of Moments, ML, and PWMs are fairly close to each other, whereas the magnitudes of the shape parameter are far apart. Although the conceptual and hence analytical approaches of the methods of PWMs and ML are quite different from each other, the difference in magnitudes of the shape parameters by these two methods is smaller than that in magnitudes by the ML and Moments methods. For example, the values of the GLO parameters with the sample series of annual flood peaks (AFPs) recorded at the gaging station of Seymour on the East Fork White River given in Table 9.2.1 in the book by Rao and Hamed [1] are presented in Table 1.
There are 12 sample series of AFPs of lengths between 30 and 85 elements recorded on various natural streams in America given in tables all over the book by Rao and Hamed [1] for their examples. These 12 series are among the material used in this study. The three-step N-R algorithm applied here to the GLO distribution on these 12 series has become successful on 11 of them, and it has failed with the 36-element AFP series at Salt Creek near Harrodsburg in Indiana (Table 1.8.3. in [1]), while the conventional N-R algorithm has been successful on nine of these series. The averages of 11 absolute relative differences (ARDs) of the three parameters computed by the ML method from those computed by the Moments and PWMs methods are given in Table 2 .
Other than these 12 AFPs series from America, 62 AFPs series recorded on many natural streams in Turkey whose lengths vary from 36 to 76 elements with an average of 54 also are used as the material of this study. These data are retrieved from the Gauged Streamflow Yearbooks of the General Directorate of State Water Works of Turkey (DSI 1935–2011) [15]. Table 3 presents some concise information about these series of AFPs observed at gaging stations which do not have a dam upstream on various natural streams in Turkey.
The parameters of the GLO distribution are computed by the methods of (1) Moments, (2) PWMs, (3) ML by the conventional N-R algorithm, and (4) ML by the three-step N-R algorithm on all of these 62 AFPs series. The three-step N-R algorithm has been successful on 58 of them, and the averages of 58 ARDs of all the three parameters computed by the ML method from those of the Moments and PWMs parameters are given in Table 4.
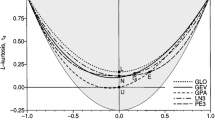
Table 5 gives the magnitudes of the elements in m3/s of the series of AFPs recorded at the arbitrarily chosen gaging station: 316-Yahyabey, which is one of the 62 series used. And, Table 6 presents the magnitudes of the parameters of the GLO distribution by the methods of (1) Moments, (2) PWMs, and (3) ML, and Fig. 1 shows the histogram of relative frequencies of the elements of the series in Table 5 along with the probability density functions of the three versions of the GLO distribution, GLO-Moments, GLO-PWMs, and GLO-ML.

Histogram of relative frequencies of the series of AFPs given in Table 5 along with the probability density functions of the GLO distribution whose parameters are computed by the methods of (1) Moments, (2) PWMs, and (3) ML
Other than these 62 series of AFPs, we have also used the series of annual maximum rainfalls (AMRs) of 14 standard durations from 5 to 1440 min (24 h) recorded at 154 rain-gaging stations in Turkey up to and including the year 2010 with record lengths between 33 and 70 elements with an average of 44 elements. These data are retrieved from the pertinent files of the General Directorate of State Meteorological Works of Turkey (MGM 1940–2010) by permission [16]. Altogether, there are 2156 (= 154 × 14) series of AMRs. The results of applying the coded computer program on 62 AFPs series in Turkey, on 12 AFPs series in America, and on these 2156 AMRs series in Turkey show that the success ratio of the three-step N-R algorithm using the PWMs magnitudes of the parameters as the initial estimates is much better than the conventional N-R algorithm. The source listing and the exe form of the coded program along with 12 AFPs series in America will be provided to anybody interested naturally freely.
7 Application of the Conventional and the Three-step Newton–Raphson Algorithms on many Synthetically Generated Series with Record Lengths Between 20 and 1000 Elements
The averages of the variation coefficients of so many series of AFPs and AMRs, whose average lengths are 54 and 44, recorded all over Turkey are 0.57 and 0.44. The skewness coefficients of AFPs vary in the range: –0.57 < SC < + 3.73 and those of AMRs vary in the range: –0.39 < SC < + 5.27. The variations of coefficients of variation and skewness of similar hydrologic variables all around the world are close to these intervals. One can find various relevant publications about the ranges of skewness coefficients of fairly long recorded series of AFPs in the world (e.g., [4, 17]). With the purpose of checking the performance of the three-step N-R algorithm for the ML parameters of the GLO distribution, a series of Monte Carlo experiments are performed in the next phase of this study. Many synthetic series of 1 million elements whose means are equal to 1 are generated using the GLO distribution as the parent distribution. In order to keep the number of different synthetic series at a reasonable value, their variation coefficient is assumed to equal 0.5, which is a reasonable overall average. It is a fact that most of the recorded series of AFPs in the world are positively-skewed, and rarely their skewness coefficients are less than –2. Still, for the sake of generality, eight synthetic series having skewness coefficients: SC = –0.1, –1, –2, –3, –4, –5, –7, –10 and eight synthetic series having skewness coefficients: SC = + 0.1, + 1, + 2, + 3, + 4, + 5, + 7, + 10 are generated with a constant mean of 1 and a constant variation coefficient of 0.5. So, altogether 16 synthetic series of one-million-element each are generated.
First, using the analytical relationships among the moments and the parameters, the magnitudes of the three parameters of the GLO distribution are computed for each one of 16 cases. Next, beginning with a seed value of IDUM = –456, a set of 1,300,000 random numbers uniformly distributed in the interval of (0, 1) are computed using the random number generator: RAN1 given in the book: Numerical Recipes by Press et al. [13]. Next, the initial 300,000 elements of this large series are discarded as a precaution for eliminating any possible effect of the magnitude of the seed value on the generated random numbers, and the rest of the 1,000,000 are taken. Assuming each one of the remaining random numbers is equal to the probability of non-exceedence (F in Eq. (4)) of an element, the magnitude of the element, which is assumed to be distributed according to one of those 16 GLO distributions, is computed using the GLO quantile function (Eq. (4)). 1,000,000 generated quantiles are written in the output file row-wise by the format: (20(1PE12.4)), meaning 20 random numbers on one line each having five significant digits.
The computer code computing the parameters of the GLO distribution by the methods of (1) Moments, (2) PWMs, (3) ML by the conventional N-R algorithm, and (4) ML by the three-step N-R algorithm is modified for 1,000,000/n number of non-overlapping n-element series whose input data file is one of the 16 one-million-element synthetic series. We have run the program with the same input file 11 times for sample series lengths of n = 20, 20, 30, 40, 50, 60, 80, 100, 200, 500, 1000, and the total number of runs is 176 for 176 (= 16 × 11) combinations. Again, the source listings and the exe forms of the coded programs, one generating the synthetic data, and the other computing the GLO parameters by the mentioned methods, will be provided to anybody interested freely.
8 Results and Discussion
The three-step Newton–Raphson algorithm put forth by Haktanir [11] for the generalized extreme values distribution is applied to the generalized logistic (GLO) distribution in this study. The procedure presented by Rao and Hamed [1], which is the solution of the simultaneous three equations directly by the iterative Newton–Raphson (N-R) method using the magnitudes of the three parameters given by the method of moments as the initial estimates is observed to be unsuccessful for a non-negligible number of series of both annual flood peaks (AFPs) and annual maximum rainfalls (AMRs) recorded in Turkey. The three-step N-R method performs much better than the former approach, the conventional N-R algorithm. The specific results can be summarized as follows.
The skewness of the GLO distribution is a function of the shape parameter only. It is observed on many recorded series of AFPs and AMRs with average lengths of 54 and 44 elements that the magnitudes of the shape parameter by the method of maximum-likelihood (ML) are considerably different from those by the method of moments. But, the difference between the shape parameters by the methods of ML and the probability-weighted moments (PWMs) is much smaller than the difference between those by the ML and the Moments methods. Yet, differences in magnitudes of the other two parameters, the scale and location parameters, among all of the three methods of ML, PWMs, and Moments are much smaller than those of the shape parameter. This fact is observed on all of (1) 12 AFPs series observed in America having an average length of 54 elements, (2) 62 AFPs series observed in Turkey having an average length of 54 elements (coincidence), (3) 2156 AMRs series observed in Turkey having an average length of 44 elements, and (4) thousands of synthetically generated series having lengths between 20 and 1000 elements.
Choosing the magnitudes given by the PWMs method as the initial estimates instead of those by the method of moments to the conventional N-R algorithm is observed to improve its convergence ratio. The success ratio of the three-step N-R algorithm even with the Moments values taken as the initial estimates is still greater than that by the conventional N-R algorithm using the PWMs values as the initial estimates. However, it is observed in a clear-cut manner that the convergence success ratio of the three-step N-R algorithm is much better than that of the conventional N-R method.
The success ratio of the three-step N-R algorithm drops slightly with increasing skewness coefficient and with decreasing sample lengths. The success ratios of non-overlapping 50,000 series of 20-elements extracted from one-Million-element series synthetically generated by two GLO distributions, one having a skewness coefficient of –10 and the other + 10 as parent distributions, are 97.7% and 93.4% by the three-step N-R algorithm, while the success ratios by the conventional N-R algorithm are 74.5% and 71.6%, respectively. For commonly encountered series having record lengths greater than 30 elements and with skewness coefficients in the range: + 1 < SC < + 3, the success ratio of the three-step N-R algorithm is almost 100%.
The differences in magnitudes of all of the three parameters by all of the three methods of Moments, PWMs, and ML get narrower with increasing series lengths.
9 Conclusion
The three-step Newton–Raphson algorithm proposed by Haktanir [11] for estimation of the parameters of the generalized extreme values distribution by the maximum-likelihood method is adapted to the generalized logistic (GLO) distribution. It is shown on many real-life recorded sample series of annual flood peaks and annual maximum rainfalls with average lengths of 54 and 44 elements, and on thousands of synthetically generated series of lengths between 20 and 1000 elements that the three-step Newton–Raphson algorithm yields convergent solutions for the three parameters of the GLO distribution by the method of maximum-likelihood with a much better success ratio than the conventional Newton–Raphson approach.
References
Rao AR, Hamed HH (2000) Flood Frequency Analysis. CRC Press, LLC 2000, N.W., Corporate Blvd, Boca Raton, FA 33431, USA.
Reed DW (1999) Overview, Flood Estimation Handbook, Volume 1. Institute of Hydrology, Centre for Ecology & Hydrology, Wallingford, Oxfordshire OX10 8BB, UK.
Robson A, Reed D (1999) Statistical Procedures for Flood Frequency Estimation, Flood Estimation Handbook, Volume 3. Institute of Hydrology, Centre for Ecology & Hydrology, Wallingford, Oxfordshire OX10 8BB, UK.
WMO (2009) Guide to Hydrological Practices, Volume II, Management of Water Resources and Application of Hydrological Practices. WMO-No 168, Sixth edition.
Alkasasbeh MR, Raqab MZ (2009) Estimation of the generalized logistic distribution parameters: Comparative study. Stat Methodol 6:262–279
Khamnei HJ, Abusaleh S (2017) Estimation of parameters in the generalized logistic distribution based on ranked set sampling. Int J Nonlinear Sci 24(3):154–160
Hosking JRM, Wallis JR, Wood EF (1985) Estimation of the general extreme-value distribution by the method of probability-weighted moments. Technometrics 27(3):251–261
Prescott P, Walden AT (1980) Maximum likelihood estimation of the parameters of the generalized extreme-value distribution. Biometrika 67(3):723–724
Wilks DS (1992) Comparison of three-parameter probability distributions for representing annual extreme and partial duration precipitation series. Water Resour Res 29(10):3543–3549
Shao Q (2002) Maximum likelihood estimation for generalized logistic distributions. Commun Stat 31(10):1687–1700
Haktanir T (2008) Three-step N-R algorithm for the maximum-likelihood estimation of the general extreme values distribution parameters. Adv Eng Softw 39(5):384–394
Hosking JRM, Wallis JR (1997) Regional frequency analysis, an approach based on L-moments. Cambridge University Press, Cambridge
Press WH, Teukolsky SA, Vetterling WT, Flannery BP (1992) Numerical Recipes in Fortran 77, The Art of Scientific Computing, Second Edition, Volume 1 of Fortran Numerical Recipes. Cambridge University Press, London, UK.
Landwehr JM, Matalas NC, Wallis JR (1979) Probability weighted moments compared with some traditional techniques in estimating Gumbel parameters and quantiles. Water Resour Res 15(5):1055–1064
DSI (1935–2011) Annual Year Books of Records of Gauged Discharges of Natural Streams in Turkey. General Directorate of State Water Works, Yucetepe, Ankara, Turkey.
MGM (1940–2010) Records of Gauged Standard-Duration Extreme Rainfalls in Turkey. General Directorate of Meteorological Works, Rasattepe, Ankara, Turkey.
Cunnane C (1989) Statistical Distributions for Flood Frequency Analysis. WMO Operational Hydrology Report No.33. World Meteorological Organization, Geneva, Switzerland.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all authors, as the corresponding author, I state that there is no conflict of interest in the study whose summary is written in this manuscript.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Acanal, N., Haktanir, T. Computation of Maximum-Likelihood Parameters of the Generalized Logistic Distribution by Three-Step Newton–Raphson Algorithm. J Stat Theory Pract 16, 44 (2022). https://doi.org/10.1007/s42519-022-00243-1
Accepted:
Published:
DOI: https://doi.org/10.1007/s42519-022-00243-1