
Abstract
The simultaneous consideration of the disturbance attenuation problem and the asynchronous switching problem in the discrete-time linear switched systems with state delay and persistent dwell time structure is an important issue that has not been investigated yet to guarantee the finite-time H∞ performance of these systems. To tackle this problem, this paper presents an asynchronous finite-time H∞ control scheme for this class of systems through multiple Lyapunov–Krasovskii functional and persistent dwell time switching signals. To guarantee the finite-time H∞ performance of the whole system, a series of non-convex conditions together with new conditions for the switching signal have been extracted. Also, the disturbance attenuation level is obtained. To be able to solve the non-convex problem with common software, the linear matrix inequality problem has been chosen. Finally, the proposed scheme has been validated through two numerical simulations and the results show the effectiveness of the proposed scheme.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Switch systems have recently received much attention as a class of hybrid systems because of their theoretical and practical significance. They consist of multiple modes with a sub-system in each mode and a switching signal that activates modes at different times. Switched systems can accurately describe the structural hybrid features of real-world application systems. They include a wide range of applications in power electronics, chemical processes, networked control, flight control, etc. Also, changing the parameters of a system, sudden changes in the environment, occurring faults, etc. provide the conditions for using the switched models for different systems (Sun and Ge 2011; Yang et al. 2014; Hespanha and Morse 1999). In addition to the dynamics assigned for subsystems, the features of the switching signals are effective in the closed-loop stability of the switched system (Lin and Antsaklis 2009). So, some of the important Lyapunov functions including switched Lyapunov function, multiple Lyapunov functions, and common Lyapunov functions are usually used to ensure the stability of the system under the arbitrary, dwell time, average dwell time, and persistent dwell time switching signals (Lin and Antsaklis 2009; Shi et al. 2019).
In some past research studies, the stability of discrete-time delay switched systems has been analyzed without considering the uncertainties (Park et al. 2017). In some other works, conditions have been extracted for robust stability in the presence of uncertainties (Baleghi and Shafiei 2018a; Kermani and Sakly 2018). Moreover, considering the exogenous disturbances, H∞ stability has been ensured in Wang et al. (2012), Tian et al. (2015) and Dong et al. 2019). The stabilization problem for discrete-time delayed switched systems has been investigated in many studies. Reference Zhang et al. (2007) presents a robust stabilization for the delayed switched systems in the presence of exogenous disturbances. Considering the polytopic uncertainties together with exogenous disturbances, H∞ performance has been proven in Zhang et al. (2010). Using the switched Lyapunov function, the robust stabilization of the delayed switched systems considering the norm-bounded uncertainties has been investigated in Du et al. (2008) and Zhang et al. (2008). Also, for the nonlinear delayed switched systems considering the parametric and norm-bounded uncertainties, robust stabilization has been proved in Xiang and Wang (2011) and Baleghi and Shafiei (2018b). The Lyapunov stability procedure considers the infinite-time response and does not focus on the transient response (Khalil 2014). However, for some cases with a large number of state variables, this fact does not work (Yan and Wu 2019; Zhang et al. 2015). In such systems, the stability analysis through the Lyapunov theory is not suitable (Amato et al. 2001). To tackle this problem, a definition of finite-time stability (FTS) (Weiss and Infante 1967) for nominal systems has been presented. Moreover, for systems considering exogenous disturbances, finite-time boundedness (FTB) stability has been presented in Amato et al. (2001) and Shen et al. (2015). In the FTB, we are ensured that the variables of the system do not exceed a prescribed bound considering the exogenous disturbances of finite duration. In many recent studies, delayed stochastic switched systems, singular switched systems, neutral switched systems, constrained switched systems, and other types of switched systems (Chen et al. 2016; Xiang et al. 2012a, b; Thanh et al. 2017; Lin et al. 2017; Gholami and Shafiei 2021; Wang et al. 2016, 2021; Zong et al. 2013; Cui et al. 2022; Mao et al. 2021; Mao et al. 2022) have been investigated for their responses in finite-time intervals.
In practical systems, not all switches are necessarily ideal and do not occur as expected. In other words, we might expect to have switched to a certain controller but still remain in the previous state. Therefore, we can encounter asynchronous switching, which may have consequences such as system instability. Also, the existence of exogenous disturbances reduces the control performance. To the best of our knowledge to date, the development of a finite-time control scheme to simultaneously encounter asynchronous switching and the effect of exogenous disturbances in delayed switched systems has not been investigated. Therefore, guaranteeing H∞ finite-time performance in the switched systems with asynchronous and delay structures is considered the first motivation of this paper. In previous works extended by multiple Lyapunov–Krasovskii functional (MLKF), the stability boundary condition imposes a dwell-time limitation on the switching signal. Therefore, the second motivation is to simultaneously design the finite-time control scheme and the switching signal with the PDT structure to reduce the dwell-time limitation compared to other structures. According to these research motivations, for the first time, we intend to develop a simultaneous design of H∞ finite-time scheme and PDT switching signal using MLKF for the delayed linear switched systems subjected to asynchronous switching and exogenous disturbances. The challenges and difficulties in the proposed simultaneous design using MLKF for delayed switched systems are as follows:
-
The Lyapunov–Krasovskii stability condition must be converted to an LMI Lyapunov–Krasovskii stability constraint. This conversion is complicated despite the state delay, exogenous disturbance and asynchronous switching terms. This problem has been solved using appropriate lemma and change of variables.
-
The design of PDT switching signal guaranteeing finite-time bounded despite the exogenous disturbance and asynchronous switching terms is complicated. This problem is solved by specific design of PDT switching signal compared to other PDT designs.
-
The computation of disturbance attenuation level guaranteeing non-weighted H∞ finite-time performance despite the exogenous disturbance and asynchronous switching terms is complicated. This problem is solved by specific design of PDT switching signal and new assumptions on PDT structure.
The remainder of this essay is divided into the following categories. The topic is presented in Sect. 2, along with a number of lemmas and presumptions. Section 3 provides the results of the recommended scheme. The performance of the suggested scheme is supported by two numerical examples in Sect. 4, and the conclusion is offered in Sect. 5.
2 Problem formulation
Consider a discrete-time linear delayed switched system as follows:
where \(x(d) \in R^{n_x }\) and \(u(d) \in R^{n_u }\) are the state and the control input, respectively. The switching signal is revealed by \(\sigma (d):[0\,\infty ) \to M = \{ 1,2, \ldots ,m\}\). \(h\) and \(\theta (r)\) represents the state delay and function of initial conditions. \(d\) is an unknown constant state delay that has a known upper bound \(\left( {h \le h_M } \right)\). \(M_{\sigma (d)} ,D_{\sigma (d)} ,B_{\sigma (d)} ,O_{\sigma (d)} ,T_{\sigma (d)}\) and \(N_{\sigma (d)}\) are known real matrices that have appropriate dimensions. It is noted that all subsystems are stabilizable and have a common equilibrium point. Also, there is a discrepancy \(d_{{\mathrm{syn}}}\) between switching of controllers and the switching of subsystems. It is assumed that the upper bound of the mismatched intervals \(\left( {d_{{\mathrm{syn}}} \le d_{{\mathrm{syn}},m} } \right)\) is known. Hence, the state feedback control law is considered as follows:
Therefore, the switching system (1) is recast for subsystem i in both the matched and mismatched periods:
where \({\rm T}^\downarrow\) and \({\rm T}^\uparrow\) denote matched intervals and mismatched intervals, respectively.
Assumption 1
For a given constant \(d_I\), the exogenous disturbance \(\Delta (d)\) is time-varying that satisfies the constraint:
The calculation of the state feedback control law for the linear delayed switched system described in (1)–(3) with the aim of guaranteeing finite time H∞ performance is the key subject of this paper. Hence, the following lemmas and definitions are needed.
Lemma 1
(Aminsafaee and Shafiei 2019) The following inequalities are equivalent (Schur complement lemma):
where \(A = A^{T}\) and \(C = C^{T}\) are nonsingular matrices.
Definition 1
(Finite time bounded) (Shi et al. 2018): if, for a given matrix \(R > 0\), two positive constants \(k_1\), \(k_2\), with \(k_1 < k_2\), a positive integer \(d_I\), and a switching signal \(\sigma (d)\), we have: \(x(0)^{T} Rx(0) < k_1 \Rightarrow x(d)^{T} Rx(d) < k_2\), \(\forall r = 1, \ldots ,d_I\), then the discrete-time linear switched system (1) with \(u(d) \equiv 0\) subject to an exogenous disturbance \(\Delta (d)\) is described as finite time bonded with regard to \((k_1 ,k_2 ,R,d_I ,ub,\sigma )\).
Definition 2
(Finite time H∞ performance) (Shi et al. 2018): if, for a given matrix \(R > 0\), two positive constants \(k_1\), \(k_2\), with \(k_1 < k_2\), a positive integer \(d_I\), and a switching signal \(\sigma (d)\), we have: \(x(0)^{T} Rx(0) = 0 \Rightarrow x(d)^{T} Rx(d) < k_2 \quad \forall r = 1, \ldots ,d_I\) and:
then the discrete-time linear switched system (1) with \(u(d) \equiv 0\) subject to an exogenous disturbance \(\Delta (d)\) is said to have finite-time H∞ performance with regard to \((0,k_2 ,R,d_I ,ub,\sigma )\).
Definition 3
(PDT switching signal) (Fan et al. 2020): the PDT structure divides time interval into a number of stages. Each stage is broken down into a \(d_\tau\)-portion and a \(d_T\)-portion. A designated sub-system is activated in the \(d_\tau\)-portion with the running time at least \(d_\tau\). The total switching number in the \(d_T\)-portion satisfies the equation \(N\left( {d_{s_p + 1} ,d_{s_p + 1} } \right) \le fd_T\), where \(f\) is the maximum switching rate, \(d_\tau\) is persistent dwell-times, and \(d_T\) is persistence period.
3 Main results
For the closed-loop switched system described in (1)–(3), this section gives the necessary criteria to ensure the finite-time H∞ performance using MLKF and PDT switching signals. The following theorem defines the critical findings of this study.
Theorem 1
Take into account the state feedback control rule and the discrete-time Lipschitz linear delayed switching system in (1)–(3) under Assumptions 1. In addition, constants for \({\xi }_{s}<0\), \({\xi }_{{\mathrm{as}}}>0\), \(\mu > 1\) and \(\gamma > 0\) are provided. T, f, and \(d_{{\mathrm{syn}},m}\) are also chosen as the PDT structure's parameters. If for each subsystem i, there exists matrices \(S_i > 0\), \(Q > 0\), and \(K_i\) such that the following inequalities be feasible:
where
and the PDT switching signal satisfies:
then for the state feedback control law \(u_i (d) = K_i x(d)\), the closed-loop switched system described in (1)–(3) has finite-time H∞ performance with respect to \((0,k_2 ,R,d_I ,ub,\tilde{\gamma },\sigma )\) against asynchronous switching where \(\tilde{\gamma } = \gamma \sqrt {\mu^{(\frac{d_I }{{d_T + d_\tau }} + 1)(d_T f + 1)} (1 + \xi_s )^{d_I } (\frac{{1 + \xi_{{\mathrm{as}}} }}{1 + \xi_s })^{(\frac{d_I }{{d_T + d_\tau }} + 1)(d_T f + 1)d_{{\mathrm{syn}},m} } }\), and \(\kappa_2 = \min_{i \in M} (\lambda_{\min } (\overline{S}_i ))\).
Proof
The proof of the theory is carried out in three steps.
Step 1: The candidate Lyapunov–Krasovskii functional, the Lyapunov stability condition in matched intervals and mismatched intervals, and the stability boundary condition are considered as follows:
-
1.
Proof of finite-time bounded respected to \((0,c_2 ,R,d_I ,ub,\gamma ,\sigma )\)
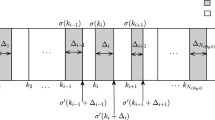
Let \(d_{s_r + 1}\) and \(d_{s_{r + 1} }\) stand for the switching instants that come following \(d_{s_r }\) in the r-th stage and the (r + 1)th stage, respectively. Think about \(\sigma (d_{s_{r + 1} } ) = n\), \(\,\sigma (d_{s_r } ) = m\), and \(\xi = \left\{ {\begin{array}{*{20}c} {\xi_s \,\,\,d \in T^\downarrow } \\ {\xi_{{\mathrm{as}}} \,\,\,d \in T^\uparrow } \\ \end{array} } \right.\). The fluctuation of the Lyapunov function between two successive samples in the r-th stage is derived as follows thanks to the PDT structure illustrated in Fig. 1 and combining (16)–(18):

Two sub-systems for activation of the drinking water supply network (DWSN)
According to (19), the difference in the Lyapunov function between two successive switches at the r-th stage is calculated as:
Consider the total number of switching, the total running time of the matched intervals and the total running time of the mismatched intervals in a given interval as \(N\), \(T_s\) and \(T_{{\mathrm{as}}}\), respectively. The fluctuation of the Lyapunov function in the whole r-th stage total interval is derived as per Definition 3 and utilizing (20):
Based on (21), it is concluded that following inequality holds in interval \([d_0 ,d]\):
\(d_{Tr}\) and \(d_{Tr}\) are the running times in the—portion and the T-portion, respectively, and together they make up the overall running time in the r-th stage. Since \(d_{Tr} \le d_T\) and \(d_{\tau r} \ge d_\tau\) are true, and supposing \(d_\tau f > 1\), it is simple to arrive to \((d_\tau f - 1)(d_{Tr} - d_T ) \le 0\). The following results are obtained when the interval \([d_0 ,d]\) is in the r-th stage:
Additionally, (23) is valid for additional stages. One may write by adding up the steps between \([d_0 ,d]\):
Substituting (24) into (22), we have:
Considering \(\overline{S}_i = R^{ - \frac{1}{2}} S_i R^{ - \frac{1}{2}}\), we get:
Due to (26)–(27) and substituting (14) into (25), we get:
-
2.
Proof of inequality (9)
Based on (22), the variation of Lyapunov function in interval \([k_0 ,k]\) is as follows:
Due to \(v_{\sigma (d_0 )} (x(d_0 )) = 0\) and \(v_{\sigma (d)} (x(d)) \ge 0\), we have:
Substituting (24) in (30), we have:
where
Step 2: The inequalities (16)–(17) are formulated as non-convex matrix inequality. \(\Delta v_1\) is extended along the trajectories of the closed-loop system:
By extending \(\Delta v_2\) as follows:
Substituting (33) and (34) into (16):
According to the upper bound of the delay, if (36) holds, then (35) holds:
Considering \(\sigma (d) = i\), (36) is rewritten as:
inequality (37) holds, if following inequality satisfy:
Remark 1
The inequality (11) is also derived by (17), like the earlier step.
Step 3: The inequalities (18) are formulated as a non-convex matrix inequality. According to (18), we have
It is concluded that if (40) holds, (39) holds:
Considering \(\sigma (d) = i\) and \(\sigma (d - 1) = j\), (12) is confirmed and Theorem 1 is proved.
Theorem 2
Through Theorem 1, if there exists matrices \(u_i > 0\), \(w > 0\), \(y_i\), and \(x_i\) for each subsystem i such that the following inequalities be feasible:
Then, for the state feedback control gain \(K_i = \,y_i x_i^{ - 1}\) and the PDT switching signal satisfying (14), the closed-loop switched system described in (1)–(3) has finite-time H∞ performance with respect to \((0,c_2 ,R,d_I ,ub,\tilde{\gamma },\sigma )\) against asynchronous switching.
Proof
Firstly, the LMI constraint related to inequality (10) is proved. Inequality (10) can be rewritten as follows:
By applying Lemma 1 to the above inequality, we obtain:
Consider \(u_i = \,S_i^{ - 1}\), \(w = \,Q^{ - 1}\), and \(y_i = K_i \,x_i\), we have:
Multiplying left and right sides of inequality (40) by \(b{\mathrm{diag}}(x_i^T ,x_i^T ,I,x_i^T ,\ldots,x_i^T ,I)\) and \(b{\mathrm{diag}}(x_i ,x_i ,I,x_i ,\ldots,x_i ,I)\), respectively:
Utilizing Lemma 1 several times, we have:
From the feasibility of (49), it can be concluded that \(x_i^T u_i^{ - 1} x_i > 0\) and \(x_i^T w^{ - 1} x_i > 0\). Therefore, \(x_i\) and is full rank. Developing \((u_i - x_i )^T u_i^{ - 1} (u_i - x_i ) \ge 0\) and \((w - x_i )^T w^{ - 1} (w - x_i ) \ge 0\):
According to (49)–(50), it can be inferred that if the inequality (41) holds, the above inequality also.
Remark 2
The inequality (42) can also be derived by converting the inequality (11) as described above.
Based on inequality (12), mentioned change of variable and using Lemma 1 twice, we have
Therefore, inequality (51) confirms (43) and Theorem 2 is proved.
Remark 3
It is worth pointing out that we must firstly solve LMI problem (41)–(43) to gain \(P_i\), which can let us find \(\kappa_1\) and \(\kappa_2\), then switching signal is designed by substituting \(\kappa_1\) and \(\kappa_2\) into (14).
Remark 4
To achieve a feasible solution for the LMI problem described in (41)–(43), decision parameters (\(\mu ,\,\xi_s ,\,\xi_{{\mathrm{as}}}\)) play important roles.
4 Numerical simulations
Through two numerical examples, we examine the performance of the suggested approach in this section. MATLAB simulations have been carried out using the YALMIP toolset.
Example 1
This example examines a drinking water supply network (DWSN) (Benallouch et al. 2014). Pipes, valves, reservoirs, water storage, pumps, water collection, water purification, and consumers are typical components of the DWSN. A linear discrete-time switching system with two subsystems that has reservoir volumes as its state vector and all controlled reservoir inflows as its input vector can be used to describe the behavior of the DWSN (Fig. 1). Two subsystems are thought of as:
Sub-system 1:
Sub-system 2:
The goal is for closed-loop system to have the finite time H∞ performance with respect to \((0,\,30,\,I,\,30,\,3,\sigma )\). The parameters of the controller and switching signal are selected as \(\xi_s = 0.01\), \(\xi_{{\mathrm{as}}} = 0.04\), \(\mu = 1.08\), \(d_{{\mathrm{syn}},m} = 1\min\), \(d_T = 10\min\) and \(f = 0.5\frac{1}{\min }\). By Solving the LMI problem (41)–(43), we obtain:
By having \(S_1\), \(S_2\), and \(R = I\), we obtain \(\kappa_2 = \min_{i \in M} (\lambda_{\min } (\overline{S}_i )) = 4.6138\). Finally, considering \(\gamma = 1\) and using (14), we obtain \(d_\tau^* = 6.60\min\). An example of a switching signal satisfying the design parameters is shown in Fig. 2. Figure 2 also shows the system states that ultimately converge to zero and consequently, the specified bound is satisfied. Figure 3 shows the system state trajectory that gives a better view of the variations in states.

The system states of the drinking water supply network (DWSN)

The states trajectory of the drinking water supply network (DWSN)
In Fig. 4, the time response of \(x^T x\) is depicted. From this graph, it can be deduced that the closed-loop switched system satisfies finite time H∞ criteria with specification \((0,\,30,\,I,\,30,\,3,\sigma )\) against asynchronous switching. In fact, the proposed scheme controls the rate of energy variation in both matched and mismatched time intervals with the presence of asynchronous switching, allowing \(x^T x\) to satisfy the specified bound in the time interval. The control input for the switched system is shown in Fig. 5.

The time response of \(\left\| x \right\|^2\)

The control input of the drinking water supply network (DWSN)
The comparison between the proposed scheme and control scheme extended by Gholami and Shafiei (2021) is shown in Table 1. This table shows that proposed scheme has less convergence time and less average of \(\Vert x\Vert \). In fact, the control scheme extended by Gholami and Shafiei (2021) does not take into account the asynchronous switching phenomena and considers the switching signal based on the average dwell time structure that is robust to a smaller class of switching signal compared to a persistent dwell time structure. These issues reduce control performance.
Example 2
Think about a model of discretized water pollution. The intended model depicts, respectively, the concentrations of dissolved oxygen and biological oxygen demand per unit volume at time d. The purpose of this example is to illustrate how the requirements in Theorem 2 may be used to create the suggested scheme for this model. There is a switch between the two subsystems listed below:
Subsystem 1:
Subsystem 2:
We would make the closed-loop water pollution system finite time stable with respect to \((0,\,20,\,I,\,30,\,3,\sigma )\). The parameters of the controller and switching signal are selected as \(\xi_s = 0.02\), \(\xi_{{\mathrm{as}}} = 0.05\), \(\mu = 1.05\), \(d_{{\mathrm{syn}},m} = 2s\), \(d_T = 10s\) and \(f = 0.25Hz\). Solving the LMI problem (41)–(43), we obtain:
Based on \(S_1\), \(S_2\), and \(R = I\), we obtain \(\kappa_1 = \max_{i \in M} (\lambda_{\max } (\overline{S}_i )) = 13.82\) and \(\kappa_2 = \min_{i \in M} (\lambda_{\min } (\overline{S}_i )) = 13.20\). Finally, considering \(\gamma = 1\) and using (12), we obtain \(d_\tau^* = 6.27\). Figures 6, 7 and 8 show the system states, the variation of Lyapunov function, the time response of \(\left\| x \right\|^2\) and control input of water pollution system. Analysis of these figures confirms that closed-loop system is finite time stable with respect to \((1,\,20,\,I,\,30,\,3,\sigma )\), and the required performance is satisfied.

The system states of the water pollution system

The time response of \(\left\| x \right\|^2\)

The input of the water pollution system
5 Conclusion
In this study, using multiple Lyapunov–Krasovskii functionals, a finite-time H∞ state feedback strategy against asynchronous switching was developed in the linear delayed switched systems with the PDT switching signal. A number of non-convex constraints as well as additional switching signal conditions were extracted to ensure the system's finite-time H∞ criteria. The level of disturbance attenuation is also measured. The linear matrix inequality problem was selected so that the non-convex issue could be solved using standard tools. Finally, numerical simulations verified the recommended strategy, and the results showed it to be effective. Future studies will find it difficult to construct a finite-time H∞ asynchronous output feedback strategy in linear switched systems.
Data availability
The authors do not have permissions to share data.
References
Amato F, Ariola M, Dorato P (2001) Finite-time control of linear systems subject to parametric uncertainties and disturbances. Automatica 2001:1
Aminsafaee M, Shafiei MH (2019) Stabilization of uncertain non-linear discrete-time switched systems with state delays: a constrained robust model predictive control approach. J Vib Control 25:2079–2090
Baleghi NA, Shafiei MH (2018a) Stability analysis for discrete-time switched systems with uncertain time delay and affine parametric uncertainties. Trans Inst Meas Control 2018a:1
Baleghi NA, Shafiei MH (2018b) Design of static and dynamic output feedback controllers for a discrete-time switched non-linear system with time-varying delay and parametric uncertainty. IET Control Theory Appl 2018b:1
Benallouch M, Schutz G, Fiorelli D, Boutayeb M (2014) H∞ model predictive control for discrete-time switched linear systems with application to drinking water supply network. J Process Control 24:924–938
Chen Y, Liu Q, Lu R, Xue A (2016) Finite-time control of switched stochastic delayed systems. Neurocomputing 2016:1
Cui D, Zou W, Guo J, Xiang Z (2022) Neural network-based adaptive finite-time tracking control of switched nonlinear systems with time-varying delay. Appl Math Comput 428:127216
Dong Y, Liang S, Wang H (2019) Robust stability and H∞ control for nonlinear discrete-time switched systems with interval time-varying delay. Math Methods Appl Sci 2019:1
Du D, Jiang B, Zhou S (2008) Delay-dependent robust stabilisation of uncertain discrete-time switched systems with time-varying state delay. Int J Syst Sci 2008:1
Fan Y, Wang M, Sun G, Yi W, Liu G (2020) Quasi-time-dependent robust H∞ static output feedback control for uncertain discrete-time switched systems with mode-dependent persistent dwell-time. J Frankl Inst 357:10329–10352
Gholami H, Shafiei MH (2021) Finite-time H∞ static and dynamic output feedback control for a class of switched nonlinear time-delay systems. Appl Math Comput 389:125557
Hespanha JP, Morse AS (1999) Stability of switched systems with average dwell-time. In: 38th IEEE conf. decision control
Kermani M, Sakly A (2018) On robust stability analysis of uncertain discrete-time switched nonlinear systems with time varying delays. Math Problems Eng 2018:1
Khalil HK (2014) Nonlinear control. Prentice-Hall, London
Lin H, Antsaklis PJ (2009) Stability and stabilizability of switched linear systems: a survey of recent results. IEEE Trans Autom Control 2009:1
Lin X, Li S, Zou Y (2017) Finite-time stabilization of switched linear time-delay systems with saturating actuators. Appl Math Comput 299:66–79
Mao J, Yan T, Huang S, Li S, Jiao JG (2021) Sampled-data output feedback leader-following consensus for a class of nonlinear multi-agent systems with input unmodeled dynamics. Int J Robust Nonlinear Control 31(9):4203–4226
Mao J, Zou W, He W, Xiang Z (2022) Practical Finite-time sampled-data output feedback stabilization for a class of upper-triangular nonlinear systems with input delay. IEEE Trans Syst Man Cybern Syst 2022:1
Park MJ, Kwon OM, Choi SG (2017) Stability analysis of discrete-time switched systems with time-varying delays via a new summation inequality. Nonlinear Anal Hybrid Syst 2017:1
Shen H, Park JH, Wu Z-G, Zhang Z (2015) Finite-time H∞ synchronization for complex networks with semi-Markov jump topology. Commun Nonlinear Sci Numer Simul 2015:1
Shi S, Shi Z, Fei Z, Liu Z (2018) Finite-time output feedback control for discrete-time switched linear systems with mode-dependent persistent dwell-time. J Frankl Inst 355:5560–5575
Shi S, Shi Z, Fei Z (2019) Asynchronous control for switched systems by using persistent dwell time sub-modeling. Syst Control Lett 2019:1
Sun Z, Ge SS (2011) Stability theory of switched dynamical systems. Springer, New York
Thanh NT, Niamsup P, Phat VN (2017) Finite-time stability of singular nonlinear switched time-delay systems: a singular value decomposition approach. J Frankl Inst 354:3502–3518
Tian E, Wong WK, Yue D et al (2015) H∞ filtering for discrete-time switched systems with known sojourn probabilities. IEEE Trans Autom Control 2015:1
Wang X, Zong G, Sun H (2016) Asynchronous finite-time dynamic output feedback control for switched time-delay systems with non-linear disturbances. IET Control Theory Appl 10:1142–1150
Wang R, Xing J, Xiang Z (2021) Finite-time asynchronous control of linear time-varying switched systems. Int J Adapt Control Signal Process 35(9):1824–1841
Wang D, Shi P, Wang J et al (2012) Delay-dependent exponential H∞ filtering for discrete-time switched delay systems. Int J Robust Nonlinear Control 2012:1
Weiss L, Infante E (1667) Finite time stability under perturbing forces and on product spaces. IEEE Trans Autom Control 1967:1
Xiang Z, Wang R (2011) Robust stabilization of discrete time switched non-linear systems with time delay under asynchronous switching. Trans Inst Meas Control 2011:1
Xiang Z, Qiao C, Mahmoud MS (2012a) Finite-time analysis and H∞ control for switched. Stoch Syst J Frankl Inst 2012a:1
Xiang Z, Sun Y-N, Mahmoud MS (2012b) Robust finite-time H∞ control for a class of uncertain switched neutral systems. Commun Nonlinear Sci Numer Simul 17:1766–1778
Yan R, Wu Z (2019) Super-twisting disturbance observer-based finite-time attitude stabilization of flexible spacecraft subject to complex disturbances. J Vib Control 2019:1
Yang H, Jiang B, Cocquempot V (2014) A survey of results and perspectives on stabilization of switched nonlinear systems with unstable modes. Nonlinear Anal Hybrid Syst 2014:1
Zhang L, Shi P, Boukas EK (2007) H∞ output-feedback control for switched linear discrete-time systems with time varying delays. Int J Control 2007:1
Zhang L, Shi P, Basin M (2008) Robust stability and stabilisation of uncertain switched linear discrete time delay systems. IET Control Theory Appl 2(7):606–614
Zhang L, Li H, Chen Y (2010) Robust stability analysis and synthesis for switched discrete-time systems with time delay. Discrete Dyn Nat Soc 2010:1
Zhang L, Wang S, Karimi HR, Jasra A (2015) Robust finite-time control of switched linear systems and application to a class of servomechanism systems. IEEE ASME Trans Mech 2015:1
Zong G, Wang R, Zheng WX, Hou L (2013) Finite-time stabilization for a class of switched time-delay systems under asynchronous switching. Appl Math Comput 219:5757–5771
Author information
Authors and Affiliations
Contributions
HZ: writing-original draft preparation, conceptualization, supervision, project administration.
Corresponding author
Ethics declarations
Conflict of interest
The author declares that there are no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Zhu, H. Guaranteeing finite-time H∞ performance for asynchronous discrete-time delayed switched systems with persistent dwell time structure. Multiscale and Multidiscip. Model. Exp. and Des. 6, 461–475 (2023). https://doi.org/10.1007/s41939-023-00155-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s41939-023-00155-y